
Back Analysis of Geotechnical Engineering Based on Data-Driven Model and Grey Wolf Optimization
Abstract
:1. Introduction
2. Reduced-Order Model
2.1. Constructing the ROM Model
2.2. Predicting the Field Variables
2.3. Procedure of the ROM Model
- Step 1: Collect the data of the geotechnical engineering, including project property, geo-stress, boundary conditions, etc.;
- Step 2: Establish the numerical model (FEM) based on the above engineering information;
- Step 3: Construct the design variables set θ for the numerical model using LHS;
- Step 4: Calculate the field variables wi (displacement or stress field) at space domain X using a numerical method for each design variable. Collect all the field variables and acquire the snapshots;
- Step 5: Build the spatial Gram matrix Mx based on the above snapshots;
- Step 6: Solve the eigenvalues λ and eigenvectors r based on the spatial Gram matrix;
- Step 7: Determine the rank number K of Mx and the first K eigenfunction vector φ;
- Step 8: Determine the undetermined coefficient β based on eigenfunction vector φ and snapshots;
- Step 9: To a new design variable θ, construct element ɸ based on the design variables θ generated by LHS using the RBF function;
- Step 10: Determine the interpolation matrix A of elements ɸ;
- Step 11: Determine the vector of element α using the penalized linear systems;
- Step 12: Solve the coefficients β(θ) based on the RBF function;
- Step 13: Calculate the unknown field variables based on coefficients β(θ) and eigenfunction vector φ using the ROM.
3. Grey Wolf Optimization (GWO)
4. ROM-Based Back Analysis Using GWO
4.1. Back Analysis
4.2. ROM-Based Surrogate Model
4.3. Objection Function
4.4. Procedure of the Developed Framework
- Step 1: Collect the engineering data, such as the unknown (need to determine by back analysis) and known geomaterial mechanical and physical properties, boundary conditions, and the range of unknown geomaterial properties;
