1. Introduction
Applications using passive RFID (Radio Frequency Identification) technology, especially in the UHF (Ultra-High-Frequency) spectrum, are encountered in many sectors of operation nowadays. It is especially the identification and localization of objects and people in indoor space [
1,
2,
3,
4], logistics and inventory [
5,
6,
7] or the monitoring of pipeline defects [
8] in order to improve performance and efficient productivity and to increase service quality. An RFID system typically consists of a reading device, i.e., an RFID reader with a set of antennas and RFID tags that store information about a product or service. A larger number of readers and tags together form a complex system for identifying, tracking and monitoring objects bearing RFID tags. In this paper, the focus is on passive RFID communication in the UHF band 860–960 MHz, where the energy to activate the RFID tag is obtained from the reader device. Thus, the reading area depends mainly on the power radiated by the reader, the sensitivity of the tags, the orientation of the antennas and the shape of the area of operation of the system [
9].
For passive UHF RFID systems, a difficult problem is to design the optimal placement of these RFID systems so that the desired area is completely covered by the signal. The tags have to be activated by the reader, and at the same time, there is no unwanted interference between the reader and the tags, which could lead to service degradation and reduced quality or error conditions. Another problem is the operation of the RFID system in the UHF band, where influences related to the environmental properties are typical and can have a strong impact on the performance of the system [
10]. Furthermore, when designing the system, the parameters of the reader, antenna and tags must be taken into account, as well as the practical implementation (cable lengths, availability of electricity, etc.) [
11]. Last but not least, other telecommunications technologies that can be operated in a given location in the same frequency spectrum should be considered to avoid undesired interference when designing an RFID system [
11].
For the design of the RFID system, in terms of the accuracy of the results, physical measurement or on-site experimentation, which allows for obtaining accurate values of the measured parameters, appears to be suitable. From the physical measurements, we can mention, for instance, the determination of the required power (strength of the electromagnetic field) of the antennas of RFID readers by placing the tag in the space and measuring their detectability by the reader. The values of the RSSI (Received Signal Strength Indicator) parameter of the tag response at a constant power of the RFID reader can be recorded in order to determine the reading range of RFID UHF readers or antennas [
11]. However, this procedure seems to be inappropriate in terms of time and money consumption. As a suitable solution, the use of simulation tools allow the placement of RFID components in 2D or 3D space. The simulation allows the implementation of various scenarios, such as the prediction of tag coverage (detectability), the effect of signal attenuation on obstacles, reflections from surfaces and others [
12]. Such simulations can then help, for instance, in tuning the performance of RFID readers and thus in estimating the signal range for tag activation. The results of these simulations can have comparable predictive value to physical measurements and can thus provide a basis for physical implementation.
Over the last decades, several methods have been proposed to simulate the propagation of electromagnetic waves ranging from extremely low-frequency (ELF) [
13] to terahertz waves [
14]. The authors of article [
15] divide these methods into three categories: empirical methods, deterministic methods (full-wave simulation) and ray tracing. Empirical methods, such as One-Slope [
16], Dual-Slope [
16], COST-231 [
16] or Okumura-Hata [
17], are based on a large number of measurements but may be inaccurate in the case of atypical spaces. For the application of RFID deployment in an indoor area, these methods lack spatial information and energy changes due to multipath propagation, which is very important for defining the tag readability area [
15]. Among the deterministic methods, Method of Moments (MoM) [
18], Finite-Difference Time-Domain (FDTD) numerical method [
19] and Finite Integration Technique (FIT) numerical method [
20] are mentioned. These methods are accurate but are computationally complex and time-consuming [
15]. As a compromise, the now widely used deterministic method ray tracing [
15,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30], more precisely, ray tracing (physics) (RT), is based on geometrical optics (GO). It is usable as an approximated method to estimate the intensity of an electromagnetic field [
21]. In this method, electromagnetic waves are treated as rays. The principle is based on emitting a certain number of rays from a source and tracking them. These then interact with obstacles in the form of refraction, diffraction and reflection depending on the material of the object, and so attenuation occurs at the obstacles [
21]. In an indoor environment, the material represents a large part of the influence on attenuation. In RT simulations, the material properties of all objects within the simulation are often taken into account based on the knowledge of the dielectric constant and permittivity in the range of operating frequencies [
31]. For instance, the authors in [
32] discuss the calibration of ray tracing models based on measurements of permittivity and conductivity in the indoor environment. The limitations of this method are mainly the number of rays emitted and the size of the surfaces on which the rays hit and on which the resulting intensity is subsequently calculated and correlated. In the first case, the calculation time increases with an increasing number of rays, and in the second case, inaccuracy in the calculation may occur due to the different number of incident rays [
33].
