
Fast Sparse Bayesian Learning-Based Channel Estimation for Underwater Acoustic OFDM Systems


Abstract
:1. Introduction
2. System Model
3. Proposed CE Method
3.1. SBL-Based CE
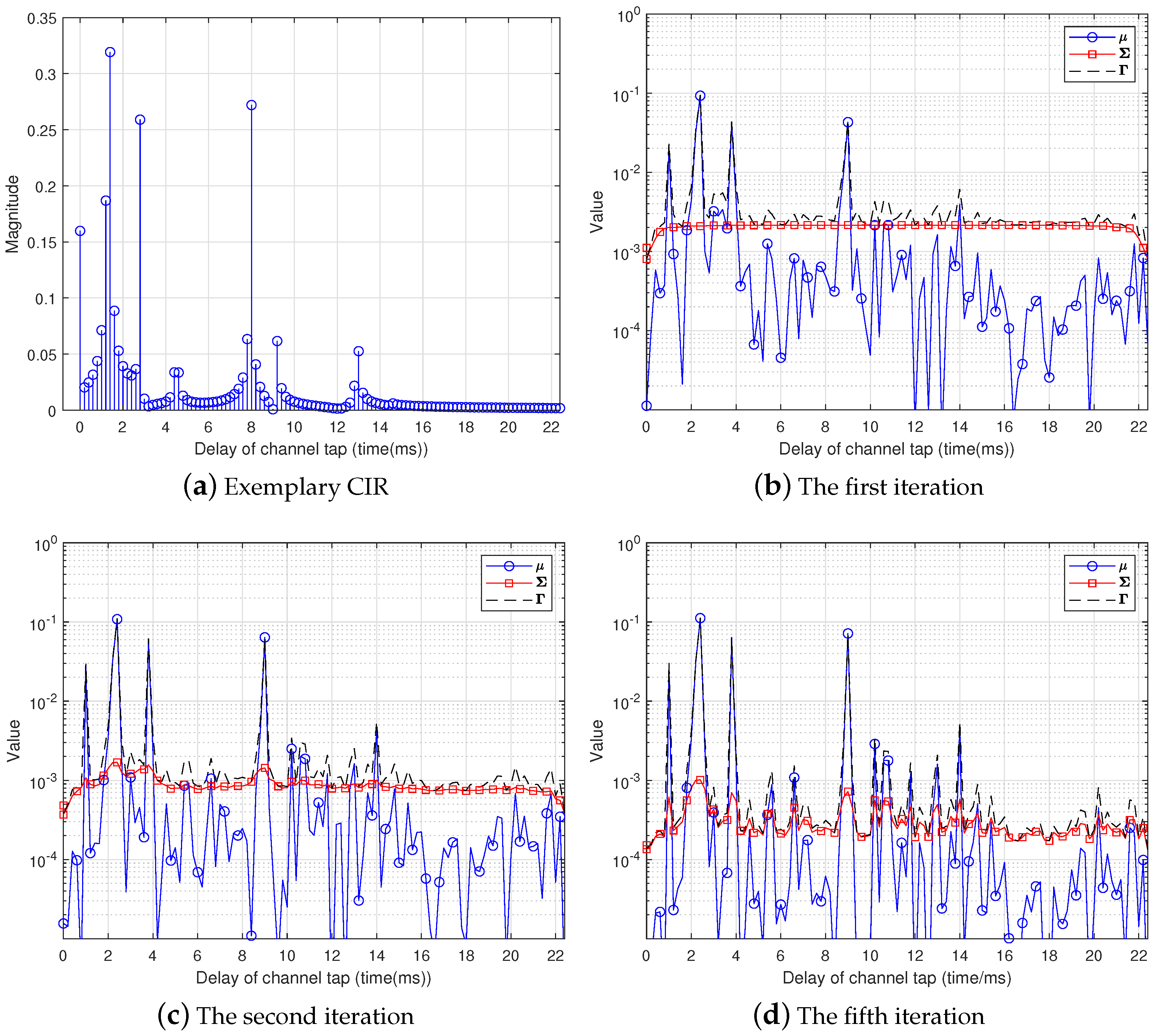
3.2. Fast SBL-Based CE
| Algorithm 1 F-SBL algorithm. |
| Input: and for , stopping parameter , the maximum number of iterations , weights and , noise variance Output: for
|
3.3. Performance Analysis
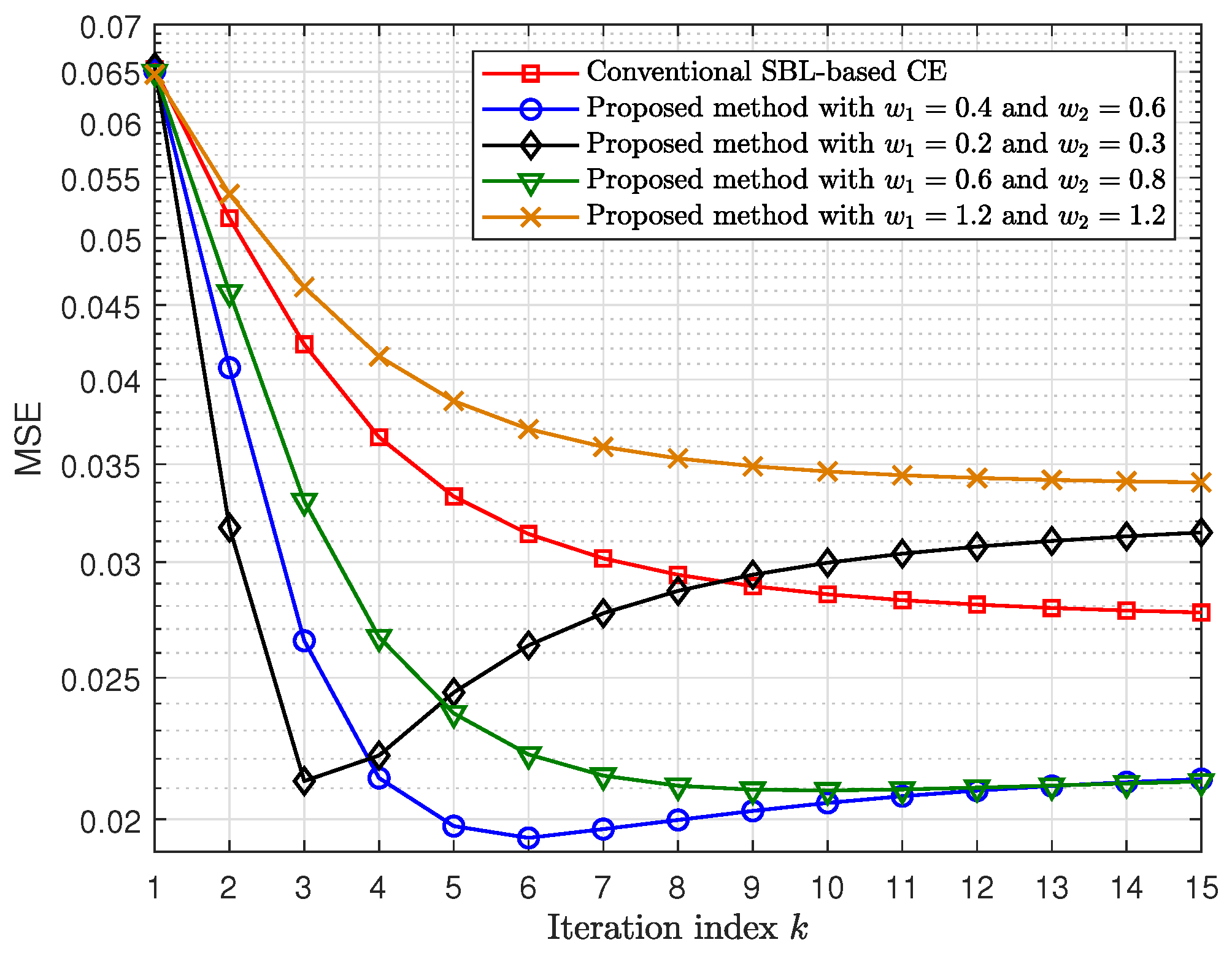
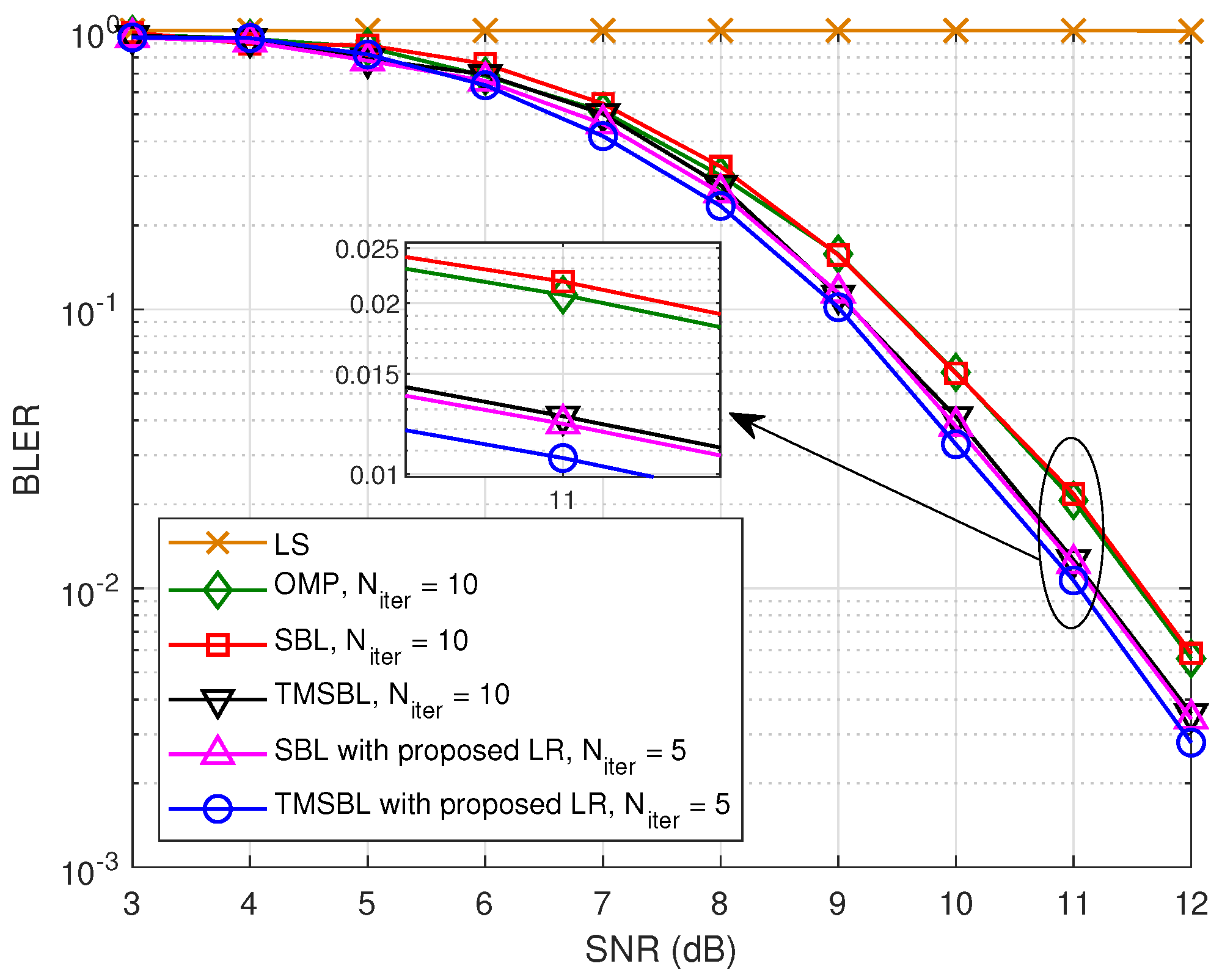
4. Simulation Results
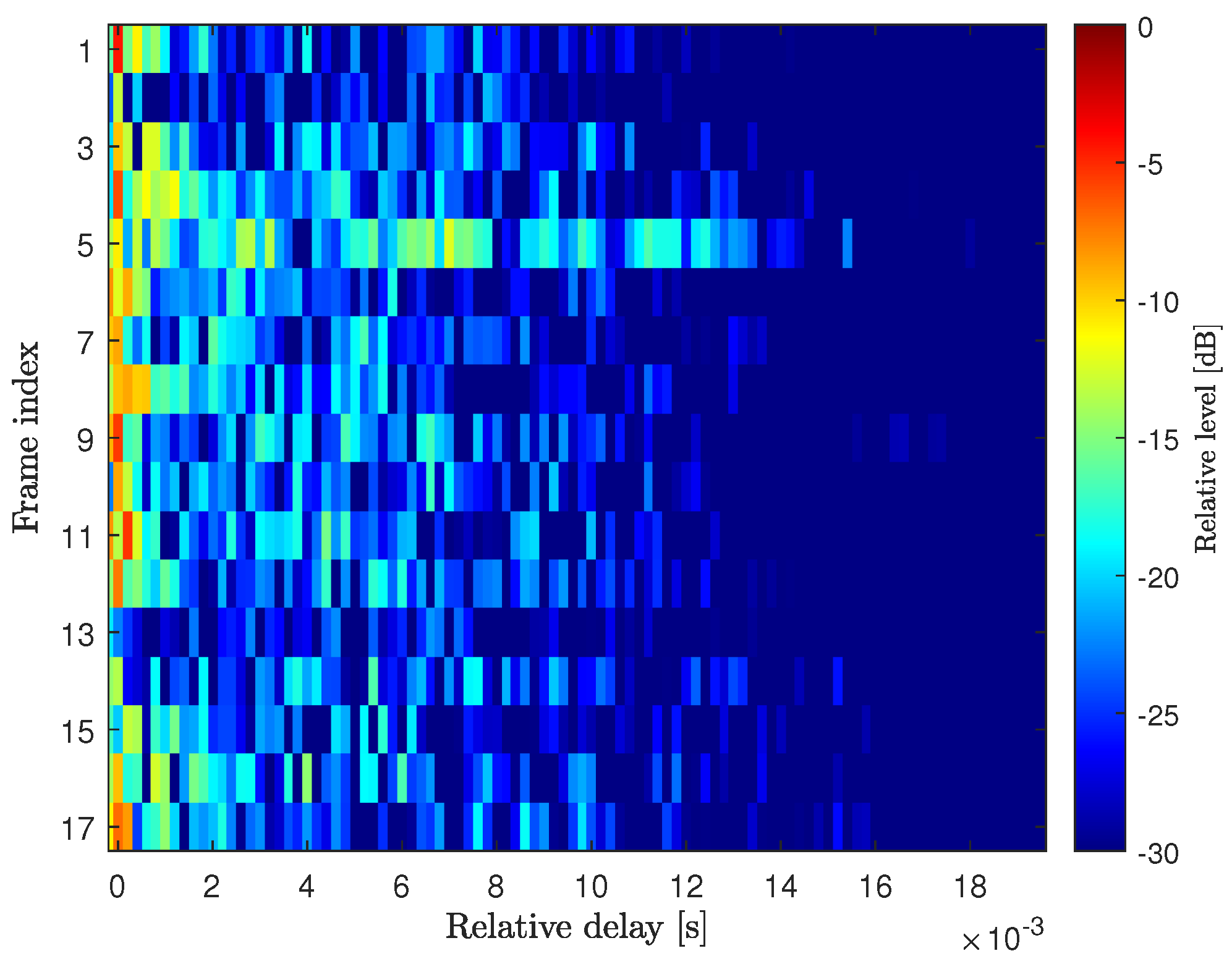
5. Experimental Results
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| USN | underwater sensor network |
| AUV | autonomous underwater vehicle |
| UWA | underwater acoustic |
| OFDM | orthogonal frequency division multiplexing |
| CE | channel estimator |
| CS | compressed sensing |
| SBL | sparse Bayesian learning |
| TMSBL | temporal multiple SBL |
| F-SBL | fast SBL |
| LR | learning rule |
| AWGN | additive white Gaussian noise |
References
- Karim, S.; Shaikh, F.K.; Chowdhry, B.S.; Mehmood, Z.; Tariq, U.; Naqvi, R.A.; Ahmed, A. GCORP: Geographic and cooperative opportunistic routing protocol for underwater sensor networks. IEEE Access 2021, 9, 27650–27667. [Google Scholar] [CrossRef]
