1. Introduction
The execution of an unauthorized code is one of the attackers’ main vehicles in their malicious actions. Multiple solutions have been proposed to prevent these attacks at various stages, for example, Data Execution Prevention (DEP) [
1] and driver signing [
2] attempt to prevent the execution and introduction of unauthorized code. Unfortunately, both solutions were circumvented [
3,
4].
In addition to executing new code in kernel mode, attackers may attempt to perform direct kernel-object modification (DKOM) to achieve their goal by overwriting various fields of kernel objects directly. DKOM attacks can be used for privilege escalation and hiding the attack traces. Microsoft’s Kernel Patch Protection (KPP) is an obfuscated integrity checking mechanism for the Windows kernel. As with the previously described security measures, KPP was reverse-engineered, and disabled [
5]. In addition, KPP is not available for the Linux kernel, which also suffers from vulnerabilities [
6]. In particular, 158 new vulnerabilities were discovered in 2021 alone [
7].
We introduce H-KPP, hypervisor-based protection for Linux kernel code and data structures. H-KPP prevents the execution of unauthorized code in kernel mode. In addition, H-KPP protects certain object fields from malicious modifications. H-KPP can protect modern kernels equipped with BPF facilities and loadable kernel modules. H-KPP does not require modifying or recompiling the kernel. Unlike many other systems, H-KPP is based on a thin hypervisor and includes a novel SLAT switching mechanism, which allows H-KPP to achieve very low (≈) performance overhead compared to baseline Linux.
H-KPP accomplishes its main goal using two secondary-level address translation (SLAT) hierarchies: the kernel and user mode hierarchies. The hypervisor switches between the two hierarchies on every mode transition. The kernel-mode hierarchy prevents the execution of all the pages but the pages belonging to the verified kernel and modules. The transition between the hierarchies does not require the hypervisor’s attention, thus keeping the overall system performance at optimum. H-KPP, unlike similar systems, supports modern kernel features, like just-in-time code generation, which is used by the BPF.
H-KPP’s detection of DKOM is based on periodic verifications of various object fields. This behavior is similar to Microsoft’s KPP. However, the functionality of H-KPP in this regard is much broader and is comparable with the functionality of Volatility, an offline forensic investigation tool [
8].
We have verified the effectiveness of H-KPP by using a specially crafted kernel module that mimics some aspects of the malicious behavior of various attacks. It may seem more natural to run an actual attack; unfortunately, the attacks we have found target older versions of the Linux kernel. H-KPP successfully detected all the attacks that were performed by the kernel module.
We have measured the performance of H-KPP code protection using various benchmarks, which showed an average overhead of only ≈. We note that the overhead of full hypervisors, which form the basis for other solutions, is much more significant. In addition, we have evaluated the performance of the periodic kernel object verification. Our main contributions are:
We present the design of H-KPP, a KPP-like system implemented as a thin hypervisor.
We present a novel SLAT-switching technique used by H-KPP, which can be helpful in other scenarios.
We present an online approach for kernel object verification that does not require recompilation of the kernel.
We evaluate the effectiveness of H-KPP using a kernel module that mimics common attacks.
We evaluate the performance of H-KPP.
3. System Design
H-KPP is a thin hypervisor that supports the execution of a single operating system. The hypervisor is embedded in an EFI [
16] application that boots before the operating system and initializes the hypervisor. After successful initialization, the EFI application boots the operating system bootloader, which initializes the operating system itself. The operating system executes under the inspection of H-KPP. The main goal of the hypervisor’s inspection is to prevent the execution of malicious code in kernel mode.
H-KPP accomplishes its main goal using two secondary-level address translation (SLAT) hierarchies, see
Table 1. The first hierarchy, kSLAT, is active when the guest resides in kernel mode, while the second hierarchy, uSLAT, is active when the guest resides in user mode. The hypervisor switches between the two hierarchies on every mode transition. Both hierarchies define identity mapping. This mapping is used solely to prevent undesirable access to some pages. The kSLAT and the uSLAT hierarchies prevent access to the hypervisor’s memory and prevent the modification of the kernel code pages. In addition, the kSLAT hierarchy prevents the execution of all the other pages.
For its correct execution, H-KPP requires information about the underlying operating system. A special tool extracts this information during the installation of H-KPP, before its first execution. The information is then delivered to H-KPP using a configuration file.
3.1. Information Collection
H-KPP requires two types of information about the underlying operating system: (a) kernel symbols, (b) module hashes. The offsets of the kernel’s global variables, function, and structure fields allow H-KPP to inspect the operating system’s internal state during the execution. Before granting execution permissions to the kernel’s code page, H-KPP verifies its integrity by comparing its hash against a pre-calculated set of hashes. A special tool hashes the executable pages of all the kernel modules by traversing either local directories or the official repository of the operating system distributor. The hashes and the offsets are stored in a configuration file, which H-KPP loads during its initialization.
3.2. First-Phase Initialization
H-KPP’s initialization consists of two phases. The first phase takes place before the operating system’s bootloader. The second phase occurs during the initialization of the operating system, after the establishment of its memory layout, which is affected by ASLR [
17].
