1. Introduction
Unmanned aircraft systems (UAS) continue to prove their utility in the performance of both missions that were once conducted by manned platforms and those that are entirely novel altogether. In the United States, the current regulatory environment permits the commercial operation of unmanned vehicles weighing less than 55 pounds in the National Airspace System (NAS). Services such as pipeline patrol, communication relay, surveillance, and surveying for agricultural and security purposes are offered for hire by businesses utilizing this rule-set. For-profit entities and the public continue to demand services via UAS. The Federal Aviation Administration (FAA), the regulator in the United States, has been responsive to the demand, as evidenced by recent expansion of the existing Part 107 rules to allow for limited operations over people and nighttime flights. The economic value of expanding UAS operations has been recognized by the agency, including the generation of a road map to expand operations, such as beyond visual line-of-sight flights based on the risk on a risk-management framework proposed under the upcoming Modernization of Special Airworthiness Certificates (MOSAIC) rule-set.
As UAS operations expand and businesses are growing to meet customer demand, the need to optimize mission performance becomes paramount to efficiently and profitably provide services. Propulsion system optimization is among the many areas a designer considers. Group 2 UAS are based on medium-sized unmanned aerial vehicles (UAVs), with 21–55 lbs maximum take-off weight and flying lower than a 3500-foot operational ceiling and under 250 knots cruise airspeed, according to the US Department of Defense. Among Group 2 UAS, common power plants include low-cost electric motors and internal combustion engines. These devices convert stored energy to propulsion with a simple fixed-pitch propeller, as weight and cost constraints most often preclude the use of variable-pitch propeller options. The use of fixed-pitch propellers requires a compromise between climb and cruise performance. Thus, accurately understanding propeller performance is an important factor contributing to the operating envelope and mission capability of the vehicle.
Early in the design cycle for a new platform, performance estimates are developed using low-order models to take advantage of the ability to perform rapid design iterations and mission performance evaluations. As the design matures, an increase in fidelity of the estimates is desired. Commonly, models such as Blade Element Momentum Theory (BEMT) are applied in early design stages to predict propeller performance. However, BEMT models are subject to limitations, particularly at low Reynolds numbers and low advance ratios [
1]. Researchers have demonstrated the ability to accurately predict propeller performance using computational fluid dynamics (CFD), even in difficult-to-resolve flow conditions [
2,
3]. Although such examples commendably replicate performance characteristics based on available data, CFD practitioners still require validation of their modeling results. Besides its use as a validation tool, experimental propeller characterization remains a viable option, especially for the UAS community, due to the smaller wind tunnel facility requirements compared to full-scale aircraft propeller testing.
There is an ever-growing body of knowledge from wind tunnel experiments using different configurations to assess propeller performance; however, there does not appear to be a unifying method to ensure that the different configurations are valid. Czyz et al., 2022, studied the aerodynamic performance of propellers with various pitch in a wind tunnel for electric propulsion applications [
4]. Podsedkowski et al., 2020, conducted experimental tests of variable pitch propellers for UAVs [
5], the study involved a propeller of 16 inches in diameter and various pitch. Podsedkowski et al. designed and built a measuring station that operated similarly to a propeller dynamometer. Avanzini et al., 2020, developed a test bench for measuring propeller aerodynamic performance and electrical parameters; this involved using measurements of thrust, torque, and electric power to validate models used for preliminary designs of UAVs [
6]. Islami and Hartono, 2019, developed a small propeller test bench system; this study involved the use of a rig with loads cells to measure thrust and torque for small propellers (10 inches in diameter) [
3]. Experimental measurements were compared to results obtained from CFD and BEMT [
3]. These studies [
3,
4,
5,
6,
7,
8] have formed a basis of knowledge useful to Group 2 UAS; however, they do not specifically address a method for validating a wind tunnel dynamometer, which is essential for credible experimental results. There are many potential sources of experimental artifacts that can affect data and yet not be manifest from an uncertainty analysis. For example, the presence of fluid–structure interaction between the propeller, motor, instrumentation and support structure can influence results in a way that does not effect bias (systematic) or precision (random) error. This current paper proposes a novel method to be adopted as common practice for validating such wind tunnel dynamometers.