- Step 2: Generate the combination of the unknown properties based on experimental design and calculate the structural response at each training sample. The snapshots consist of the combination of the unknown parameters and the corresponding response;
- Step 3: Based on the determined snapshots, generate the ROM to capture the nonlinear function mapping between the geomaterial properties and the corresponding structural response in geotechnical engineering;
- Step 4: Establish the objective function and call the GWO to seek the geomaterial properties based on the monitored data during the construction.
5. Numerical Example and Application
5.1. Numerical Example
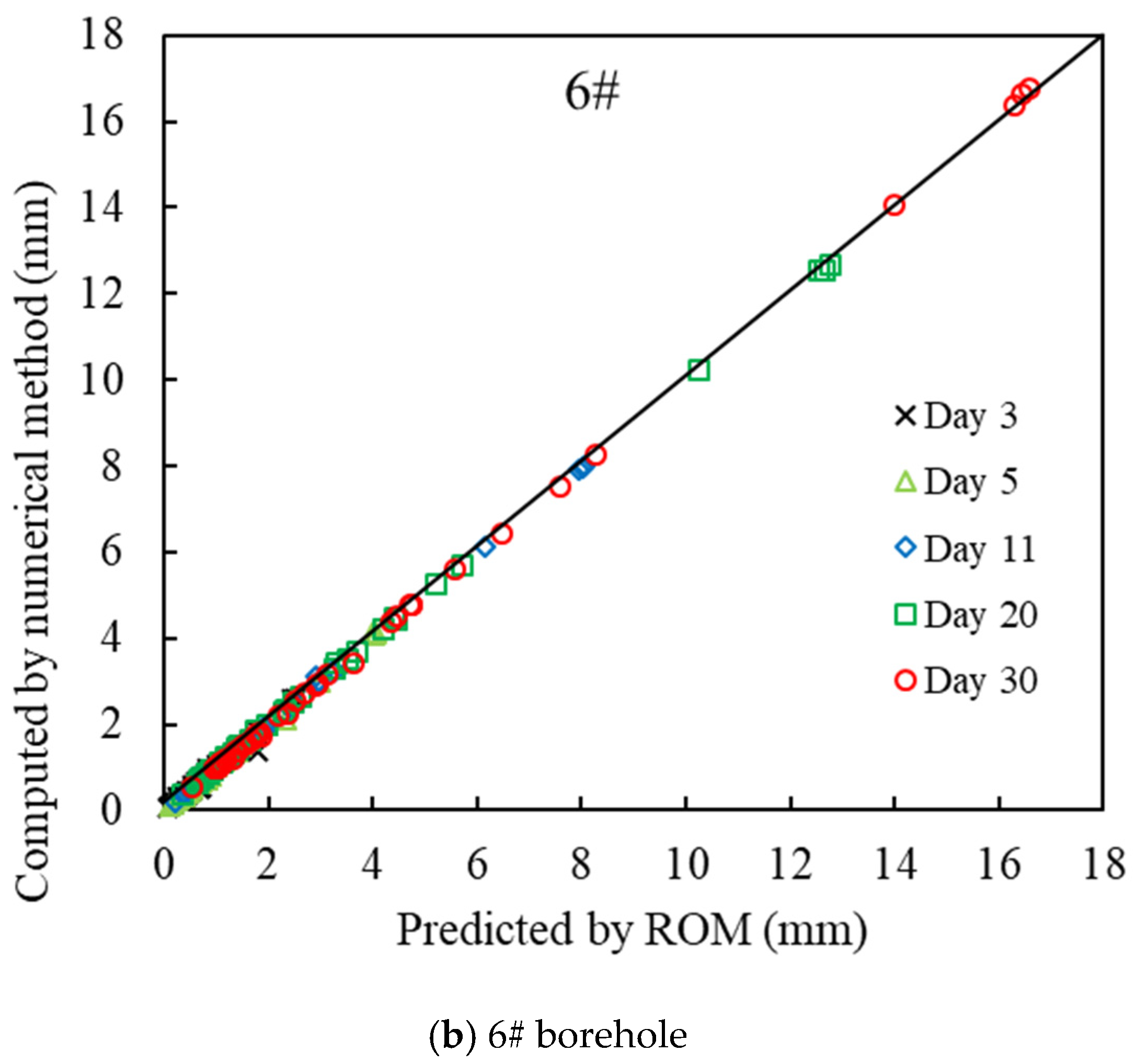
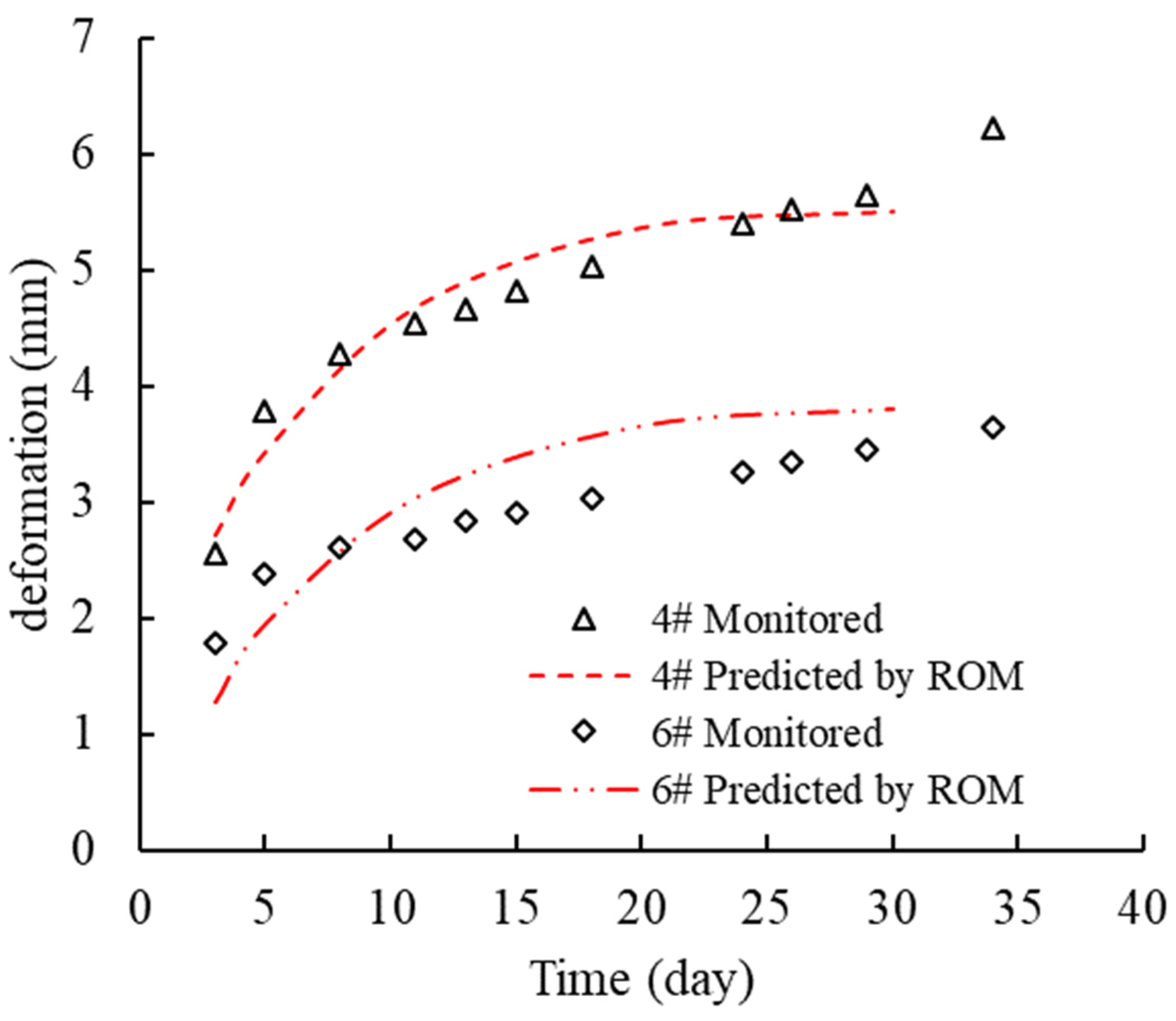
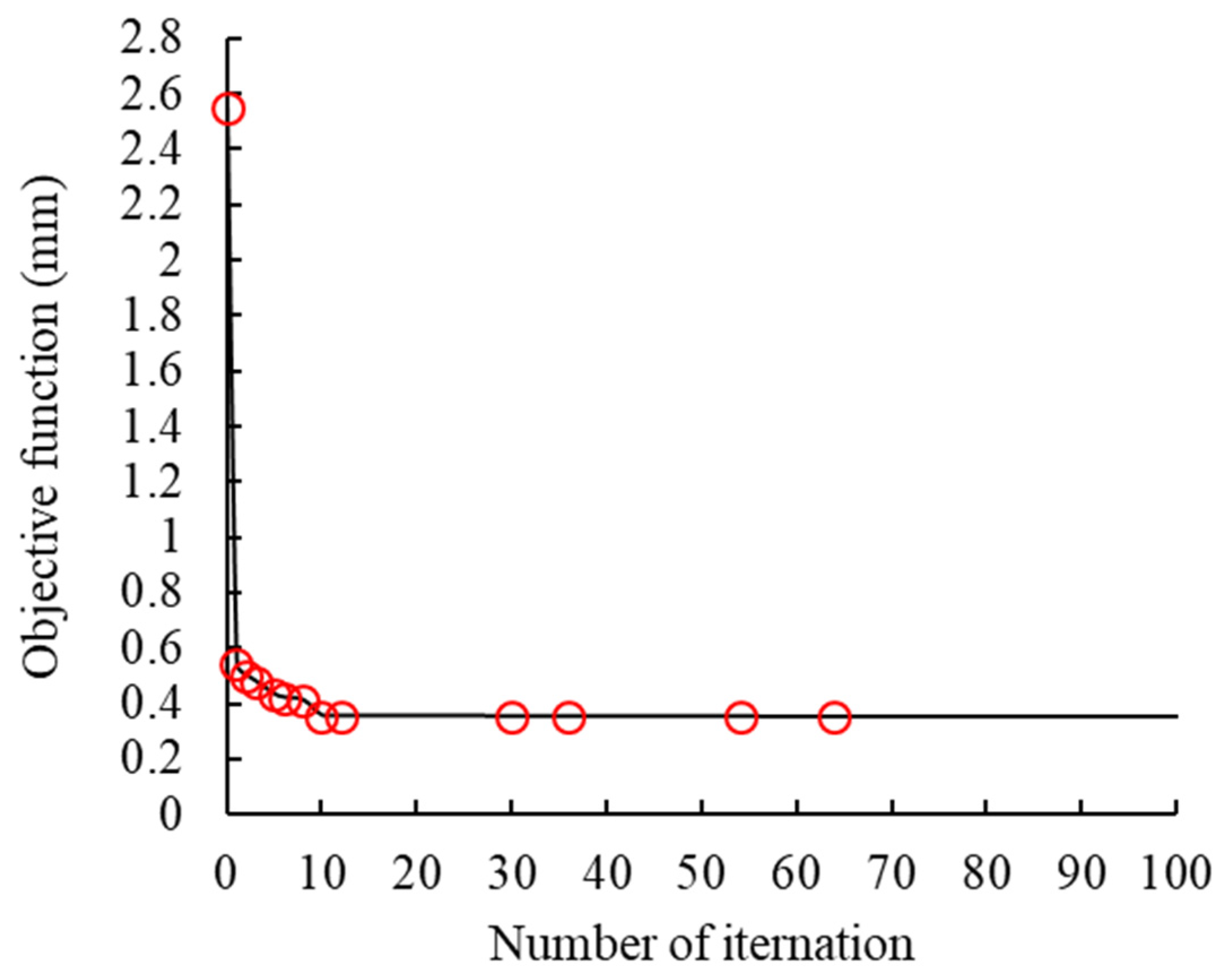
5.2. Application: Goupitan Experimental Tunnel
6. Conclusions
- (1)
- The ROM model was utilized to construct a low-order surrogate model for capturing the response-induced excavation in geotechnical engineering and replacing the numerical model in the back analysis. It is critical to practical engineering due to the difficulties in obtaining the analytical solution for geotechnical engineering;
- (2)
- Back analysis is a scientific and practical tool widely used in geotechnical engineering. The numerical model and optimal technology are the two critical components of back analysis. The developed back analysis framework takes full advantage of the merits of ROM and GWO and provides a feasible way for determining the property of the surrounding rock mass in geotechnical engineering;
- (3)