RT is a frequency-independent and widely used method for 2D and 3D radio coverage prediction. Therefore, it is often implemented as a feature in software tools. Some of the frequently used tools include Altair WinProp [
34], Wireless InSite [
35] and Altair Feko [
36]. The authors of [
37] use a combination of Altair Feko and Altair WinProp to predict the coverage of an indoor RFID infrastructure. The authors of [
21] study the coverage of UHF-RFID tags at 433 MHz in an indoor environment using Altair WinProp. The authors of [
22] use Wireless InSite as a 3-D ray-tracer to evaluate the proposed tag placement algorithm for THz RFID. The papers are categorized in
Table 1.
An analog of the physical ray tracing method is encountered in the domain of computer graphics as a technique for generating images in computer graphics. It belongs to the group of so-called global illumination algorithms, further referred to as ray tracing (graphics) (RTg). This method can be considered as a possible approach to predict the coverage of the radio signal in the graphics domain. The equation that describes the propagation of light in a 3D scene (i.e., the rendering equation) was published by James T. Kajiya in 1986 in [
38].
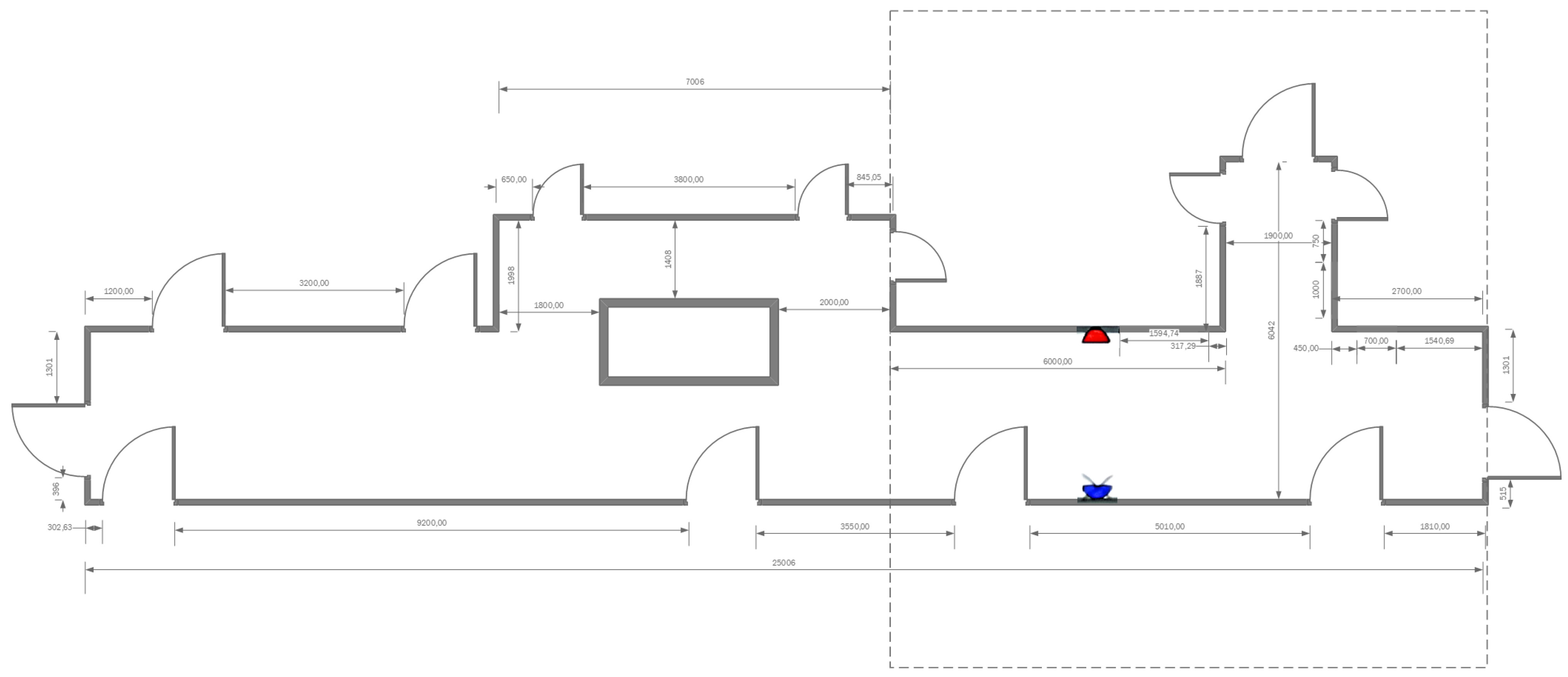
The aim of this paper is the verification of the use of the RTg algorithm for the simulation of radio signal propagation in a 3D indoor environment for UHF RFID technology. The investigation of this approach is the main contribution of the paper because the RTg algorithm solves the global illumination problem in the domain of computer graphics by default. In the simulation, the effect of reflections and refractions, where some parameters, such as the shape of the 3D environment and the influence of materials, are considered. The simulation results of this approach are compared with the results of simulations of the empirical Multi-Wall model used in the simulation tool I-Prop [
11]. For the presented approach, we focus on verifying the functionality, repeatability, accuracy of the results and time consumption.
