
UAVC: A New Method for Correcting Lidar Overlap Factors Based on Unmanned Aerial Vehicle Vertical Detection



 and
and
Abstract
:1. Introduction
2. Experiment and Method
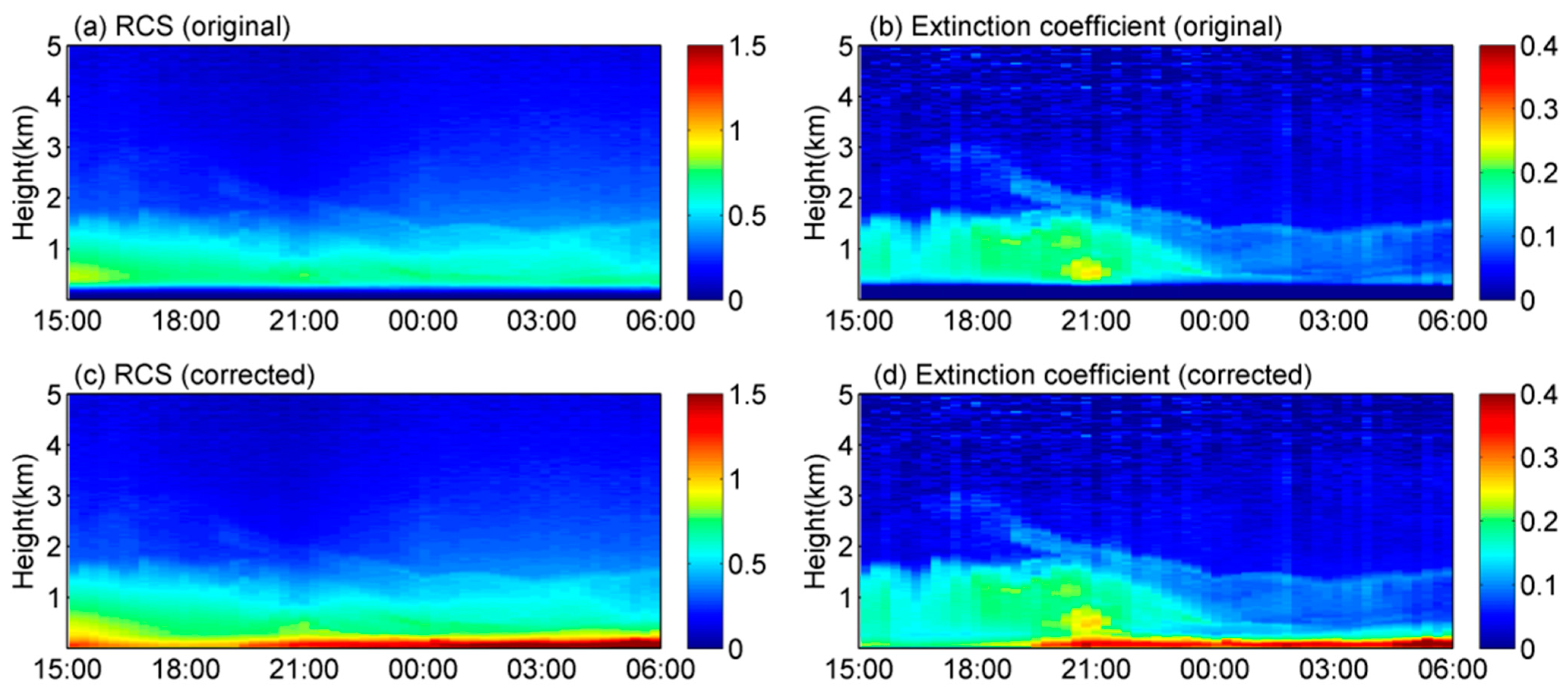
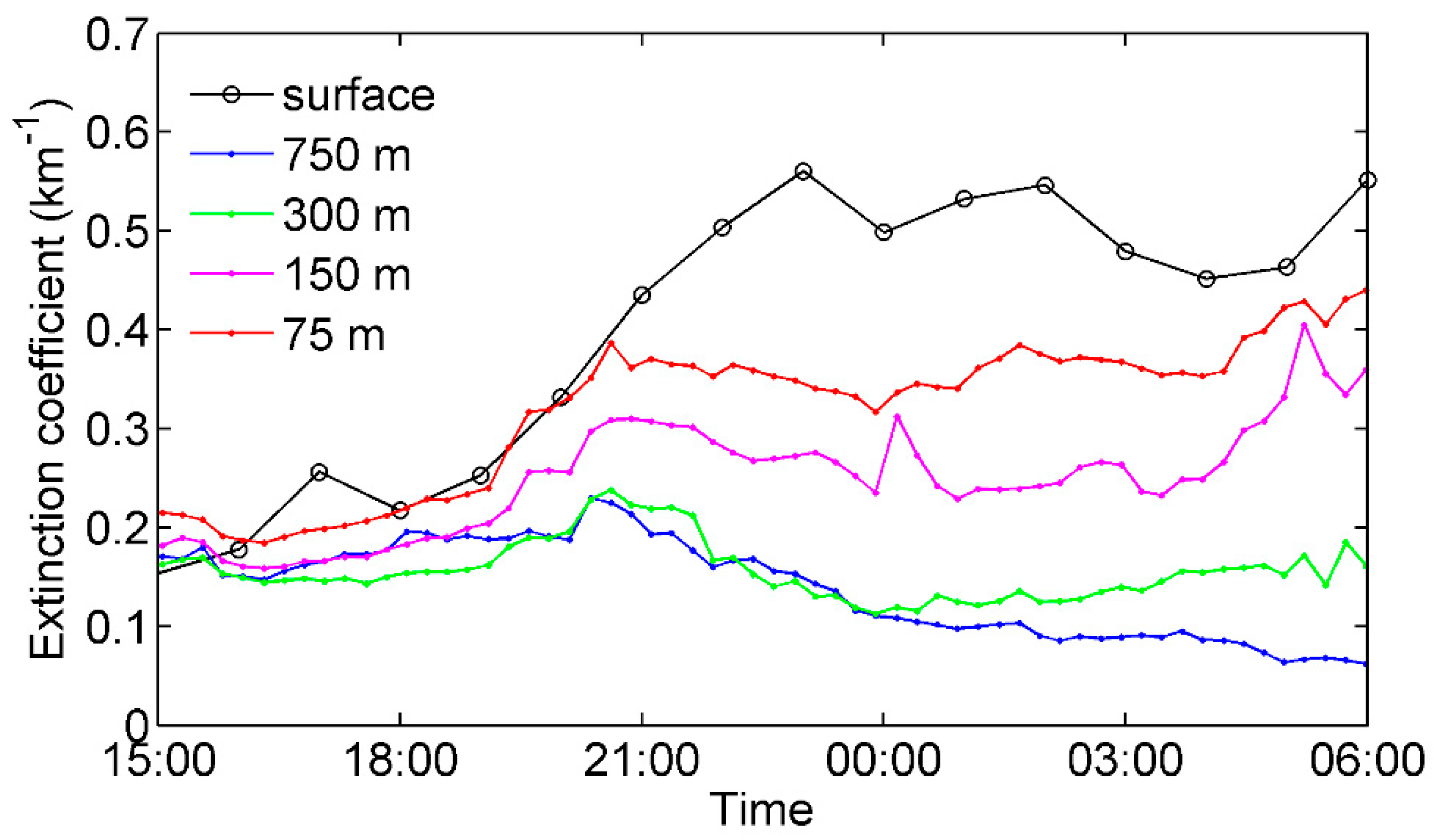
3. Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rosenfeld, D.; Sherwood, S.; Wood, R.; Donner, L. Climate Effects of Aerosol-Cloud Interactions. Science 2014, 343, 379–380. [Google Scholar] [CrossRef]
- Li, S.; Wang, T.; Solmon, F.; Zhuang, B.; Wu, H.; Xie, M.; Han, Y.; Wang, X. Impact of aerosols on regional climate in southern and northern China during strong/weak East Asian summer monsoon years. J. Geophys. Res. Atmos. 2016, 121, 4069–4081. [Google Scholar] [CrossRef] [Green Version]
- Barlow, J.F.; Dunbar, T.M.; Nemitz, E.G.; Wood, C.R.; Gallagher, M.W.; Davies, F.; O’Connor, E.; Harrison, R.M. Boundary layer dynamics over London, UK, as observed using Doppler lidar during REPARTEE-II. Atmos. Chem. Phys. Discuss. 2011, 11, 2111–2125. [Google Scholar] [CrossRef] [Green Version]
- Burkhardt, U.; Kärcher, B.; Schumann, U. Global Modeling of the Contrail and Contrail Cirrus Climate Impact. Bull. Am. Meteorol. Soc. 2010, 91, 479–484. [Google Scholar] [CrossRef] [Green Version]
- Hsueh, H.T.; Ko, T.H.; Chou, W.C.; Hung, W.C.; Chu, H. Health risk of aerosols and toxic metals from incense and joss paper burning. Environ. Chem. Lett. 2011, 10, 79–87. [Google Scholar] [CrossRef]
- Zeng, X.-W.; Vivian, E.; Mohammed, K.A.; Jakhar, S.; Vaughn, M.; Huang, J.; Zelicoff, A.; Xaverius, P.; Bai, Z.; Lin, S.; et al. Long-term ambient air pollution and lung function impairment in Chinese children from a high air pollution range area: The Seven Northeastern Cities (SNEC) study. Atmos. Environ. 2016, 138, 144–151. [Google Scholar] [CrossRef] [Green Version]
- Shen, X.; Sun, J.; Zhang, X.; Zhang, Y.; Zhang, L.; Che, H.; Ma, Q.; Yu, X.; Yue, Y.; Zhang, Y. Characterization of submicron aerosols and effect on visibility during a severe haze-fog episode in Yangtze River Delta, China. Atmos. Environ. 2015, 120, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chen, L.; Chen, L.; Wang, X.; Yu, C.; Si, Y.; Zhang, Z. Interference of Heavy Aerosol Loading on the VIIRS Aerosol Optical Depth (AOD) Retrieval Algorithm. Remote Sens. 2017, 9, 397. [Google Scholar] [CrossRef] [Green Version]