1.1. Previous Dynamometer Work
There are many existing wind tunnel propeller dynamometers, which can generally be categorized by scale and configuration. Small-scale dynamometers are typically used to evaluate propellers with up to about 10-inch diameter, and include those at the University of Illinois at Urbana–Champaign (UIUC) and Ohio State University ([
9,
10,
11,
12,
13,
14]). Brandt and Selig ([
9,
10]) and Deters et al. ([
11,
12]) noted the effect of low-Reynolds-number operation on such propellers from a wind tunnel propeller dynamometer, and Dantsker et al. ([
13]) reported the performance of small folding propellers. McCrink and Gregory ([
14]) compared blade element momentum (BEM) modeling results with wind tunnel experimental data for small propellers operating at low Reynolds numbers. Van Trueren et al. ([
15]) evaluated small UAS propellers designed for minimum induced drag using a wind tunnel propeller dynamometer at the United States Air Force Academy. Gamble and Arena ([
16]) described automatic dynamic propeller testing at low Reynolds numbers and designed a dynamometer. Bellcock and Rouser ([
17]) described the design of a wind tunnel propeller dynamometer at Oklahoma State University (OSU) for evaluating a jet-blowing flow controller on small propellers to suppress boundary layer separation.
Figure 1 shows the previous OSU wind tunnel propeller dynamometer design described by Bellcock and Rouser to evaluate a modified 10-inch diameter electric propeller. Morris ([
18]) presented a method for validating a mobile propeller dynamometer for UAS applications; however, there has not otherwise been previous work on a method to validate a wind tunnel propeller dynamometer for Group 2 UAS applications.
Examples of large wind tunnel propeller dynamometers are typically found in government and industry. Boldman et al. ([
19]) described a dynamometer used in the United Technologies Technology Research Center: a 10 ft by 15 ft large subsonic wind tunnel used to evaluate an advanced ducted propeller. National Aeronautics and Space Administration (NASA) facilities have been previous described, including a 2000 hp dynamometer at NASA Langley used in a 16 ft, high-speed wind tunnel ([
20]), shown in
Figure 2, and a 1000 hp dynamometer at NASA Ames used in a 12 ft wind tunnel ([
21]), shown in
Figure 3. The propeller diameters used in these NASA facilities range from 4 ft to 10 ft and are roughly one half to one third of the test section size. Further, the propellers are located between one half to two diameters ahead of the vertical strut. In order to collect credible propeller performance data, it is important for wind tunnel dynamometers to be designed to reduce fluid–structure interaction between the propeller flow-field and the wind tunnel test section and dynamometer vertical support.
Dynamometer configurations generally can be classified by the means by which they measure thrust and torque. Thrust is typically measured with a linear load cell that is inline or offset from the propeller shaft, or in a moment arm arrangement. The aforementioned OSU dynamometer includes a linear, offset load cell for measuring thrust, which requires accounting for moment created by the offset distance. Alternatively, the NASA dynamometer in
Figure 2 includes inline thrust measurement with a pneumatic thrust capsule. Torque is also typically measured inline or by using a moment arm arrangement.
Figure 1 shows an example of an inline torque meter integrated into the previous OSU dynamometer, whereas the NASA Langley dynamometer includes torque arms for taking measurements with a moment. The advantages and disadvantages of these measurement approaches are discussed later in the design rationale for our proposed dynamometer.
1.2. Proposed Validation Method
The method includes a comparison of experimental results to BEMT analytical results over a relevant range of test conditions. A validated dynamometer should be able to resolve low-Reynolds-number effects. Furthermore, the method includes comparing experimental results for propellers of at least three different diameters and pitch over the same range of relevant test conditions. A validated dynamometer should distinguish a consistent trend in performance across different diameters and pitch. Finally, the proposed performance figures of merit should at least include thrust coefficient and propeller efficiency, noting that the power coefficient can be derived from those two figures of merit. The motivation for establishing this method is to assist those conducting propeller wind tunnel experiments, especially for Group 2 UAS, to improve the credibility of their results. This, in turn, will improve the confidence of those using propeller wind tunnel data in mission planning and aircraft design.
