
Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles


Abstract
:1. Introduction
2. Related Work
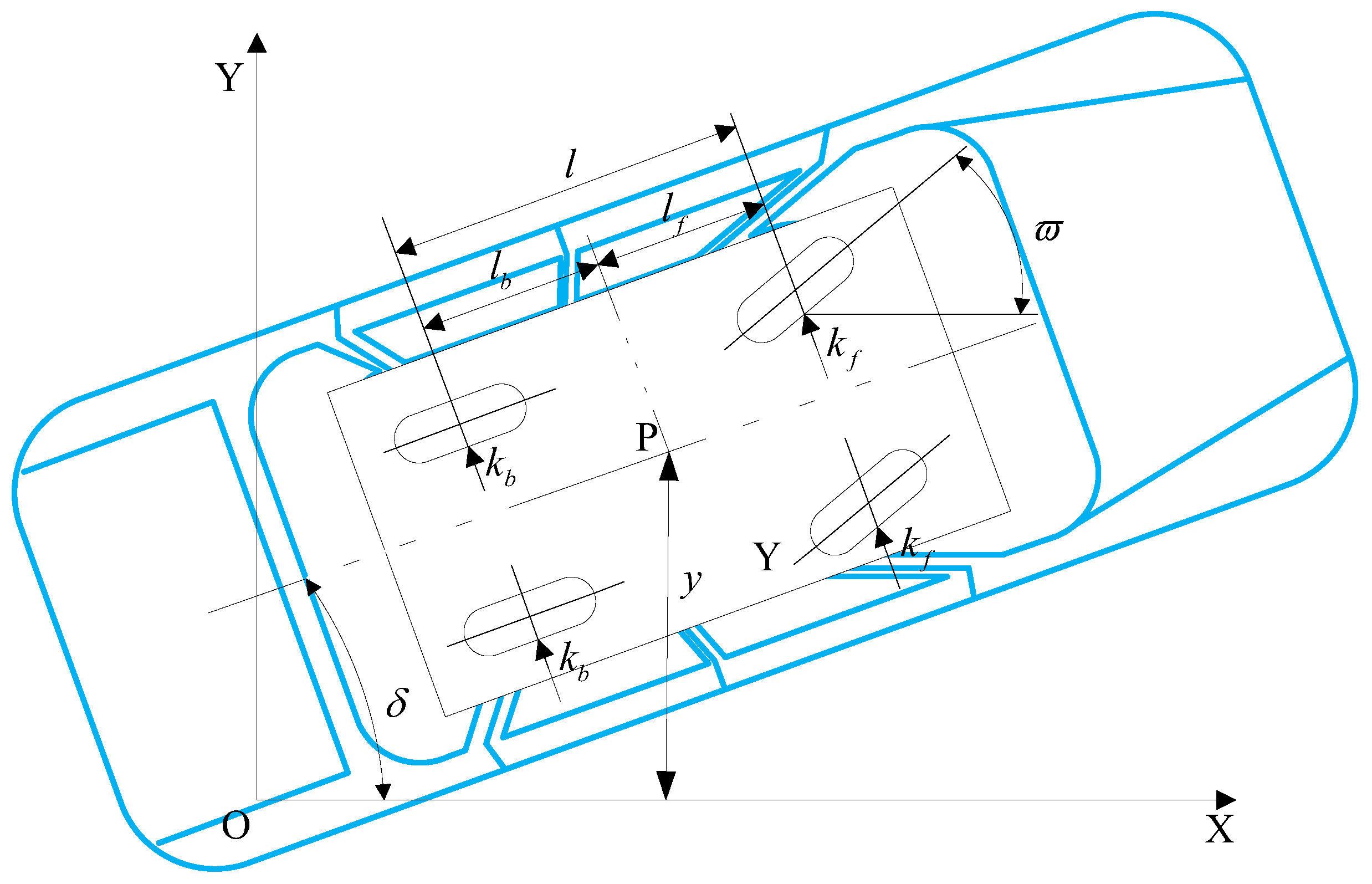
3. Vehicle Dynamics Model
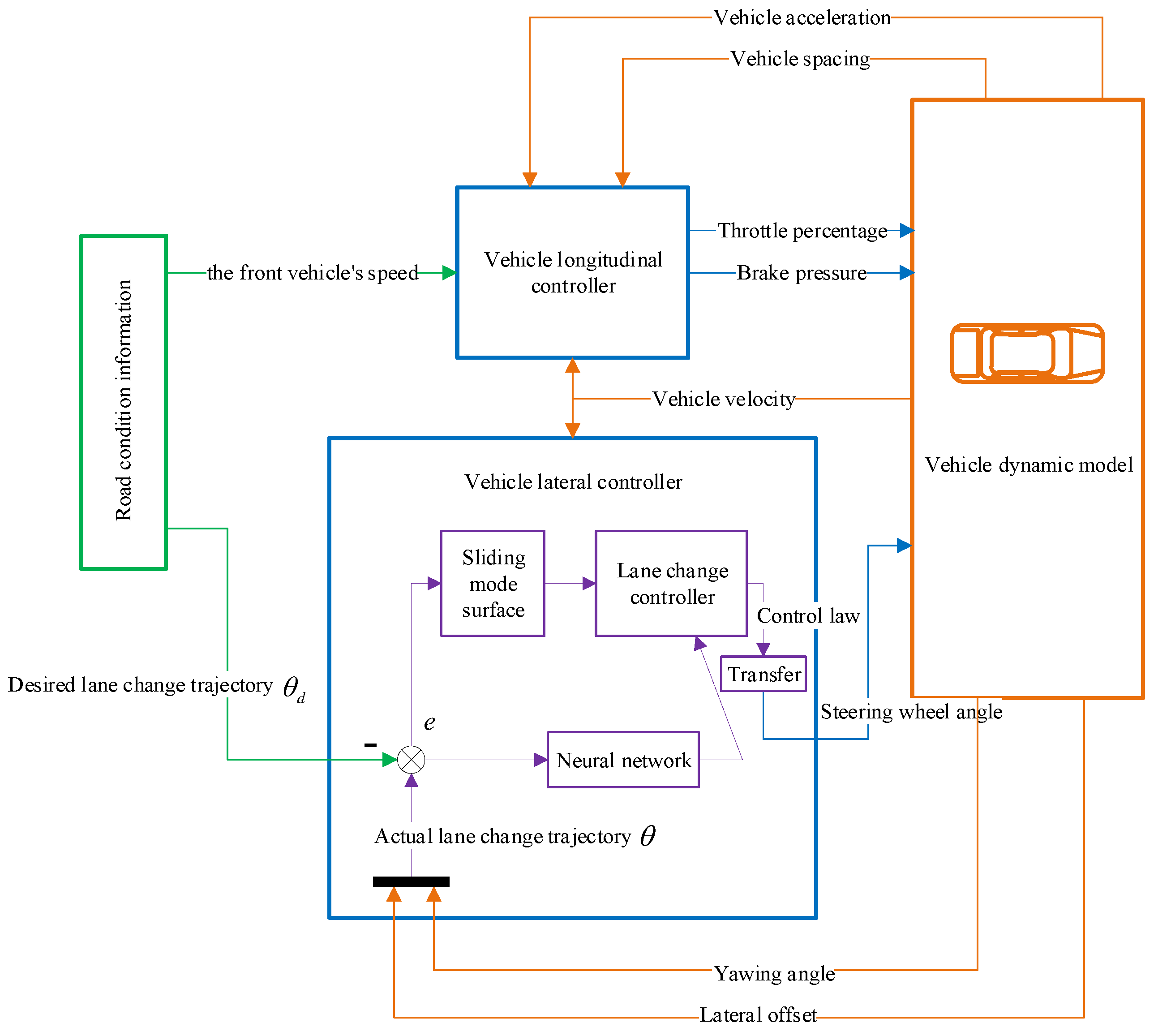
4. Control System and Problem Statement
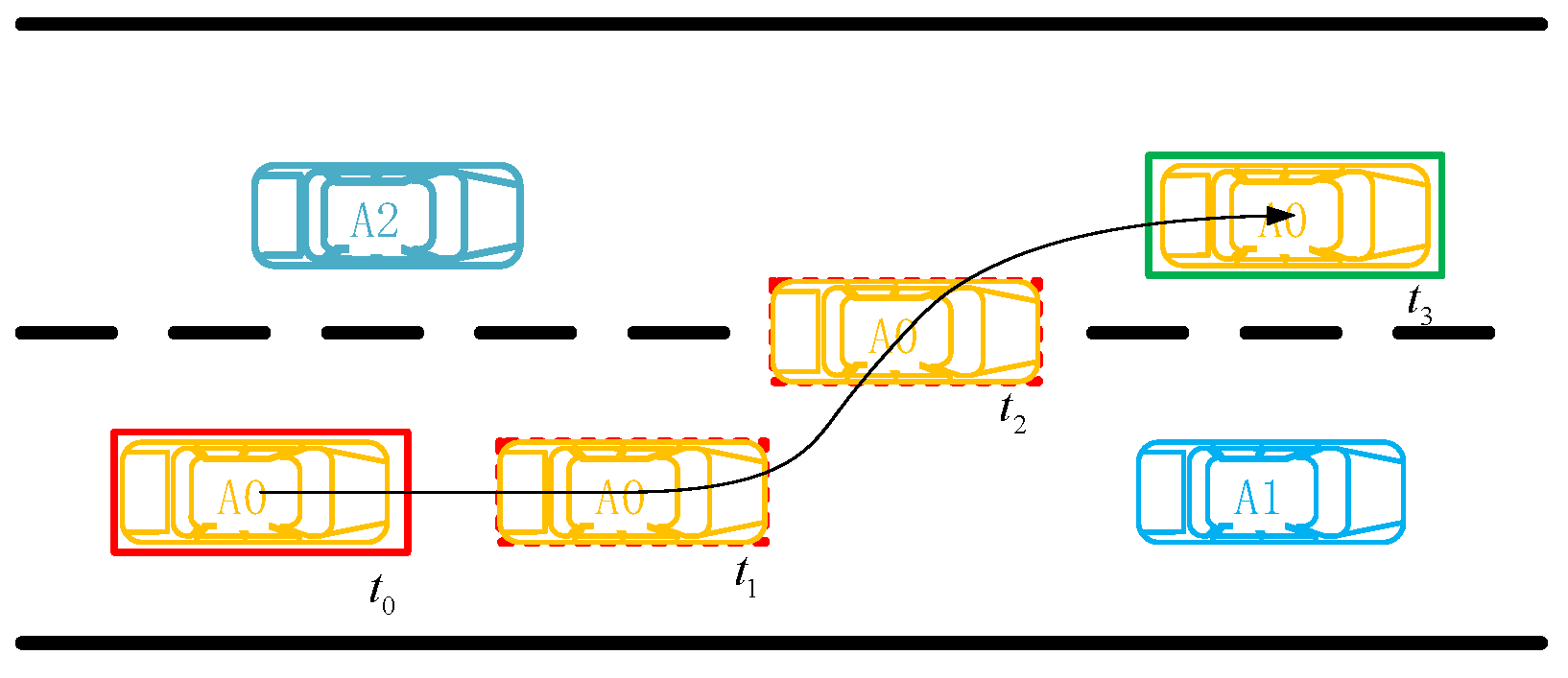
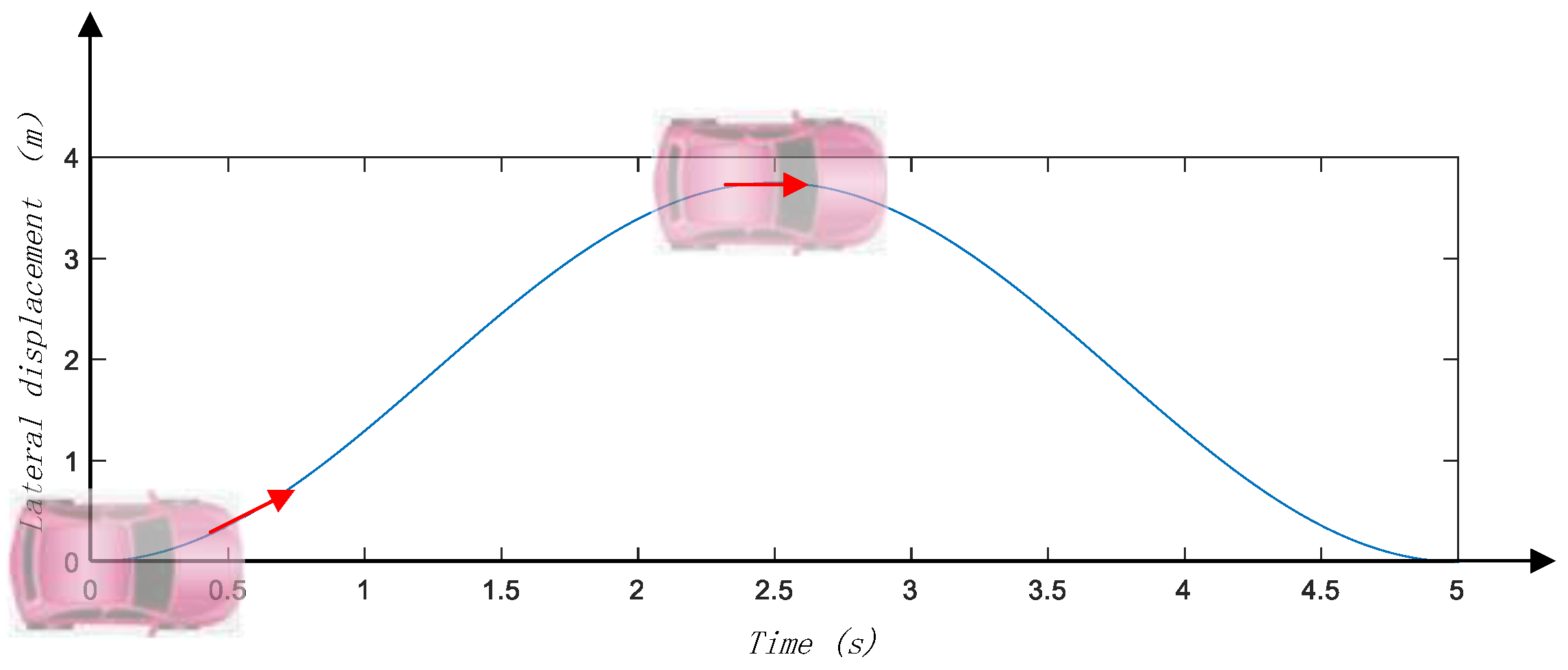
4.1. Path Planning
4.2. SMC-Based Controller Design
4.3. Enhanced SMC-Based Controller Design
5. Experiments and Discussion
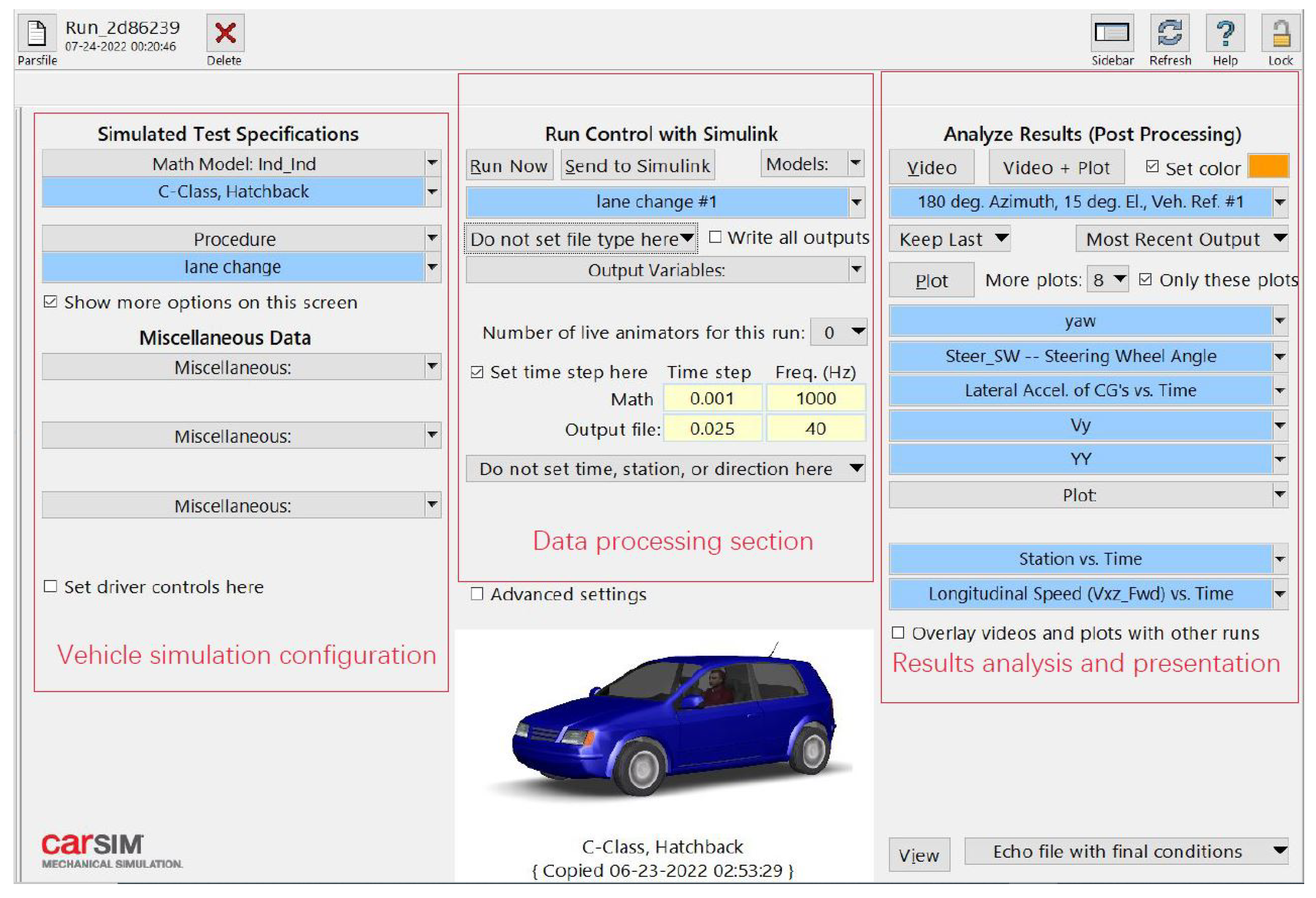
5.1. Experimental Parameter Configuration
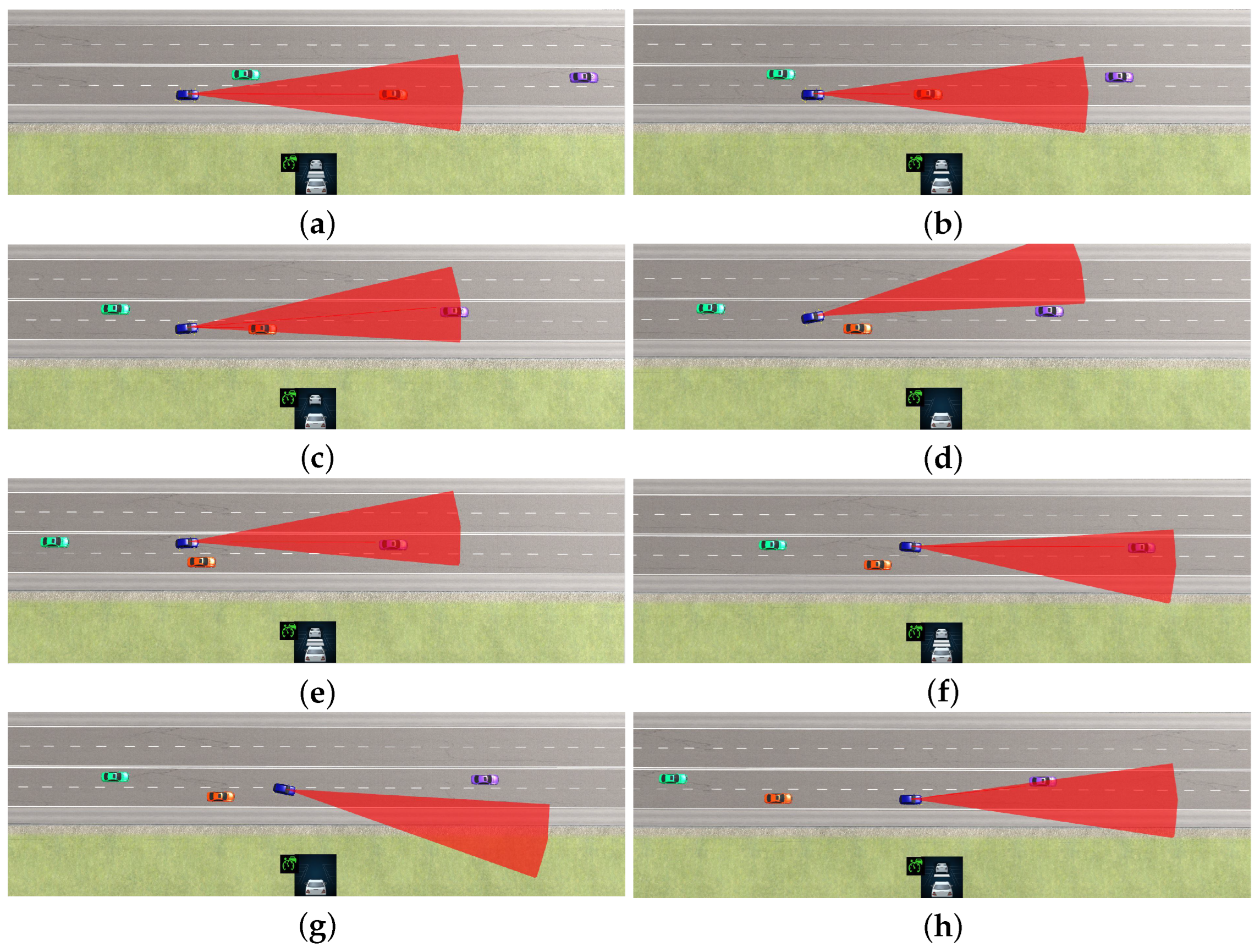
5.2. Scenario Study
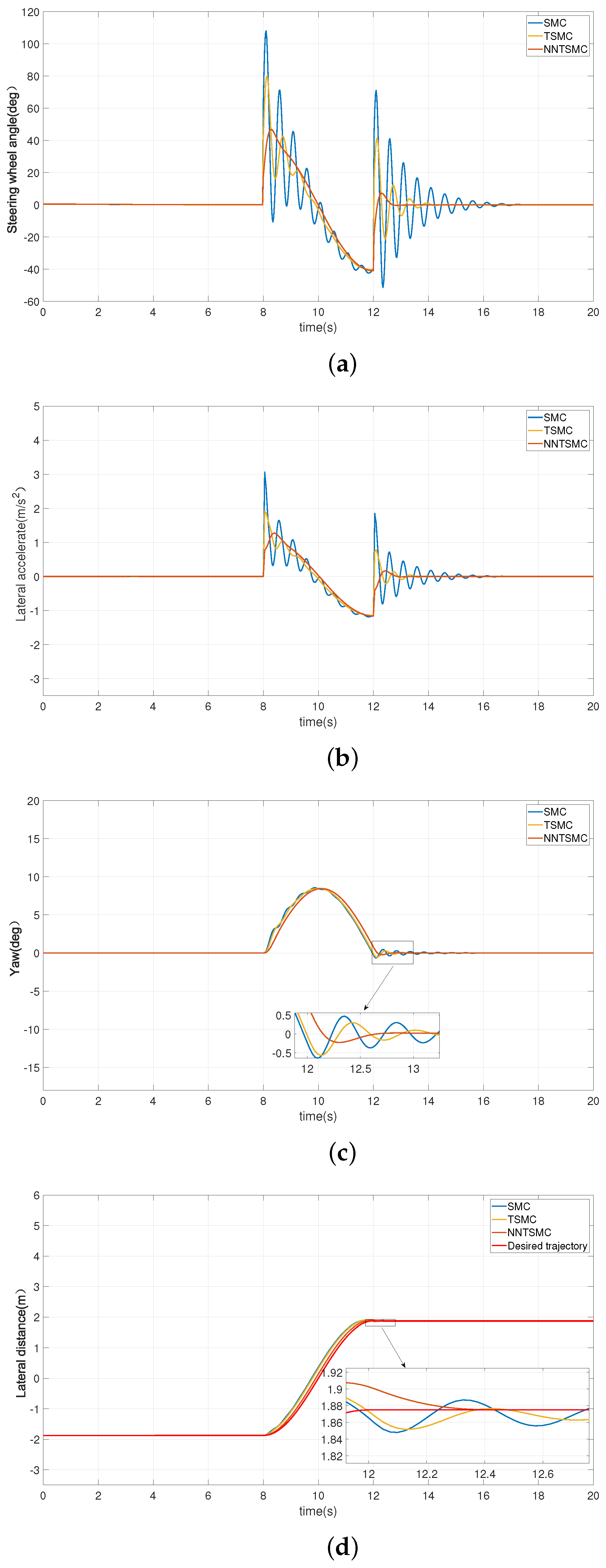
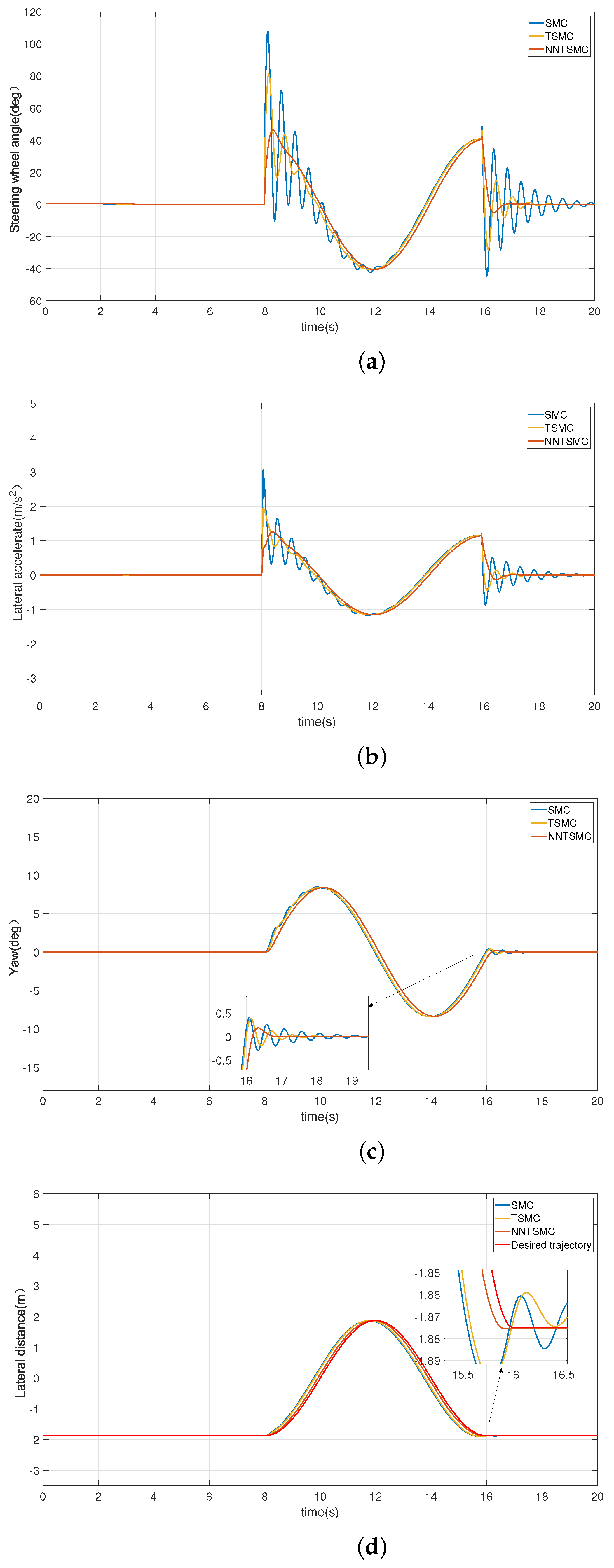
5.3. Verification and Results Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Z. Recent developments and research needs in modeling lane changing. Transp. Res. Part B Methodol. 2014, 60, 16–32. [Google Scholar]
- Ishtiak, A.; Alan, F.K.; Nagui, M.R.; Thomas, C.; Shams, T. Characterizing lane changing behavior and identifying extreme lane changing traits. Transp. Lett. 2022. [Google Scholar] [CrossRef]
