
A Three-Port Power Electronic Transformer Based on Magnetic Integration

Abstract
:1. Introduction
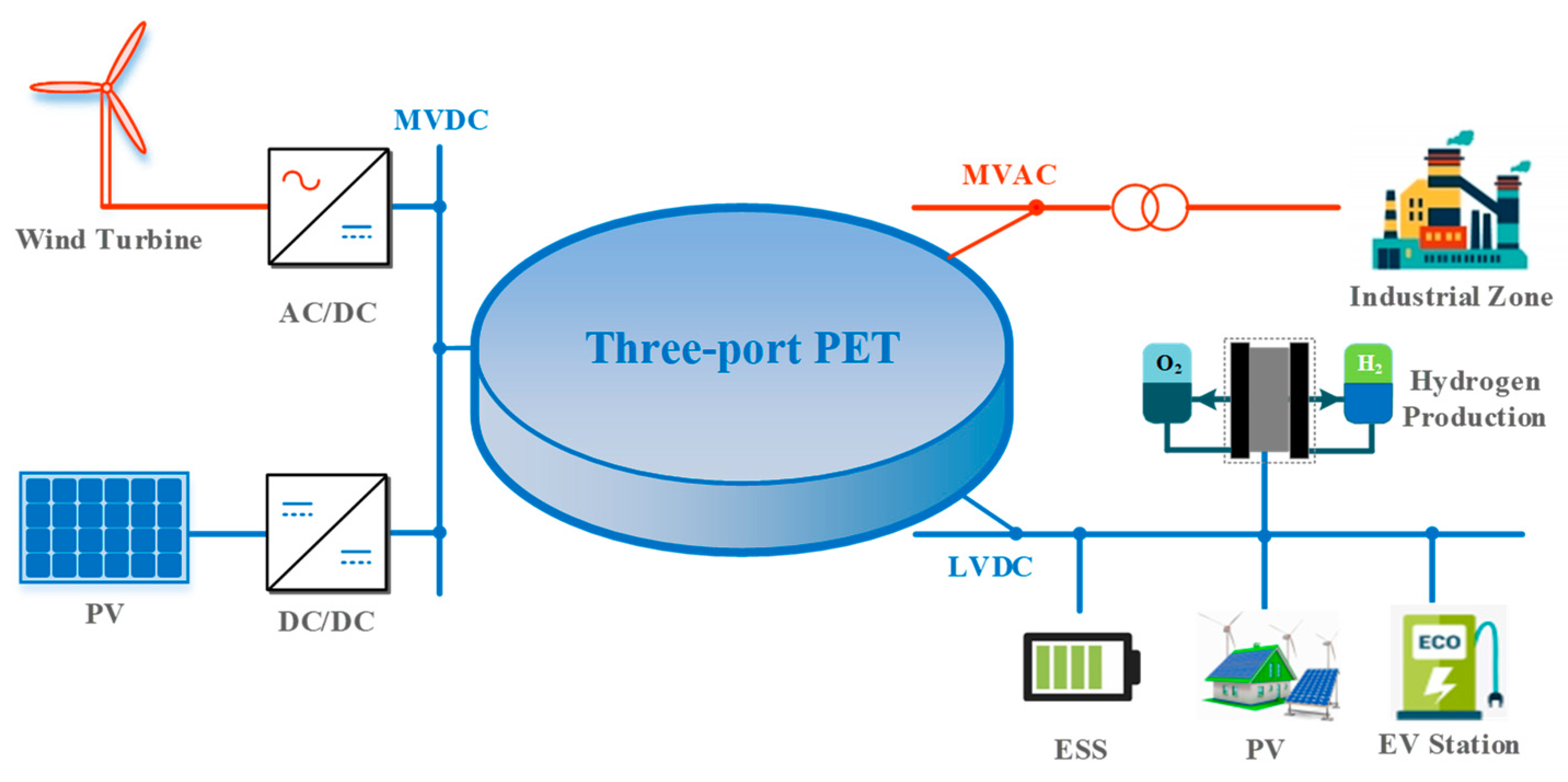
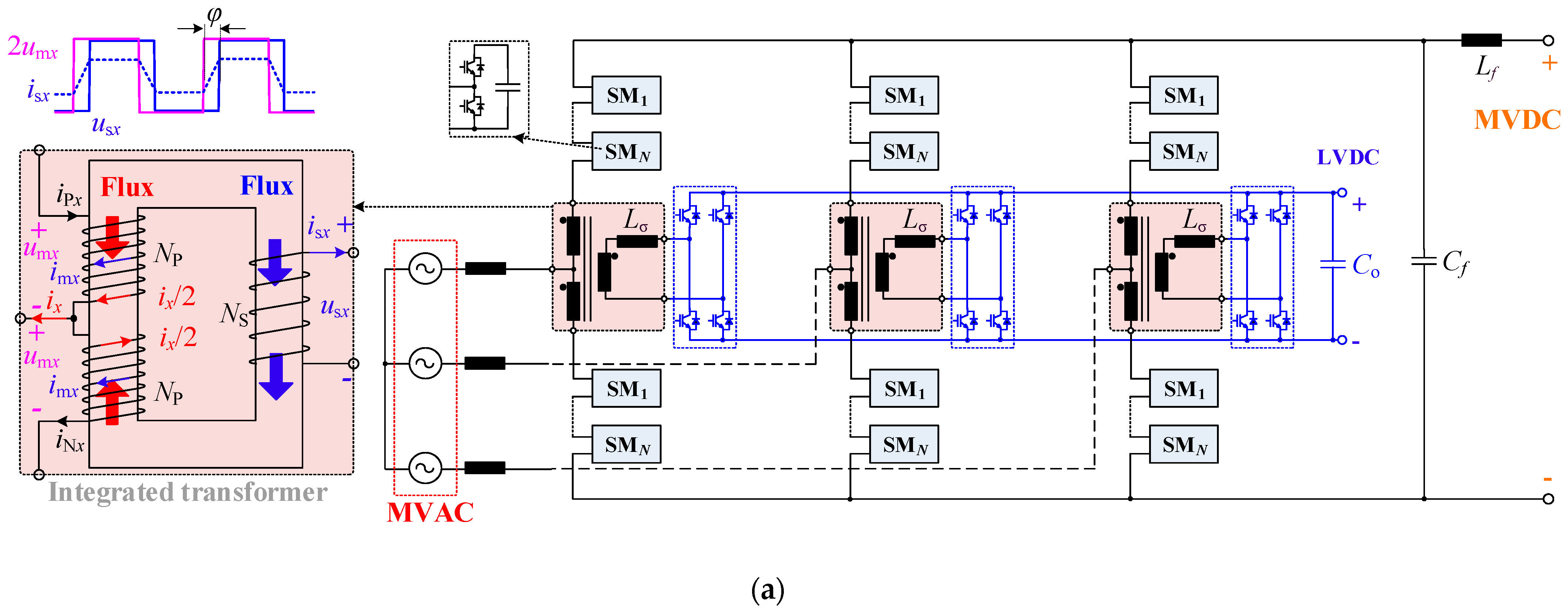
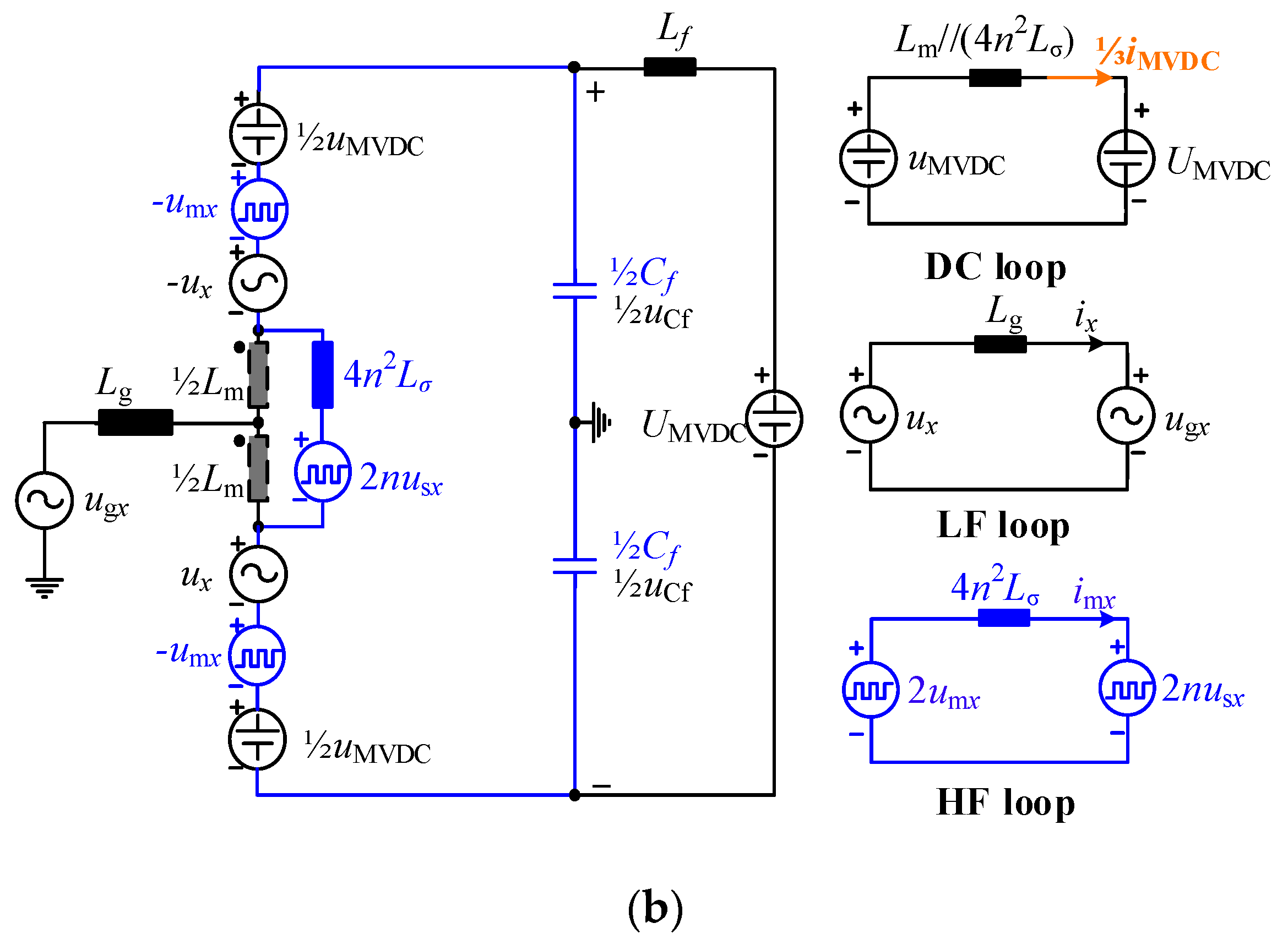
2. Description of the Proposed PET Topology
3. Key Parameters Design
3.1. Turn Ratio of Integrated Transformer
3.2. Leakage Inductance of Integrated Transformer
3.3. Magnetizing Inductance of Integrated Transformer
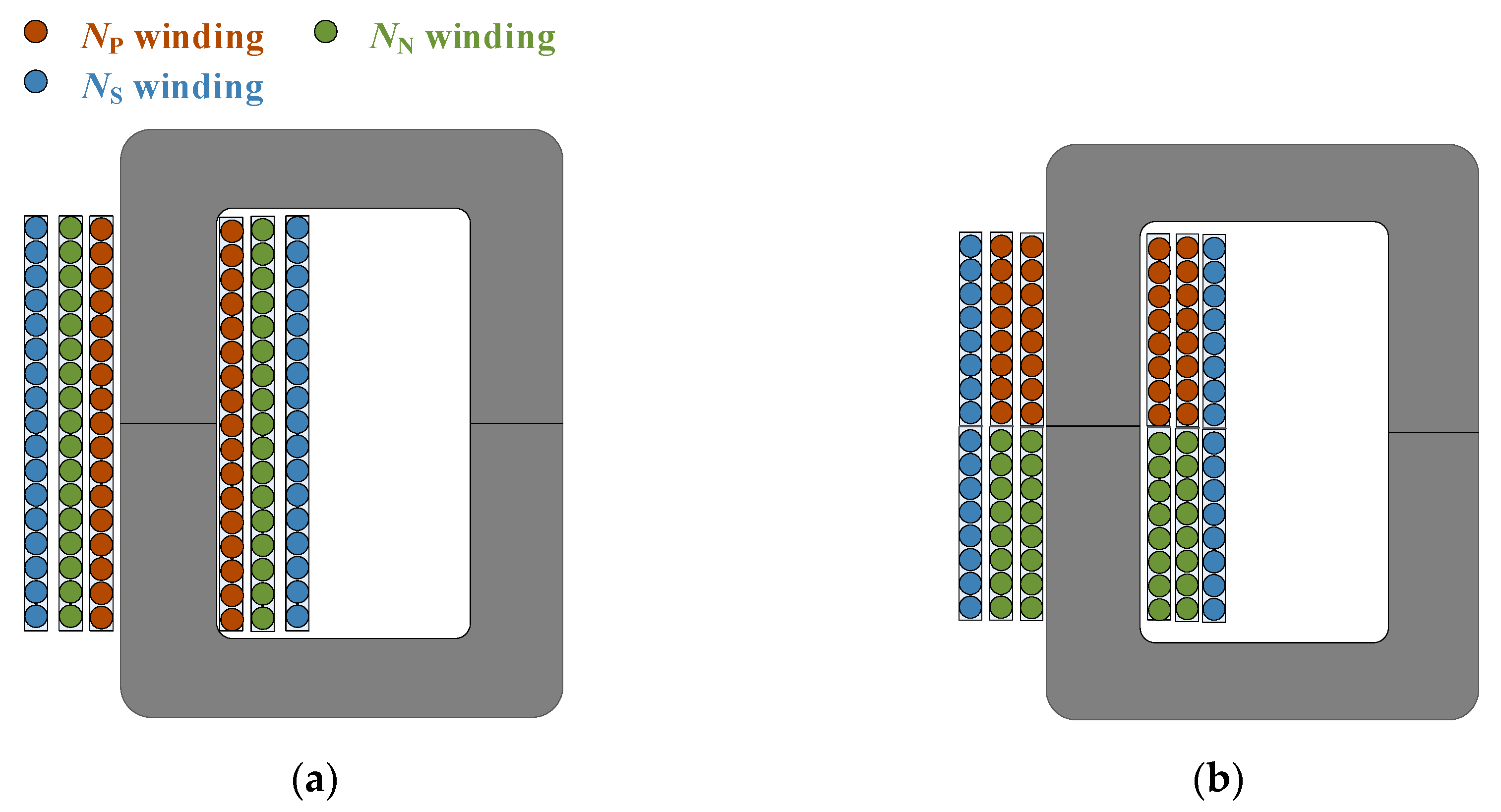
3.4. Winding Arrangement
3.5. MVDC Filter
3.6. SM Capacitors
4. Control Implementation
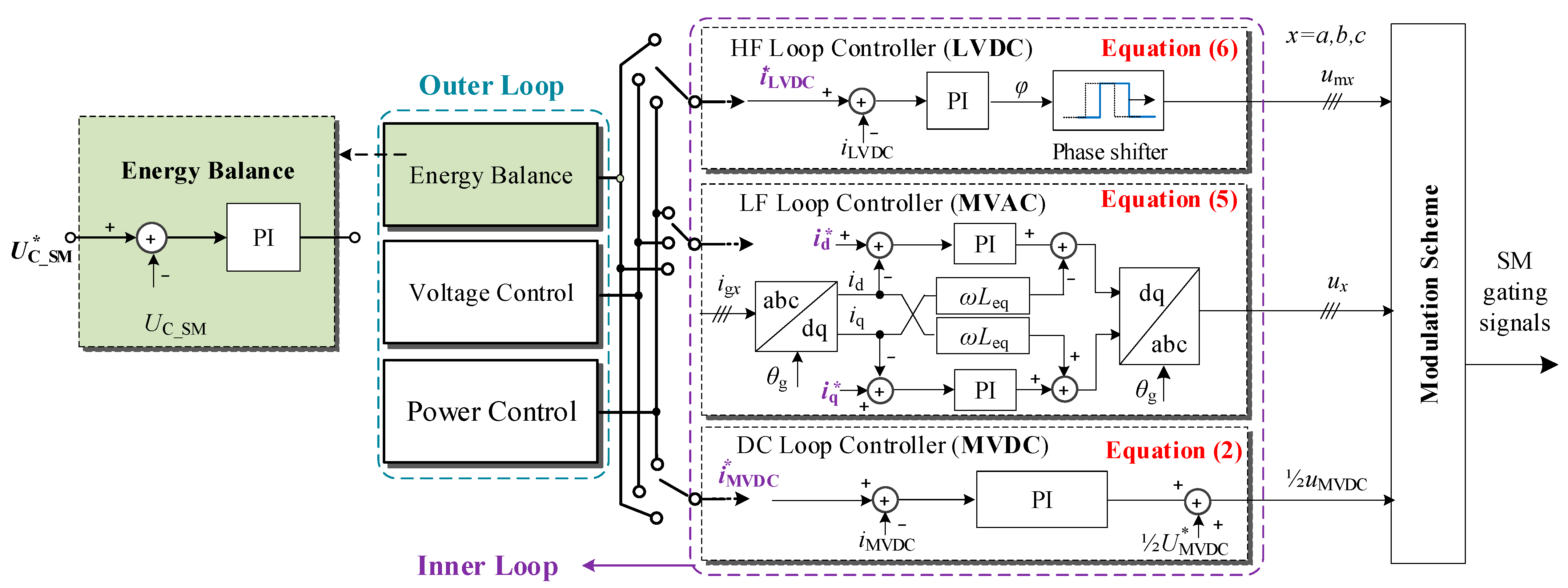
4.1. Multi-Port Control Strategy
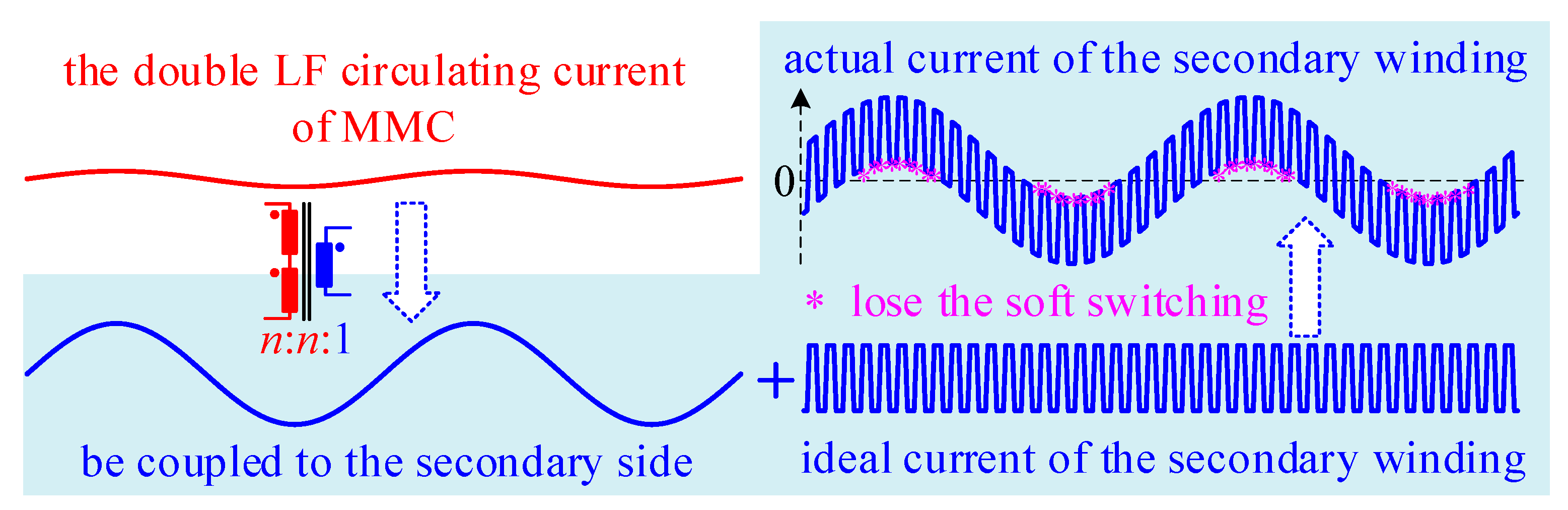
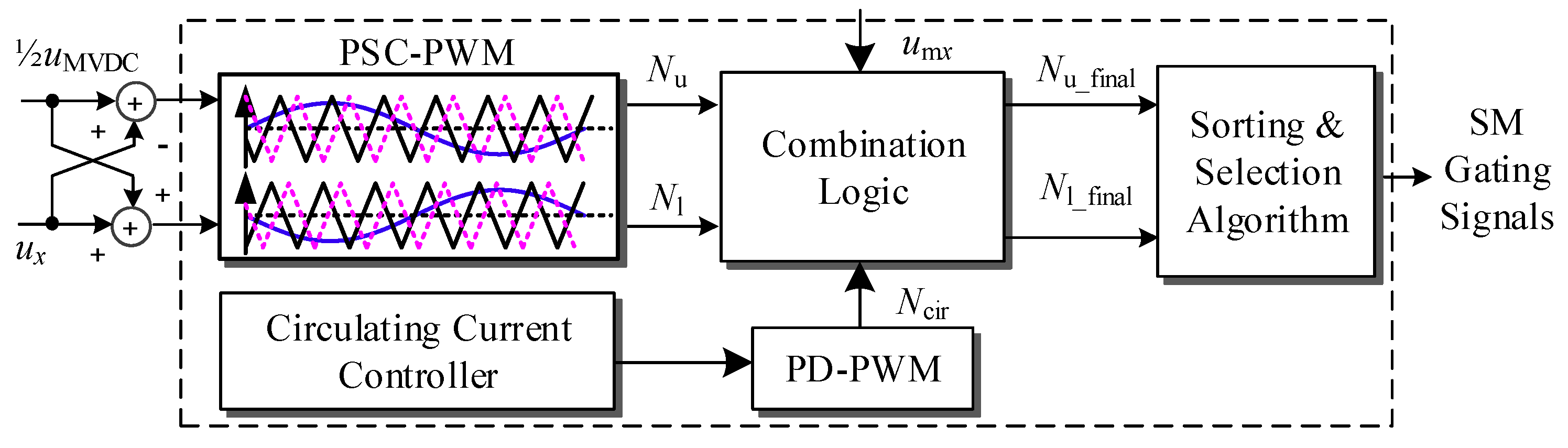
4.2. Modulation Scheme
5. Simulation and Experiment Verification
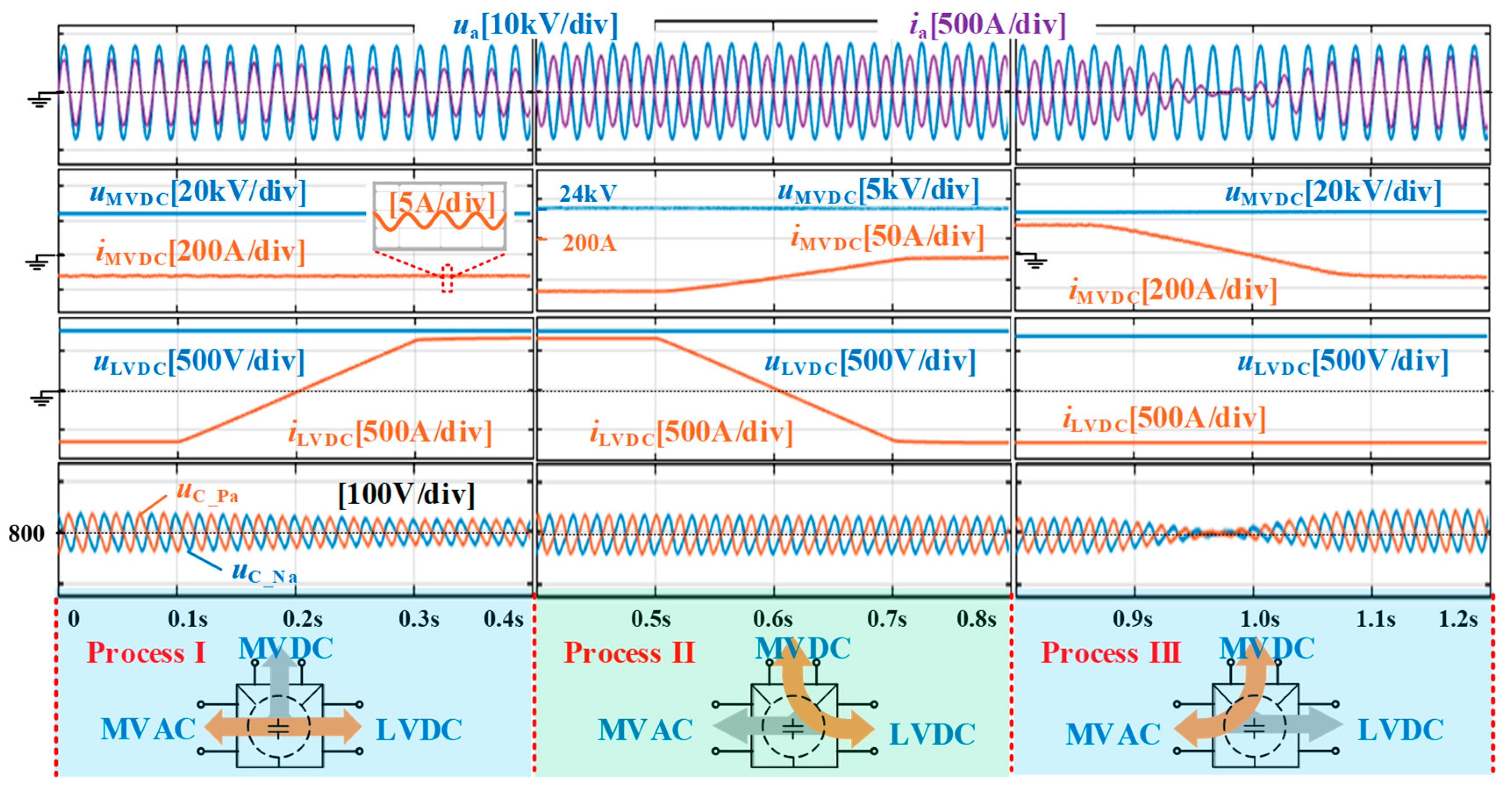
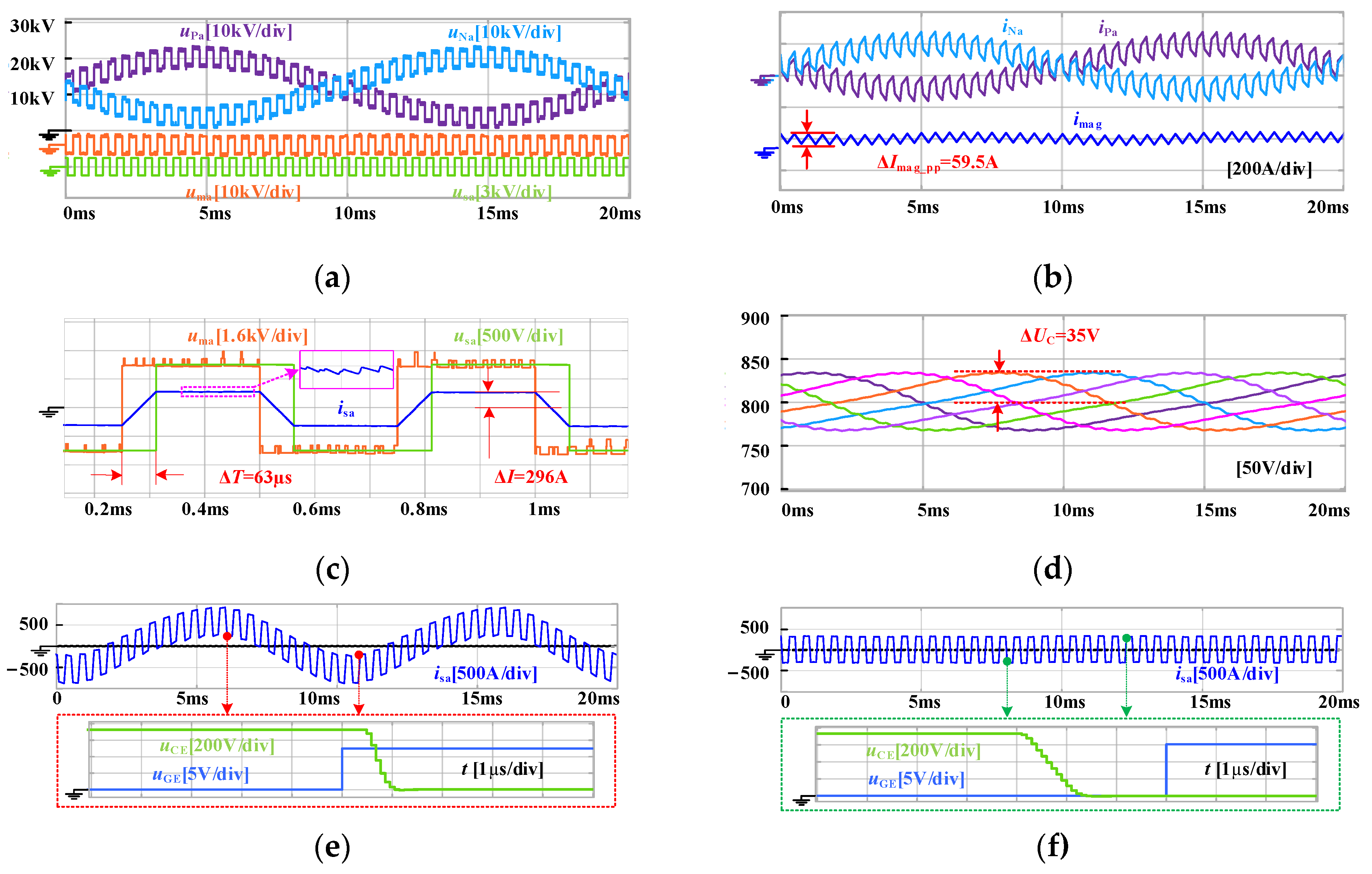
5.1. Simulation Verification
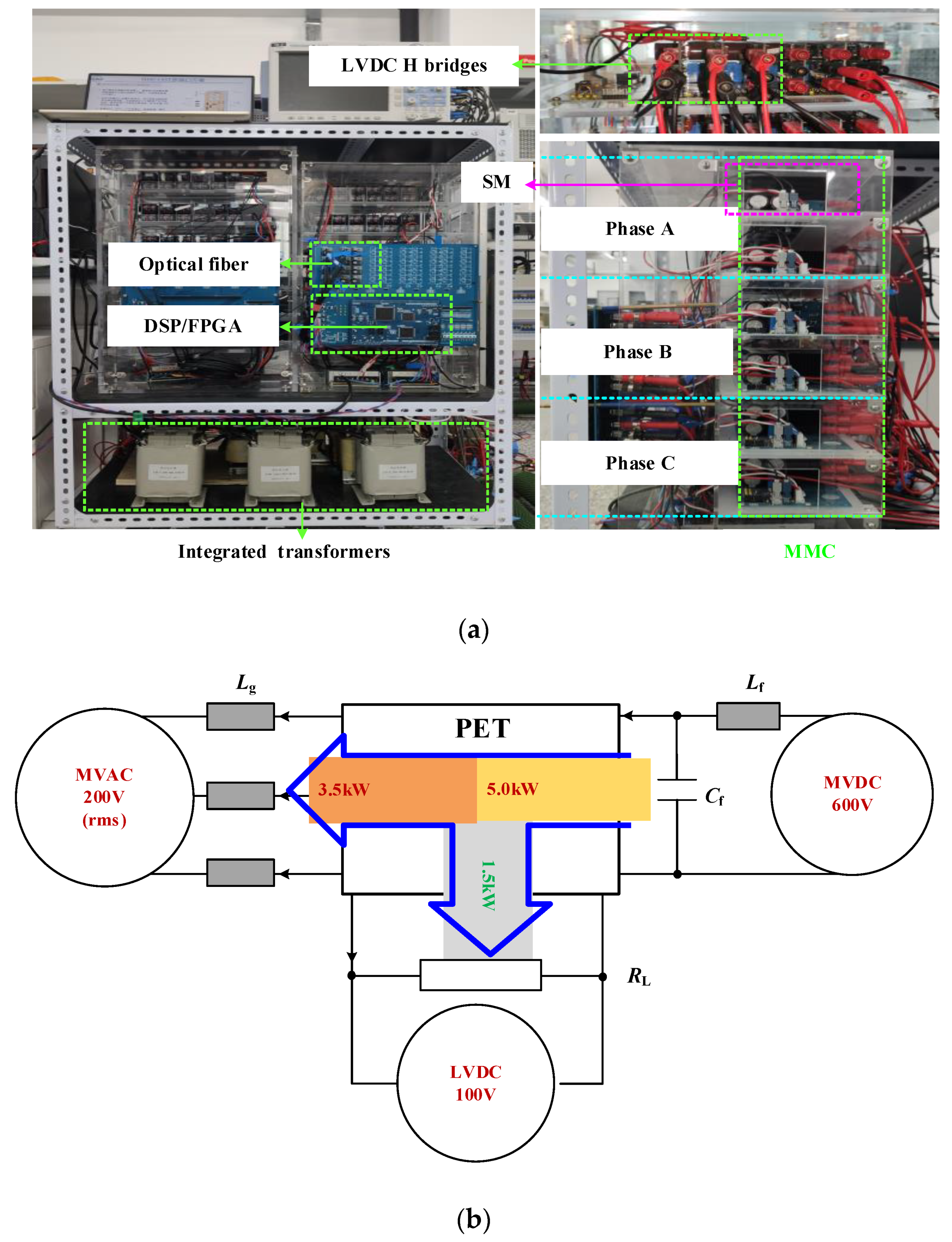
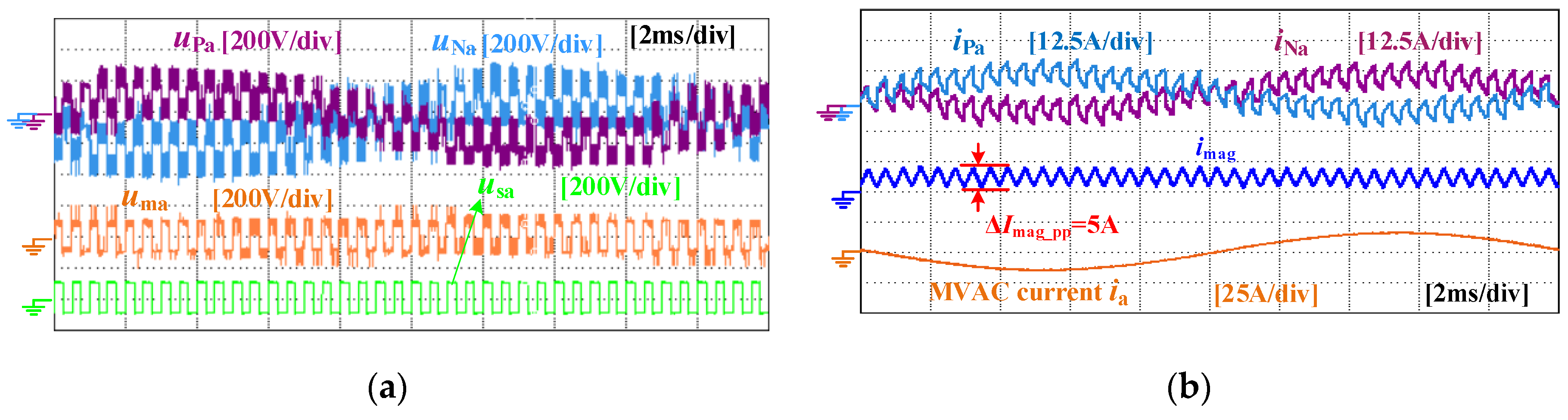
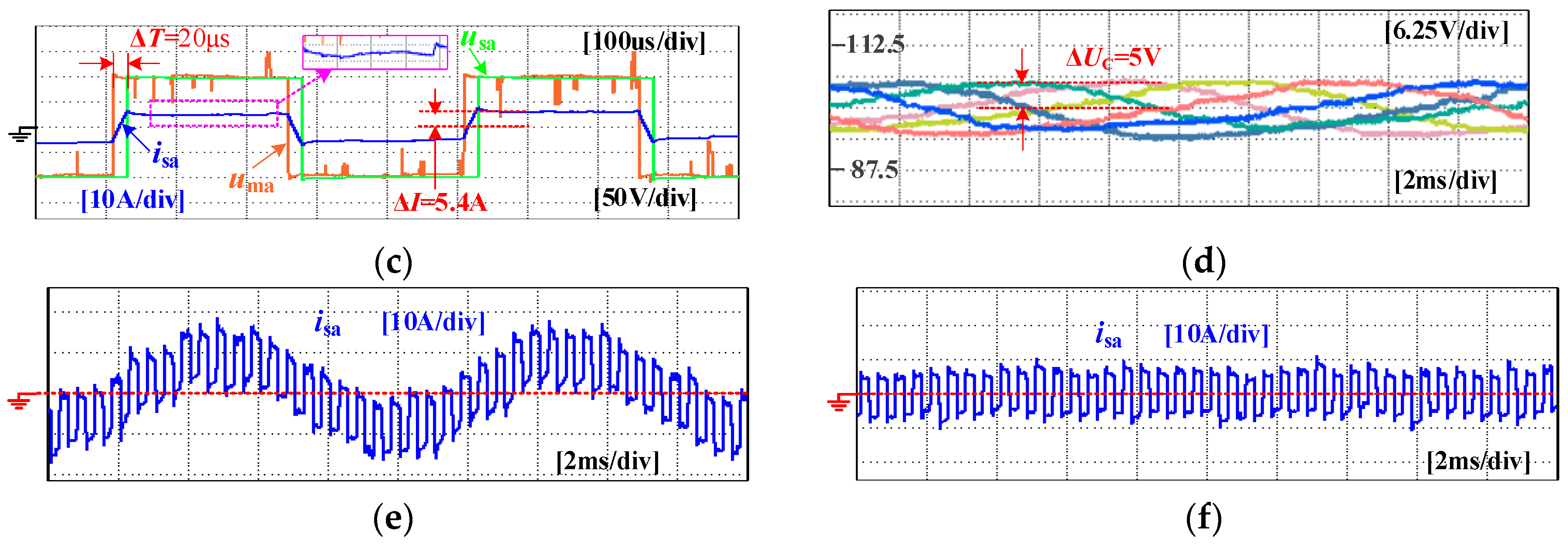
5.2. Experiment Verification
6. Economic Benefits Analysis
6.1. Magnetic Volume Comparison
6.2. Device Cost Comparison