- Cohen, J.B.; Prinn, R.G.; Wang, C. The impact of detailed urban-scale processing on the composition, distribution, and radiative forcing of anthropogenic aerosols. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Yang, Y.; Zheng, Z.; Yim, S.Y.; Roth, M.; Ren, G.; Gao, Z.; Wang, T.; Li, Q.; Shi, C.; Ning, G.; et al. PM 2.5 Pollution Modulates Wintertime Urban Heat Island Intensity in the Beijing-Tianjin-Hebei Megalopolis, China. Geophys. Res. Lett. 2020, 47, e2019GL084288. [Google Scholar] [CrossRef] [Green Version]
- Hua, Y.; Cheng, Z.; Wang, S.; Jiang, J.; Chen, D.; Cai, S.; Fu, X.; Fu, Q.; Chen, C.; Xu, B.; et al. Characteristics and source apportionment of PM2.5 during a fall heavy haze episode in the Yangtze River Delta of China. Atmos. Environ. 2015, 123, 380–391. [Google Scholar] [CrossRef]
- Zhao, M.; Xie, C.-B.; Zhong, Z.-Q.; Wang, B.-X.; Wang, Z.-Z.; Dai, P.-D.; Shang, Z.; Tan, M.; Liu, N.; Wang, Y.-J. Development of High Spectral Resolution Lidar System for Measuring Aerosol and Cloud. J. Opt. Soc. Korea 2015, 19, 695–699. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Huang, J.; Chen, B.; Yi, Y.; Liu, J.; Bi, J.; Zhou, T.; Huang, Z.; Chen, S. Three-Year Continuous Observation of Pure and Polluted Dust Aerosols Over Northwest China Using the Ground-Based Lidar and Sun Photometer Data. J. Geophys. Res. Atmos. 2019, 124, 1118–1131. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Xu, C.; Ji, Y.; Hu, H. Aerosol microphysical parameters’ vertical profiles measured by a dual Raman-Mie lidar during 2007–2013 at Hefei, China. Appl. Opt. 2019, 58, 1537–1546. [Google Scholar] [CrossRef]
- Yang, H.; Fang, Z.; Xie, C.; Cohen, J.; Yang, Y.; Wang, B.; Xing, K.; Cao, Y. Two trans-boundary aerosol transport episodes in the western Yangtze River Delta, China: A perspective from ground-based lidar observation. Atmos. Pollut. Res. 2021, 12, 370–380. [Google Scholar] [CrossRef]