During its initialization, the EFI application that embeds H-KPP allocates memory for the hypervisor by calling EFI’s AllocatePages function with EfiRuntimeServicesData as its memory type argument. Memory regions allocated with this memory type appear as reserved in the memory map report that the EFI firmware delivers to the operating system. Therefore, benign operating systems and drivers do not access such memory regions.
After allocating memory for H-KPP, the EFI application initializes the hypervisor itself. The initialization includes the configuration of internal data structures and the installation of the SLAT hierarchies. H-KPP’s initialization proceeds by executing the remaining EFI application as the single guest of the hypervisor. The application exits to firmware, which loads the operating system bootloader. The bootloader and the operating system itself execute as a hypervisor guest, thus allowing the hypervisor to inspect their execution. The hypervisor’s memory is protected from the operating system by the SLAT.
As the last step of its first-phase initialization, H-KPP configures the interception of assignments to the LSTAR MSR, which holds the address of the system call handling function. After laying out its code and data structures in the memory, the operating system sets this MSR. Therefore, this MSR can be used as a trigger for the second phase of H-KPP’s initialization.
3.3. Second-Phase Initialization
H-KPP reacts to the operating system’s attempt to set the LSTAR MSR, by completing H-KPP’s initialization. The initialization process assumes that at this point, the kernel determines the memory layout of its code and data structures. At first, the hypervisor determines the kernel base address using the following equation:
In this equation, IDT is the Interrupt Descriptor Table, a table that holds the address of all the interrupt handlers. The processor delivers interrupt zero upon an attempt to divide by zero. In Linux, this interrupt is handled by the divide_error function. denotes the address of the symbol named “name” as reported by the debugging information of the kernel binary.
After determining the kernel’s base address, the hypervisor configures the kSLAT and the uSLAT as presented in
Table 1 and sets the kSLAT to be the active SLAT hierarchy. Pages containing code are marked as readable, executable, but not writable (RX), while other pages are marked non-executable but readable and writable (RW). After determining the kernel’s base address, H-KPP sets RX permissions to its code pages. In addition, H-KPP grants RX permissions to all the firmware code, which is invoked by the kernel through the EFI API.
H-KPP constantly monitors the loading of additional kernel modules and grants RX permissions to their code pages. This is achieved by intercepting the “load_module” function.
3.4. Functional Interpretation
During its execution, H-KPP collects information about the executing environment. This is achieved by intercepting the invocation of specific functions and analyzing their arguments and return values. The interception mechanism (IM) is implemented using software breakpoints. When IM is requested to intercept a function invocation, it replaces the first byte of this function with a breakpoint instruction. It saves the replaced instruction in the hypervisor’s internal storage. In addition, IM configures the CPU to inform it about software breakpoint interrupts.
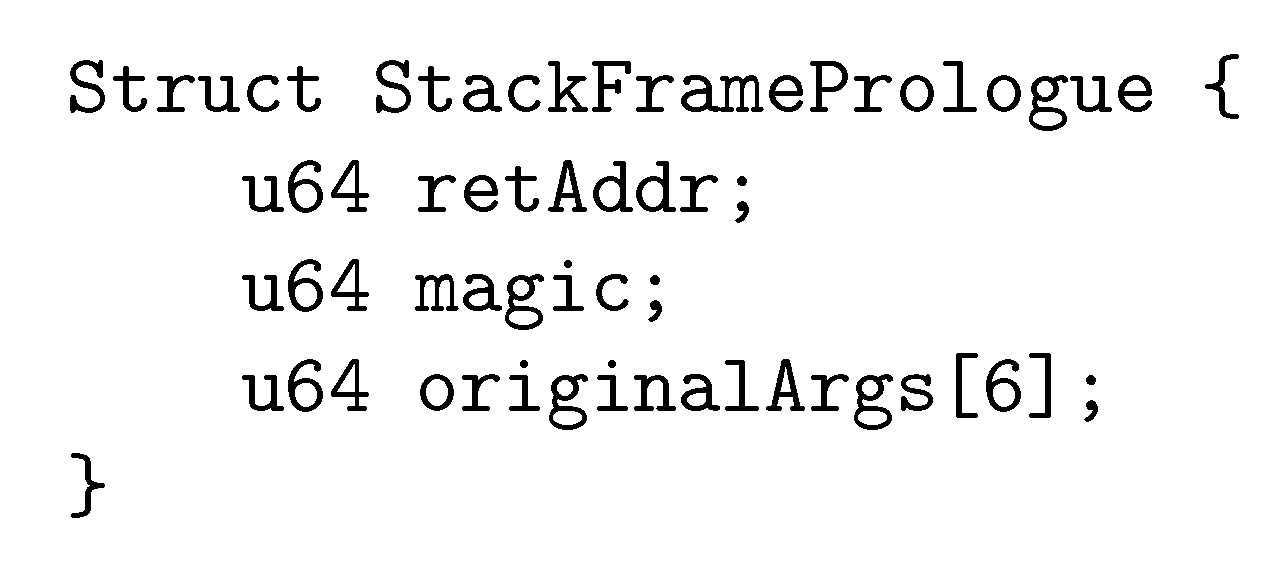
IM reacts to a software breakpoint by emulating the function’s original first instruction. Then, IM pushes onto the stack a special data structure in order to induce an additional software breakpoint interrupt upon the termination of the intercepted function. As
Figure 1 shows, the data structure consists of three fields. The first field is set to the function’s first instruction, the breakpoint instruction. After completing its execution, the function will arrive at the breakpoint instruction, inducing a software breakpoint interrupt and transferring the control to IM. The second field, which is set to the magic number 0 × 1,122,334,455,667,788, allows IM to determine whether the software interrupt was generated due to an entry to the intercepted function or an exit from it. In the first case, IM pushes the special data structure as described. IM pops it and transfers the control to the original return address in the second case. The third field stores the values of the first six arguments passed to the intercepted function, which can be examined on an exit from the function.