1.3. Objectives
The wind tunnel propeller dynamometer in this current study is intended to measure the propeller performance of Group 2 UAS. This paper will address the details and rationale for the dynamometer design. The objective of this paper is to present a method to validate the design using BEMT and experimental data from a 3 ft by 3 ft subsonic wind tunnel test section. The study evaluates the performance of three different propeller diameters, ranging from 14 to 18 inches, and three different magnitudes of pitch, ranging from 10 to 14 inches. Tunnel airspeeds range from 25 to 50 ft/s, and shaft speeds range from 1500 to 5500 revolutions per minute (RPM). The propeller dimensions considered in this paper are common and a good representation of Group 2 UAS propellers. However, there is a wide range of propellers in the Group 2 category. The objective of this paper is not to measure or improve propeller performance nor to present or improve dynamometer design (both of these are already well-documented), but rather, it is about a method for validating a propeller dynamometer.
1.4. Propeller Theory
This section provides a brief overview of parameters used to characterize propeller performance, and then presents the methodology for the BEMT code implemented over the course of this research to provide comparison data to contrast with the experimental results to validate our proposed propeller dynamometer.
1.4.1. Performance Characterization
Propellers are characterized by the amount of torque and thrust they produce at a given shaft speed, and by the ratio of the power transferred to the air versus the mechanical power supplied, known as propeller efficiency [
10,
11,
14]. As is typical in aerodynamics applications, the dimensional thrust and power are not typically specified; rather, non-dimensional coefficients are presented to allow the end-user of the data to adapt the results to their application (i.e., operating with a different atmospheric density or at a different velocity). Unlike aircraft wing aerodynamics, which are non-dimensionalized using freestream velocity, propeller performance coefficients are based in the propeller frame of reference, using chord-wise velocity at a given radial location as a function of both freestream and rotational velocities.
Reynolds number is defined as the ratio of momentum force to viscous shear force. For propellers, Reynolds number is based on chord length (
c), relative velocity (
), air density (
), and dynamic viscosity (
). In order to satisfy the objectives of this research for validating a wind tunnel propeller dynamometer for Group 2 UAS, testing was conducted at low Reynolds numbers.
Propeller characteristics are typically cataloged as a function of the ratio between freestream and angular velocity to allow for translation to arbitrary operating speeds. This ratio is known as the advance ratio (
J), and is shown symbolically in Equation (
2), where
V is freestream velocity,
n is the rotational speed in revolutions per second, and
D is propeller diameter.
Thrust coefficient, defined as shown in Equation (
3), is a non-dimensional quantity that relates thrust produced (
T) to the rotational velocity (
n) and propeller diameter (
D), where
is the density of the air the propeller is acting on.
Similarly, power and torque coefficients are non-dimensional quantities that relate power (
P) and torque (
Q), respectively, to the rotational velocity and propeller diameter, as in Equation (
4).
Finally, propeller efficiency (
) is the ratio of power transferred to the air by the propeller to the mechanical power required to turn the propeller, as shown in Equation (
6).
1.4.2. Blade Element Momentum Theory
Blade Element Momentum Theory (BEMT) is a common methodology for predicting propeller performance in terms of the coefficients defined in
Section 1.4.1. BEMT requires only a few inputs. The code implemented for this research is described succinctly by the flowchart presented as
Figure 4, and is similar to examples found in [
22,
23,
24,
25].
The first step in the BEMT solution process is to discretize propeller geometry for analysis. Input files catalog propeller twist and the local airfoil profile for
n radial segments, specified by distance from the hub (
r), each of length
, from the hub to the tip. The measurements describing propeller geometry specification are shown as
Figure 5.
In addition to propeller geometry data, the propeller operating condition is input by specifying freestream velocity () and RPM for a given run of the BEMT code.
After a run case begins, the code takes on assumed values for the axial and angular inflow factors,
and
, respectively, for each propeller segment of length
. The initial assumed values for
and
are 0.1 and 0.01, respectively. These terms are induction factors describing the axial and angular velocity components,
and
, respectively, within an annular streamtube containing
. Due to the propeller rotation, the fluid within streamtube
i acquires the velocity components modeled as
and
which are accounted for during application of momentum conservation equations.