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huber, J.E.; Kolar, J.W. Applicability of solid-state transformers intoday’s and future distribution grids. IEEE Trans. Smart Grid 2019, 10, 317–326. [Google Scholar] [CrossRef]
- Gorla, N.B.Y.; Kolluri, S.; Chai, M.; Panda, S.K. A comprehensive harmonic analysis and control strategy for improved input power quality in a cascaded modular solid state transformer. IEEE Trans. Power Electron. 2019, 34, 6219–6232. [Google Scholar] [CrossRef]
- Nie, J.; Yuan, L.; Wen, W.; Duan, R.; Shi, B.; Zhao, Z. Communication independent power balance control for solid state transformer interfaced multiple power conversion systems. IEEE Trans. Power Electron. 2020, 35, 4256–4271. [Google Scholar] [CrossRef]
- Sun, X.; Teng, J.; Bu, Z.; Pan, Y.; Zhao, W.; Li, X. Research on triple-port SST scheme based on the natural elimination of MMC sub-modules voltage fluctuation and imbalance. IEEE Trans. Emerg. Sel. Topics Power Electron. 2021, 10, 3697–3710. [Google Scholar] [CrossRef]
- Wen, W.; Li, K.; Zhao, Z.; Yuan, L.; Mo, X.; Cai, W. Analysis and control of a four-port megawatt-level high-frequency-bus-based power electronic transformer. IEEE Trans. Power Electron. 2021, 36, 13080–13095. [Google Scholar] [CrossRef]