We note that IM is not required to include a full emulator for emulation of the first instruction of an intercepted function. In practice, our observations show that the first instruction belongs to the following list: (a) PUSH RBP, (b) CALL IMM32, (c) NOP. Therefore, in our current implementation, IM emulates only these three instructions.
IM notifies the interception requestor upon a function interception by invoking its callback function F. The value returned by F instructs IM to either act normally or deviate from the normal operation, see
Table 2. During the interception of an entry to a function, the normal operation transfers control to the function by emulating its first instruction. A deviation is staying at the breakpoint instruction. During the interception of an exit to a function, the normal operation is returning to the calling function. A deviation is calling the same function again. The usefulness of this non-intuitive behavior is explained below.
3.5. SLAT Switching
H-KPP implements efficient switching between kSLAT and uSLAT upon transitions between kernel-mode and user-mode by utilizing Intel’s VMFUNC instruction. Intel’s virtualization technology (VMX) allows the hypervisor to configure a set of SLAT hierarchies that can be switched from the guest using the VMFUNC instruction without requiring transitions to the hypervisor, thus keeping the overhead at a minimum.
H-KPP injects the VMFUNC instruction using trampolines from four locations in the kernel (see
Table 3): (a) transition to kernel mode due to system call, (b) transition to user mode due to a return from a system call, (c) transition to kernel-mode due to an interrupt, (d) transition to user-mode due to a return from an interrupt. H-KPP inserts a jump instruction to a pre-allocated memory region at each location. In addition, H-KPP generates code that performs VMFUNC, emulates the instruction that was replaced, and jumps back to the original location.
H-KPP allocates the required memory region in the kernel context by intercepting the “module_alloc” function, which is used by the kernel for general memory allocation. Upon the first entry to the “module_alloc” function, H-KPP does nothing and requests IM to proceed to the function. Upon the first exit from the “module_alloc” function, H-KPP stores the function’s return value (the address of the allocated memory region) in an interval variable X and requests the IM to execute the “module_alloc” function again. Upon another entry to the “module_alloc” function, H-KPP changes the value of the “size” argument to match the total size of the SLAT switching code. Upon an exit, H-KPP performs several actions: (a) it modifies the kernel’s page table to grant the newly allocated region with execution rights, (b) it grants this newly allocated page with execution rights in kSLAT, (c) it restores the return value to the value of the internal variable X, (d) it requests IM to disable the interception of the “module_alloc” function.
3.6. Module Loading
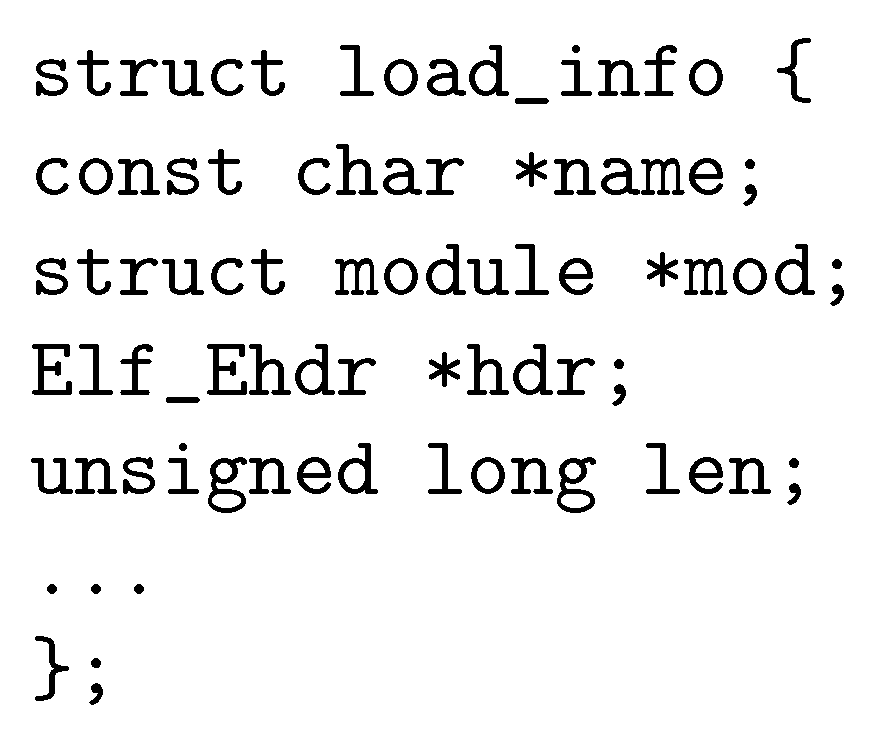
During its initialization, the kernel loads additional executable pages in the form of kernel modules. The kernel’s “load_module” function is responsible for loading new modules. Its first argument contains information about the module to be loaded. In particular, it contains information about the module’s name and a temporary buffer containing the module’s code and data (see
Figure 2). H-KPP intercepts entries to this function and exits from it. On an entry, H-KPP hashes the temporary buffer, page-by-page. If a particular page is paged out, the hypervisor injects a page-fault exception to the guest and requests the IM to stay at the breakpoint instruction. As a result, the operating system handles the page-fault exception by loading the missing page, and the hypervisor gets another opportunity to hash the temporary buffer. After completing the hash computation, the hypervisor verifies that the hash value exists in the pre-calculated database.