- Wu, J.; Song, C.; Ma, J.; Wu, J.; Han, G. Reinforcement Learning and Particle Swarm Optimization Supporting Real-Time Rescue Assignments for Multiple Autonomous Underwater Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6807–6820. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Huang, J.; Berger, C.R.; Zhou, S.; Huang, J. Comparison of basis pursuit algorithms for sparse channel estimation in underwater acoustic OFDM. In Proceedings of the OCEANS’10 IEEE, Sydney, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Berger, C.; Zhou, S.; Preisig, J.; Willett, P. Sparse Channel Estimation for Multicarrier Underwater Acoustic Communication: From Subspace Methods to Compressed Sensing. IEEE Trans. Signal Process. 2010, 58, 1708. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Huang, J.; Berger, C.R.; Zhou, S.; Willett, P. Iterative sparse channel estimation and decoding for underwater MIMO-OFDM. EURASIP J. Adv. Signal Process. 2010, 2010, 460379. [Google Scholar] [CrossRef] [Green Version]
- Qiao, G.; Song, Q.; Ma, L.; Liu, S.; Sun, Z.; Gan, S. Sparse Bayesian learning for channel estimation in time-varying underwater acoustic OFDM communication. IEEE Access 2018, 6, 56675–56684. [Google Scholar] [CrossRef]