- Li, K.; Wen, W.; Zhao, Z.; Yuan, L.; Cai, W.; Mo, X.; Gao, C. Design and implementation of four-port megawatt-level high-frequency-bus based power electronic transformer. IEEE Trans. Power Electron. 2021, 36, 6429–6442. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, J.; Wang, J.; Zang, J.; Shi, G.; Feng, X.; Cai, X. Design and control of power fluctuation delivery for cell capacitance optimization in multiport modular solid-state transformers. IEEE Trans. Power Electron. 2021, 36, 1412–1427. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Chu, Z.; Zhu, H.; Sun, Z.; Li, Y. A three-phase 10 kVAC-750 VDC power electronic transformer for smart distribution grid. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–9. [Google Scholar]
- Gao, F.; Li, Z.; Wang, P.; Xu, F.; Chu, Z.; Sun, Z.; Sun, Z.; Li, Y. Prototype of smart energy router for distribution DC grid. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–9. [Google Scholar]
- Ma, D.; Chen, W.; Shu, L.; Qu, X.; Hou, K. A MMC-based multiport power electronic transformer with shared medium-frequency transformer. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 727–731. [Google Scholar] [CrossRef]
- Ma, D.; Chen, W.; Shu, L.; Qu, X.; Zhan, X.; Liu, Z. A multiport power electronic transformer based on modular multilevel converter and mixed-frequency modulation. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 1284–1288. [Google Scholar] [CrossRef]
- Zheng, G.; Chen, Y.; Kang, Y. A modular multilevel converter (MMC) based solid-state transformer (SST) topology with simplified energy conversion process and magnetic integration. IEEE Trans. Ind. Electron. 2021, 68, 7725–7735. [Google Scholar] [CrossRef]
- Zheng, G.; Chen, Y.; Kang, Y. Modeling and control of the modular multilevel converter (MMC) based solid state transformer (SST) with magnetic integration. CES Trans. Electric. Machines Syst. 2020, 4, 309–318. [Google Scholar] [CrossRef]
- Pereira, T.; Hoffmann, F.; Zhu, R.; Liserre, M. A comprehensive assessment of multiwinding transformer-based DC–DC converters. IEEE Trans. Power Electron. 2021, 36, 10020–10036. [Google Scholar] [CrossRef]