On an exit from the “load_module” function, H-KPP looks up the recently loaded module in the linked list of kernel modules pointed by the “modules” global variable. After finding the module in this linked list, H-KPP configures kSLAT to grant execution rights to the module’s code pages. We note that the lookup is performed by the module’s name, which is available through the first argument of the “load_module” function, which IM preserved in the special stack data structure.
3.7. Berkeley Packet Filter
The Berkeley Packet Filter (BPF) [
18] technology allows user-space processes to supply programs for filtering network packets. These programs, compiled to bytecode, are interpreted by the kernel. Alternatively, the bytecodes can be compiled to machine code by a just-in-time compiler embedded in the kernel, thus introducing new executable code.
The simplest solution to the problem of a new unverifiable code is disabling the BPF JIT compiler through the “bpf_jit_enable” variable. However, this change can harm the overall system performance in some cases. Therefore, in its current implementation, H-KPP intercepts the “do_jit” function and configures kSLAT to grant execution rights to the newly generated code pages.
4. Kernel Objects Protection
H-KPP detects the modification of three types of kernel object fields. The first type includes static objects, like the interrupt vector and the system-call table. Because the content of these static objects does not change during the execution of the operating system, H-KPP computes the hash of these objects after their initialization and then verifies their integrity by periodically comparing their hash results with the precomputed value. H-KPP uses SHA-1 as its hashing algorithm.
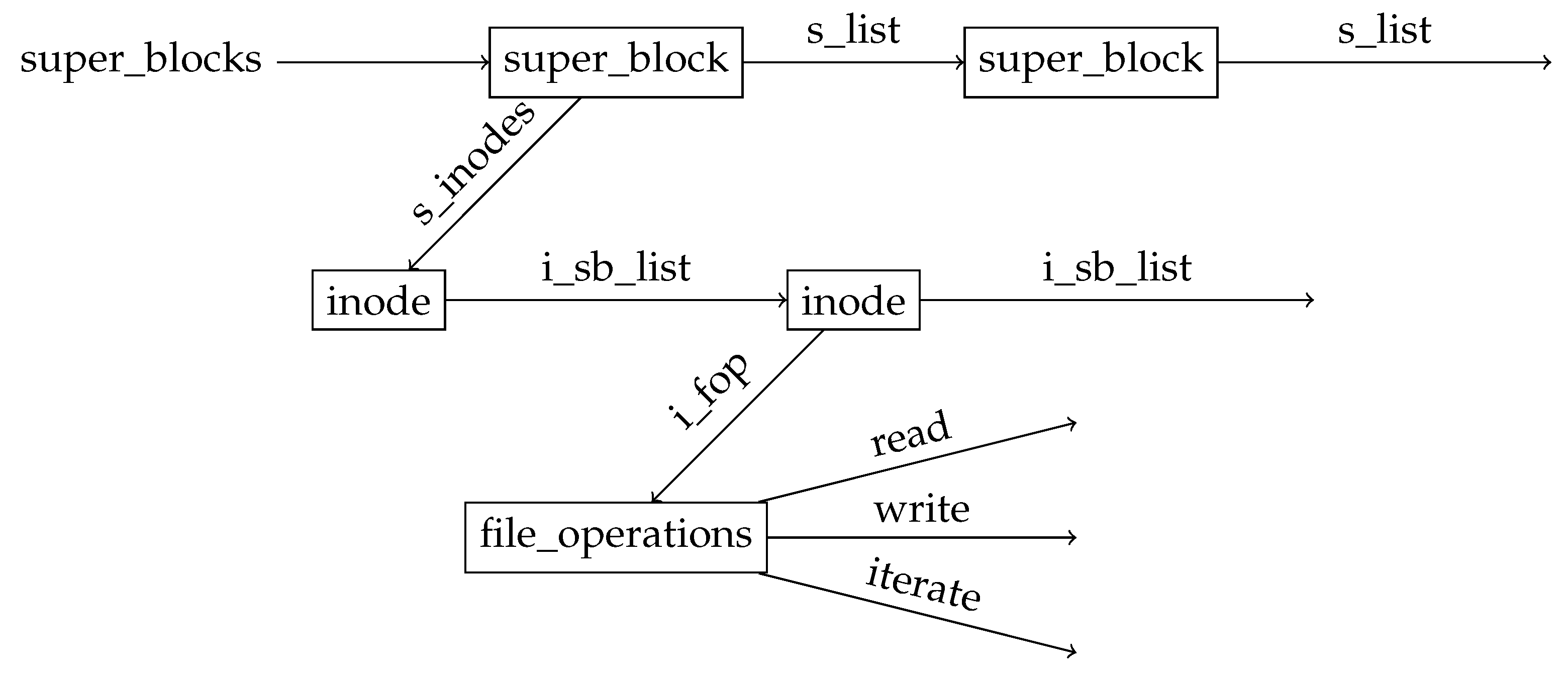
The second type includes function pointers of various objects, like the
i_fop field of the
inode object (see
