
Multi-Sensor Optimal Motion Planning for Radiological Contamination Surveys by Using Prediction-Difference Maps


Abstract
:1. Introduction
2. Simulations of Radiation Contamination Using MCNP 6.2
3. Gaussian Process Regression Model for Radiation Contamination Mapping
3.1. GPR Implementation in Python
3.2. K-Fold Cross-Validation Test
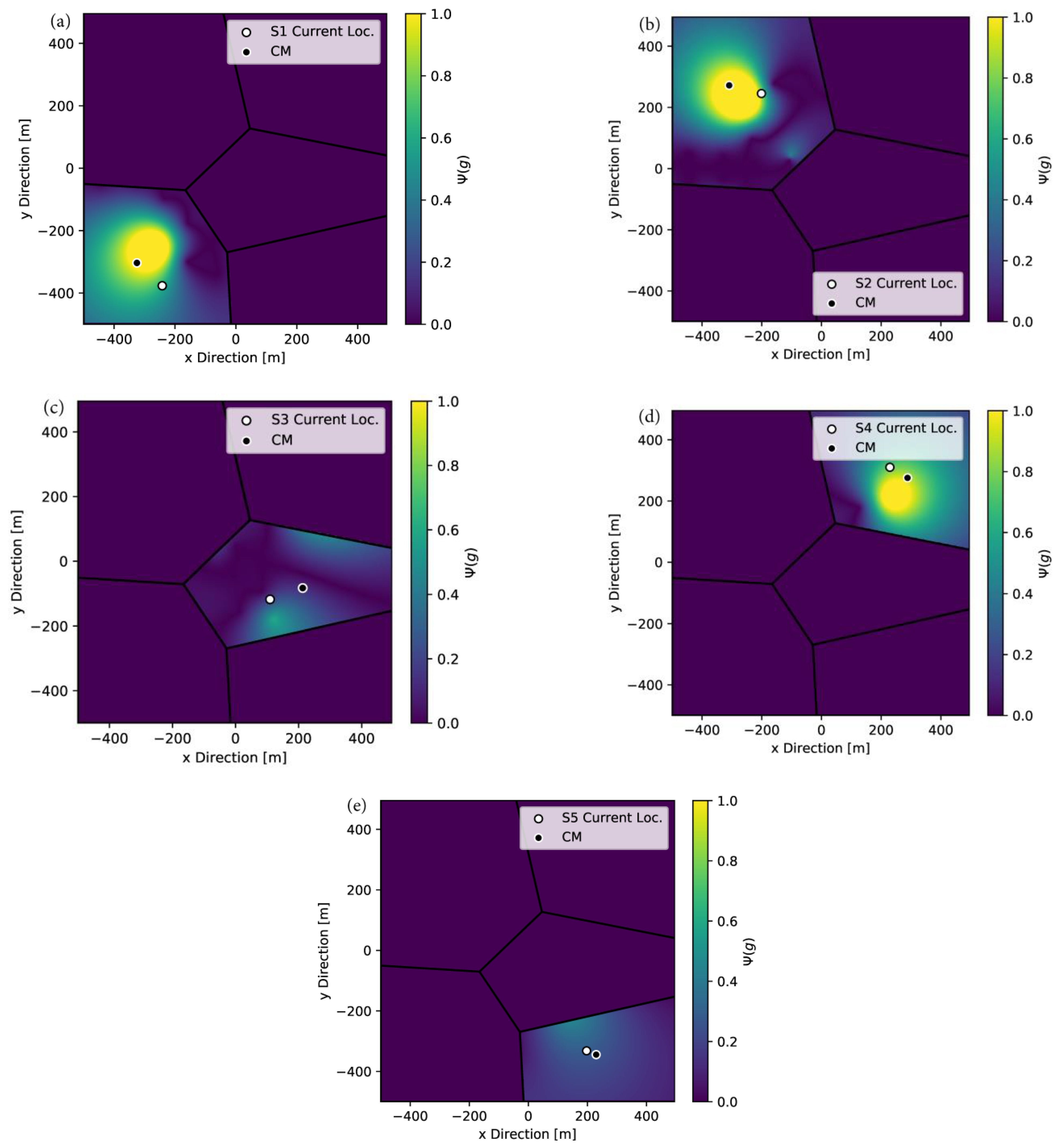
4. Optimal Motion Planning Using Voronoi Partitions and Prediction Difference Maps
| Algorithm 1. Recursive Motion Planning |
| 1. Initialize: |
| 2. Predict: with |
| 3. |
| 4. Optimize: |
| 5. While not converged: |
| 6. Calculate: |
| 7. For n in N sensors do |
| 8. Compute: |
| 9. , for all |
| 10. |
| 11. |
| 12. |
| 13. |
| 14. |
| 15. For |
| 16. Append: |
| 17. |
| 18. Predict: with |
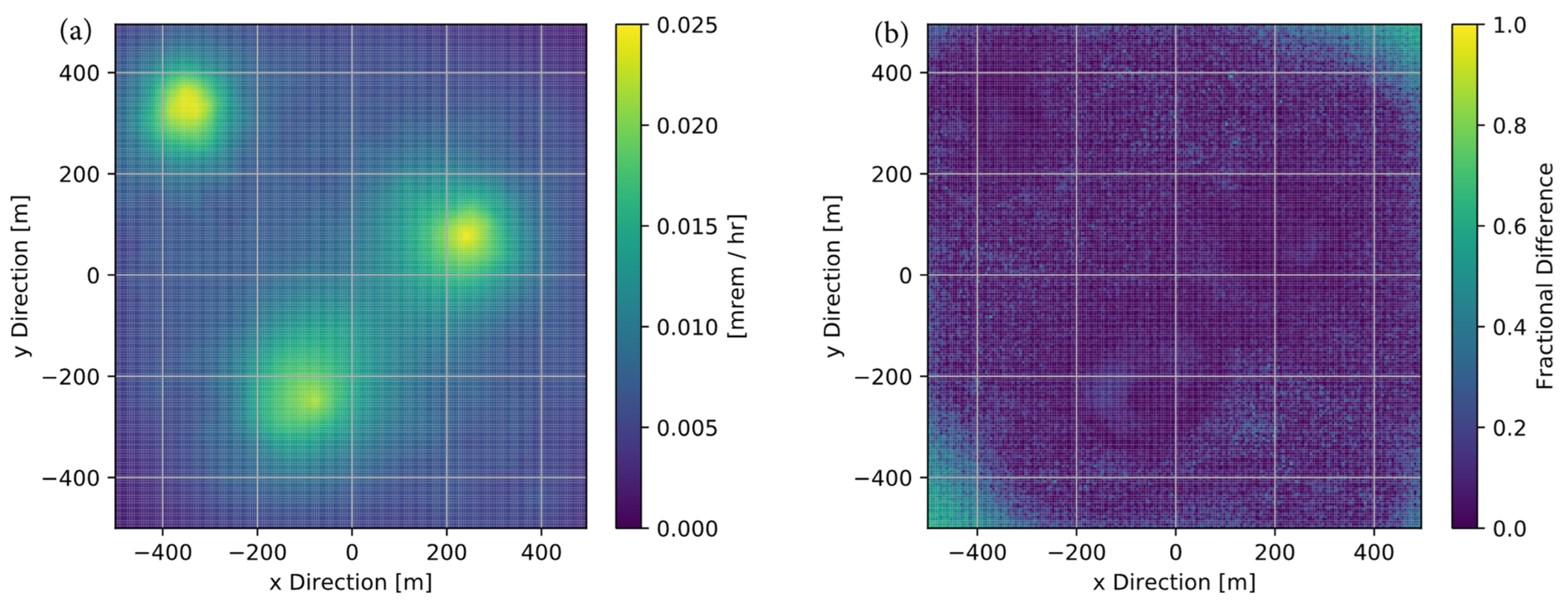
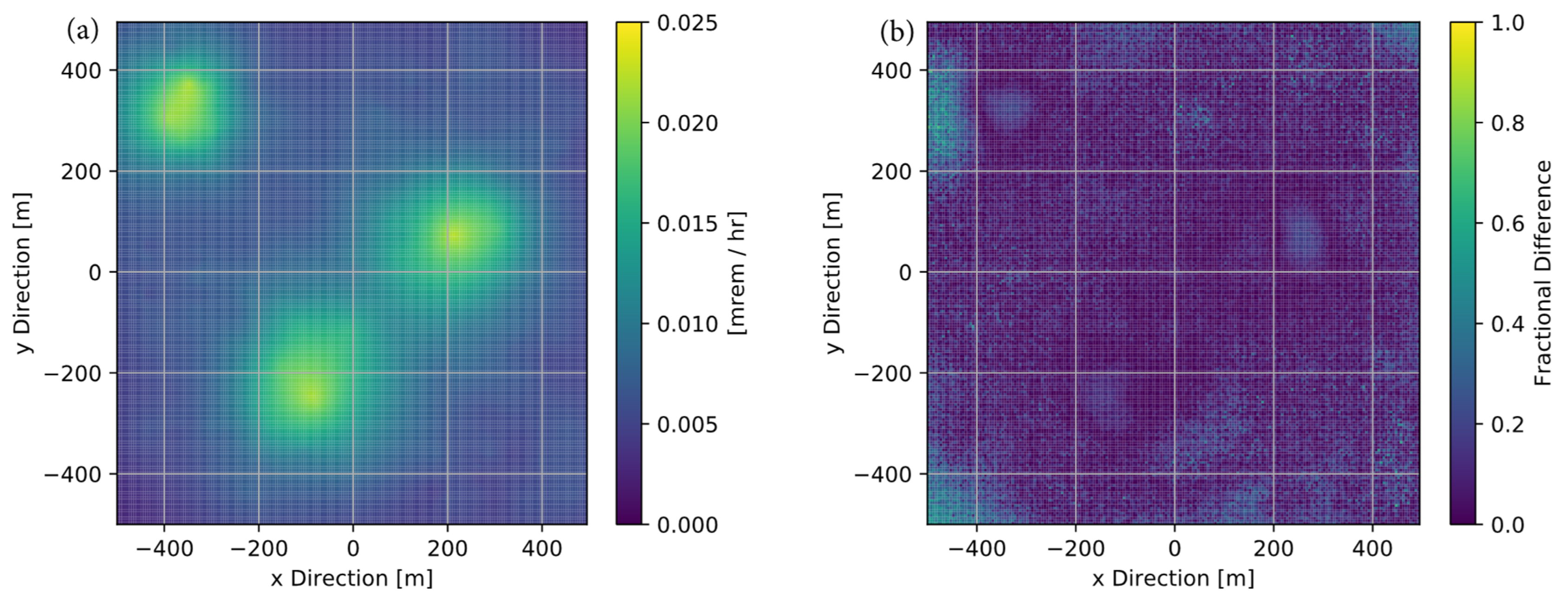
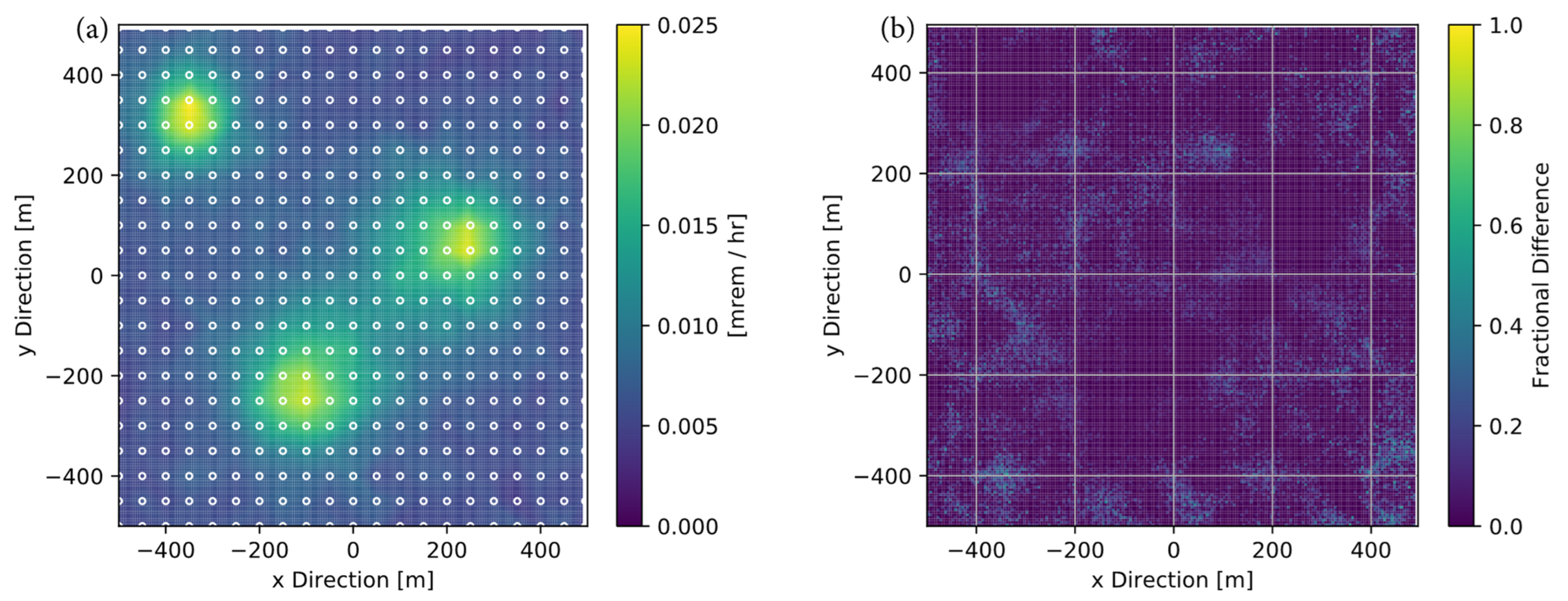
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of legacy uranium mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Connor, D.; Martin, P.G.; Scott, T.B. Airborne radiation mapping: Overview and application of current and future aerial systems. Int. J. Remote Sens. 2016, 37, 5953–5987. [Google Scholar] [CrossRef]