- Reddy, G.A.; Shukla, A. Circulating current optimization control of MMC. IEEE Trans. Power Electron. 2021, 68, 2798–2811. [Google Scholar] [CrossRef]
- Li, B.; Han, L.; Mao, S.; Zhou, S.; Qu, Z.; Xu, D. Decoupled modulation scheme for modular multilevel converters in medium-voltage applications. IEEE Trans. Power Electron. 2020, 35, 11430–11441. [Google Scholar] [CrossRef]
- McLyman, C.W.T. Transformer and Inductor Design Handbook, 4th ed.; CRC Press: New York, NY, USA, 2011. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Simulation Value | Experiment Value |
|---|---|---|
| Line-to-line RMS voltage of MVAC | 10 kV | 200 V |
| Rated MVDC voltage | 24 kV | 600 V |
| Rated LVDC voltage | 750 V | 100 V |
| Line MVAC inductance Lg | 10 mH | 2 mH |
| Rated SM capacitor voltage USM | 800 V | 100 V |
| MMC SM capacitor CSM | 5.5 mF | 2 mF |
| Number of SM per arm n | 30 | 6 |
| Magnetizing inductance of HF transformer Lm | 20 mH | 10 mH |
| Leakage inductance of HF transformer Lσ | 158.2 µH | 368 µH |
| Switching frequency of SM fs | 1 kHz | 6 kHz |
| Frequency of injected HF voltage | 2 kHz | 2 kHz |
| HF transformer turn ratio n:n:1 | 3.2:3.2:1 | 1:1:1 |