- Mahmood, A.A.; Selvakumar, M.; Badiea, A.M.; Zeyad, G.A.; Amjad, Q.; Abdullah, J.A.; Gharbi, A.; Amer, A.S.; Khalil, A. Provably Secure with Efficient Data Sharing Scheme for Fifth-Generation (5G)-Enabled Vehicular Networks without Road-Side Unit (RSU). Sustainability 2022, 14, 9961. [Google Scholar] [CrossRef]
- Cui, Y.; Wu, J.Q.; Xu, H.; Wang, A.B. Lane change identification and prediction with roadside LiDAR data. Opt. Laser Technol. 2020, 123, 105934. [Google Scholar] [CrossRef]
- Panichpapiboon, S.; Leakkaw, P. Lane change detection with smartphones: A steering wheel-based approach. IEEE Access 2020, 8, 91076–91088. [Google Scholar] [CrossRef]
- Woo, H.; Sugimoto, M.; Madokoro, H.; Sato, K.; Tamura, Y.; Yamashita, A.; Asama, H. Goal estimation of mandatory lane changes based on interaction between drivers. Appl. Sci. 2020, 9, 3289. [Google Scholar] [CrossRef]
- Mahmood, A.A.; Mohammed, A.; Iznan, H.H.; Selvakumar, M.Z. Survey of Authentication and Privacy Schemes in Vehicular Ad Hoc Networks. IEEE Sens. J. 2021, 21, 2422–2433. [Google Scholar]