- Sanada, Y.; Torii, T. Aerial radiation monitoring around the Fukushima Dai-ichi nuclear power plant using an unmanned helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Shimazoe, K.; Nakamura, Y.; Takahashi, H.; Shikaze, Y.; Nishizawa, Y.; Yoshida, M.; Sanada, Y.; Torii, T.; Yoshino, M.; et al. A prototype of aerial radiation monitoring system using an unmanned helicopter mounting a GAGG scintillator Compton camera. J. Nucl. Sci. Technol. 2016, 53, 1067–1075. [Google Scholar] [CrossRef]
- Pollanen, R.; Toivonen, H.; Perajarvi, K.; Karhunen, T.; Ilander, T.; Lehtinen, J.; Rintala, K.; Katajainen, T.; Niemala, J.; Juusela, M. Radiation Surveillance using an unmanned aerial vehicle. Appl. Radiat. Isot. 2009, 67, 340–344. [Google Scholar] [CrossRef] [PubMed]
- Martin, P.; Kwong, S.; Smith, N.; Yamashiki, Y.; Payton, O.; Russell-Pavier, F.; Fardoulis, J.; Richards, D.; Scott, T. 3D unmanned aerial vehicle radiation mapping for assessing contaminant distribution and mobility. Int. J. Appl. Earth Obs. Geoinf. ITC J. 2016, 52, 12–19. [Google Scholar] [CrossRef]
- Towler, J.; Krawiec, B.; Kochersberger, K. Terrain and Radiation Mapping in Post-Disaster Environments Using an Autono-mous Helicopter. Remote Sens. 2012, 4, 1995–2015. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Chen, Y. Multiple UAV Formations for Cooperative Source Seeking and Contour mapping of a Radiative Signal Field. J. Intell. Robot. Syst. 2014, 74, 323–332. [Google Scholar] [CrossRef]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field. J. Intell. Robot. Syst. 2012, 70, 401–410. [Google Scholar] [CrossRef]