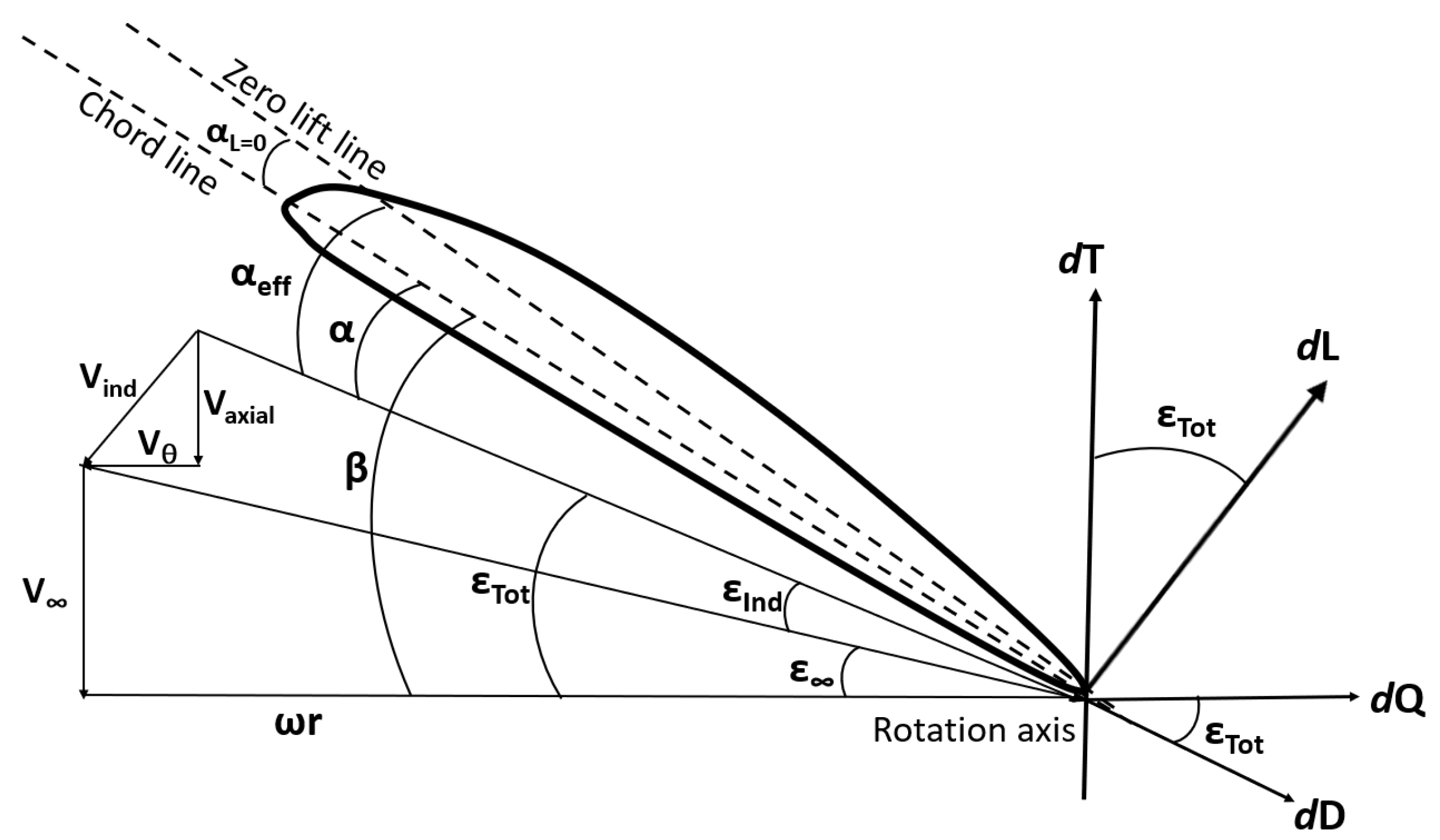
Subsequently, the total downwash angle is computed for each blade segment. The local flow geometry and definitions for force directions for a blade segment are shown in
Figure 6.
Given the freestream velocity, rotational velocity at the radial location under consideration, and the induced velocities due to the propeller motion, the total downwash angle at segment
i is computed as shown in Equation (
7).
