1. Introduction
The dynamical motion of a pendulum in generality or the motion of any system containing a pendulum is considered as one of the oldest scientific subjects in non-linear dynamics. The planar motion of a simple pendulum has been investigated in several research works that reveal its complicated behavior, e.g., [
1,
2,
3,
4,
5]. The periodic motion of a simple pendulum with a pivot point that moved on a vertical ellipse was investigated in [
1], in which some special cases were examined to show the different motions of this point. On the other hand, the chaotic motion of a parametrically excited pendulum as a mathematical model has been investigated numerically, experimentally, and analytically in [
2,
3,
4], respectively. The harmonic motion of the non-linear vibrations of an excited auto-parametric system was studied in [
5]. The harmonic balance method (HBM) [
6] was used to evaluate the response of this system in which its performance was studied.
The periodic solutions of the equations of motion (EOM) of a greatly damped pendulum were investigated in [
7] under some certain constraints, in which the behavior of the pendulum led to chaos through a symmetrical pitchfork bifurcation. A global analytical inspection of the pendulum is presented in [
8,
9,
10], where the pendulum was subjected to various applied external forces and moments. The dynamics of two planar flexible pendulums attached to an excited horizontal platform were studied in [
11]. The authors asserted that the pendulum exhibited rotational and oscillatory motion simultaneously, in which the stability of the motion existed for the fixed in-phase and anti-phase states simultaneously.
The HBM was used in [
12] to obtain the analytic results of an auto-parametric system connected to a non-linear elastic pendulum close to one of the arising parametric resonances. The authors verified the attained results by the comparison with the numerical results. On the other hand, the perturbation technique of multiple scales (PTMS) [
6] has been used in several scientific works, such as [
13,
14,
15,
16,
17,
18,
19,
20,
21], to obtain the approximate solutions of the controlling EOM of the corresponding dynamical systems. In refs. [
13,
14,
15], the authors investigated the motion of an elastic pendulum under the influence of excitation force and moment, when its supported point moved in circular, Lissajous, and elliptic paths, respectively. The possible fixed points and the corresponding steady-state solutions of the stable points are gained. Some practical examples are presented in [
15] to reveal the possible movements of the pendulum’s pivot point. The rigid body (RB) motion as a pendulum was investigated in [
16] with a fixed pivot point, while its generalizations were examined in [
17,
18] for the motion of a damped spring RB with linear and non-linear stiffness, respectively, and when the movement of the supported pendulum’s point was constrained to elliptic trajectories. The obtained solutions were sketched with the possible resonances curves for different parameters of the investigated system. Another generalization is found in [
19], where the path of the suspension point had the form of a Lissajous curve. The analytical results were compared with the numerical results, revealing a high consistency between them and showing the accuracy of the analytical technique.
Recently, the motion of a three degrees of freedom (DOF) double pendulum was examined in [
20] under the existence of a harmonic excitation force and two moments. The first pendulum was considered to be rigid, in which its first point was constrained to move only in an elliptical path, while its second end was connected with a damped spring pendulum. The attained solutions were plotted and verified with the numerical solutions. On the other hand, the resonance curves corresponding to the stability and instability areas of a two DOF system were investigated in [
21]. It was considered that the motion was constrained to a plane under the influence of two harmonic forces at the free end of a damped elastic pendulum and one harmonic moment that acted at the suspension point.
The motion of a spring-damper pendulum in the presence of a resistance force besides torque at an immovable suspension point and the force at the free end of the pendulum with harmonic magnitude were investigated in [
22]. The effectiveness of the fluid flow properties, the buoyancy and drag forces, and an excitation force on the 2DOF spring-damper were examined in [
23]. All resonance cases were characterized, in which the solutions at the steady state were verified in view of the conditions of solvability. The dynamical motion of a tuned absorber was studied in [
24], in which the PTMS was applied to obtain the approximate solutions up to the third order for the case of a movable pivot point on an ellipse with a stationary angular velocity. The modulation equations were derived and reduced to two algebraic equations in order to investigate the stability of the fixed points according to selected data of the considered system.
Several studies [
25,
26,
27,
28,
29,
30,
31] have investigated the Duffing pendulum systems about the primary and secondary resonances using analytical approaches or numerical analysis. The responses of an auto-parametric system containing a spring, mass, and damper was studied in [
25] using the HBM. The approximate results of another auto-parametric system consisting of a damped pendulum connected to a non-linear vibrating oscillator near the region of principal resonance were investigated in [
26]. In ref. [
27], the author examined the oscillations of a parametrically self-excited 2DOF dynamical system consisting of coupled oscillators identified by self-excitation, with the non-linearity of a Duffing type. The vibrational analysis of a mechanical system similar to an auto-parametric system subjected to an external harmonic excitation was investigated in [
28]. The authors reported that a semi-active magnetic damper and a non-linear spring acted on the system to improve its dynamics and control movements. The analytic solutions of this system were obtained in [
29] using the HBM, and they were verified according to comparison with the numerical results. The discussion of the vibration mitigation and energy harvesting of the same system is found in [
30], in which the concept of energy harvesting is closer to the vibration absorber concept. In ref. [
31], the dynamics of a pendulum suspended on a forced Duffing oscillator were investigated using numerical analysis. The bifurcation analysis of the pendulum was also performed.
This paper focuses on the motion of a novel three DOF auto-parametric dynamical system consisting of a damped spring pendulum as the secondary system suspended with a forced non-linear Duffing damping oscillator as the primary system. The governing EOM are derived using the second kind of Lagrange’s equations according to the generalized coordinates of the considered system. The PTMS is used to solve the EOM analytically up to the third order of approximation and to obtain more accurate results. All cases of resonance are categorized, in which the case of primary external resonance is examined to obtain the conditions of solvability besides the modulation equations. The time histories of the modified amplitudes, the modified phases, the achieved results, resonance curves, and the path’s projections on selected space planes are graphed to describe the impact of the system’s parameters on the motion. The stability and instability regions in view of the investigated resonance case are presented using the Routh–Hurwitz criterion [
32]. The results of this work are generalized as the previous results in [
5,
31] for the case of the motion of a rigid pendulum without any effectiveness of force and moment. These results have a significant impact in special dampers mounted in buildings, applied in the opposite directions of river vortices or earthquakes, and in the applications of pendulums that are mounted on bridge towers.