- ROM is an excellent physics-based data-driven surrogate model that can capture the mechanism of surrounding rock mass. GWO is an efficient metaheuristic method developed recently and is suitable for solving the black-box problem. However, ROM depends on the numerical fidelity model, and the parameters of the GWO algorithm influence the optimal performance. In a future study, the authors will further improve the developed framework by absorbing and combining the advantages and merits of various methods.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Z. A practical and efficient reliability-based design optimization method for rock tunnel support. Tunn. Undergr. Space Technol. 2022, 127, 104587. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, B.; Li, S.; Li, Z.; Zhu, C. Updating models and the uncertainty of mechanical parameters for rock tunnels using Bayesian inference. Geosci. Front. 2021, 12, 101198. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, B.; Li, S. Determination of geomaterial mechanical parameters based on back analysis and reduced-order model. Comput. Geotech. 2021, 132, 104013. [Google Scholar] [CrossRef]
- Jing, L.; Hudson, J.A. Numerical methods in rock mechanics. Int. J. Rock Mech. Min. Sci. 2002, 39, 409–427. [Google Scholar] [CrossRef]
- Choi, Y.-H.; Lee, S.S. Reliability and efficiency of metamodel for numerical back analysis of tunnel excavation. Appl. Sci. 2022, 12, 6851. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, B. Inverse analysis for rock mechanics based on a high dimensional model representation. Inverse Probl. Sci. Eng. 2021, 29, 1565–1585. [Google Scholar] [CrossRef]
- Gao, W. A comprehensive review on identification of the geomaterial constitutive model using the computational intelligence method. Adv. Eng. Inform. 2018, 38, 420–440. [Google Scholar] [CrossRef]
- Sakurai, S.; Takeuchi, K. Back analysis of measured displacements of tunnels. Rock Mech. Rock Eng. 1983, 16, 173–180. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, R.; Wu, C.; Goh, A.T.C.; Lacasse, S.; Liu, Z.; Liu, H. State-of-the-art review of soft computing applications in underground excavations. Geosci. Front. 