
Development and Performance Measurements of Gas Foil Polymer Bearings with a Dual-Rotor Test Rig Driven by Permanent Magnet Electric Motor


Abstract
:1. Introduction

2. Bearing Fabrication and Characterization Tests
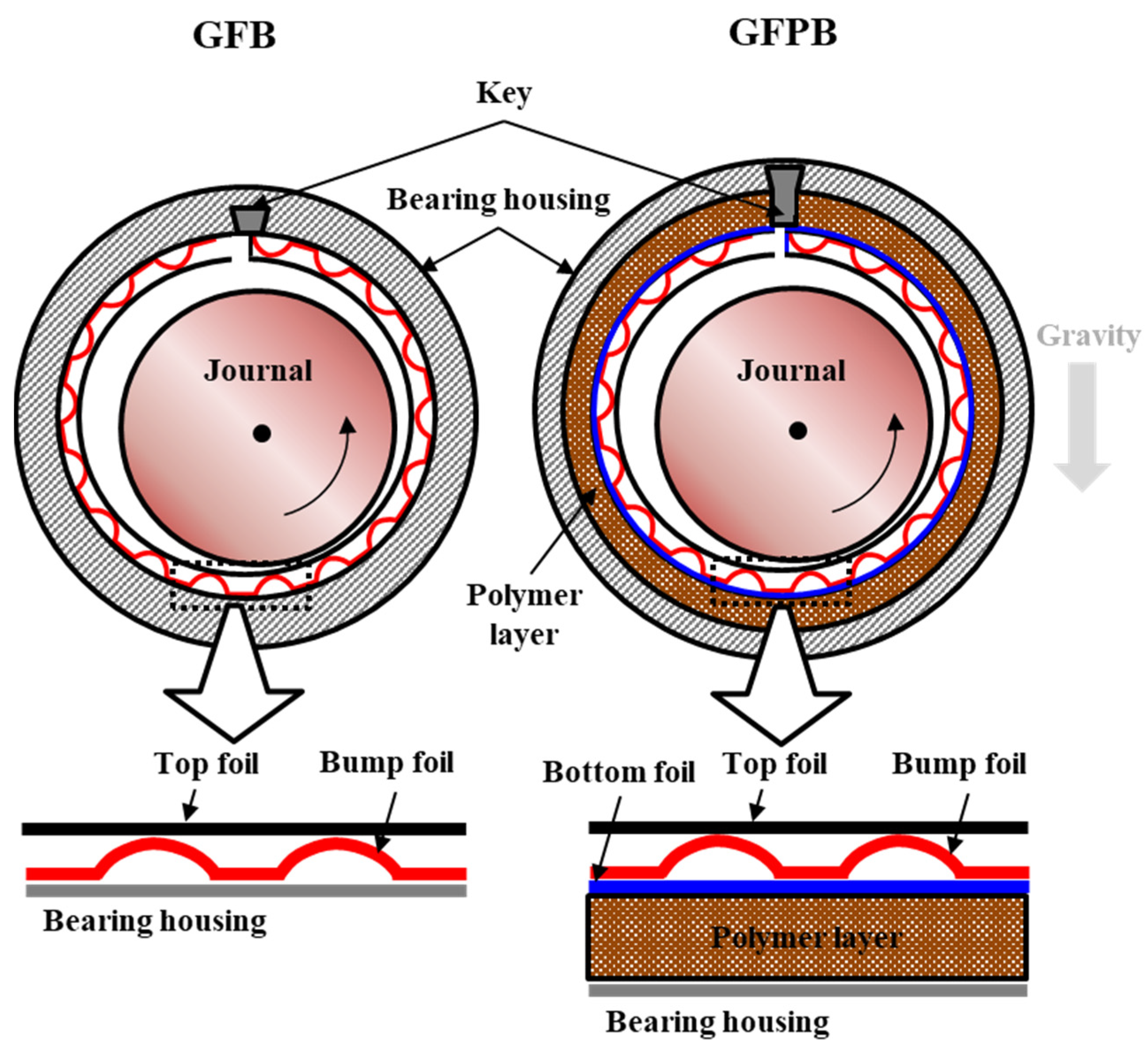
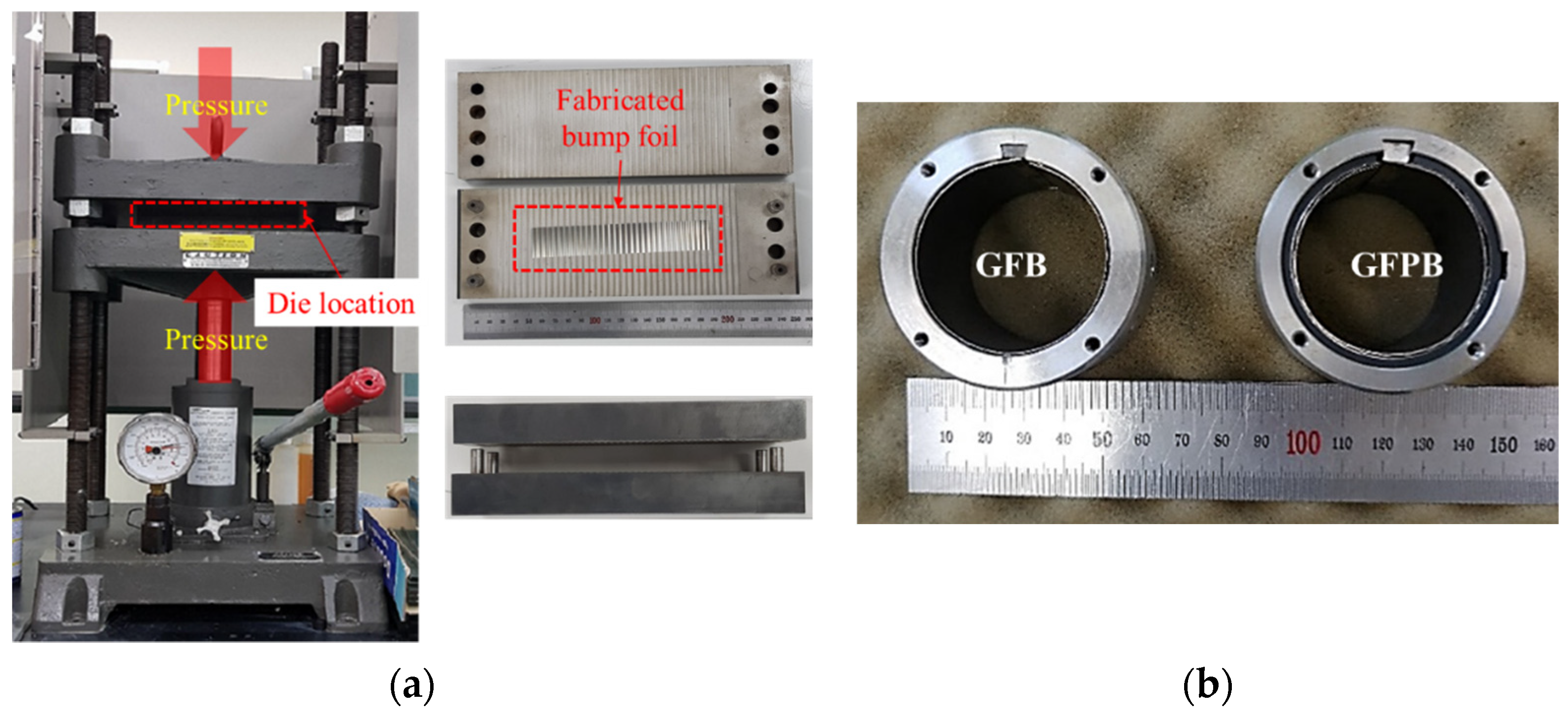
2.1. Fabrication of Test Bearing
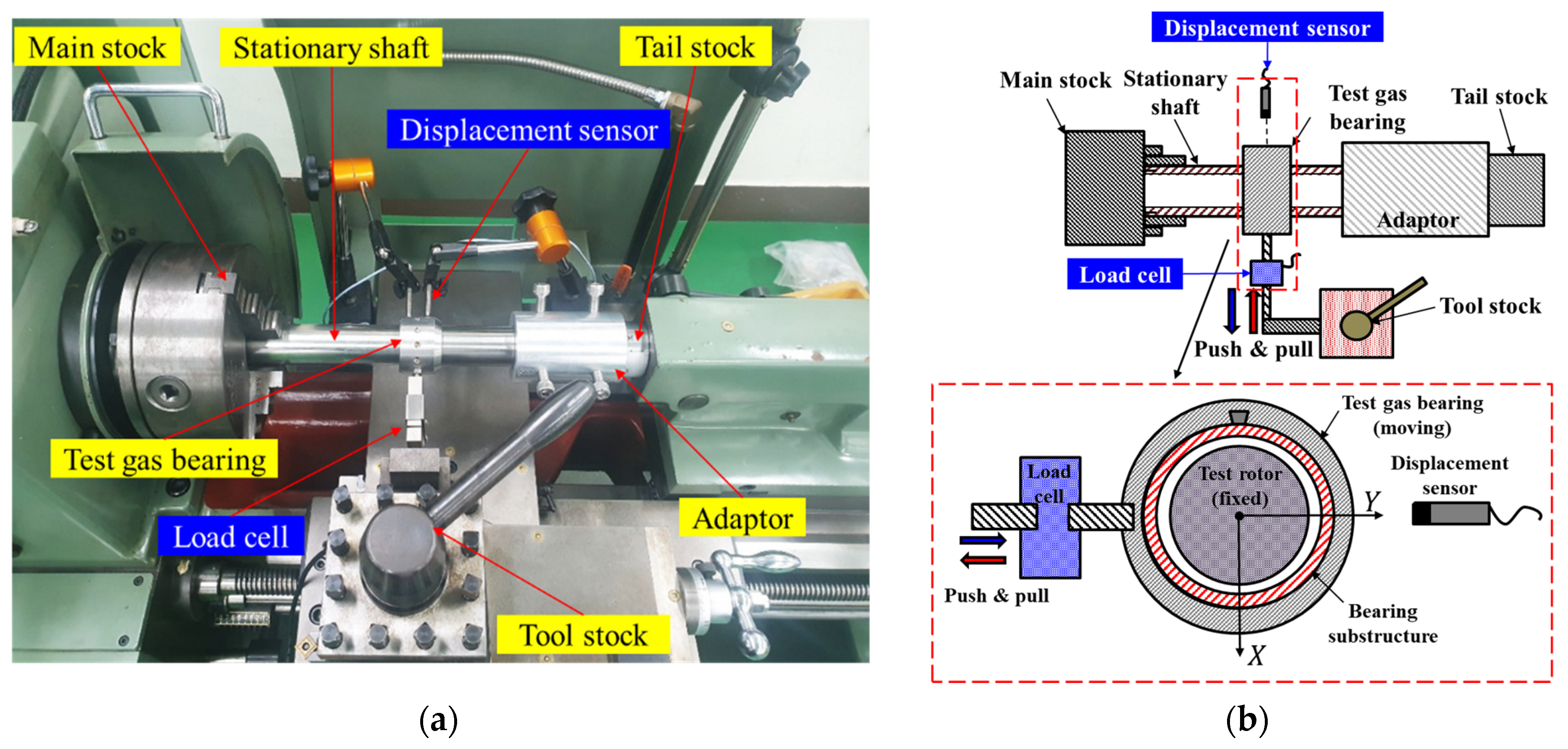
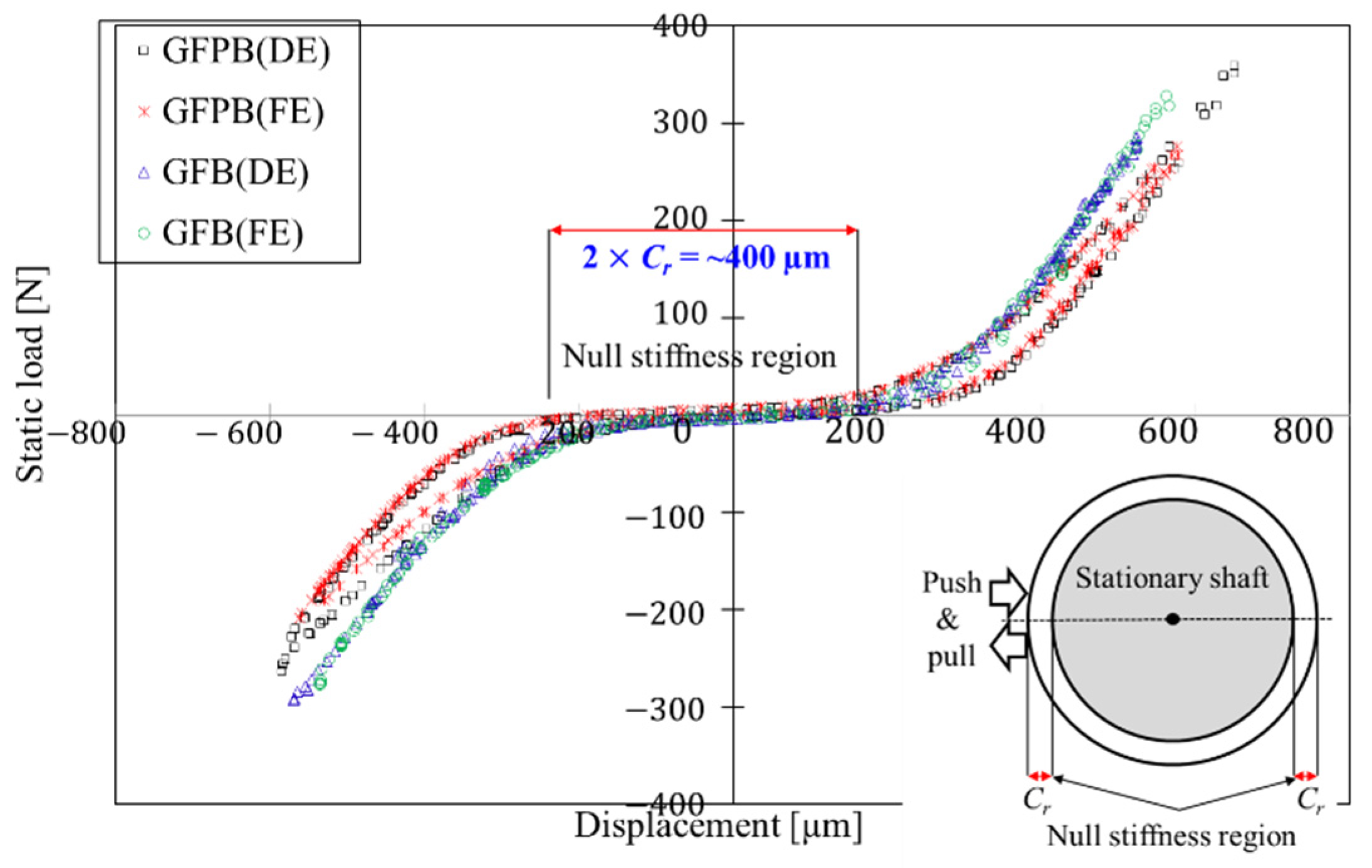
2.2. Measurement of Clearance in Test Bearing
3. Verification of Mode Properties of a Dual-Rotor
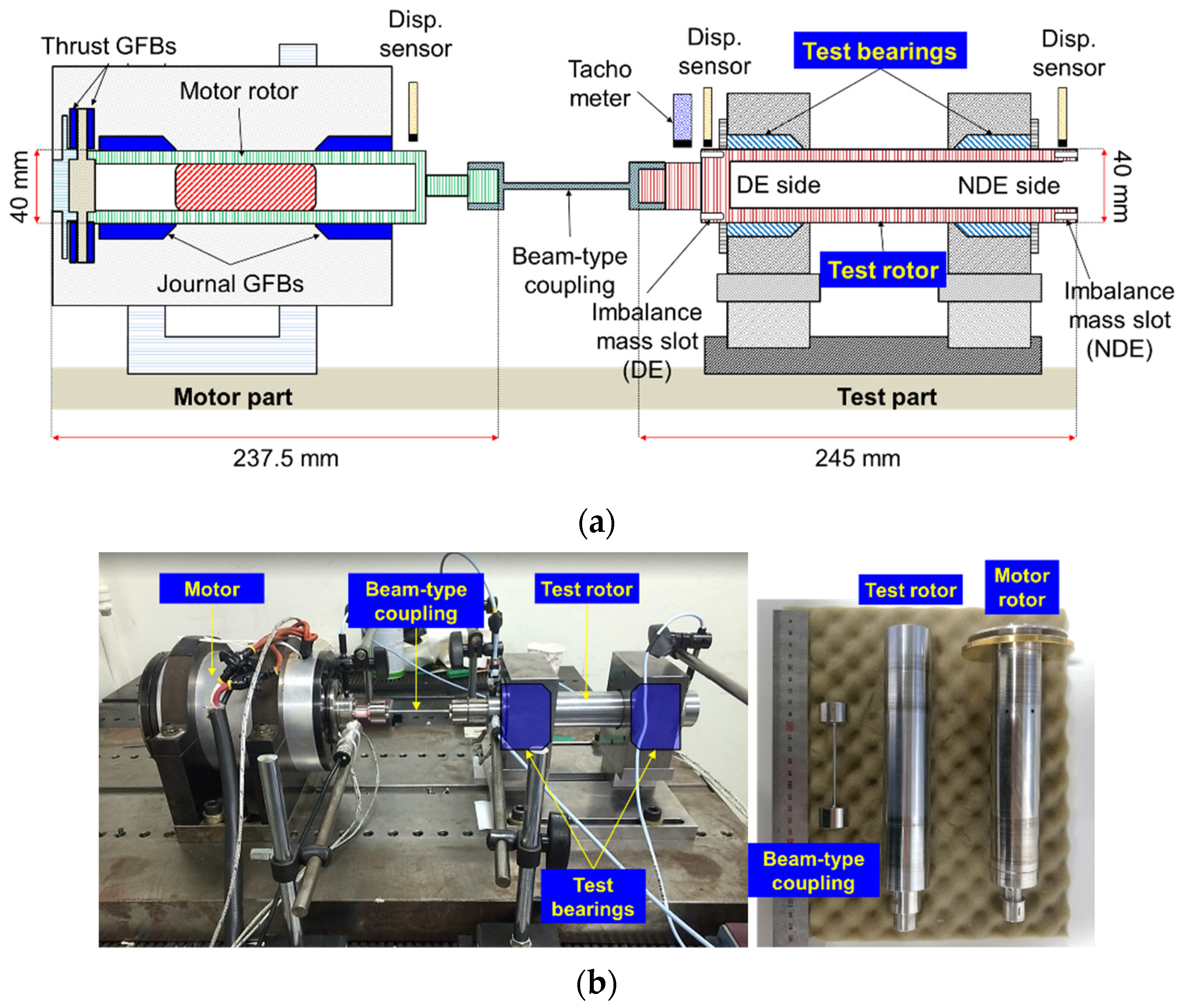
3.1. Dual-Rotor Rotordynamic Test Rig
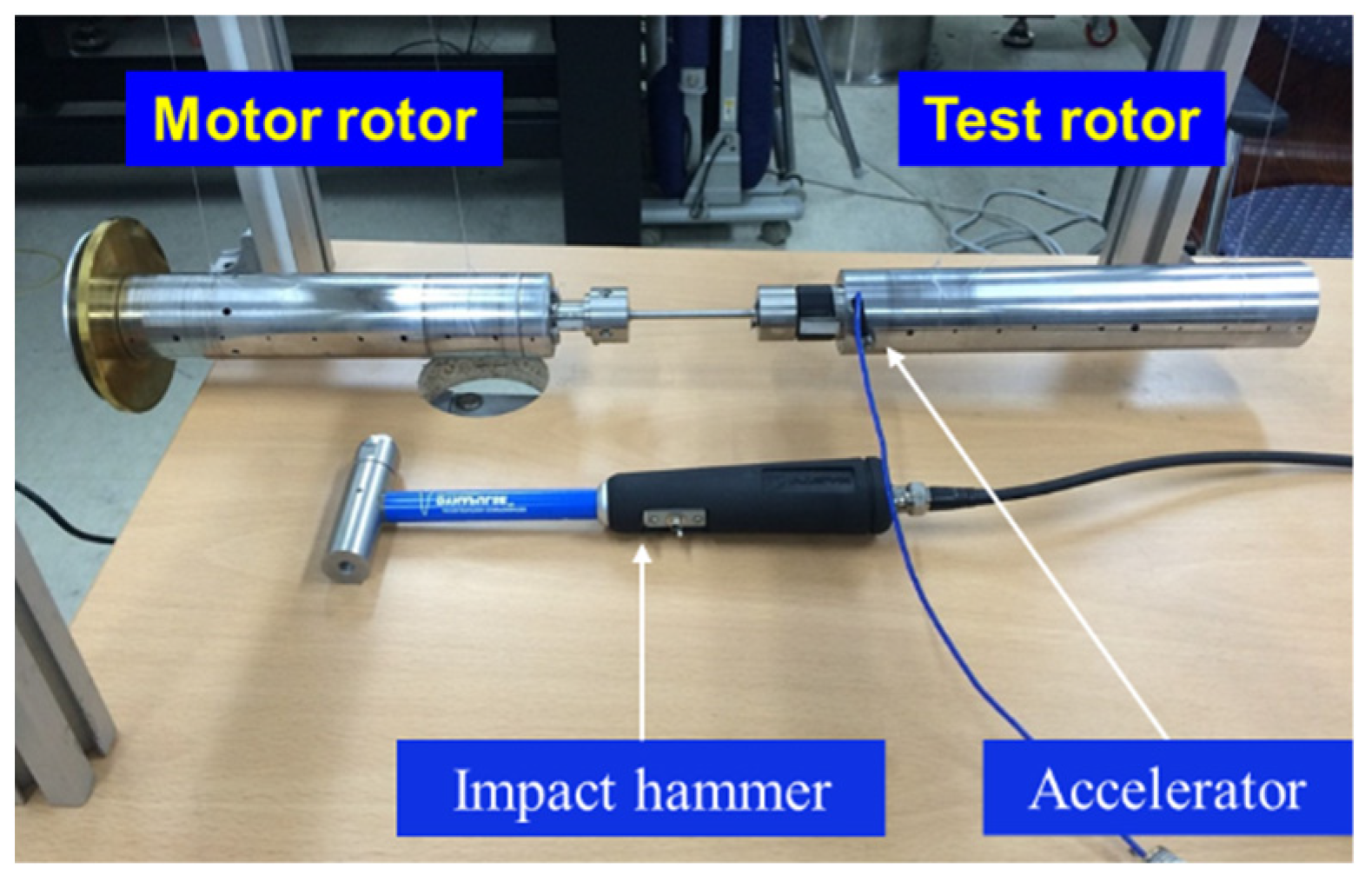
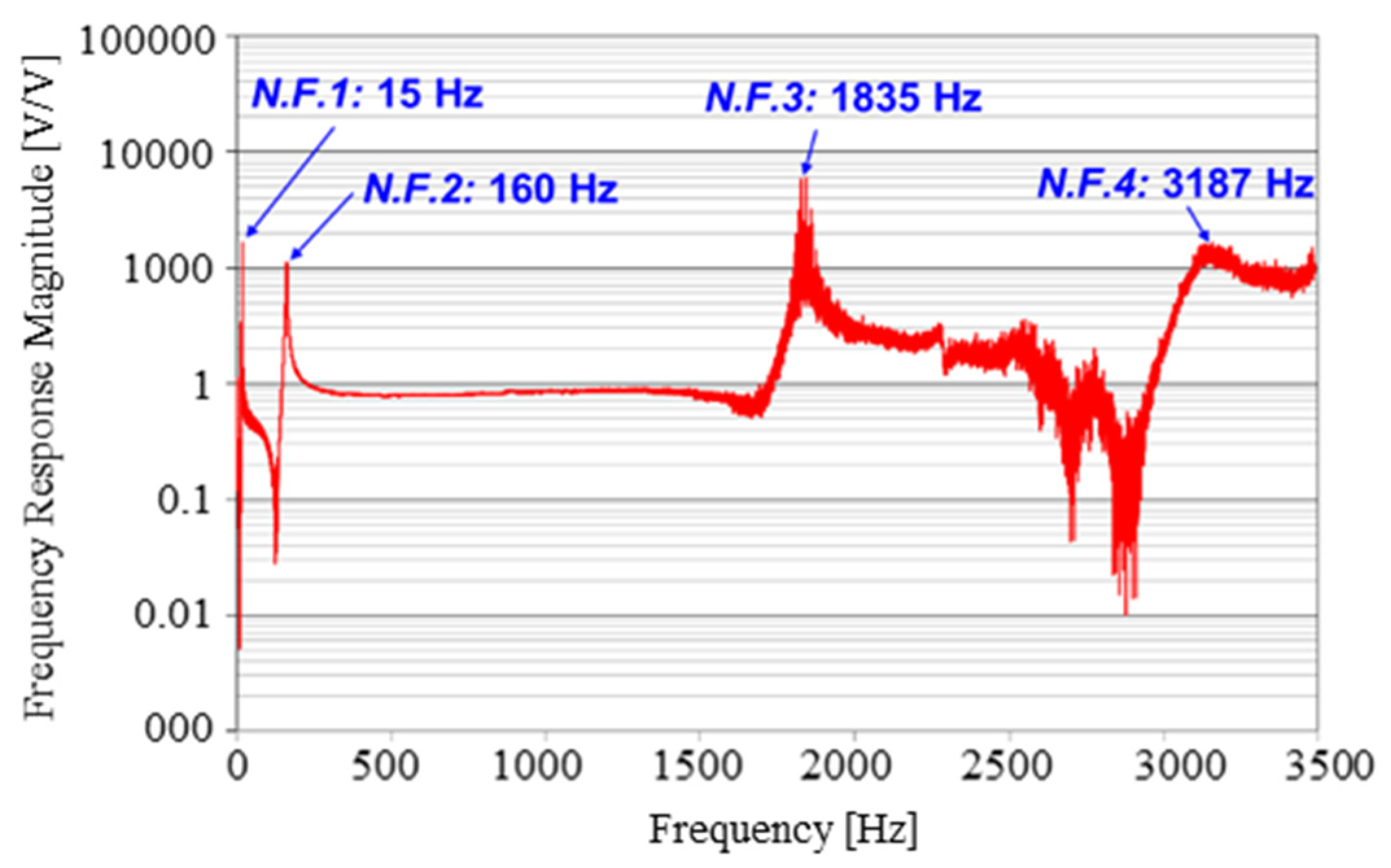
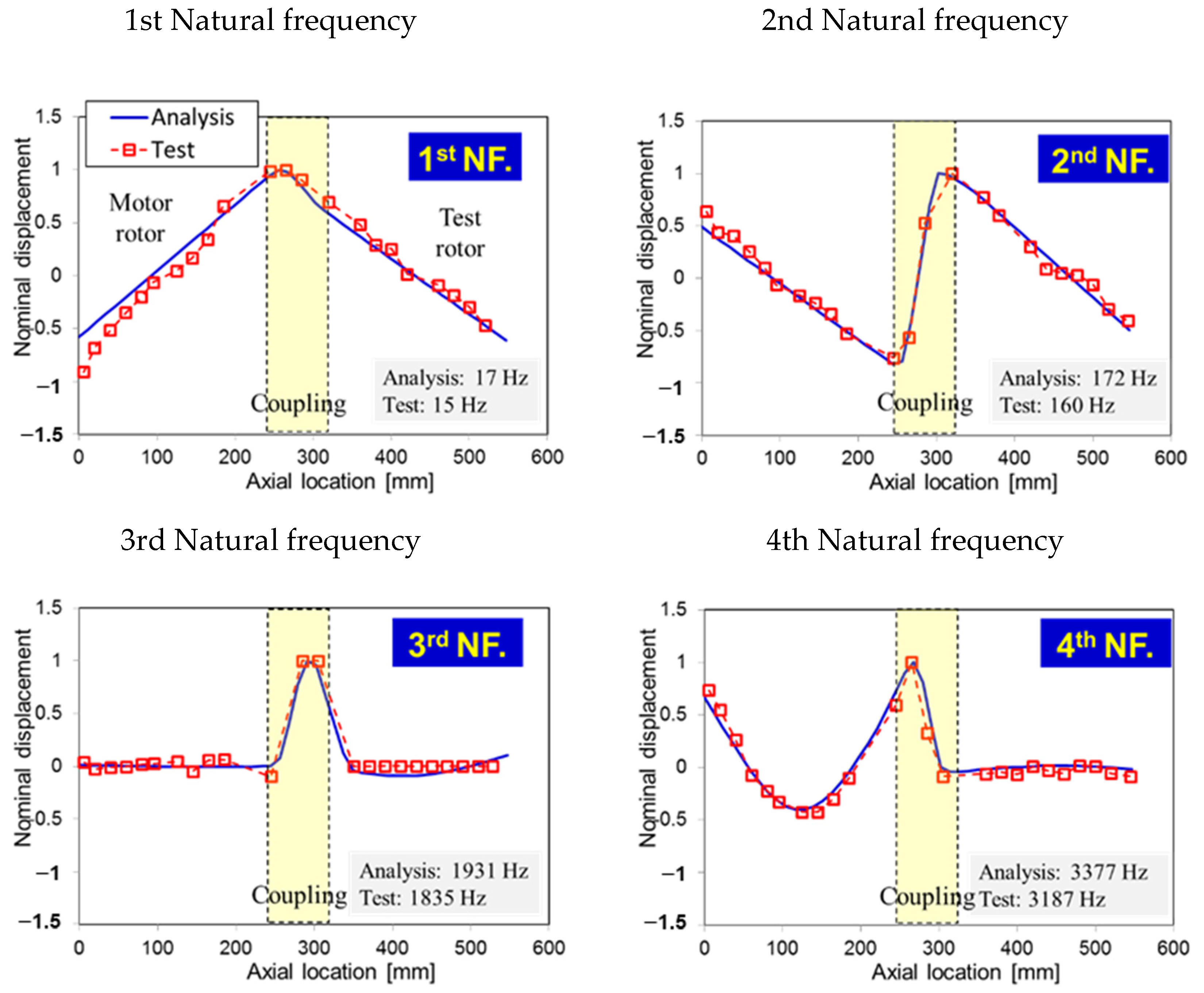
3.2. Modal Test and Analysis
4. Rotordynamic Test
4.1. Test Methods
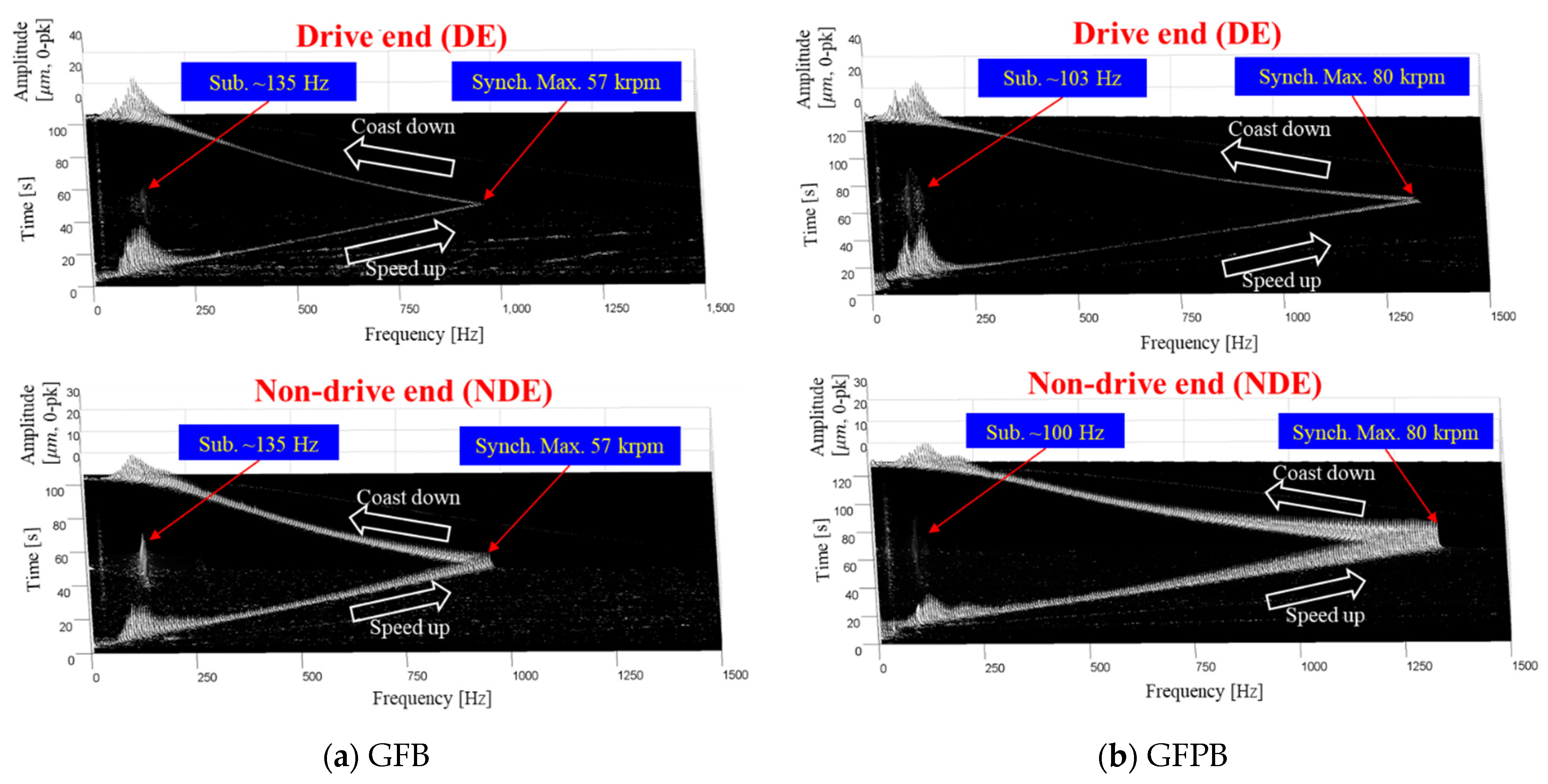
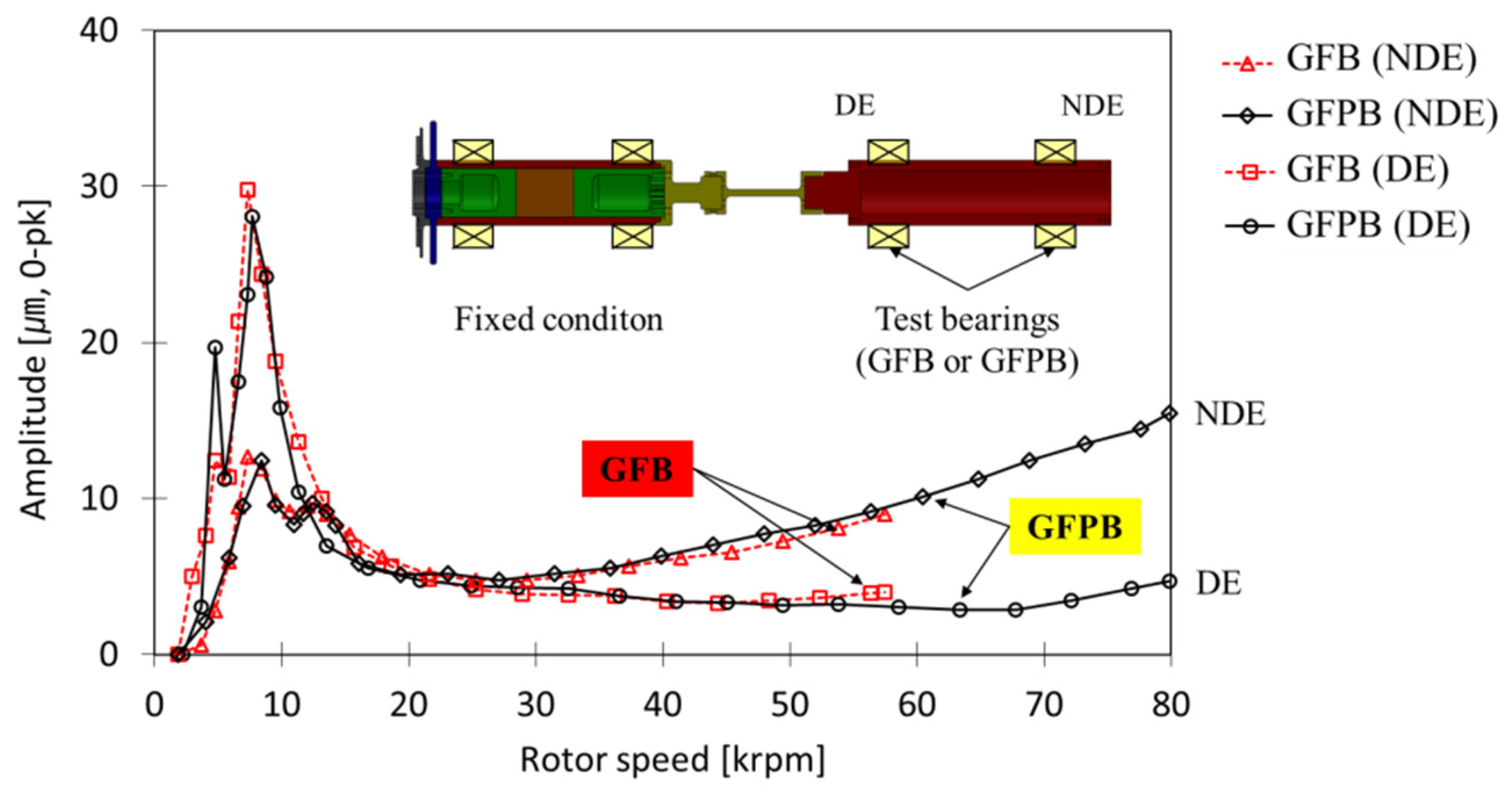
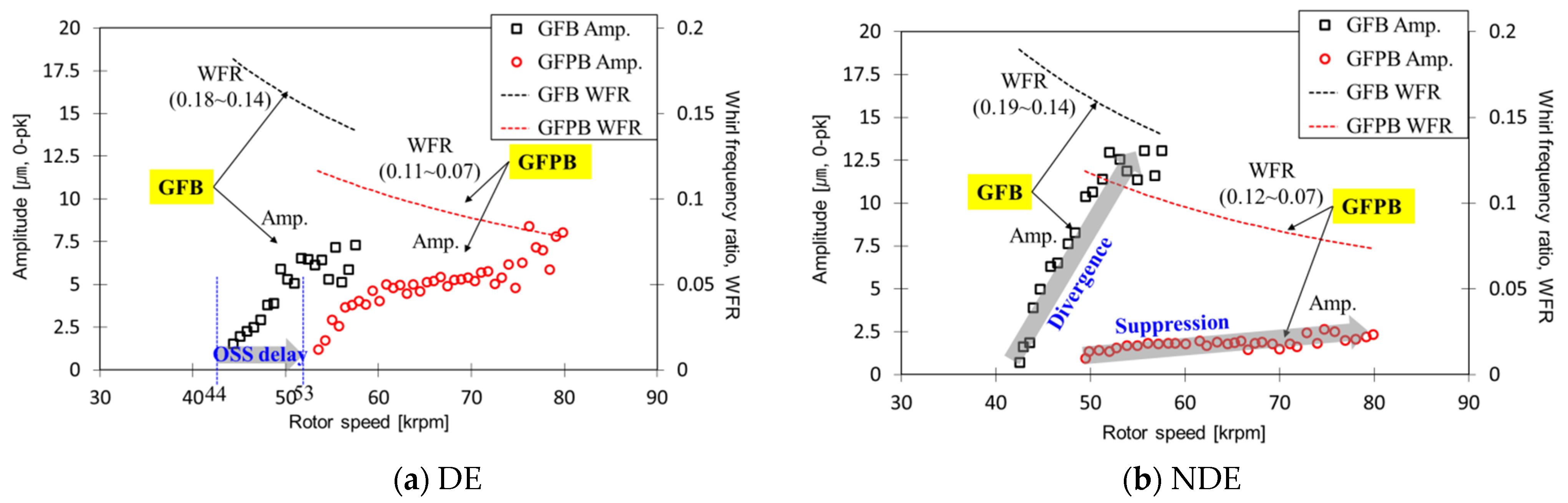
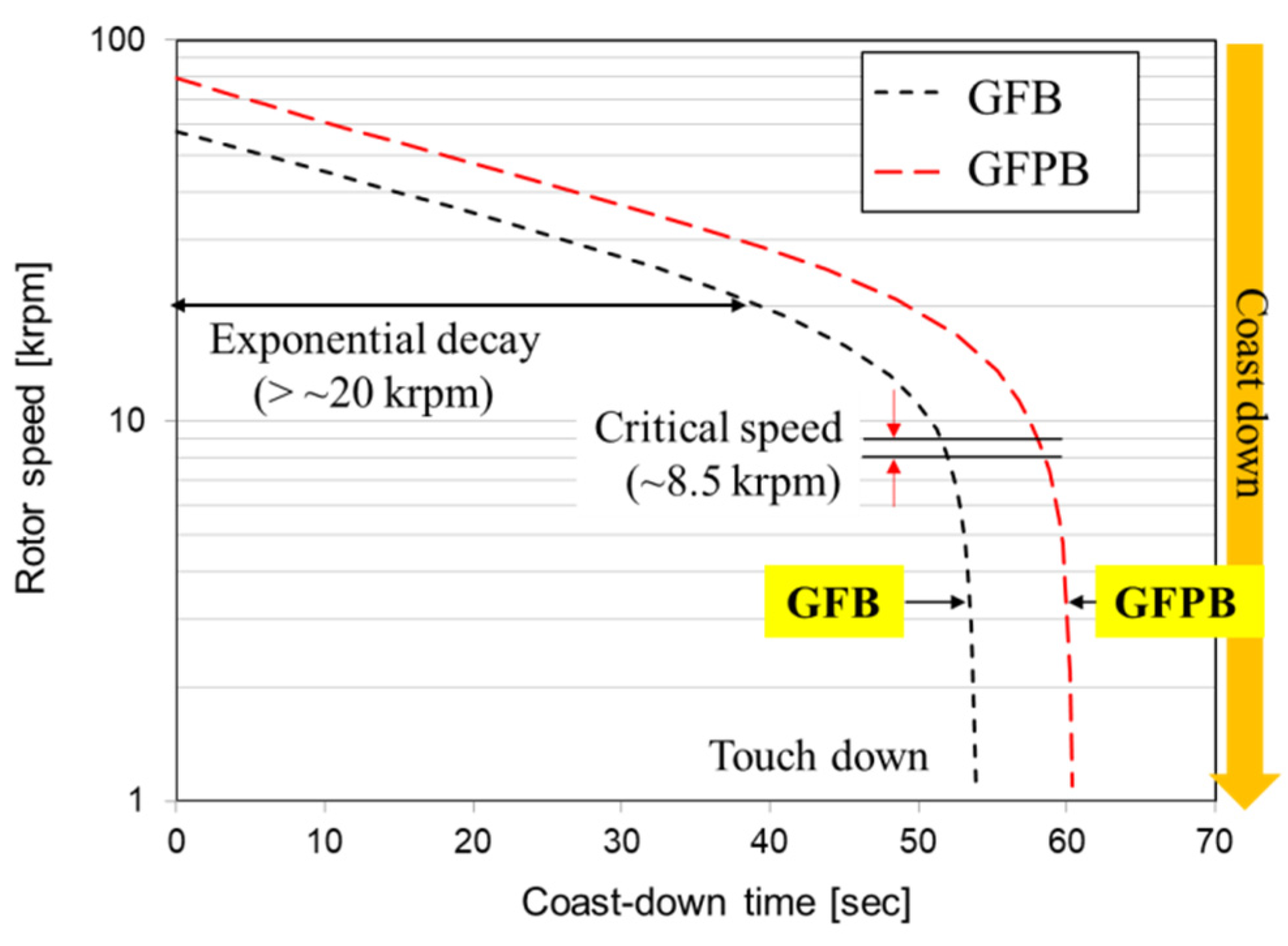
4.2. Test Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
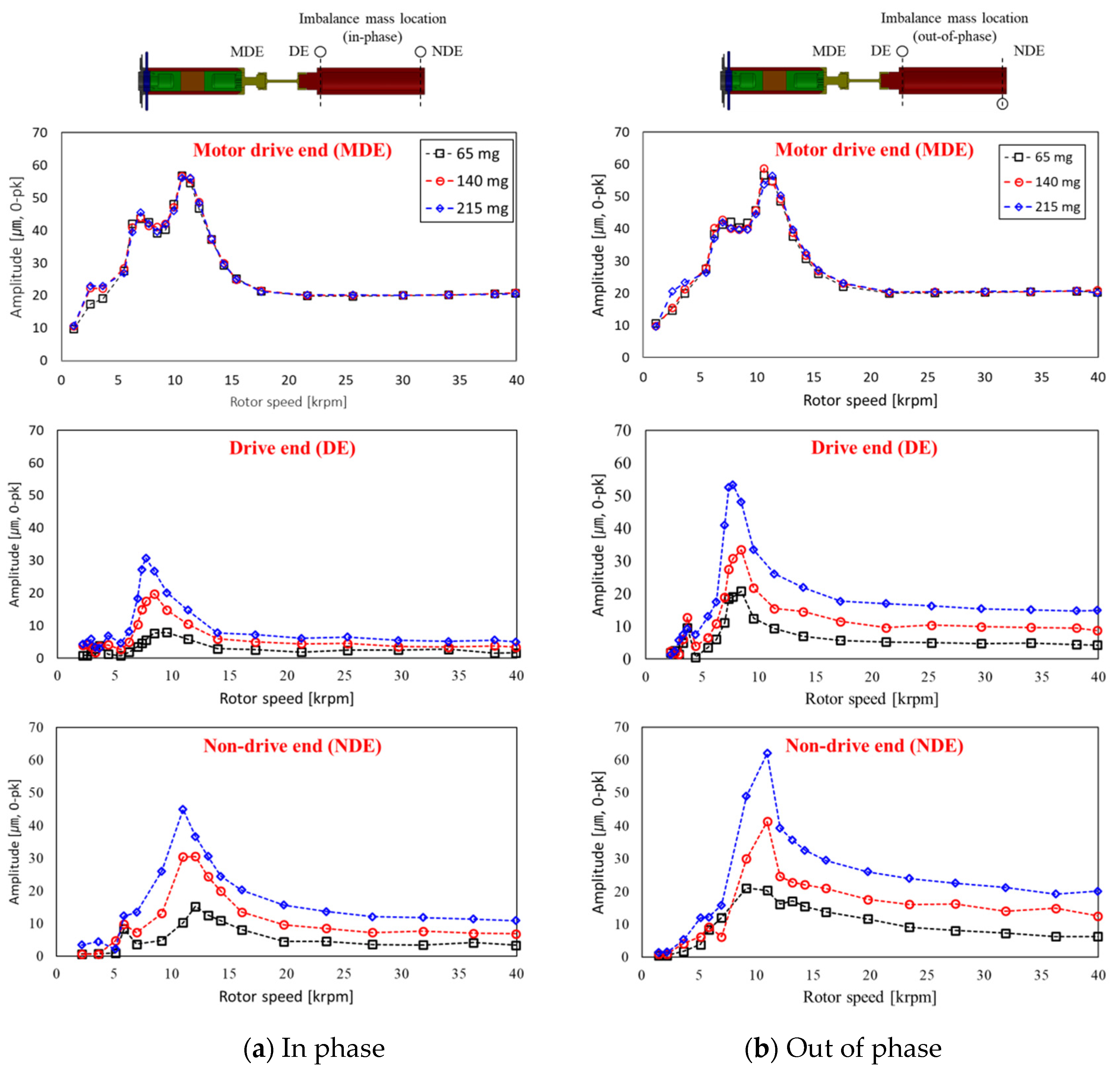