Considering the simulation results, it can be concluded that this approach is applicable to simulate the UHF signal coverage from an RFID reader in an indoor environment. The authors of [
11] compare the results of the Multi-Wall model with the real measurement results. Based on the
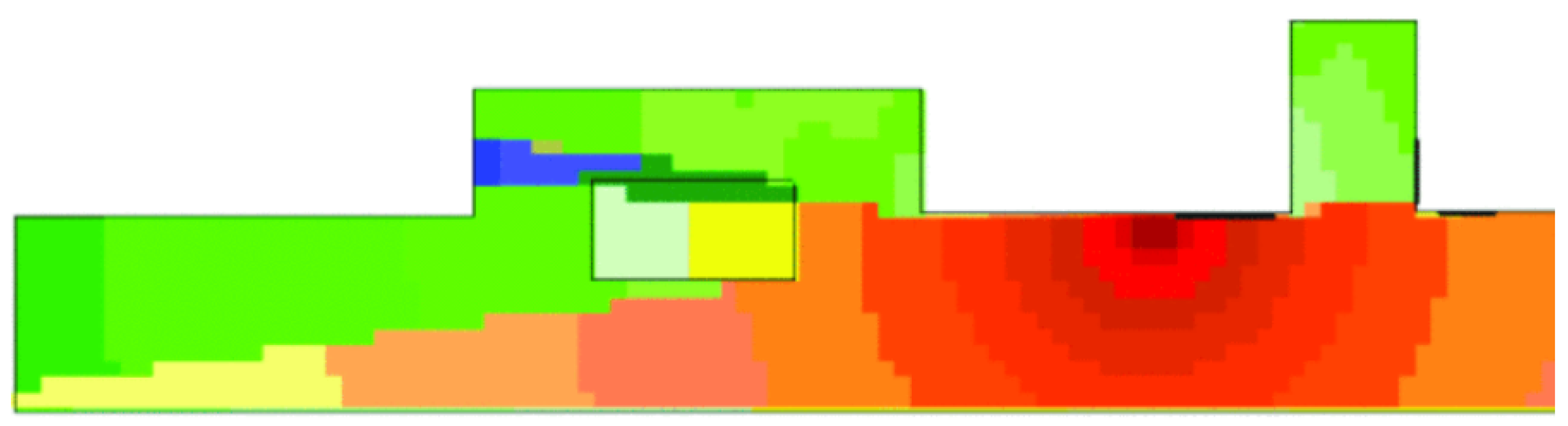
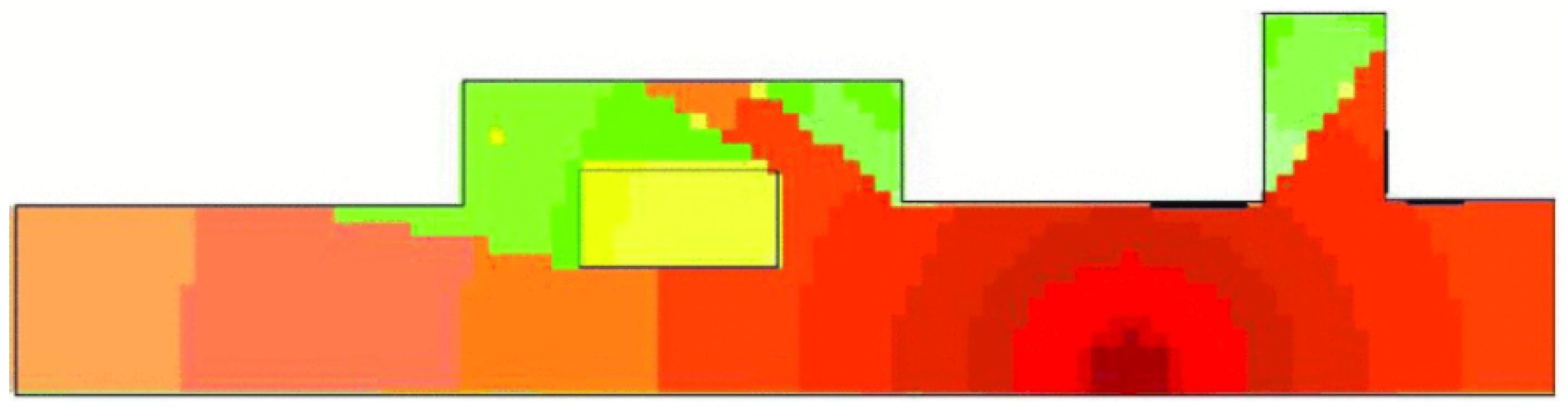
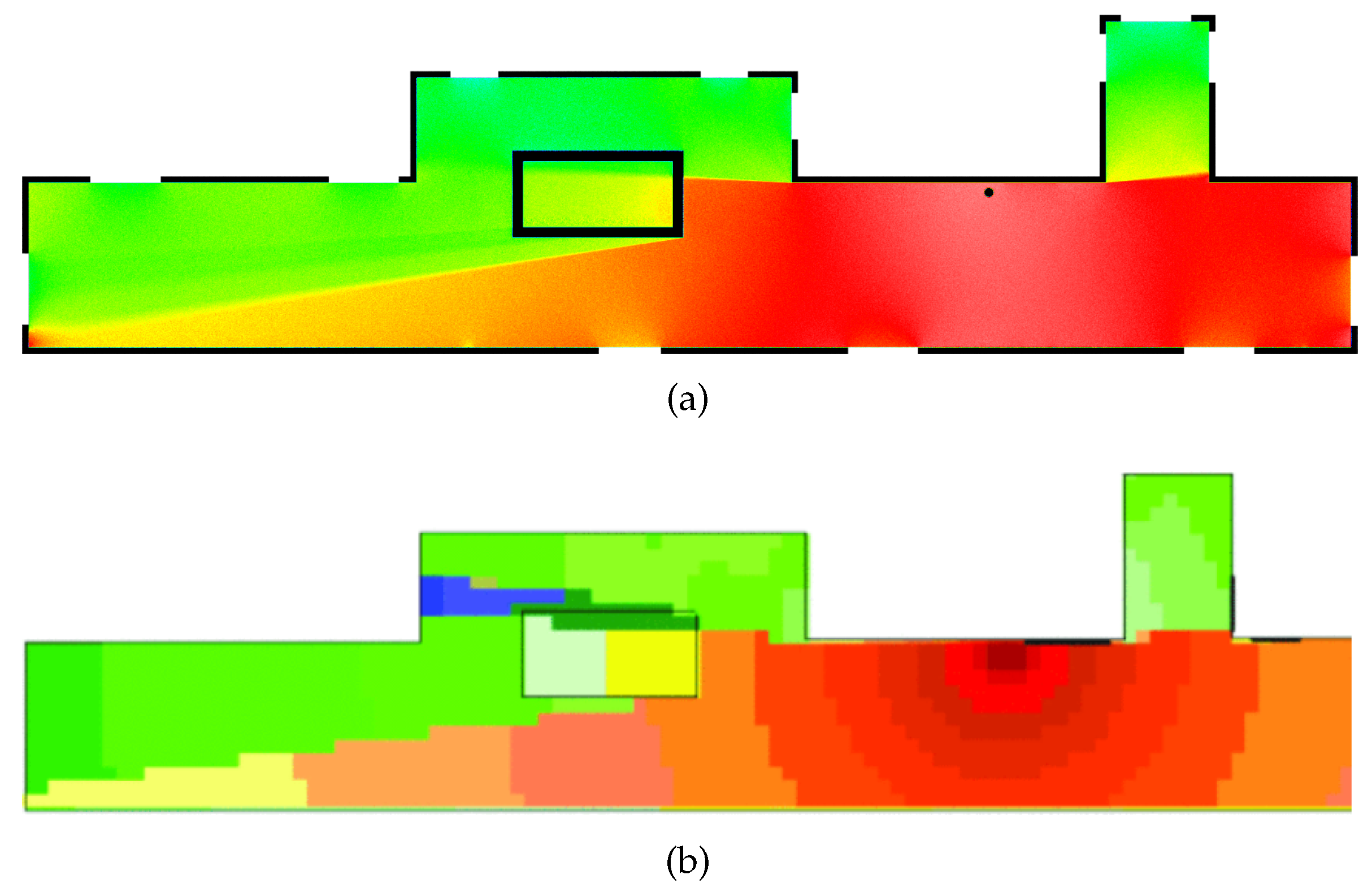
p-value in the ANOVA table being less than 0.01, the authors conclude a statistically significant relationship between the results. Comparing the two original and two simulated heat maps, the maximum difference is 6.7% in the range of RSSI values −20 to −30 dBm for antenna 1. In terms of the highest and lowest differences for RSSI ranges, it is 6.5% in the range −1 to −20 dBm and 0.9% in the range −80 to −100 dBm for antenna 1. The total time to create the simulated environment is less than 10 min and the simulation time to create the heat map is less than 1 min.