2020, 11, 1095–1106. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, C.; Zhong, H.; Li, Y.; Wang, L. Prediction of undrained shear strength using extreme gradient boosting and random forest based on Bayesian optimization. Geosci. Front. 2021, 12, 469–477. [Google Scholar] [CrossRef]
- Pan, S.; Li, T.; Shi, G.; Cui, Z.; Zhang, H.; Yuan, L. The Inversion Analysis and Material Parameter Optimization of a High Earth-Rockfill Dam during Construction Periods. Appl. Sci. 2022, 12, 4991. [Google Scholar] [CrossRef]
- Deng, J.H.; Lee, C.F. Displacement back analysis for a steep slope at the Three Gorges Project site. Int. J. Rock Mech. Min. Sci. 2001, 38, 259–268. [Google Scholar] [CrossRef]
- Shang, Y.J.; Cai, J.G.; Hao, W.D.; Wu, X.Y.; Li, S.H. Intelligent back analysis of displacements using precedent type analysis for tunneling. Tunn. Undergr. Space Technol. 2002, 17, 381–389. [Google Scholar] [CrossRef]
- Yu, Y.Z.; Zhang, B.Y.; Yuan, H.N. An intelligent displacement back–analysis method for earth–rockfill dams. Comput. Geotech. 2007, 34, 423–434. [Google Scholar] [CrossRef]
- Gao, W. Back analysis for mechanical parameters of surrounding rock for underground roadways based on new neural network. Eng. Comput. 2018, 34, 25–36. [Google Scholar] [CrossRef]
- Feng, X.T.; Zhao, H.; Li, S.J. A new displacement back analysis to identify mechanical geo–material parameters based on hybrid intelligent methodology. Int. J. Numer. Anal. Method Geomech. 2004, 28, 1141–1165. [Google Scholar] [CrossRef]
- Zhao, H.; Ru, Z.; Yin, S. A practical indirect back analysis approach for geomechanical parameters identification. Mar. Georesources Geotechnol. 2015, 33, 212–221. [Google Scholar] [CrossRef]
- Zhao, H.; Yin, S. Inverse analysis of geomechanical parameters by artificial bee colony algorithm and multi-output support vector machine. Inverse Probl. Sci. Eng. 2016, 24, 1266–1281. [Google Scholar] [CrossRef]