2. Formulation of the Dynamical System
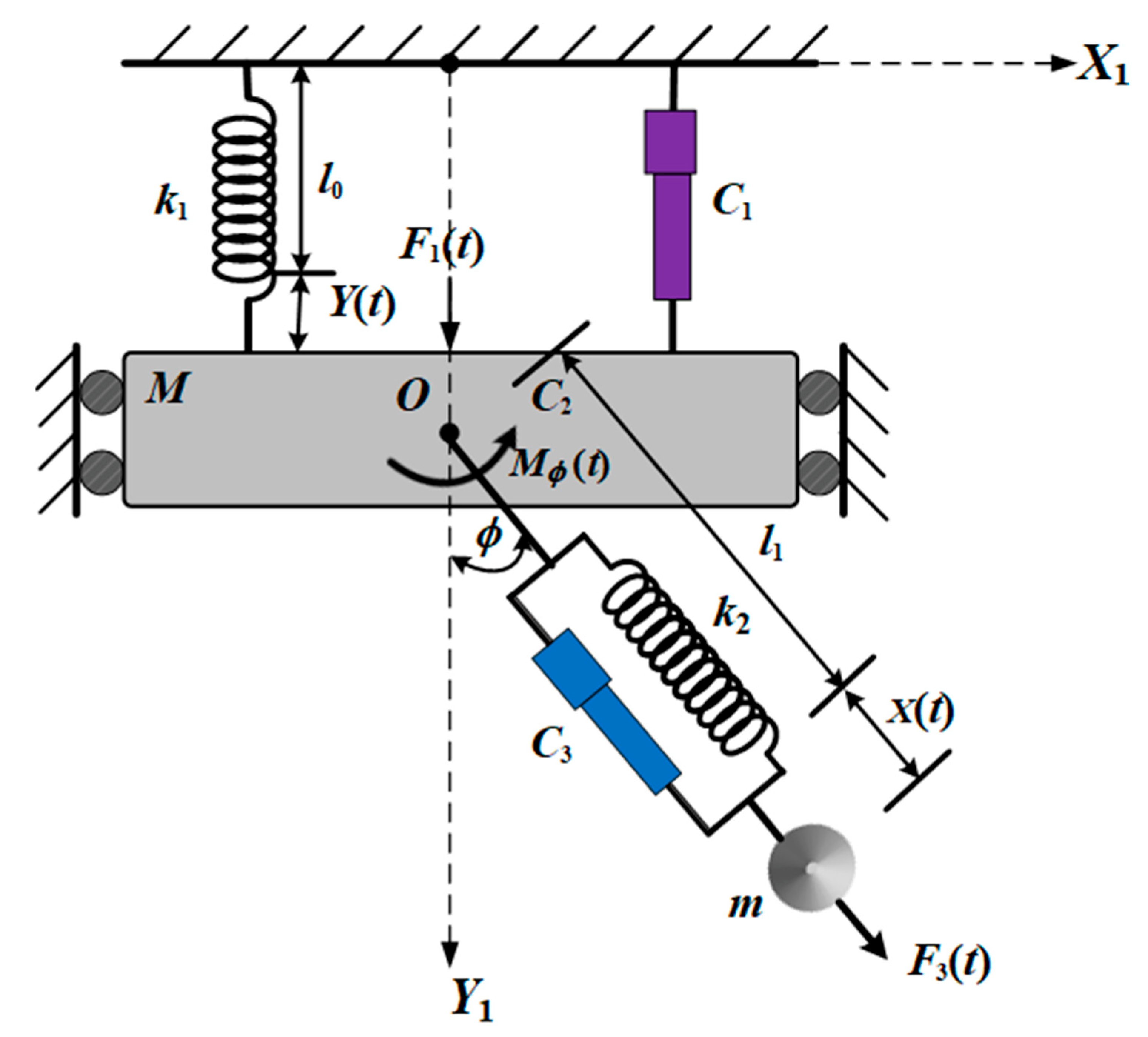
Let us consider the dynamical vibrations of an auto-parametric system consisting of an excited Duffing oscillator with normal length
, static elongation
, stiffness
, and mass
that is periodically forced to move vertically as a primary system. The secondary system is a damped spring pendulum with normal length
, static elongation
, stiffness
, and mass
. This spring is connected to the Duffing oscillator at a point
. Let
denote the elongation of the Duffing oscillator and
represent the rotation angle of the spring that lies between the downward vertical
-axis and the direction of the spring’s elongation
(see
Figure 1).
Moreover, we consider that the motion is influenced by external linear excitation forces, and , and an excitation moment that are acting on the masses and at the point , respectively. Here, , and are the frequencies of , and , respectively. The investigated auto-parametric system is damped by viscous forces and moments , and , in which , and are the respective coefficients of the viscous damping.
Based on the above description, we can write the potential energy
and kinetic energy
as follows:
where
is the acceleration of Earth’s gravitational force and the dots are time derivatives.
The governing EOM can be derived using the following Lagrange’s Equations:
Here,
is the Lagrange’s function,
and
are the system’s generalized coordinates and their corresponding velocities, respectively, and
are the generalized forces which are formed as follows:
Consider the following definitions of the dimensionless parameters:
The substitution of Equations (1), (3) and (4) into the system of Equation (2) produces the following dimensionless form of the EOM:
The inspection of the system of Equations (5)–(7) shows that the governing EOM consists of three non-linear ordinary differential equations (ODE) in terms of , and .
3. The Perturbation Technique
The main objective of the present section is to obtain the approximate analytic solutions of the EOM (5)–(7) using the PTMS to address the cases of resonance, obtain the conditions of solvability, and achieve the equations of the modulations. Therefore, we can approximate the functions
and
in Equations (5)–(7) using a Taylor series according to their first terms, for which these approximations are valid in a small neighborhood of the position of static equilibrium [
33]. Then, Equations (5)–(7) become:
Based on the motion in a small neighborhood of the static equilibrium position, we consider a small parameter
, in which the parameters
, and
can be rewritten in terms of new variables,
, and
, respectively, according to the following forms:
According to PTMS, we can seek the approximate solutions of the variables
, and
in the following forms [
34]:
where
are various time scales, in which
and
are defined as fast and slow time scales, respectively. Therefore, the time derivatives regarding
can be transformed according to the time scales
as the following chain rule:
where terms of
and higher are neglected due to their minuteness.
As before, we consider the minuteness of the amplitudes of external forces and moments
, as well as the coefficients of damping
. Therefore, we can write:
Furthermore, we consider the following:
where the amounts
, and
are of order unity.
Substituting the new variables into Equations of system (11), the assumed solutions (12), the transformations (13), and the use of the parameters of Equations (14) and (15) into the EOM (8)–(10) and equating the coefficients of like powers of in each side obtains the following groups of partial differential equations (PDEs):
The above nine PDE (16)–(24) can be solved sequentially one by one. Consequently, the general solutions of Equations (16) and (17) are:
The substitution of Equation (25) into Equation (18) yields a nonhomogeneous equation, and its solution can be written in the form:
where
represent unknown complex functions of the slow time scales
, while
are the complex conjugates of these functions.
The substitution of the first-order solutions of Equations (25)–(27) into Equations (19)–(21) yields secular terms. The elimination of these terms demands that:
According to these conditions, the second-order solutions have the following forms:
Here, represents the complex conjugates of the preceding terms.
After grasping the above procedure, we can obtain another condition for eliminating the secular terms by substituting the solutions from Equations (25)–(27), (30) and (31) into Equation (21), in the following form:
Therefore, the solution
has the form:
Making use of the previous solutions to Equations (25)–(27), (30), (31) and (33) and the third-order approximate Equations (22)–(24), secular terms are produced. The eliminating conditions of these terms required that:
Based on the previous conditions of Equations (34)–(36), the approximate third-order solutions turn into:
where
are functions of
and
(see
Appendix A).
According to the removal conditions of secular terms, Equations (34)–(36), and the following initial conditions, we can estimate the functions
:
where
are known values.
Now, we will investigate the arising cases of resonance according to the previous approximate solutions. These cases can be categorized into primary (main) external resonance, which takes place at , and internal resonance, which occurs at .
In this situation, we investigate the three primary external resonances,
, and
, simultaneously. These resonances depict the closeness of
and
to
and
, respectively. Therefore, detuning parameters
can be introduced according to:
Since the detuning parameters are known as the distances from the oscillations to the strict resonance [
35,
36], we can use the small parameter
to express these parameters as follows:
Substituting parameters (41) and (42) into Equations (8)–(10) and removing the produced secular terms obtains the following conditions of solvability:
It is obvious that these conditions constitute a system of three non-linear PDEs in terms of the functions
, in which
. Therefore, we can write them in polar forms as follows:
Here, and are real functions of the amplitudes and phases, respectively, for the functions and , while are the amplitudes of , and , as presented in the assumptions of Equations (11) and (12).