Figure 3). These pointers may be assigned different values depending on the loaded modules. For example, each file system can define a new set of functions pointed by the
i_fop field. Therefore, H-KPP limits its verification procedure to checking that the
i_fop field points to a module’s variable and that each field of this variable points to the beginning of some function. The verification itself is performed periodically by traversing the object graph as depicted in
Figure 3. More precisely, H-KPP traverses the inodes and constructs a set of all the objects pointed by the
i_fop field. Then, H-KPP verifies that the fields of these objects point to functions. If so, H-KPP stores a pair consisting of an object address and its hash in H-KPP’s internal data structure. In the future, instead of verifying each field of an object separately, H-KPP hashes it and compares its hash to the previously stored value.
The third type includes fields whose values are subject to certain invariants. For example, no two task_struct objects should reference the same credentials object via their cred fields. H-KPP performs this verification by traversing the list of processes and storing the addresses stored in the cred fields in an array. Then, H-KPP sorts the array and verifies that consecutive items are different.
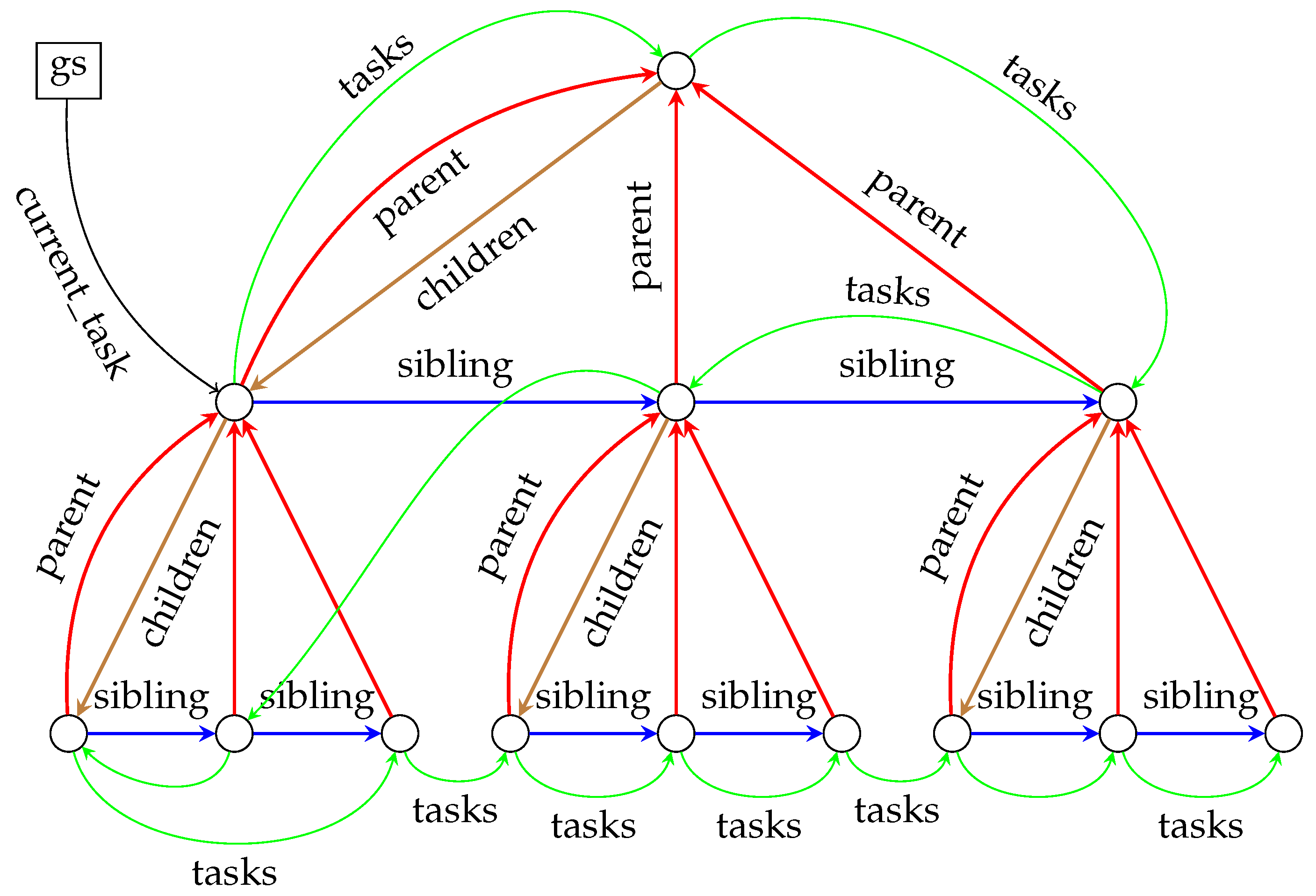
Another example is the equality invariant over the sets of
task_struct objects. As depicted in
Figure 4, the set of active processes can be constructed using information from two sources: (1) the linked list formed by the
tasks field of the
task_struct, (2) the tree formed by the
children and the
sibling fields of the
task_struct. H-KPP periodically tests the sets of task_struct objects obtained from these sources. For each source, H-KPP stores the addresses of the structures in an array. Then, the arrays are sorted and compared.