| Imbalance Layout | ||
|---|---|---|
| DE | NDE | |
| In–phase | 65 mg (0°) | 65 mg (0°) |
| 140 mg (0°) | 140 mg (0°) | |
| 215 mg (0°) | 215 mg (0°) | |
| Out–of–phase | 65 mg (0°) | 65 mg (180°) |
| 140 mg (0°) | 140 mg (180°) | |
| 215 mg (0°) | 215 mg (180°) | |

References
- Andrés, L.S.; Kim, T.H. Analysis of gas foil bearings integrating FE top foil models. Tribol. Int. 2009, 42, 111–120. [Google Scholar] [CrossRef]
- Kim, T.H.; Andrés, L.S. Heavily Loaded Gas Foil Bearings: A Model Anchored to Test Data. ASME J. Eng. Gas Turbines Power 2008, 130, 012504. [Google Scholar] [CrossRef]
- Heshmat, H.; Walowit, J.A.; Pinkus, O. Analysis of Gas-Lubricated Foil Journal Bearings. J. Lubr. Technol. 1983, 105, 647–655. [Google Scholar] [CrossRef]
- Simek, J. Application of a New Type of Aerodynamic Tilting Pad Journal Bearing in Power Gyroscope. Eng. Mech. 2012, 19, 359–368. [Google Scholar]
- Arora, V.; Van Der Hoogt, P.J.M.; Aarts, R.G.K.M.; De Boer, A. Identification of stiffness and damping characteristics of axial air-foil bearings. Int. J. Mech. Mater. 2011, 7, 231–243. [Google Scholar] [CrossRef] [Green Version]