Making use of the following modified phases:
and the time derivative operators (13), we can transform the PDE system (43) into another ODE system. The separation of the real and imaginary parts of the resulting system yields the following six ODEs from the first order that describe the modulation equations in terms of modified phases
and amplitudes
in the following forms:
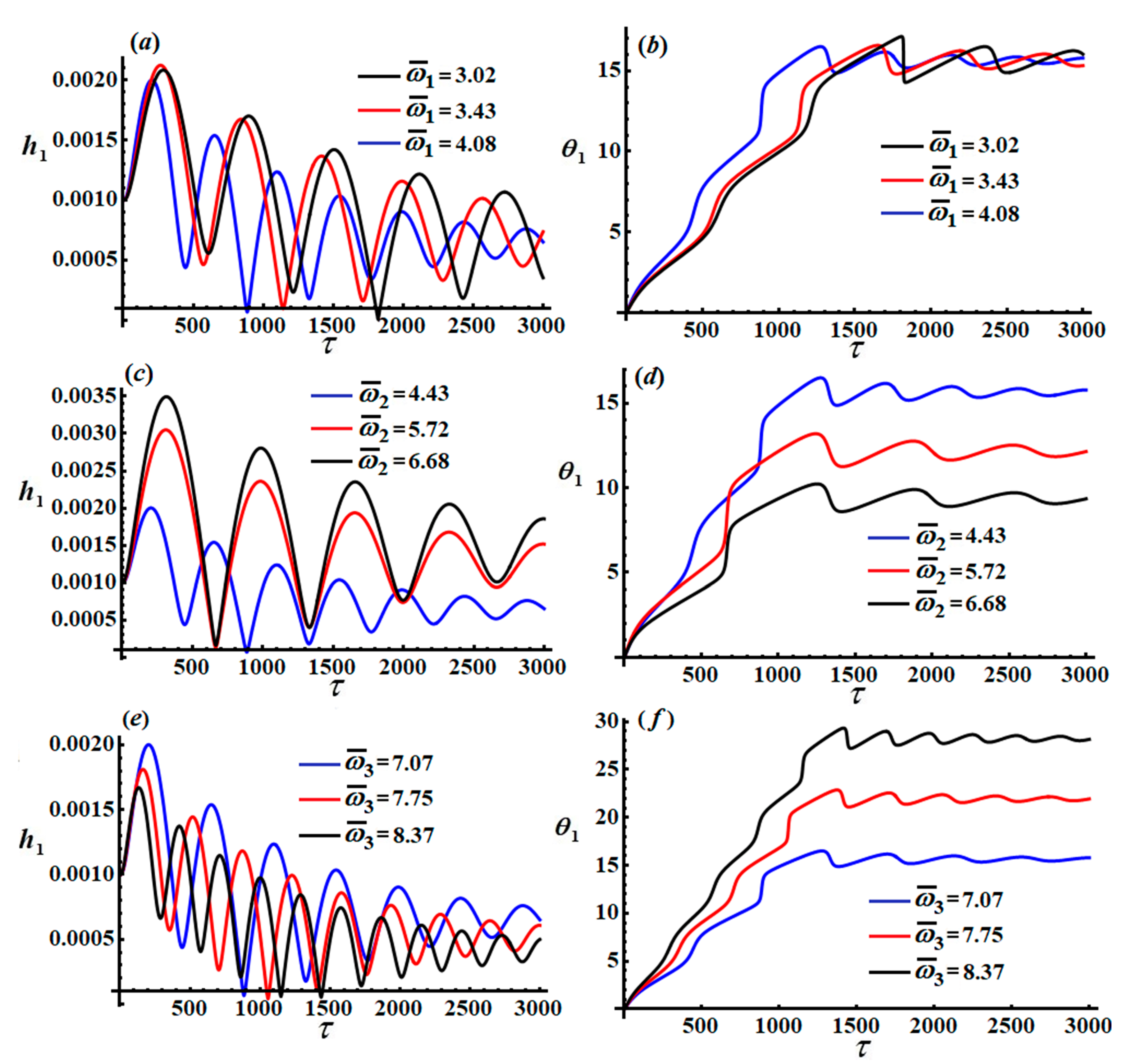
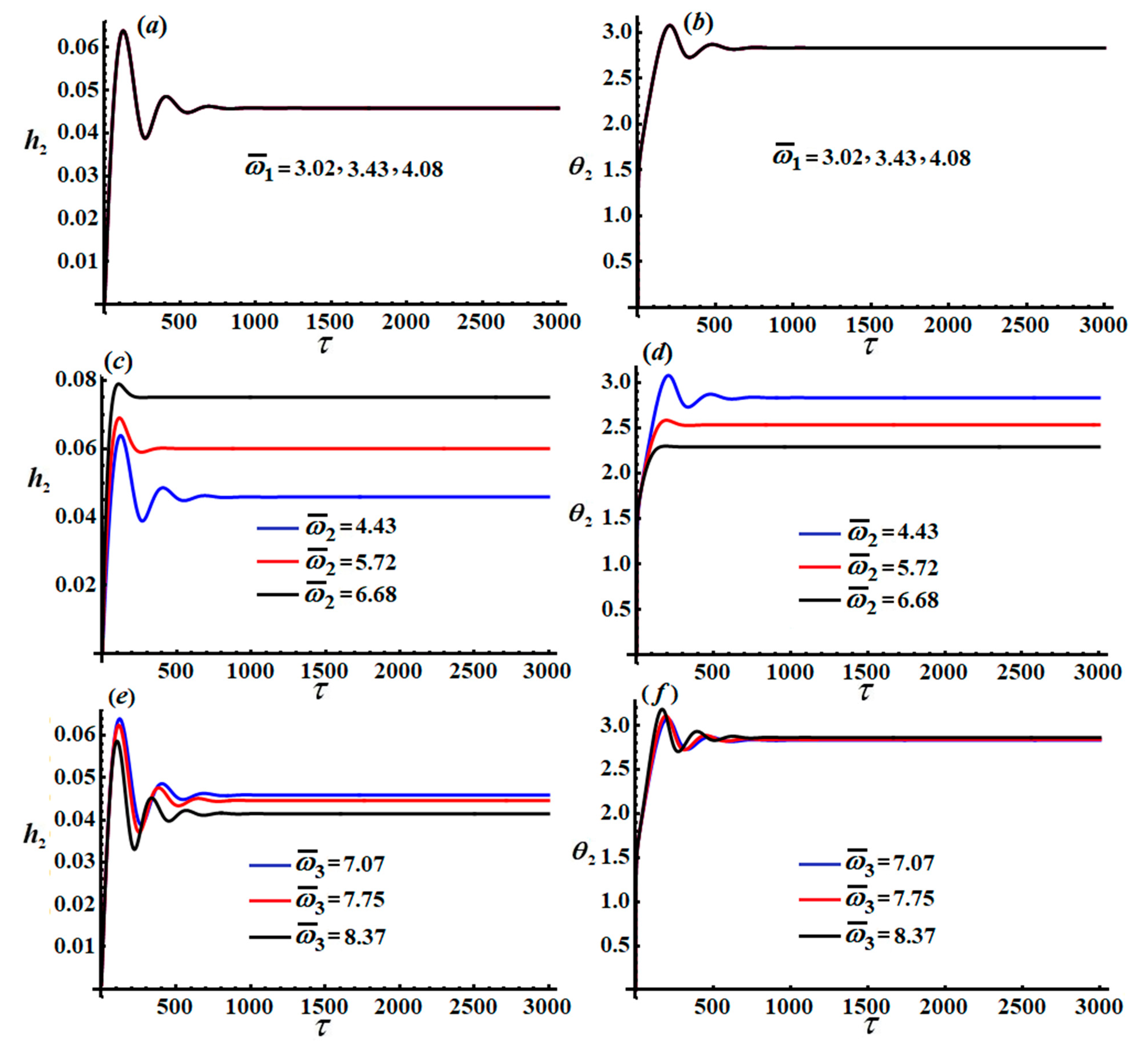
According to the conditions (40), we can solve the above modulation in Equation (46). The time histories of the amplitudes
and the modified phases
are portrayed in
Figure 2,
Figure 3 and
Figure 4, according to the uses of the following data:
These figures were calculated for different values of
and
as in the parts [(
a), (
b)], [(
c), (
d)], and [(
e), (
f)], respectively. The oscillations of the waves describing
and
decrease with increasing time, behaving in a decay manner as seen in
Figure 2 and
Figure 4, while the variation of the amplitude
behaves in the form of steady-state motion as shown in
Figure 3. On the other hand, the variation of the modified phases
increases with time to a specified value, then it tends to exhibit a stationary behavior, as portrayed in
Figure 2,
Figure 3 and
Figure 4. The conclusion that can be made here is that the modified amplitudes and phases behave in a stable manner.