The verification procedure relies on the kernel symbols and the register values for locating and traversing the object graph. H-KPP intercepts the assignment to the
LSTAR register, which signifies the completion of the kernel’s initialization. At this point, H-KPP configures the VMX_PREEMPTION_TIMER, which induces periodic transitions to the hypervisor, thus allowing H-KPP to perform the periodic verification of the kernel objects.
Table 4 summarizes the performed verifications.
5. Results
5.1. Effectiveness
This section evaluates the effectiveness and the performance of H-KPP. In order to assess the effectiveness of H-KPP, we have developed a kernel module that mimics some aspects of the malicious behavior of various attacks. It may seem more natural to run an actual attack; unfortunately, the attacks we have found target older versions of the Linux kernel.
Our kernel module performs a sequence of operations that H-KPP should recognize as malicious. To demonstrate a successful recognition, we performed the following steps for each operation:
Regarding the last step, we note that the hypervisor outputs its log messages to the serial port in our current implementation, where these messages can be observed. We chose this communication channel only due to its simplicity. If needed, other communication channels, like Ethernet or USB, can be implemented. The following list summarizes the operations implemented by our kernel module.
The 1st operation demonstrates code injection, as performed by multiple attacks. While injecting a new code to various memory regions is possible, our kernel module demonstrates an injection to the stack. Then, the kernel module jumps to the injected code. The hypervisor reacts to the execution of unfamiliar code by writing a message to its log and resetting the system.
The 2nd and the 3rd operations demonstrate patching of the interrupt descriptor table (IDT) and the system call table, as performed by rootkit [
19]. Specifically, the kernel module patches the keyboard interrupt entry of the IDT, thus allowing it to act as a keylogger. In the system call table, the kernel module patches the
getdents system call, which allows it to hide files. The hypervisor reacts to both of these patches by writing a message to the log.
The 4th and the 5th operations demonstrate patching of the /proc inode’s inode.f_op.read field and the patching of the tcp4_seq_ops.show field, which can enable an attacker to hide processes and network connections. In both cases, the hypervisor writes a log message.
The 6th operation demonstartes unlinking a given process from the process list, thus enabling an attacker to hide a process, even from the kernel itself. The hypervisor detects this attack using information from other sources and writes a log message.
The last operation demonstrates a privilege escalation attack by copying the credentials of a privileged process. Specifically, this operation alters the task_struct.cred field. The hypervisor recognizes that a particular credentials structure is referenced more than once and writes a log message.
5.2. Code Integrity Component Performance
In order to assess the performance of H-KPP, we have installed it in a virtualized environment running Ubuntu 20.
Table 5 presents the exact specification of the testbed environment. We used the Phoronix Test Suite (PTS) as a benchmarking tool. The PTS includes multiples programs that test various aspects of the system performance. We have selected a subset of these tests for inclusion in our performance analysis.
Table 6 describes the selected tests.