- Pichler, B.; Lackner, R.; Mang, H.A. Back analysis of model parameters in geotechnical engineering by means of soft computing. Int. J. Numer. Method Eng. 2003, 57, 1943–1978. [Google Scholar] [CrossRef]
- Vardakos, S.; Gutierrez, M.; Xia, C.C. Parameter identification in numerical modeling of tunneling using the Differential Evolution Genetic Algorithm DEGA. Tunn. Undergr. Space Technol. 2012, 28, 109–123. [Google Scholar] [CrossRef]
- Zhao, H.B.; Yin, S.D. Geomechanical parameters identification by particle swarm optimization and support vector machine. Appl. Math. Model. 2009, 33, 3997–4012. [Google Scholar] [CrossRef]
- Yazdi, J.S.; Kalantary, F.; Yazdi, H.S. Calibration of Soil Model Parameters Using Particle Swarm Optimization. Int. J. Geomech. 2012, 12, 229–238. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Audouze, C.; Vuyst, F.D.; Nair, P.B. Reduced-order modeling of parameterized PDEs using time-space-parameter principal component analysis. Int. J. Numer. Methods Eng. 2009, 80, 1025–1057. [Google Scholar] [CrossRef]
- Sakurai, S. Back Analysis in Rock Engineering; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Duncan, F.M.E. Numerical modeling of yield zones in weak rocks. In Comprehensive Rock Engineering; Hudson, J.A., Ed.; Pergamon: Oxford, UK, 1993; Volume 2, pp. 49–75. [Google Scholar]
- Chen, B.R. Back Analysis of Rheological Parameters of Rock Mass Using Intelligent Method. Master’s Thesis, Northeastern University, Shenyang, China, 2003. [Google Scholar]
- Fahimifar, A.; Tehrani, F.M.; Hedayat, A.; Vakilzadeh, A. Analytical solution for the excavation of circular tunnels in a visco-elastic Burger’s material under hydrostatic stress field. Tunn. Undergr. Sp. Tech. 2010, 25, 297–304. [Google Scholar] [CrossRef]