Next, with the total downwash angle defined, the local lift and drag coefficients for the airfoil sections can be determined. For each blade segment, the effective angle of attack
is the sum of the geometric angle of attack (AOA),
and zero-lift AOA,
. The geometric AOA is defined in Equation (
8), where
is the geometric pitch angle
Given the effective angle of attack,
, the
and
for each section is straightforward to determine from tables of 2-D aerodynamic data. As the APC (Advanced Precision Composites) propellers studied experimentally are predominately made up of National Advisory Committee for Aeronautics (NACA) 4412 airfoils [
14], this cross-section was assumed for each propeller segment in the BEMT code. In this work, the 2-D input aerodynamic data are developed from XFOIL [
26] analysis at the Reynolds number computed based on the vector sum of the freestream and rotational velocity and chord at the 75% radial location, as is common in propeller aerodynamics [
11].
Then, the total thrust and torque the propeller is producing are estimated. For each blade segment, the incremental thrust and torque are shown as Equations (
9) and (
10), respectively.
where dynamic pressure at radial location
i is defined as shown in Equation (
11).
The total thrust and torque produced by the propeller are estimated by integrating the incremental thrust and torque contributions along the blade span, and multiplying by the number of blades (
N) on the propeller. The total power of the propeller is obtained by multiplying angular velocity with total torque of the propeller (
) [
22].
Finally, in order to determine if the conservation of axial and angular momentum is satisfied by the current solution, the induction factors
and
are computed for each radial section using Equations (
12) and (
13) and the incremental thrust and torque found previously using Equations (
9) and (
10).
If the induction factors match the values at the beginning of the solution procedure within a user-defined tolerance, outputs are stored for the flow condition under consideration. Otherwise, the induction factors are updated with an average of the newly calculated and initial inflow factor guess, and the solution procedure is repeated until convergence is achieved; the solution is considered converged when the new
and
are less than 1 × 10
.
5. Conclusions
Group 2 unmanned aircraft represent a large and continually growing segment of aerospace operations and businesses that demand optimal mission performance enabled by propulsion systems. It is critical that reliable experimental propeller performance data are available to UAS designers and mission planners, especially when progressing from low-order models to validated, higher-fidelity estimates. Wind tunnel propeller dynamometer designs have been well-documented for a range of propeller sizes, and the principles have been applied to the dynamometer design in this study. However, it is important