- Mahmood, A.A.; Mohammed, A.; Selvakumar, M.; Iznan, H.H. A Secure Pseudonym-Based Conditional Privacy-Preservation Authentication Scheme in Vehicular Ad Hoc Networks. Sensors 2022, 22, 1696. [Google Scholar] [CrossRef]
- Mahmood, A.A.; Mohammed, A.; Selvakumar, M.; Iznan, H.H. Password-Guessing Attack-Aware Authentication Scheme Based on Chinese Remainder Theorem for 5G-Enabled Vehicular Networks. Appl. Sci. 2022, 12, 1383. [Google Scholar] [CrossRef]
- Hu, C.; Wang, Z.; Qin, Y.; Huang, Y.; Wang, J.; Wang, R. Lane Keeping Control of Autonomous Vehicles With Prescribed performance considering the rollover prevention and input saturation. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3091–3103. [Google Scholar]
- Gipps, P.G. A model for the structure of lane-changing decision. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Yang, Q.I.; Koutsopoulos, H.N. A model for the structure of lane-changing decision. Transp. Res. C 1996, 4, 113–129. [Google Scholar] [CrossRef]
- Barcelo, J.; Ferrer, J.L.; Grau, R. A Route Based Variant of the AIMSUM2 Microsimulation Model. In Proceedings of the Steps Forward Intelligent Transport Systems World Congress, Yokohama, Japan, 9–11 November 1995. [Google Scholar]