| MVDC inductance Lf | 600 µH | 100 µH |
| MVDC capacitor Cf | 30 µF | 30 µF |
| Parameters (Kvol =17.9, Kf = 4, KW = 0.4, Jrms = 50A, Bmax = 1T, fm = 2 kHz, n = 30) | CHB + Common HF Bus PET | MMC + Distributed DABs PET | MMC + ISOP DABs PET | Proposed PET |
|---|---|---|---|---|
| Transformers volume | 10.64 m3 | 1.46 m3 | 0.93 m3 | 1.02 m3 |
| Arm inductors volume | 0.99 m3 | 1.94 m3 | 1.94 m3 | —— |
| Total magnetic volume | 11.63 m3 | 3.40 m3 | 2.87 m3 | 1.02 m3 |
| Parameters | MMC + Distributed DABs PET | Proposed PET |
|---|---|---|
| Current stress of MMC device | (199A) | (275A) |
| Number, product type and costs of MMC IGBTs | 6 N FF200R12KE4 180 × $112 = $20,160 | 6 N FF300R12KE4 180 × $135 = $24,300 |
| Current stress of DABs device (φ = π/4) | (4.9A) | (296A) |
| Number, product type and costs of DABs IGBTs | 6 N × 4 FF50R12RT4 720 × $46 = $33,120 | 3 × 2 FF300R12KE4 6 × $135 = $810 |
| Number, product type and costs of IGBTs drivers | 6 N + 6 N × 4 2SP0115T2C0-12 900 × $87 = $78,300 | 6 N + 3 × 2 2SP0115T2C0-12 186 × $87 = $16,182 |