- Kurvinen, K.; Smolander, P.; Pöllänen, R.; Kuukankorpi, S.; Kettunen, M.; Lyytinen, J. Design of a radiation surveillance unit for an unmanned aerial vehicle. J. Environ. Radioact. 2005, 81, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Boudergui, K.; Carrel, F.; Domenech, T.; Guenard, N.; Poli, J.P.; Ravet, A.; Schoepff, V.; Woo, R. Development of a Drone Equipped with Optimized Sensors for Nuclear and Radiological Risk Characterization. In Proceedings of the 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and their Applications, Ghent, Belgium, 6–9 June 2011. [Google Scholar]
- Martinez, S.; Cortes, J.; Bullo, F. Obtaining Global Behavior from Local Interaction. IEEE Control Syst. 2007, 27, 75–88. [Google Scholar]
- Cortes, J.; Martinez, S.; Karatas, T.; Bullo, F. Coverage Control for Mobile Sensing Networks. IEEE Trans-Actions Robot. Autom. 2004, 20, 243–255. [Google Scholar] [CrossRef]
- Cortés, J.; Martínez, S.; Bullo, F. Spatially-distributed coverage optimization and control with limited-range interactions. ESAIM: Control. Optim. Calc. Var. 2005, 11, 691–719. [Google Scholar] [CrossRef] [Green Version]