- Nagel, K.; Wolf, D.E.; Wagner, P. Two-lane traffic rules for cellular automata: A systematic approach. Phys. Rev. E Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 1997, 58, 1425–1437. [Google Scholar] [CrossRef]
- Benekohal, R.F. Traffic Congestion and Traffic Safety in the 21st Century: Challenges, Innovations, and Opportunities, Chicago, Illinois, June 8–11, 1997: Proceedings of the Conference Sponsored by Urban Transportation Division, ASCE, Highway Division, ASCE; American Society of Civil Engineers: New York, NY, USA, 1997. [Google Scholar]
- Hidas, P. Modeling lane changing and merging in microscopic traffic simulation. Transp. Res. C 2002, 10, 351–371. [Google Scholar] [CrossRef]
- Chen, L.; Qin, D.F.; Xu, X.; Cai, Y.F.; Xie, J. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3-D Bezier curve. Adv. Eng. Softw. 2019, 132, 65–73. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, Z.; Guan, Z.; Li, Y.; Li, Z. Autonomous lane changing control for intelligent vehicles. Clust. Comput. 2018, 22, 8657–8667. [Google Scholar] [CrossRef]
- Ding, Y.; Zhuang, W.C.; Wang, L.M.; Liu, J.X.; Guvenc, L.; Li, Z. Safe and optimal lane-change path planning for automated driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 235, 1070–1083. [Google Scholar] [CrossRef]
- Feng, Z.Q.; Song, W.J.; Fu, M.Y.; Yang, Y.; Wang, M.L. Decision-making and path planning for highway autonomous driving based on spatio-temporal lane-change gaps. IEEE Syst. J. 2021, 16, 3249–3259. [Google Scholar] [CrossRef]
- You, F.; Zhang, R.; Lie, G.; Wang, H.; Wen, H.; Xu, J. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42, 5932–5946. [Google Scholar] [CrossRef]
- Ren, D.; Zhang, J.; Zhang, J.; Cui, S. Trajectory planning and yaw rate tracking control for lane changing of intelligent vehicle on curved road. Sci. China Technol. Sci. 2011, 54, 630–642. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, X.; Su, H.; Tang, G. Lane changing trajectory planning and tracking control for intelligent vehicle on curved road. SpringerPlus 2016, 5, 1150. [Google Scholar]