- Halldórsson, T.; Langerholc, J. Geometrical form factors for the lidar function. Appl. Opt. 1978, 17, 240–244. [Google Scholar] [CrossRef] [PubMed]
- Chen, R.; Jiang, Y.; Wen, L.; Wen, D. Calculation of the overlap factor for scanning LiDAR based on the tridimensional ray-tracing method. Appl. Opt. 2017, 56, 4636–4645. [Google Scholar] [CrossRef]
- Stelmaszczyk, K.; Dell’Aglio, M.; Chudzyński, S.; Stacewicz, T.; Wöste, L. Analytical function for lidar geometrical compression form-factor calculations. Appl. Opt. 2005, 44, 1323–1331. [Google Scholar] [CrossRef]
- Sasano, Y.; Shimizu, H.; Takeuchi, N.; Okuda, M. Geometrical form factor in the laser radar equation: An experimental determination. Appl. Opt. 1979, 18, 3908–3910. [Google Scholar] [CrossRef]
- Wandinger, U.; Ansmann, A. Experimental determination of the lidar overlap profile with Raman lidar. Appl. Opt. 2002, 41, 511–514. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Chen, S.; Zhang, Y.; Chen, H.; Guo, P.; Chen, B. Experimental determination of Raman lidar geometric form factor combining Raman and elastic return. Opt. Commun. 2014, 332, 296–300. [Google Scholar] [CrossRef]
- Li, J.; Li, C.; Zhao, Y.; Li, J.; Chu, Y. Geometrical constraint experimental determination of Raman lidar overlap profile. Appl. Opt. 2016, 55, 4924–4928. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Gong, W.; Mao, F.; Pan, Z. Physical constraint method to determine optimal overlap factor of Raman lidar. J. Opt. 2017, 47, 83–90. [Google Scholar] [CrossRef]
- Guerrero-Rascado, J.L.; Costa, M.J.; Bortoli, D.; Silva, A.M.; Lyamani, H.; Alados-Arboledas, L. Infrared lidar overlap function: An experimental determination. Opt. Express 2010, 18, 20350–20369. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Tao, Z.; Liu, N.; Wu, D.; Xie, C.; Wang, Y. New experimental method for lidar overlap factor using a CCD side-scatter technique. Opt. Lett. 2015, 40, 1749–1752. [Google Scholar] [CrossRef]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef]