| Number, product type and costs of MMC SMs capacitors (5.5 mF per SM) | 6 N × 5 947D112K102DLRSN (1.1 mF) 900 × $172 = $154,800 | 6 N × 5 947D112K102DLRSN (1.1 mF) 900 × $172 = $154,800 |
| DAB capacitor (@ voltage ripple ε = 2%) | (62 µF) | (3700 µF) |
| Number, product type and costs of DAB capacitors | 6 N × 1 C4DRMAQ5600AA0J (68 µF) 180 × $55 = $9900 | 3 × 4 947D102K102DJRSN (1 mF) 12 × $161 = $1932 |
| Number, product type and costs of fiber communication (4 ICs per SM or DAB) | (6 N + 6 N) × 4 HFBR1521z/HFBR2521z 1440 × $8 = $11,520 | (6 N + 3) × 4 HFBR1521z/HFBR2521z 732 × $8 = $5856 |
| Number, product type and costs of auxiliary power supply (1 modules per SM or DAB) | 6 N + 6 N PV40-27B12 360 × $30 = $10,800 | 6 N + 3 PV40-27B12 183 × $30 = $5490 |
| Number, product type and costs of A/D sampling (1 IC per SM or DAB) | 6 N + 6 N AD7606BSTZ-4RL & ADR421 360 × $24 = $8640 | 6 N + 3 AD7606BSTZ-4RL & ADR421 183 × $24 = $4392 |
| Number, product type and costs of voltage transducer (1 voltage transducer per SM or DAB) | 6 N + 6 N LEM DVL 1000 360 × $252 = $90,720 | 6 N + 3 LEM DVL 1000 183 × $252 = $46,116 |
| Number, product type and costs of controller IC (1 CPLD/FPGA IC per SM or DAB) | 6 N + 6 N EPM1270 360 × $38 = $13,680 | 6 N + 3 EPM1270 183 × $38 = $6954 |