- Du, Q.; Faber, V.; Gunzburger, M. Centroidal Voronoi Tessellations: Applications and Algorithms. SIAM Rev. 1999, 41, 637–676. [Google Scholar] [CrossRef] [Green Version]
- Gu, D.; Hu, H. Spatial Gaussian Process Regression with Mobile Sensor Networks. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1279–1290. [Google Scholar] [CrossRef] [PubMed]
- Carron, A.; Todescato, M.; Carli, R.; Schenato, L.; Pillonetto, G. Multi-agents adaptive estimation and coverage control using Gaussian regression. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 2490–2495. [Google Scholar] [CrossRef] [Green Version]
- Luo, W.; Sycara, K. Adaptive Sampling and Online Learning in Multi-Robot Sensor Coverage with Mixture of Gaussian Processes. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6359–6364. [Google Scholar] [CrossRef]
- Luo, W.; Nam, C.; Kantor, G.; Sycara, K. Distributed environmental modeling and adaptive sample for multi-robot sensor coverage. In Proceedings of the 18th International Conference on Autonomous Agents and Multiagent Systems, Montreal, QC, Canada, 13–17 May 2019; pp. 1488–1496. [Google Scholar]
- Werner, C.J.; Bull, J.S.; Solomon, C.J.; Brown, F.B.; McKinney, G.W.; Rising, M.E.; Dixon, D.A.; Martz, R.L.; Hughes, H.G.; Cox, L.J.; et al. MCNP6. 2 Release Notes; Report LA-UR-18–20808; Los Alamos National Laboratory: Los Alamos, NM, USA, 2018.