- Wang, S.; Li, D.; Liu, M.; Huang, W.; Chen, H.; Cen, Y. Clustered-Sparse Bayesian Learning for Channel Estimation in Underwater Acoustic OFDM Systems. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; pp. 546–551. [Google Scholar]
- Qin, X.; Qu, F.; Zheng, Y.R. Bayesian iterative channel estimation and turbo equalization for multiple-input–multiple-output underwater acoustic communications. IEEE J. Ocean. Eng. 2020, 46, 326–337. [Google Scholar] [CrossRef]
- Jia, S.; Zou, S.; Zhang, X.; Tian, D.; Da, L. Multi-block Sparse Bayesian learning channel estimation for OFDM underwater acoustic communication based on fractional Fourier transform. Appl. Acoust. 2022, 192, 108721. [Google Scholar] [CrossRef]
- Qiao, G.; Song, Q.; Ma, L.; Sun, Z.; Zhang, J. Channel prediction based temporal multiple sparse bayesian learning for channel estimation in fast time-varying underwater acoustic OFDM communications. Signal Process. 2020, 175, 107668. [Google Scholar] [CrossRef]
- Wang, S.; Liu, M.; Li, D. Bayesian Learning-Based Clustered-Sparse Channel Estimation for Time-Varying Underwater Acoustic OFDM Communication. Sensors 2021, 21, 4889. [Google Scholar] [CrossRef] [PubMed]