Figure 5,
Figure 6 and
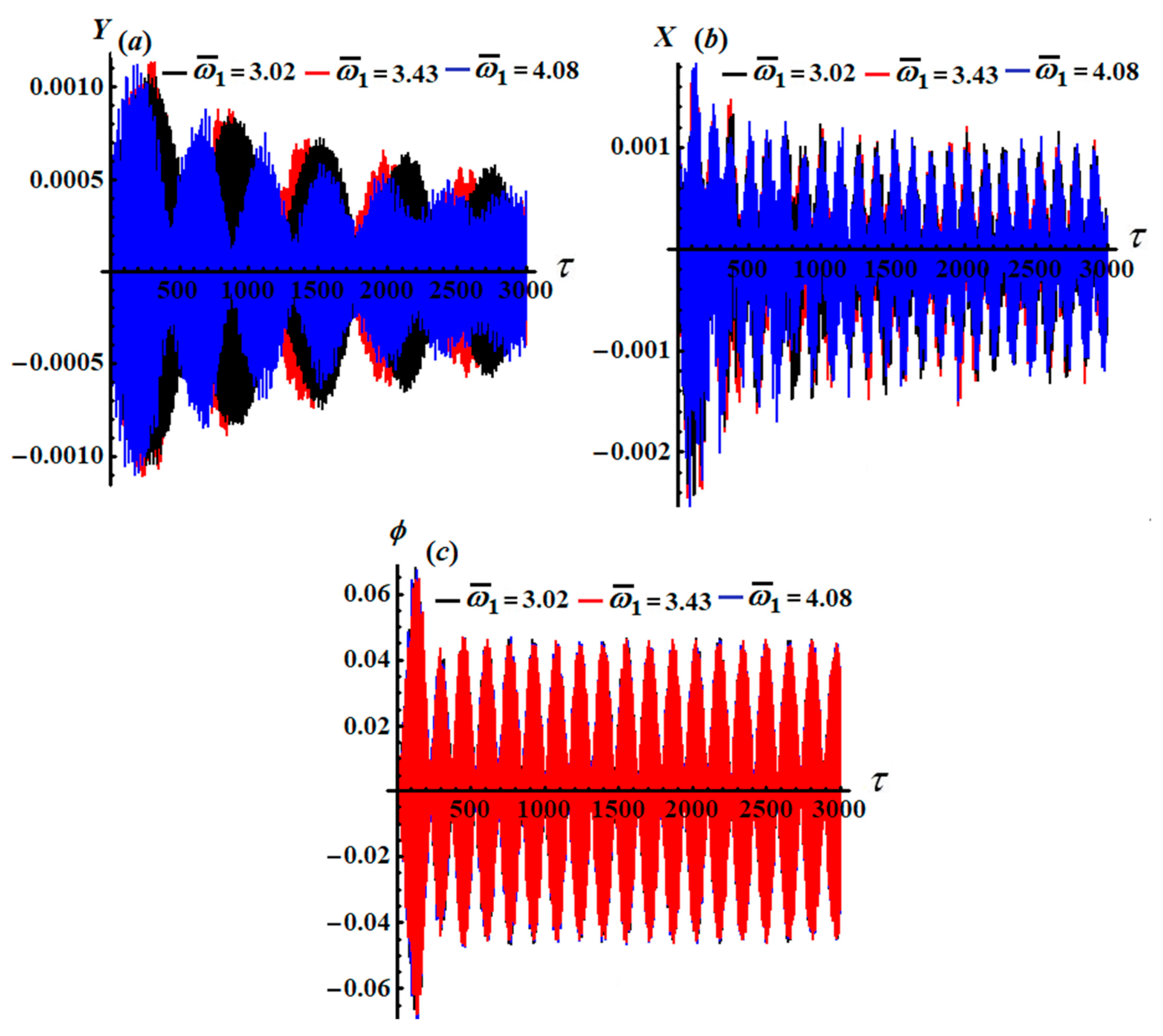
Figure 7 illustrate the time histories of the attained approximate analytic solutions of
, and
till the third order of approximation. These figures were drawn when the previously used data with various values of
were used. According to the plotted curves in these figures, we can conclude that these curves have periodic or quasi-periodic forms of wave packets, in which their amplitudes increase (see
Figure 5 and
Figure 7) and decrease, as shown in
Figure 6, with the passage of time until the waves behave in the form of stationary waves at the end of the examined period of time.
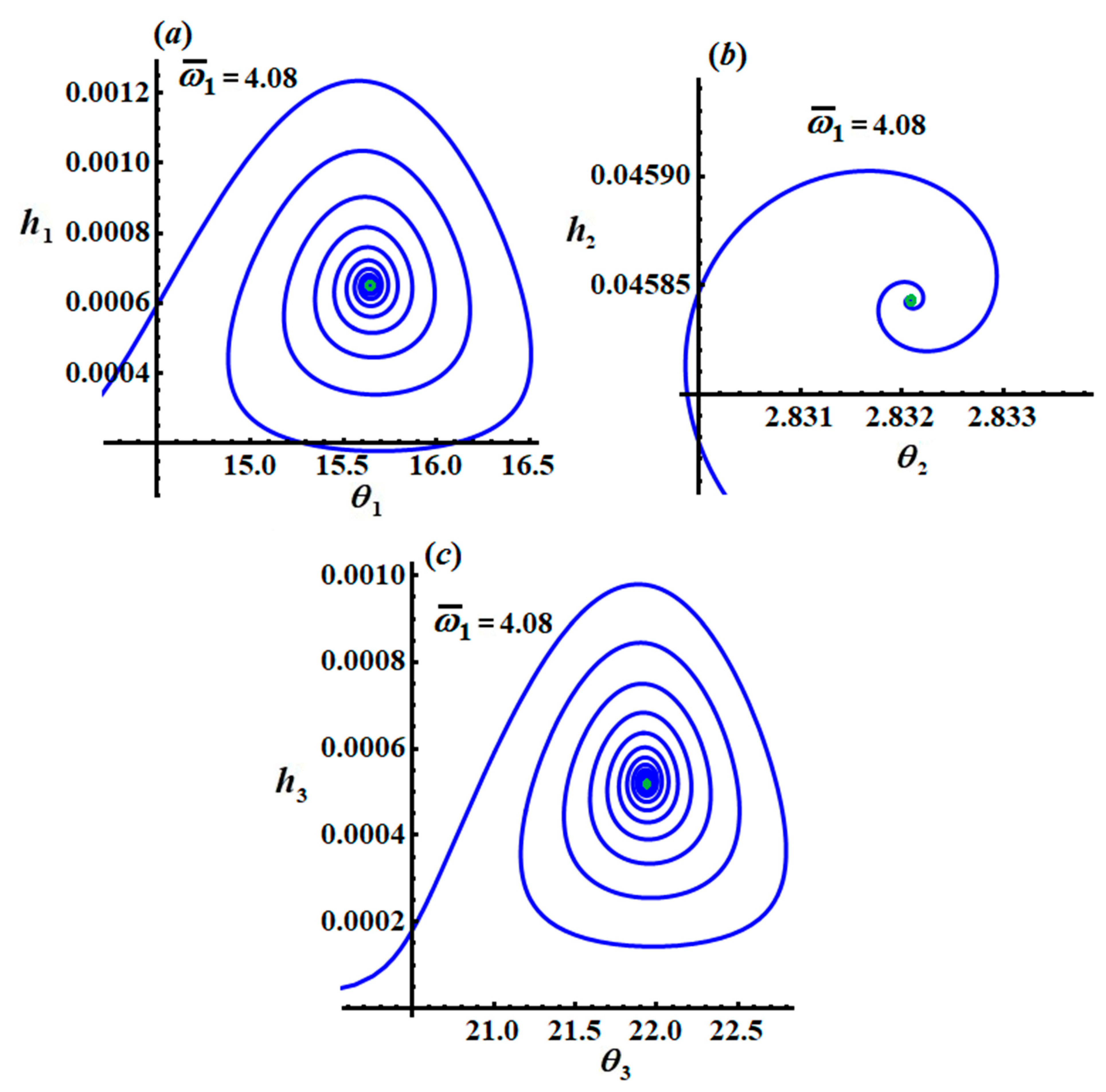
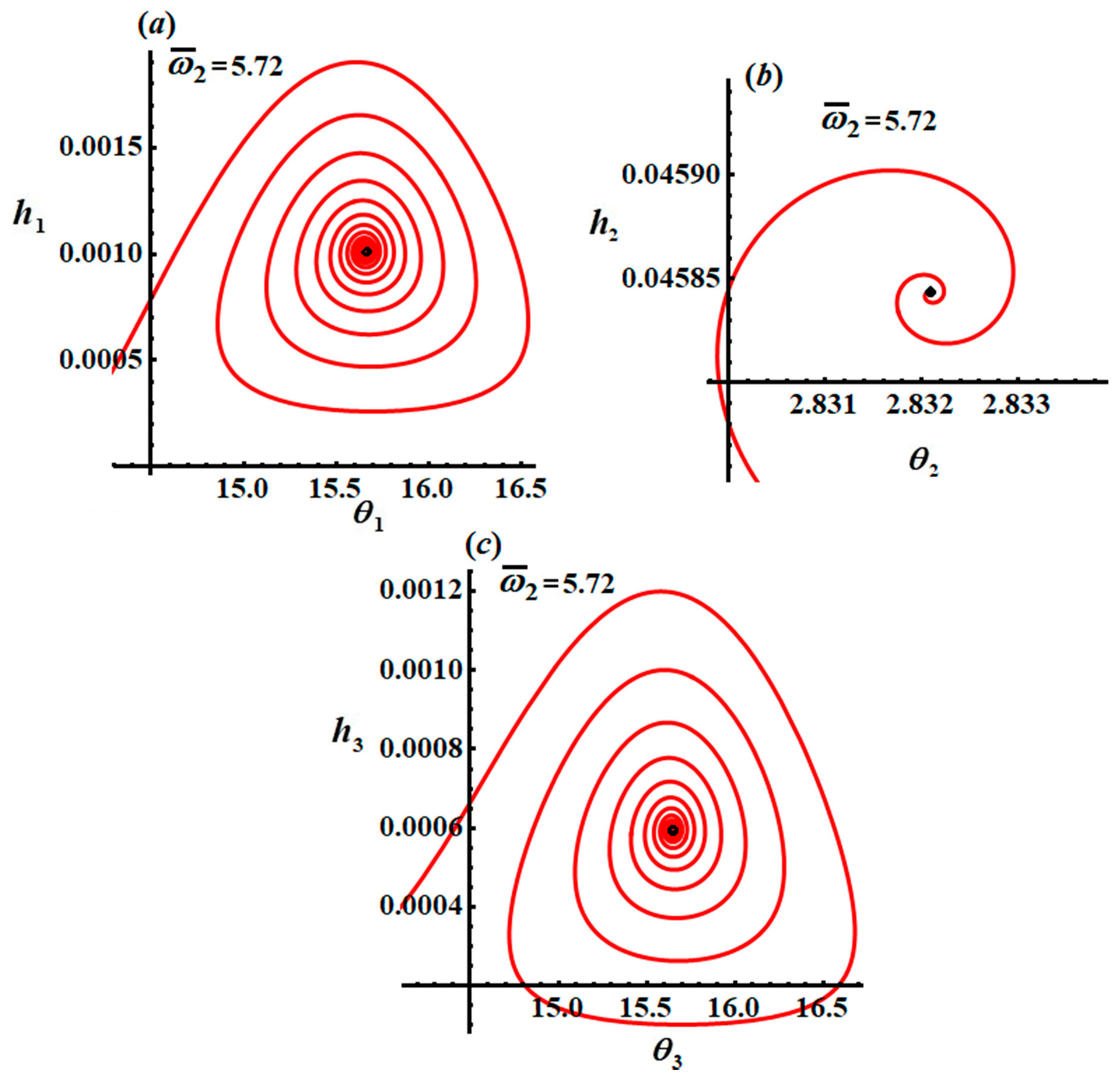
To follow up on the vibrations of the examined system to investigate whether it is stable and to understand the specific transference of motion, the system of Equation (46) permits us to focus on this knowledge. The plotted trajectories of the modified amplitudes and phases are regarded as the best way to depict the system’s behavior.
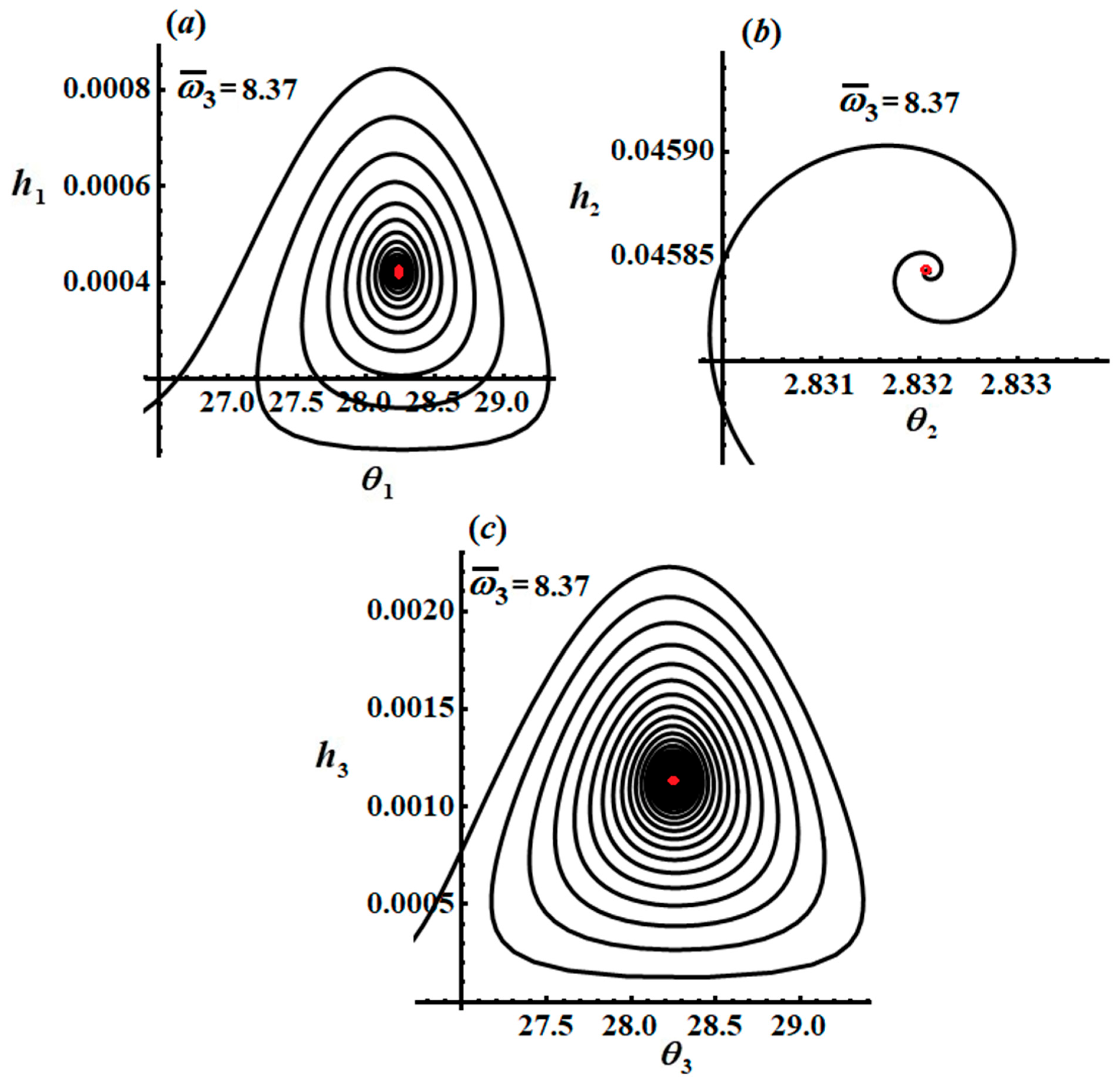
The track projections on specific space planes are plotted in
Figure 8,
Figure 9 and
Figure 10, when
, and
, respectively. The curves of these figures have spiral forms toward one point, in which the green, black, and red solid points in these figures refer to a stable state. After the transient state, we find that all pathways tend to have steady-state behavior.
4. Solutions in the Steady State
The main objective of this section is to examine the oscillations of the considered system in the steady state. It is known that this case is generated when the transient processes disappear due to the presence of damping [
37,
38]. Then, we consider the zero value of the left hand side of Equation (46), i.e.,
. Therefore, we can easily obtain the following system of six algebraic equations:
A closer look into this system shows that if we remove the phases , the following non-linear algebraic equations of amplitudes and frequencies are obtained:
For further investigation of the stability, we will examine the behavior of the dynamical system in a region close to the fixed points. To complete this task, we will consider the following forms of amplitudes and phases:
where
, and
are the solutions in the steady state, while
, and
are the corresponding perturbations, which are assumed to be very small.
The substitution of Equation (49) into Equation (46) yields the following equations:
where:
Based on the minuteness of the perturbation functions , and , we can express each solution in the form of a linear combination of , where and are constants and the eigenvalue of the unknown perturbation, respectively.
If the solutions in the steady state (fixed points)
, and
are stable asymptotically, then the real parts of the roots of the following characteristic equation must be negative:
where
are functions depending on the parameters
, and
(see
Appendix B).