- Jing, C.; Shu, H.; Shu, R.; Song, Y. Integrated control of electric vehicles based on active front steering and model predictive control. Sci. China Technol. Sci. 2022, 121, 105066. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, J.W.; Liu, Y.; Guo, K.H.; Ding, H.T. Planning flexible and smooth paths for lane-changing manoeuvres of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 200–212. [Google Scholar]
- Ren, D.; Zhang, J.; Cui, S.; Zhang, J. Variable structure control for platoon lane change in automated highway systems. J. Harbin Inst. Technol. 2009, 41, 109–114. [Google Scholar]
- Qi, Z.; Yang, Z.; Huang, Y. Lane Change Track Control for Intelligent 4WS Vehicle Based on Fuzzy Adaptive PID. Chin. J. Automot. Eng. 2012, 2, 379–384. [Google Scholar]
- Guo, L.; Ge, P.; Yue, M.; Zhao, Y. Lane Changing Trajectory Planning and Tracking Controller Design for Intelligent Vehicle Running on Curved Road. Math. Probl. Eng. 2014, 2014, 478573. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Shu, M.; Wang, Y.; Liu, R. Robust H∞ Control for Path Tracking of Network-Based Autonomous Vehicles. Math. Probl. Eng. 2020, 2020, 2537086. [Google Scholar] [CrossRef]