- Acar, Y.; Doğan, H.; Panayirci, E. Pilot symbol aided channel estimation for spatial modulation-OFDM systems and its performance analysis with different types of interpolations. Wirel. Pers. Commun. 2017, 94, 1387–1404. [Google Scholar] [CrossRef]
- Xu, T.; Tang, Z.; Leus, G.; Mitra, U. Multi-rate block transmission over wideband multi-scale multi-lag channels. IEEE Trans. Signal Process. 2012, 61, 964–979. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Yu, H.; Wei, G.; Ji, F.; Chen, F. Parameter estimation of wideband underwater acoustic multipath channels based on fractional Fourier transform. IEEE Trans. Signal Process. 2016, 64, 5396–5408. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier communication over underwater acoustic channels with nonuniform Doppler shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar]
- Wipf, D.P.; Rao, B.D. Sparse Bayesian learning for basis selection. IEEE Trans. Signal Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Tipping, M. The relevance vector machine. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 29 November–4 December 1999; Volume 12. [Google Scholar]
- MacKay, D.J. Bayesian interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice Hall PTR: Hoboken, NJ, USA, 1993. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Carrier Frequency | 12 kHz | |
| Bandwidth | B | 5 kHz |
| Sampling frequency | 5 kHz | |
| No. of total subcarriers | N | 512 |
| No. of useful subcarriers | 400 | |
| No. of null subcarriers | 109 | |
| pilot symbols spacing in freq. | 4 | |
| pilot symbols spacing in time | 2 | |
| No. of preambles | 2 | |
| No. of OFDM symbols | 16 | |
| OFDM block duration | 125 ms | |
| CP duration | 22.6 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, Y.-H. Fast Sparse Bayesian Learning-Based Channel Estimation for Underwater Acoustic OFDM Systems. Appl. Sci. 2022, 12, 10175. https://doi.org/10.3390/app121910175
Cho Y-H. Fast Sparse Bayesian Learning-Based Channel Estimation for Underwater Acoustic OFDM Systems. Applied Sciences. 2022; 12(19):10175. https://doi.org/10.3390/app121910175
Chicago/Turabian StyleCho, Yong-Ho. 2022. "Fast Sparse Bayesian Learning-Based Channel Estimation for Underwater Acoustic OFDM Systems" Applied Sciences 12, no. 19: 10175. https://doi.org/10.3390/app121910175
APA StyleCho, Y. -H. (2022). Fast Sparse Bayesian Learning-Based Channel Estimation for Underwater Acoustic OFDM Systems. Applied Sciences, 12(19), 10175. https://doi.org/10.3390/app121910175