Referring to the above, the substantial conditions for the stability of the solutions in the steady state can be written according to the criterion of Routh–Hurwitz [
32] in the following forms:
5. Non-Linear Analysis of Stability
The main aim of this section is to investigate the stability analysis of the considered system using the non-linear stability approach of Routh–Hurwitz. The examined system is exposed to various forces and moments, such as the excited harmonic forces
and the moment
. It is found that the natural frequencies
damping coefficients
, and the parameters of detuning perform a crucial destabilizing role in the criteria’s stability. To plot the stability diagrams of the system of Equation (46), the previous values of the different parameters are used. The modified amplitudes
are shown with the detuning parameter
in
Figure 11,
Figure 12,
Figure 13 and
Figure 14 for different values of
when
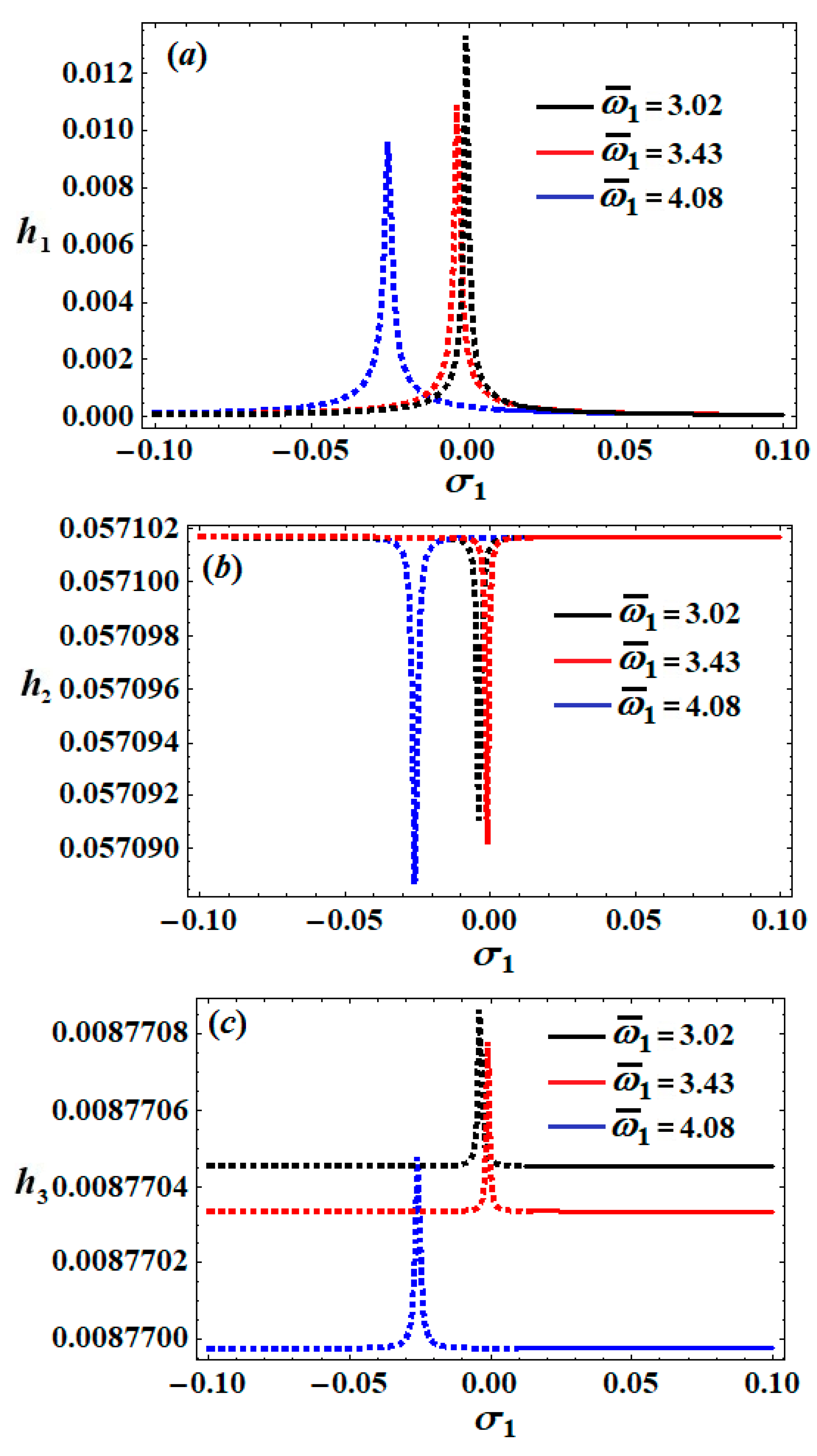
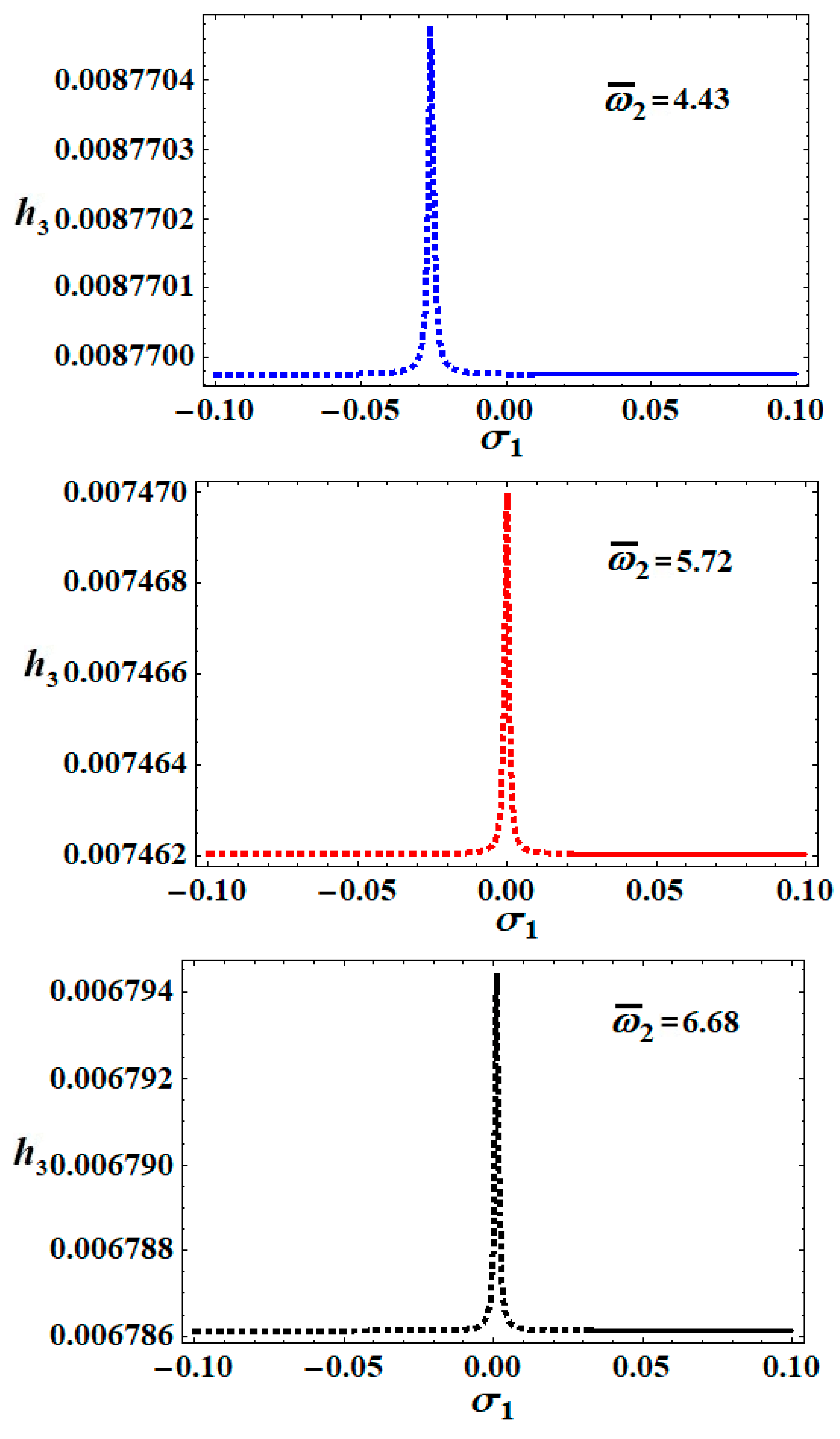
. The outlined curves of these figures contain the possible fixed points. Resonance curves are plotted in
Figure 11,
Figure 12,
Figure 13 and
Figure 14 according to the previous data of parameters.