- Childs, D. Turbomachinery Rotordynamics; Chapter 3; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Kim, T.H.; Andrés, L.S. Effects of a Mechanical Preload on the Dynamic Force Response of Gas Foil Bearings: Measurements and Model Predictions. Tribol. Trans. 2009, 52, 569–580. [Google Scholar] [CrossRef]
- Park, J.S.; Sim, K.H. Rotordynamic Analysis of Gas Foil-Polymer Bearings Based on a Structural Elasticity Model of Polymer Layer along with Static-Load Deflection Tests. Appl. Sci. 2021, 11, 1789. [Google Scholar] [CrossRef]
- Sim, K.H.; Park, J.S. Performance measurements of gas bearings with high damping structures of polymer and bump foil via electric motor driving tests and one degree-of-freedom shaker dynamic loading tests. J. Eng. Gas Turbines Power 2017, 139, 092504. [Google Scholar] [CrossRef]
- Lee, Y.B. Dynamic characteristics of a flexible rotor system supported by a viscoelastic foil bearing (VEFB). Tribol. Int. 2004, 37, 679–687. [Google Scholar] [CrossRef]
- Lee, Y.B. Unbalance Response of a Super-Critical Rotor Supported by Foil Bearings—Comparison with Test Results©. Tribol. Trans. 2004, 47, 54–60. [Google Scholar] [CrossRef]
- Żywica, G.; Baginski, P.; Andrearczyk, A. Experimental research on gas foil bearings with polymer coating at an elevated temperature. Tribologia 2016, 3, 217–227. [Google Scholar] [CrossRef]
- Schilling, G.; Baurlein, K.; Liebich, R. Numerical Description of a Rotor Supported by Gas Polymer Bearings for Time Domain Simulations-Implementation and Parametrization of the Struc-ture Model. In Proceedings of the 13th SIRM: The 13th International Conference on Dynamics of Rotating Machinery, Copenhagen, Denmark, 13–15 February 2019; pp. 340–349. [Google Scholar]
- Radil, K.; Howard, S.; Dykas, B. The role of radial clearance on the performance of foil air bearings. Tribol. Trans. 2002, 45, 485–490. [Google Scholar] [CrossRef] [Green Version]