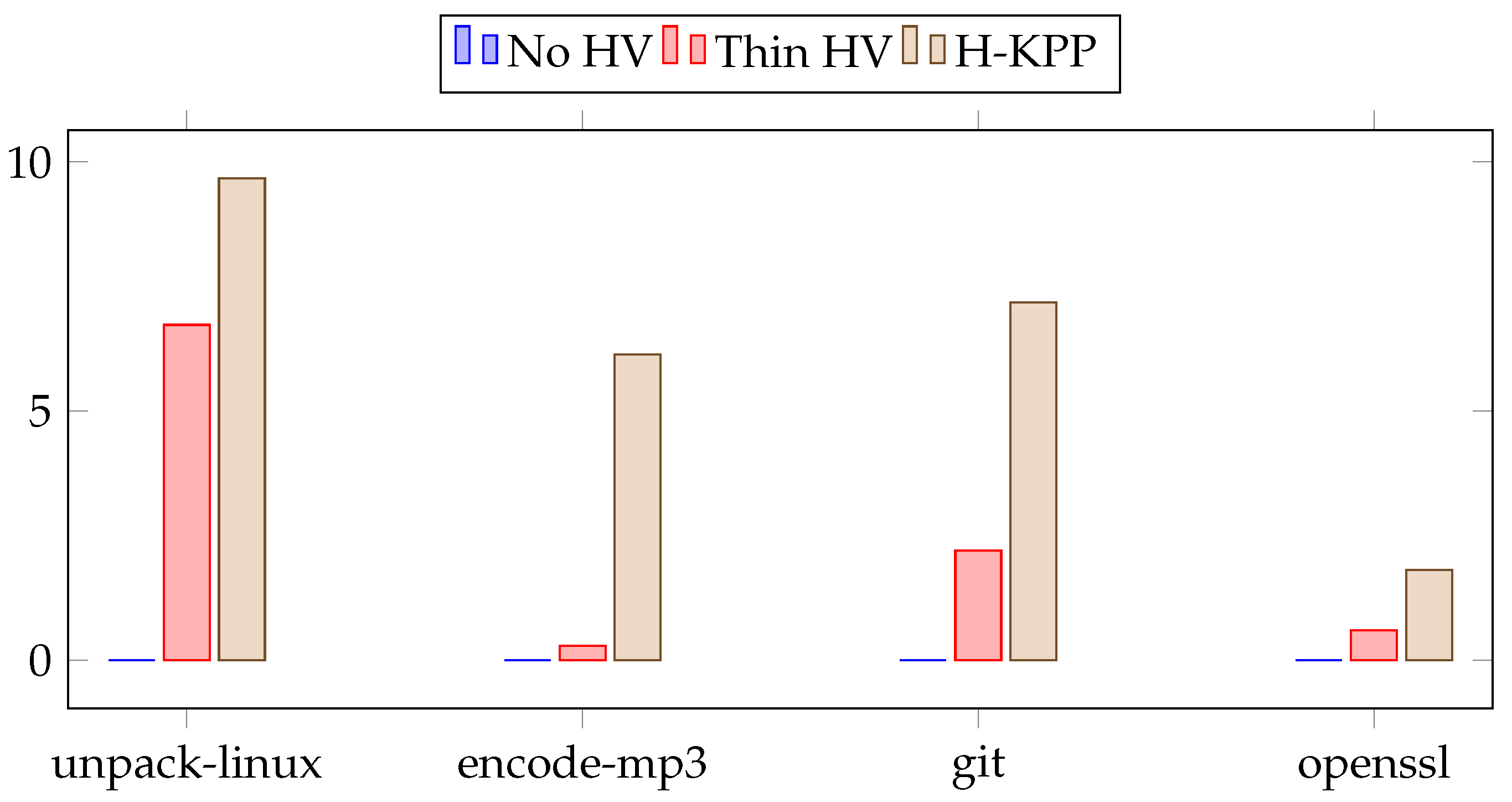
Each test was executed in three configurations: without a hypervisor (“No HV”), with a hypervisor that does nothing (“Thin HV”), with H-KPP. Each test was executed several times, and the PTS displayed the average on the screen. Since the units of measurement are different for each test, in order to achieve uniformity, we display the result in percentages compared to the “No HV” configuration.
In
Figure 5, we can see that the average overhead of the “Thin HV” configuration is 2.5%, and the average overhead of the “H-KPP” configuration is 6.2%. In contrast, the performance of a full hypervisor, like VirtualBox is above 38% [
20].
5.3. DKOM Component Performance
In addition to its code integrity, H-KPP recognizes kernel object modification by performing periodic verification procedures. In this section, we analyze the performance of each verification procedure in terms of the object graph size. We measured the difference between the timestamps at the beginning and the end of each procedure’s execution. Then, depending on the procedure, we divided the result by the number of traversed objects. A potential operator of our system can achieve acceptable performance degradation by configuring the verification period according to the expected number of objects and the time required to verify each object.
Table 7 summarizes our results.
6. Related Work
The main goal of hardware-assisted virtualization is the execution of multiple operating systems on a single hardware, as demonstrated by VirtualBox [
21], VMware Workstation [
22], Xen [
23]. However, since its first introduction more than a decade ago, it has also been used for the construction of secure applications.
The applications cover a wide range of security areas. For example, Nitro [
24], and its extension DRAKVUF [
25], are Xen-based hypervisors for system call interception. They work by intercepting the system call mechanism of the x86 architecture, thus providing an OS-independent framework for virtual machine introspection (VMI). In particular, DRAKVUF introduces the notion of a stealth breakpoint for the interception of kernel functions. H-KPP uses a similar approach for intercepting the
do_jit function, for example.
Another example is SBCFI [
26]. SBCFI is a Xen-based hypervisor that provides control flow integrity verification for the underlying operating system. Currently, H-KPP does not include control flow hijacking countermeasures. However, it can be extended along the lines of SBCFI. Moreover, in theory, H-KPP’s performance should be better due to its minimalistic design.
BitVisor [
9] is a thin hypervisor that intercepts access to ATA hard disks to enforce storage encryption. A thin hypervisor is a preferred solution for security applications due to its low overhead compared to a full hypervisor. Like BitVisor, H-KPP is based on a thin hypervisor but provides different security services, namely protecting the kernel’s code and data.