to have a proper method to validate dynamometer performance, which is particularly challenging for propellers at the low-Reynolds-number operating conditions often associated with Group 2 UAS. Because there is a lack of validated wind tunnel performance data for this particular scale, an approach to validating such wind tunnel propeller dynamometers is presented here. The method includes using BEMT code and experimental results to authenticate a dynamometer.
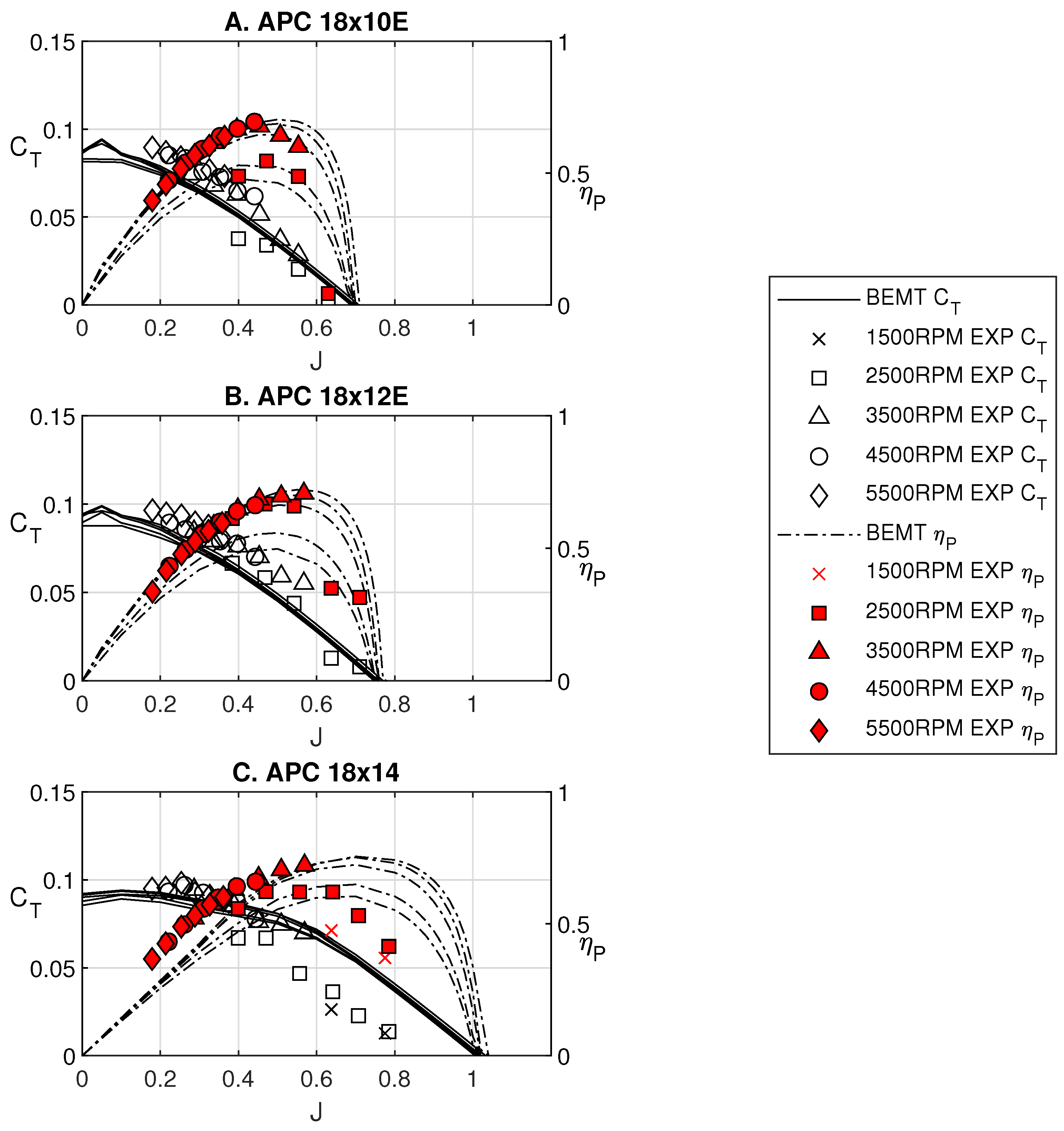
The proper application of the BEMT code was shown by comparing results to existing propeller data of a smaller scale (14 × 12E), revealing less than 10% difference between BEMT and experimental results over a range of advance ratios from 0.3 to 0.6. The BEMT code was then applied to larger-scale propellers to predict performance with a wind tunnel dynamometer at airspeeds relevant to Group 2 UAS. BEMT and experimental results were in good agreement, particularly for thin electric propellers, up to advance ratios of about 0.6, above which Reynolds number effects become problematic such that BEMT predicted propeller efficiency increases as thrust coefficient approaches zero.
The validation method proposed here also involved experimentally demonstrating expected effects of propeller diameter and pitch. Results showed that a reliable dynamometer should resolve that peak efficiency occurs at higher advance ratios with increasing pitch, showing peak efficiency at about a 25% higher advance ratio when increasing pitch from an 18 × 10E to 18 × 12E propeller. This effect was particularly noticeable for thin electric propellers. Peak efficiency also shifts to lower advance ratios as propeller diameter decreases. Peak efficiency occured at a 10% lower advance ratio from an 18 × 12E to 16 × 12E propeller. Furthermore, a dynamometer should be able to resolve differences in propeller type, as shown by results for thin electric and sport propellers, particularly apparent when comparing 18 × 12E thin electric propeller results to those of an 18 × 14 sport propeller.
Use of the method presented here is recommended for validating wind tunnel propeller dynamometers for Group 2 UAS. It is important to apply it to advance ratios between about 0.3 and 0.6 to ensure reliable propeller performance data. A validated dynamometer should produce thrust coefficient and propeller efficiency results within 10% of the results from BEMT analysis. Furthermore, a validated dynamometer should be able to resolve performance effects associated with varying propeller diameter and pitch, as well as propeller type. Future work related to this study is recommended to show the effects of novel flow control methods to mitigate degraded propeller performance due to low-Reynolds-number operating conditions. Results from such a study will be enabled with a validated propeller dynamometer.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