- Su, J.; Wu, Y.; McCormick, M.P.; Lei, L.; Lee, R.B. Improved method to retrieve aerosol optical properties from combined elastic backscatter and Raman lidar data. Appl. Phys. A 2013, 116, 61–67. [Google Scholar] [CrossRef]
- Mueller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-type-dependent lidar ratios observed with Raman lidar. J. Geophys. Res. Atmos. 2007, 112, D16202. [Google Scholar] [CrossRef]
- Zhou, Z.; Hua, D.; Wang, Y.; Yan, Q.; Li, S.; Li, Y.; Wang, H. Improvement of the signal to noise ratio of Lidar echo signal based on wavelet de-noising technique. Opt. Lasers Eng. 2013, 51, 961–966. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Transmitter | |
| Transmitted wavelength | 355 nm |
| Pulse energy | 50 mJ |
| Pulse repetition rate | 10 Hz |
| Pulse duration | 8 ns |
| Laser beam divergence | 0.2 mrad |
| Receiver | |
| Telescope diameter | 400 mm |
| FOV | 0.5–2 mrad |
| Detect channels | 355, 387, 408 |
| Filter bandwidth | 1 nm |
| Data acquisition | |
| Sample rate | 40 MHz |
| Resolution | 12 bit |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, M.; Fang, Z.; Yang, H.; Cheng, L.; Chen, J.; Xie, C. UAVC: A New Method for Correcting Lidar Overlap Factors Based on Unmanned Aerial Vehicle Vertical Detection. Appl. Sci. 2022, 12, 184. https://doi.org/10.3390/app12010184
Zhao M, Fang Z, Yang H, Cheng L, Chen J, Xie C. UAVC: A New Method for Correcting Lidar Overlap Factors Based on Unmanned Aerial Vehicle Vertical Detection. Applied Sciences. 2022; 12(1):184. https://doi.org/10.3390/app12010184
Chicago/Turabian StyleZhao, Ming, Zhiyuan Fang, Hao Yang, Liangliang Cheng, Jianfeng Chen, and Chenbo Xie. 2022. "UAVC: A New Method for Correcting Lidar Overlap Factors Based on Unmanned Aerial Vehicle Vertical Detection" Applied Sciences 12, no. 1: 184. https://doi.org/10.3390/app12010184
APA StyleZhao, M., Fang, Z., Yang, H., Cheng, L., Chen, J., & Xie, C. (2022). UAVC: A New Method for Correcting Lidar Overlap Factors Based on Unmanned Aerial Vehicle Vertical Detection. Applied Sciences, 12(1), 184. https://doi.org/10.3390/app12010184