The rest of this paper is structured as follows:
Section 2 describes the approach to the simulation with all the required settings. The results from the heat map comparison and the discussion of functionality, repeatability, accuracy of the results and time consumption of this approach are presented in
Section 3. The conclusion of this paper is presented in
Section 4.
4. Conclusions
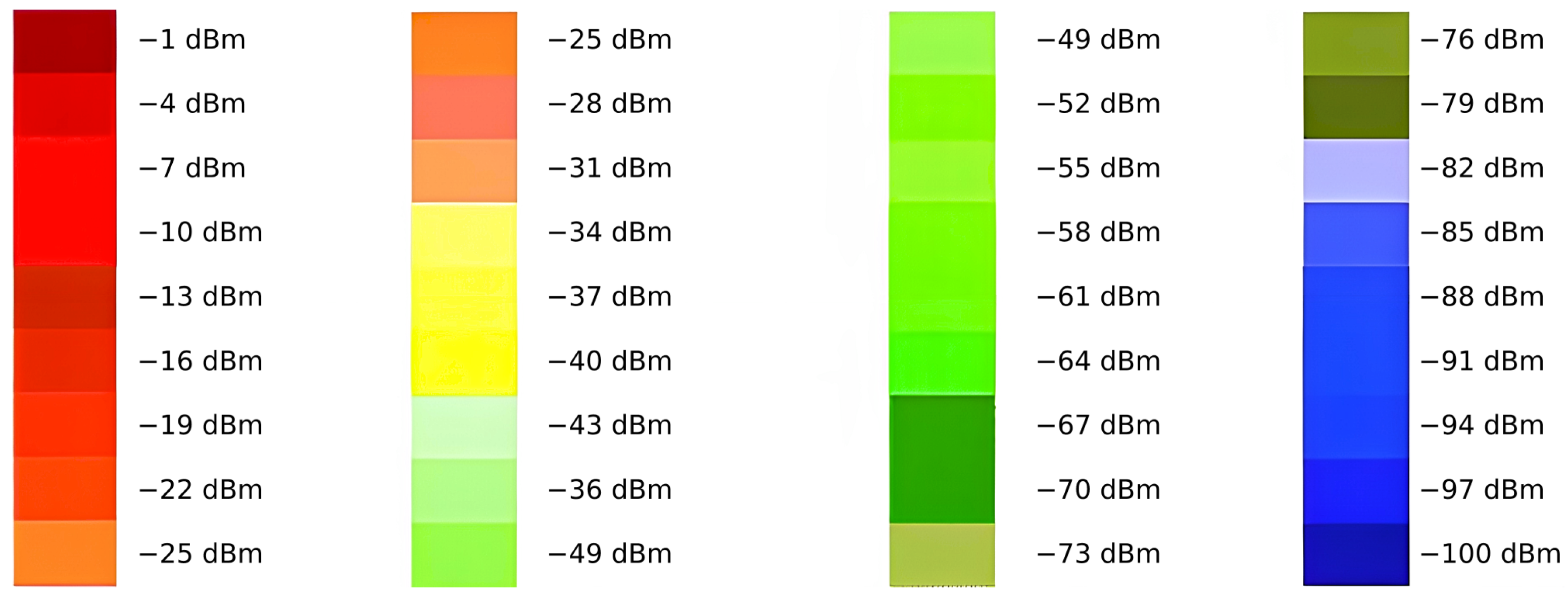
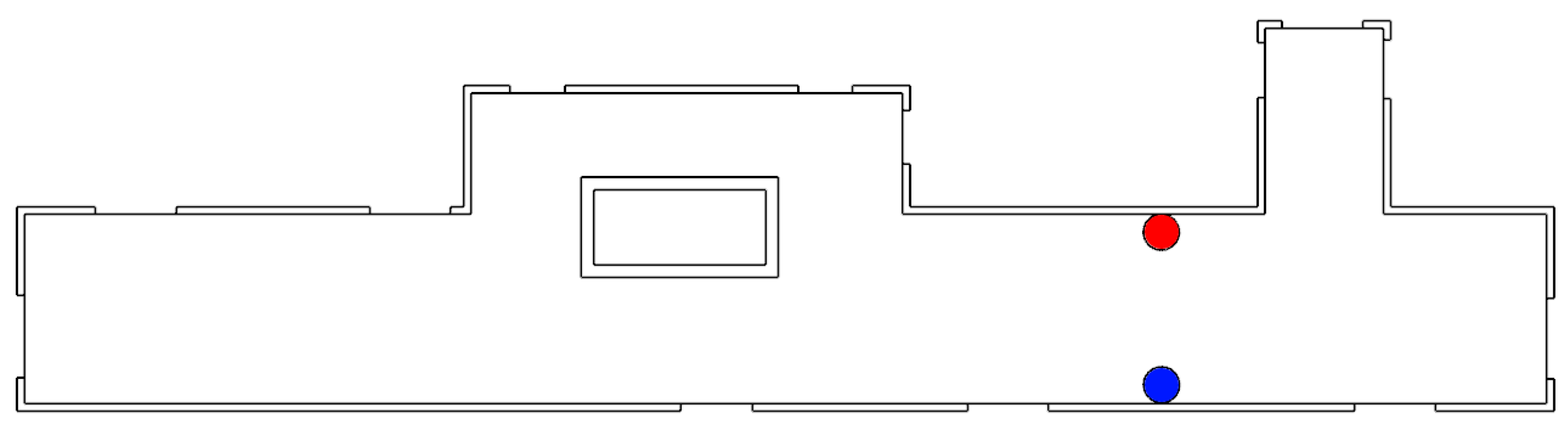
In this paper, the approach for simulation of radio signal propagation for passive UHF RFID technology in an indoor environment using the RTg method is proposed. Using a combination of the 3D modeling tool SketchUp and the V-Ray plugin for computer rendering of images, the use of the RTg method to render a heat map over a 2D floor plan in a 3D scene is demonstrated. The heat map thus presents the signal intensity in the environment as RSSI values. This approach has the potential to reduce the time and cost requirements for planning an RFID system infrastructure. It also provides a comprehensive view of the signal range in a real environment, which can improve the approach to the coexistence of multiple telecommunication technologies in a given environment.
A comparison of the RTg method with the Multi-Wall method and its verification based on the comparison of visual results of heat maps over a 2D plan in a 3D environment is presented. Two heat maps are generated in one environment for two different antenna locations, i.e., antennas 1 and 2. The largest difference of 6.7% is achieved for the RSSI value range of −20 to −30 dBm. The difference of 6.5% is achieved for the range of −1 to −20 dBm. These differences come at the strongest signal. Hence they have practically no effect on the functionality of the RFID system. We believe that this difference is negligible from a practical point of view. Practically, the most interesting results are the RSSI levels at which the signal is lost or almost lost. The maximum difference for the lowest RSSI range, i.e., −80 to −100 dBm, is 0.9% for antenna 1.
In terms of time, the entire simulation up to the resulting heat map can be created in 10 min. However, this strongly depends on the complexity of the scene and the number of signal sources. It is affected by the increase in time required to create a 3D model and the time required to calculate reflections and refractions from a larger number of objects.
Although this approach shows results comparable to other methods for radio signal prediction, further experimental investigation is needed. One possible goal is to make corrections to the set parameters in this approach based on real measurements or a larger number of validated simulation results. Furthermore, there is a need to minimize the time to create a 3D scene, which increases significantly with the complexity of the floor plan. Furthermore, the position and rotation of the RFID tag relative to the RFID antenna need to be considered, which is not currently accounted for in this approach. A future extension of this study should focus on the interpretation of signal strength in notional 3D space, e.g., by layering surfaces so that the three-dimensionality is not lost. This extension would also contribute significantly to the analysis of tag detectability for different locations in the indoor environment.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}