Each of the resonance curves has different stable and unstable regions with the various values of the natural frequencies
and
(see
Figure 11,
Figure 12,
Figure 13 and
Figure 14). More precisely, the inspection of parts of
Figure 11 shows that the instability and stability ranges are
and
, respectively, as indicated in
Figure 11 in blue. On the other hand, when
, the red curves represent the instability and stability ranges of
and
, respectively, while the black curves represent the areas of instability and stability when
, which are
and
, respectively. The included curves of each part have different fixed points associated with the different values of
, as indicated in
Figure 11. Moreover, the instability regions decrease with an increase in the value of
, due to the impact of the natural frequency
.
Figure 12 illustrates the different ranges of stability criterion, where the instability and stability areas, indicated in blue, are determined according to the ranges
and
, respectively. At
, the red curves show the instability and stability areas with ranges
and
, respectively, while the black curves show the instability and stability areas at
, which are
and
, respectively.
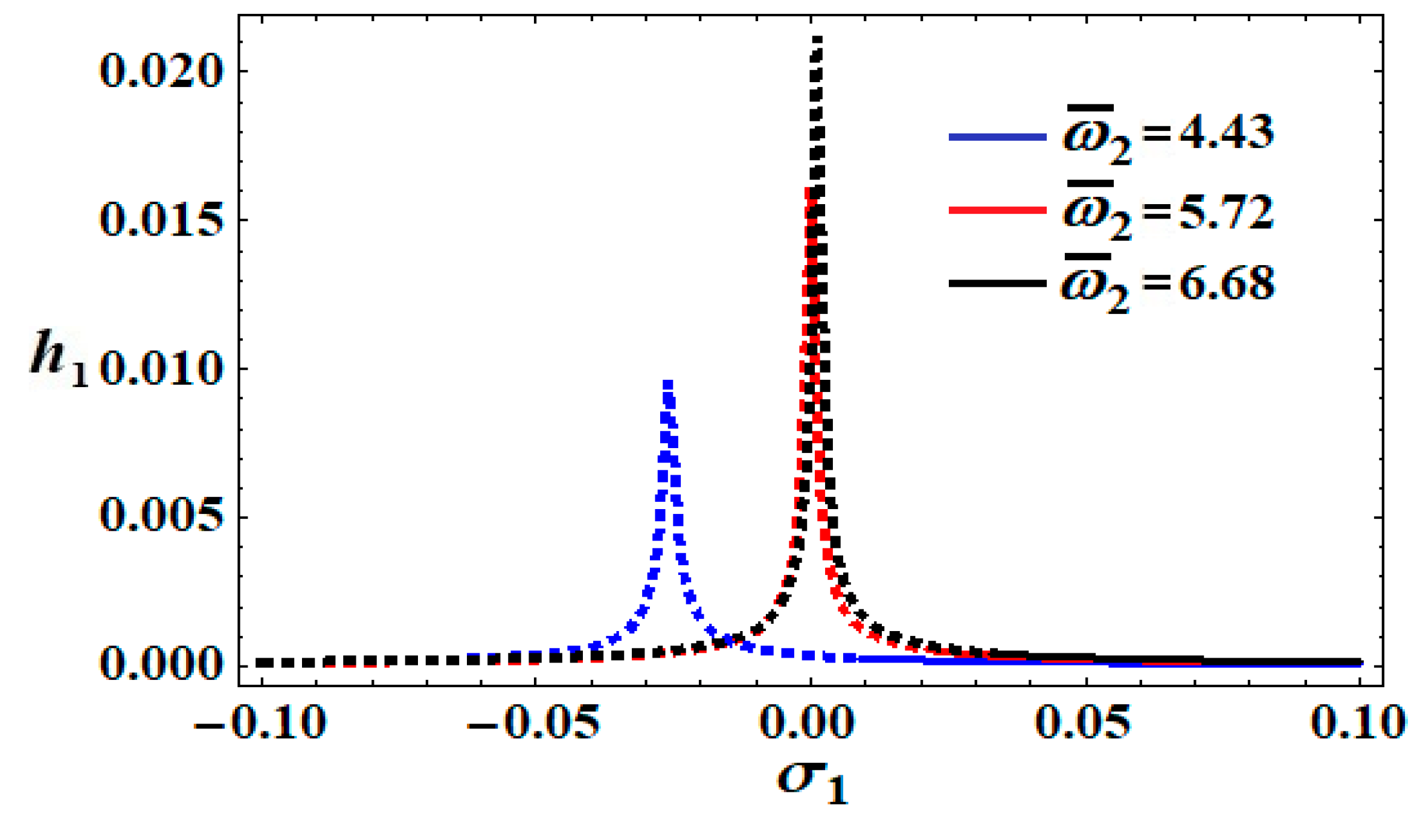
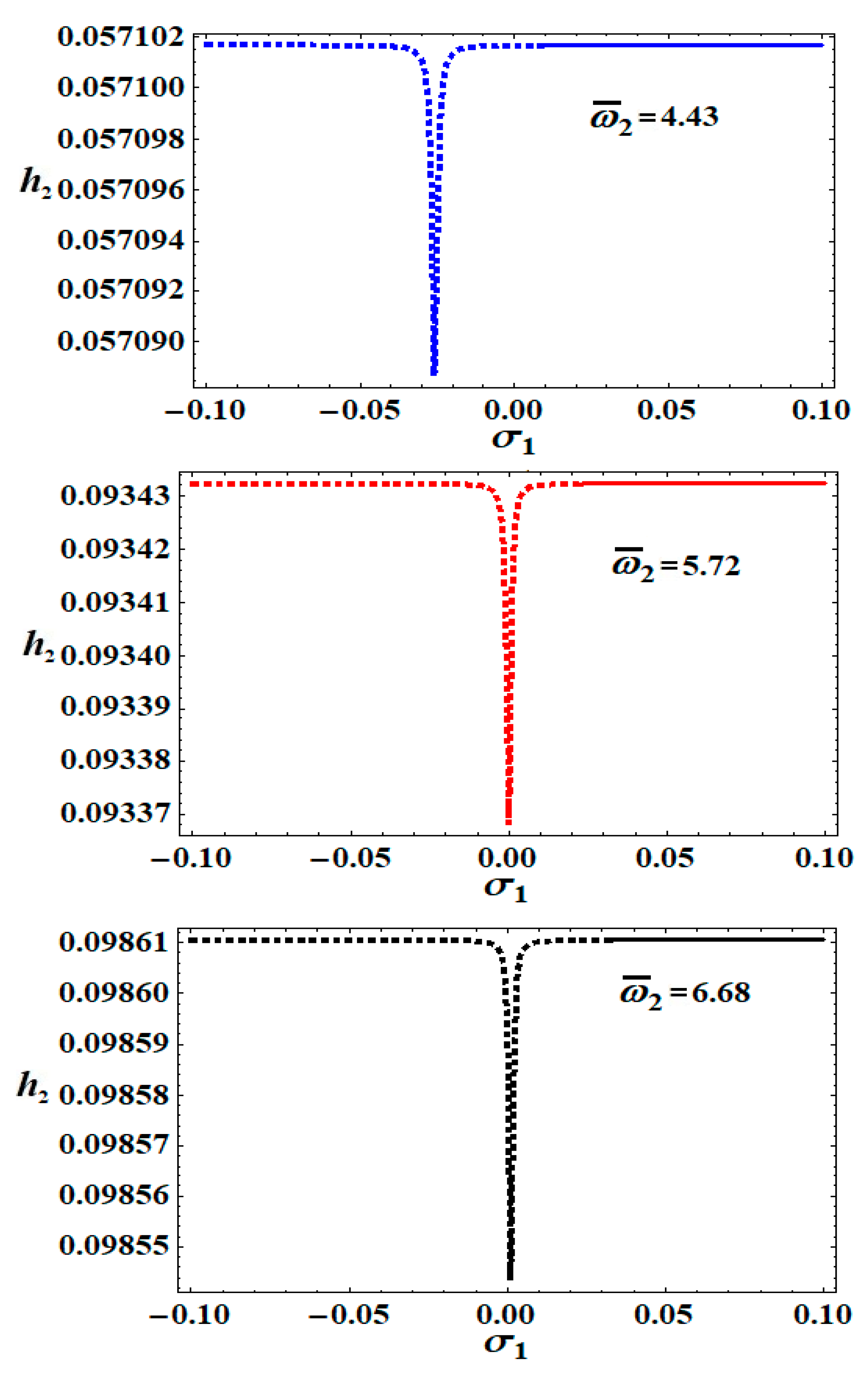
According to the calculations of the graphed curves in
Figure 13 and
Figure 14, we can state that three different peak fixed points are produced when
has different values for the resonance curves of
and
, which are varied with
. The instability and the stability areas become
and
, respectively, denoted in blue (see
Figure 13 and
Figure 14), while at
, the red curves indicate the instability and stability areas
and
, respectively. On the other hand, the black curves represent the areas of instability and stability when
, which are
and
, respectively.