- Andres, L.S.; Rubio, D.; Kim, T.H. Rotordynamic performance of a rotor supported on bump type foil gas bearings: Experiments and predictions. J. Eng. Gas Turbines Power. 2007, 41, 850–857. [Google Scholar] [CrossRef]
- Song, M. Study on the Dynamic Properties of Nitrile-Butadiene Rubber/Hindered Phenol Mixtures by Molecular Dynamics Simulation. Asian J. Chem. 2013, 25, 5200. [Google Scholar] [CrossRef]
- Hwang, W.G.; Wei, K.H.; Wu, C.M. Mechanical, thermal, and barrier properties of NBR/organosilicate nanocomposites. Polym. Eng. Sci. 2004, 44, 2117–2124. [Google Scholar] [CrossRef]
- Ruscitto, D.; Mc Cormick, J.; Gray, S. Hydrodynamic Air Lubricated Compliant Surface Bearing for an Automotive Gas Turbine Engine I-Journal Bearing Performance; NASA CR-135368; Mechanical Technology Inc.: New York, NY, USA, 1978. [Google Scholar]
- Sim, K.H.; Park, J.S.; Lee, S.H. Identification of Frequency-Dependent Dynamic Characteristics of a Bump Structure for Gas-Foil Bearings via 1-DOF Shaker Tests Under Air Pressurization. Trans. Korean Soc. Mech. Eng. A 2015, 39, 1029–1037. [Google Scholar] [CrossRef]