| Number and costs of copper busbar (n + 1 busbar per arm, 4 busbar per DAB) | 6(n + 1) + 6 N × 4 906 × $35 = $31,710 | 6(n + 1) + 3 × 2 192 × $35 = $6720 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, Z.; Jiao, Y.; Suo, Z.; Li, B.; Zhao, X.; Han, L.; Xu, D. A Three-Port Power Electronic Transformer Based on Magnetic Integration. Appl. Sci. 2022, 12, 11607. https://doi.org/10.3390/app122211607
Liao Z, Jiao Y, Suo Z, Li B, Zhao X, Han L, Xu D. A Three-Port Power Electronic Transformer Based on Magnetic Integration. Applied Sciences. 2022; 12(22):11607. https://doi.org/10.3390/app122211607
Chicago/Turabian StyleLiao, Zhixian, Yingzong Jiao, Zhiwen Suo, Binbin Li, Xiaodong Zhao, Linjie Han, and Dianguo Xu. 2022. "A Three-Port Power Electronic Transformer Based on Magnetic Integration" Applied Sciences 12, no. 22: 11607. https://doi.org/10.3390/app122211607
APA StyleLiao, Z., Jiao, Y., Suo, Z., Li, B., Zhao, X., Han, L., & Xu, D. (2022). A Three-Port Power Electronic Transformer Based on Magnetic Integration. Applied Sciences, 12(22), 11607. https://doi.org/10.3390/app122211607