- Li, H.; Huang, J.; Yang, Z.; Hu, Z.; Yang, D.; Zhong, Z. Adaptive robust path tracking control for autonomous vehicles with measurement noise. Int. J. Robust Nonlinear Control 2022, 32, 7319–7335. [Google Scholar]
- Luo, F.; Zeng, X. Research on path following algorithm for autonomous vehicle based on multiple look-ahead points. Mechatronics 2018, 6, 17–22. [Google Scholar]
- Chen, X.; Zhou, B.; Wu, X. Autonomous vehicle path tracking control considering the stability under lane change. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 1388–1402. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Vehicle sprung mass | 1723 kg |
| Internal engine power | 125 N·m |
| Peak engine torque | 267.3 kW |
| Vehicle length | 2578 mm |
| Vehicle width | 1739 mm |
| Vehicle heigth | 1478 mm |
| Distance between mass center and front axle | 1232 mm |
| Roll inertia | 1243.1 kg·m2 |
| Pitch inertia | 4331.6 kg·m2 |
| Yaw inertia | 4175 kg·m2 |
| Frontal area | 1.6 m2 |
| Road friction coefficient | 0.65 |
| Method Name | = 10 (m/s) | ||
|---|---|---|---|
| Scenario A | Maximum lateral acceleration (m/s2) | SMC | 3.065 |
| TSMC | 1.925 | ||
| Proposed | 1.269 | ||
| Maximum lateral error (m) | SMC | 0.281 | |
| TSMC | 0.252 | ||
| Proposed | 0.118 | ||
| Scenario B | Maximum lateral acceleration (m/s2) | SMC | 3.065 |
| TSMC | 1.965 | ||
| Proposed | 1.272 | ||
| Maximum lateral error (m) | SMC | 0.377 | |
| TSMC | 0.331 | ||
| Proposed | 0.137 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Du, Y. Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles. Appl. Sci. 2022, 12, 11000. https://doi.org/10.3390/app122111000
Wang C, Du Y. Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles. Applied Sciences. 2022; 12(21):11000. https://doi.org/10.3390/app122111000
Chicago/Turabian StyleWang, Chengmei, and Yuchuan Du. 2022. "Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles" Applied Sciences 12, no. 21: 11000. https://doi.org/10.3390/app122111000
APA StyleWang, C., & Du, Y. (2022). Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles. Applied Sciences, 12(21), 11000. https://doi.org/10.3390/app122111000