- 2020 ANSYS. Available online: https://www.ansys.com/ (accessed on 9 September 2021).
- Park, J.S.; Sim, K.H. A feasibility study of controllable gas foil bearings with piezoelectric materials via rotordynamic model predictions. J. Eng. Gas Turbines Power 2019, 141, 021027. [Google Scholar] [CrossRef]
- Standard, A.P.I. Special Purpose Steam Turbines for Petroleum, Chemical, and Gas Industry Service; American Petroleum Institute: Washington, DC, USA, 1995. [Google Scholar]
- Flack, R.D.; Rooke, J.H.; Bielk, J.R.; Gunter, E.J. Comparison of the unbalance responses of Jeffcott rotors with shaft bow and shaft runout. J. Mech. Des. 1982, 104, 318–328. [Google Scholar] [CrossRef]
- Genta, G. Dynamics of Rotating Systems; Chapter 8; Springer: New York, NY, USA, 2005. [Google Scholar]











| Part | Parameters | Values |
|---|---|---|
| Test bearings | Length | 35.00 mm |
| Geometric clearance (designed) | 0.20 mm | |
| Geometric clearance (adjusted for tests) | 0.15 mm | |
| Bump foil | Thickness | 0.13 mm |
| Bump height | 0.50 mm | |
| Bump pitch | 4.57 mm | |
| Bump half length | 1.81 mm | |
| Material | Inconel X-750 | |
| Polymer layer | Thickness | 2.00 mm |
| Width | 35.00 mm | |
| Material | Nitrile Butadiene rubber |
| Part | Parameters | Values |
|---|---|---|
| Test rotor | Diameter | 40.00 mm |
| Length | 245 mm | |
| Mass | 1.338 kg | |
| Material | Inconel718 | |
| Moment of inertia (polar, transverse) | 0.35 g-m2, 6.39 g-m2 | |
| Motor rotor | Diameter | 40.00 mm |
| Length | 237.5 mm | |
| Mass | 2.0 kg | |
| Coupling | Beam diameter | 3.00 mm |
| Beam length | 70.00 mm | |
| Mass | 38.7 × 10-³ kg | |
| Moment of inertia (polar, transverse) | 4.45 × 10−3 g-m2, 6.82 × 10−2 g-m2 | |
| Material | Titanium alloy | |
| Lateral stiffness | 1.47 × 10−4 N/m | |
| Test bearings | Geometric clearance | 150 µm (adjusted with shim) |
| Order | Experiment (Hz) | Analysis (Hz) | Relative Error (%) |
|---|---|---|---|
| 1st | 15 | 17 | 6 |
| 2nd | 160 | 172 | 7 |
| 3rd | 1835 | 1931 | 5 |
| 4th | 3187 | 3377 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Kim, D.; Sim, K. Development and Performance Measurements of Gas Foil Polymer Bearings with a Dual-Rotor Test Rig Driven by Permanent Magnet Electric Motor. Appl. Sci. 2022, 12, 1505. https://doi.org/10.3390/app12031505
Park J, Kim D, Sim K. Development and Performance Measurements of Gas Foil Polymer Bearings with a Dual-Rotor Test Rig Driven by Permanent Magnet Electric Motor. Applied Sciences. 2022; 12(3):1505. https://doi.org/10.3390/app12031505
Chicago/Turabian StylePark, Jisu, Donghee Kim, and Kyuho Sim. 2022. "Development and Performance Measurements of Gas Foil Polymer Bearings with a Dual-Rotor Test Rig Driven by Permanent Magnet Electric Motor" Applied Sciences 12, no. 3: 1505. https://doi.org/10.3390/app12031505
APA StylePark, J., Kim, D., & Sim, K. (2022). Development and Performance Measurements of Gas Foil Polymer Bearings with a Dual-Rotor Test Rig Driven by Permanent Magnet Electric Motor. Applied Sciences, 12(3), 1505. https://doi.org/10.3390/app12031505