- Goodman, R.E. Introduction to Rock Mechanics, 2nd ed.; Wiley: New York, NY, USA, 1989. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual | This Study | Relative Error (%) | |
|---|---|---|---|
| p0/MPa | 32.00 | 32.01 | −0.03 |
| E/MPa | 6800.00 | 6730.87 | 1.02 |
| c/MPa | 3.20 | 3.40 | −6.25 |
| φ/° | 32.00 | 31.03 | 3.03 |
| Time (Day) | Displacement (mm) | |
|---|---|---|
| 4# | 6# | |
| 3 | 2.558 | 1.778 |
| 5 | 3.789 | 2.377 |
| 11 | 4.531 | 2.685 |
| Clay-Green Clay Rock | Purple Clay Rock | ||||||
|---|---|---|---|---|---|---|---|
| G1h (GPa) | G2h (GPa) | η2h (GPa·d) | η1h (GPa·d) | G1z (GPa) | G2z (GPa) | η2z (GPa·d) | η1z (103 GPa·d) |
| 0.5–4.5 | 0.1–3.5 | 0.1–3.5 | 15–35 | 1–15 | 5–20 | 1–15 | 1.5–4.5 |
| Number of Monitored Day | 3rd, 5th and 11th | |
|---|---|---|
| Clay-green clay rock S2h1−1 | G1h (GPa) | 1.39 |
| G2h (GPa) | 0.20 | |
| η2h (GPa·d) | 0.12 | |
| η1h (GPa·d) | 35.00 | |
| Purple clay rock S2h1−2 | G1z (GPa) | 1.00 |
| G2z (GPa) | 20.00 | |
| η2z (GPa·d) | 8.68 | |
| η1z (103 GPa·d) | 1.96 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Liu, X.; Zang, X.; Zhao, H. Back Analysis of Geotechnical Engineering Based on Data-Driven Model and Grey Wolf Optimization. Appl. Sci. 2022, 12, 12595. https://doi.org/10.3390/app122412595
Zhao L, Liu X, Zang X, Zhao H. Back Analysis of Geotechnical Engineering Based on Data-Driven Model and Grey Wolf Optimization. Applied Sciences. 2022; 12(24):12595. https://doi.org/10.3390/app122412595
Chicago/Turabian StyleZhao, Lihong, Xinyi Liu, Xiaoyu Zang, and Hongbo Zhao. 2022. "Back Analysis of Geotechnical Engineering Based on Data-Driven Model and Grey Wolf Optimization" Applied Sciences 12, no. 24: 12595. https://doi.org/10.3390/app122412595
APA StyleZhao, L., Liu, X., Zang, X., & Zhao, H. (2022). Back Analysis of Geotechnical Engineering Based on Data-Driven Model and Grey Wolf Optimization. Applied Sciences, 12(24), 12595. https://doi.org/10.3390/app122412595