SecVisor [
27] is another thin hypervisor that uses a secondary-level address translation (SLAT) and IOMMU to prevent unauthorized code execution in kernel mode. H-KPP is similar to SecVisor in its secondary-level address translation tables configuration. H-KPP differs from SecVisor in three aspects. Firstly, H-KPP introduces a new approach for rapid switching between two SLAT configurations, using code injection and the special
VMFUNC instruction. This approach significantly improves the system performance. While it is difficult to make a direct comparison, we can see that SecVisor’s performance in all the test cases was worse than Xen’s, a full hypervisor. In contrast, H-KPP’s performance is much better than VirtualBox’s, which is also a full hypervisor. Secondly, unlike SecVisor, H-KPP can handle just-in-time generated code of BPFs. Thirdly, H-KPP protects the kernel’s data structures and kernel’s code protection.
Leon et al. [
28] proposed a system that prevents the execution of unauthorized code in user mode. This system is also based on a thin hypervisor. Unlike H-KPP, the system proposed by Leon et al. targets user mode applications and therefore makes unrealistic assumptions about the kernel mode execution. In particular, it assumes that the kernel modules are compiled statically into the kernel and that the BPF mechanism is disabled. However, the ideas presented by Leon et al. can be integrated into H-KPP, thus allowing it to protect the execution of user mode applications and the kernel. Resh et al. [
29] proposed a similar system for the Windows OS.
PrivGuard [
30] is a lightweight system for protecting kernel objects. PrivGuard is based on stack canaries and object duplication verifications performed during system calls. H-KPP is similar to PrivGuard in its protection of the
task_struct.cred field. Unlike PrivGuard, H-KPP’s protection cannot be circumvented by an attacker with kernel-mode privileges. In addition, H-KPP does not introduce any modifications to the kernel.
DLP-Visor [
20] is a hypervisor-based system that attempts to prevent leakage of personal data by blocking the execution of certain system calls. DLP-Visor analyzes the system call execution at the level of the kernel itself. DLP-Visor’s approach to limiting kernel object modification is based on access rights of user-mode application. Unlike DLP-Visor, H-KPP limits only direct modification of kernel object; all indirect modifications are allowed.
Volatility [
8] is an offline tool for forensic investigation of memory snapshots. Obtaining a memory snapshot is not an easy task. ForenVisor [
31], HyperSleuth [
32] are two hypervisors that are capable of performing precise memory acquisition. Kiperberg et al. [
33] described an adaptation of these ideas to modern operating systems.
Volatility includes multiple verification mechanisms intended to recognize malicious actions that were captured in the memory snapshot. H-KPP’s kernel object verification procedure follows the lines of Volatility. Unlike Volatility, H-KPP can recognize an attack while it is being conducted.
Wang, Wu, and Liu proposed iCruiser [
34] to protect link-based data structures of the kernel. iCruiser uses a special canary embedded in the linked objects to verify the integrity of the links. iCruiser requires recompilation of the kernel. In contrast, H-KPP’s verification is not limited to link-based data structures and does not require kernel recompilation.
Srivastava, Erete, and Giffin proposed [
35] to use a hypervisor to protect variables and structure fields from malicious modification. While the approach of the described system is more general than H-KPP’s, to keep an acceptable performance degradation, the authors propose to partition the memory of kernel objects into protected and non-protected halves. This partition, obviously, requires kernel recompilation.
Graziano et al. [
36] described a so-called “evolutionary” attack method on kernel objects that could not be recognized by traditional means. As an example of the attack’s applicability, the authors could prevent the execution of a particular process without removing it from the process list. Graziano et al. described a hypervisor-based system that could be used to detect such attacks. While the current implementation of H-KPP is vulnerable to evolutionary attacks, it can be augmented with the simulator described by Graziano et al.
HUKO [
37] introduces the notion of “subject-aware protection”. HUKO defines three subjects: the kernel, a trusted kernel module, an untrusted kernel module. The kernel is permitted to perform any operation on a kernel object. Trusted kernel modules are permitted to perform only some operations. Untrusted kernel modules are permitted to perform only a tiny subset of operations. HUKO’s object labeling mechanism relies on information delivered to it from the modified Linux kernel. H-KPP is similar to HUKO in that they both utilize a separate SLAT for each environment. Unlike H-KPP, HUKO is based on Xen, a full hypervisor. As a result, the HUKO’s performance is not better than the performance of Xen.
7. Conclusions
We have described a hypervisor-based system for protecting kernel code and data. While the idea of protecting kernel code using a hypervisor is not new, H-KPP adapts this idea to new operating system facilities, like BPF. In addition, we have presented a novel approach for SLAT switching, which is based on code injected performed by the hypervisor. This SLAT switching approach allows the system to remain efficient and secure simultaneously. Unlike other solutions, H-KPP is based on a thin hypervisor. As a result, H-KPP has a negligible performance overhead making it applicable in real-world scenarios.
In addition, unlike some previously described systems, H-KPP does not require any modifications of the underlying kernel. However, if such modifications are possible, more general and precise protection can be achieved using object partitioning [
35].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}