- McConn, R.J., Jr.; Gesh, C.J.; Pagh, R.T.; Rucker, R.A.; Williams, G.R., III. Compendium of Material Composition Data for Radiation Transport Modeling; PIET-43741-TM-963, PNNL-15870 Rev. 1; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2011.
- Almlie, J.C. NORM Primer Industry Edition; University of North Dakota Energy & Environment Research Center: Grand Forks, ND, USA, 2014; Available online: https://undeerc.org/bakken/optimization/Articles/NORM_Primer_Industry_Edition.pdf (accessed on 1 March 2020).
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2008; ISBN 026218253X. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z. Reconstruction of Urban Radiation Landscape using Machine Learning Methods. Ph.D. Dissertation, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2019. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; del, M.B.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Morales, J.L.; Nocedal, J. Remark on algorithm 778: L-BFGS-B: Fortran subroutines for large-scale bound constrained optimization. ACM Trans. Math. Softw. 2011, 38, 1–4. [Google Scholar] [CrossRef]
- Hussein, I.I.; Stipanovic, D.M. Effective Coverage Control for Mobile Sensor Networks with Guaranteed Collision Avoidance. IEEE Trans. Control Syst. Technol. 2007, 15, 642–657. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Technique | Autonomy | Advantages | Limitations |
|---|---|---|---|
| Uniform survey | Possible through pre-planned motion paths | Well-established standard approach | Takes considerably more time to survey large areas |
| Non-uniform survey | Typically controlled by human operator | Increased accuracy/precision in area of interest | Dependent on human operations |
| Multi-sensor uniform survey | Possible through pre-planned motion paths | Decrease in survey time compared to single-sensor survey | Prone to complexities in motion path planning |
| Multi-sensor non-uniform survey | Typically controlled by human operator | Improved coverage in area of interest compared to single-sensor survey | Requires multiple human operators |
| Kernel | Radial Basis Function | Rational Quadratic | Matérn | Matérn | Matérn |
|---|---|---|---|---|---|
| Functional Form R(r) | |||||
| Fold 1 | 0.118 | 0.057 | 0.052 | 0.060 | 0.069 |
| Fold 2 | 0.133 | 0.057 | 0.051 | 0.061 | 0.071 |
| Fold 3 | 0.131 | 0.053 | 0.048 | 0.060 | 0.070 |
| Fold 4 | 0.121 | 0.056 | 0.051 | 0.062 | 0.072 |
| Fold 5 | 0.141 | 0.055 | 0.052 | 0.062 | 0.074 |
| Average | 0.129 | 0.056 | 0.051 | 0.061 | 0.071 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, T.H.; Wakeford, D.T.; Nowicki, S.F. Multi-Sensor Optimal Motion Planning for Radiological Contamination Surveys by Using Prediction-Difference Maps. Appl. Sci. 2022, 12, 5627. https://doi.org/10.3390/app12115627
Shin TH, Wakeford DT, Nowicki SF. Multi-Sensor Optimal Motion Planning for Radiological Contamination Surveys by Using Prediction-Difference Maps. Applied Sciences. 2022; 12(11):5627. https://doi.org/10.3390/app12115627
Chicago/Turabian StyleShin, Tony H., Daniel T. Wakeford, and Suzanne F. Nowicki. 2022. "Multi-Sensor Optimal Motion Planning for Radiological Contamination Surveys by Using Prediction-Difference Maps" Applied Sciences 12, no. 11: 5627. https://doi.org/10.3390/app12115627
APA StyleShin, T. H., Wakeford, D. T., & Nowicki, S. F. (2022). Multi-Sensor Optimal Motion Planning for Radiological Contamination Surveys by Using Prediction-Difference Maps. Applied Sciences, 12(11), 5627. https://doi.org/10.3390/app12115627