To clarify the properties of the non-linear amplitudes of the system of Equations (46) and to examine their stabilities, we consider the following transformations [
39]:
where:
Substituting the operators (13) and the previous transformation (53) into the system of the ODE (46), we can equate the real parts and the imaginary parts with zero to obtain of the following system:
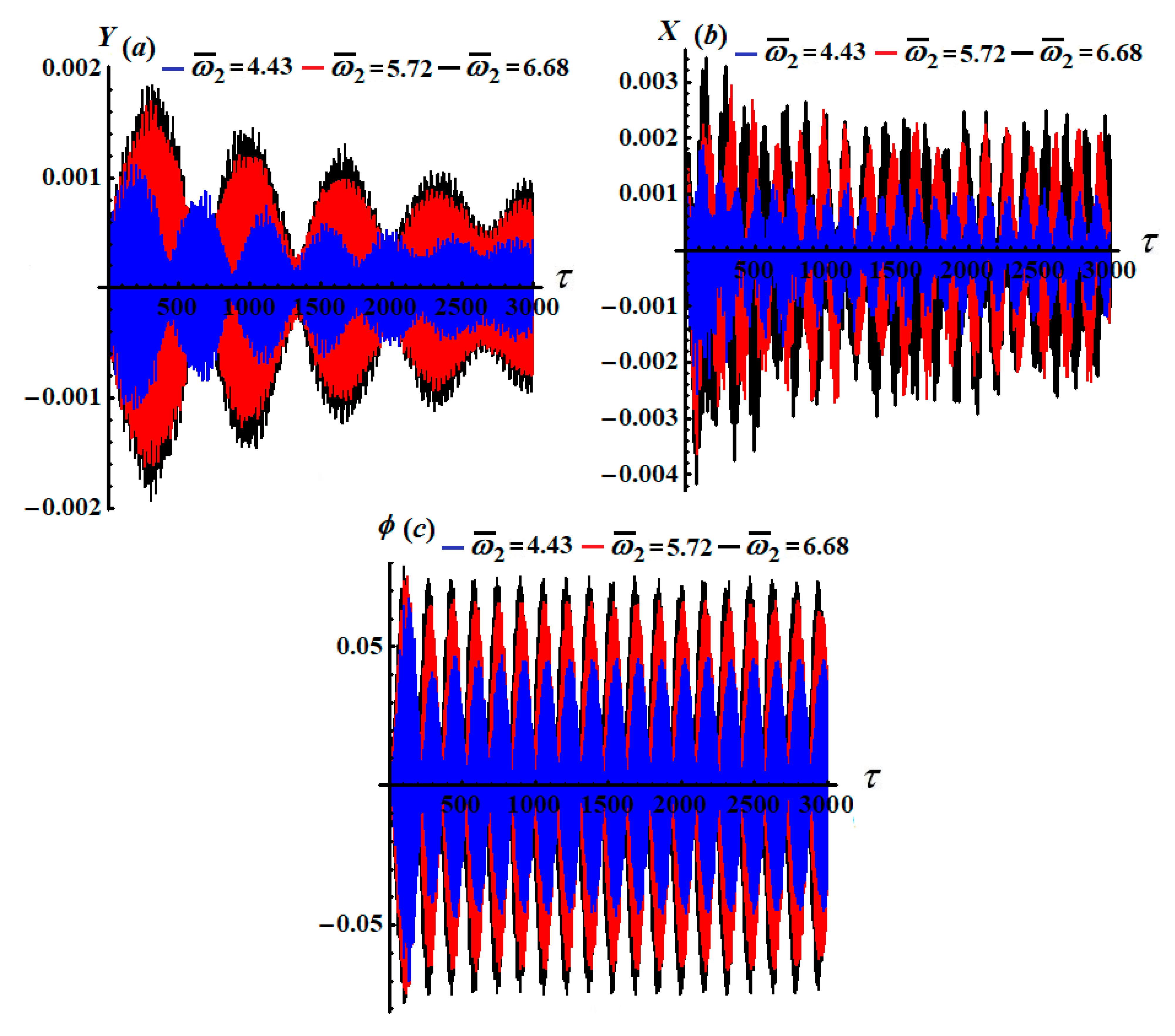
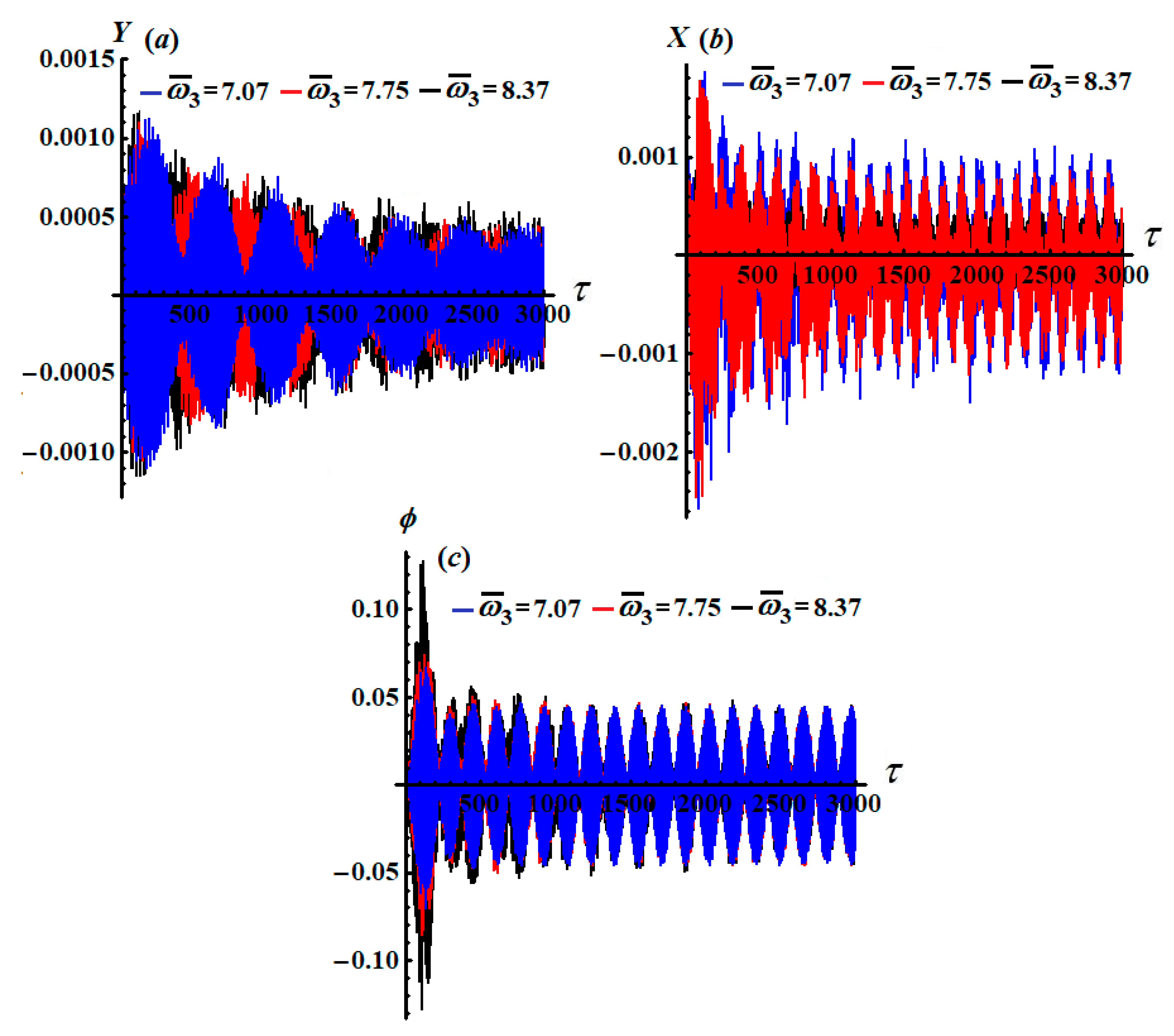
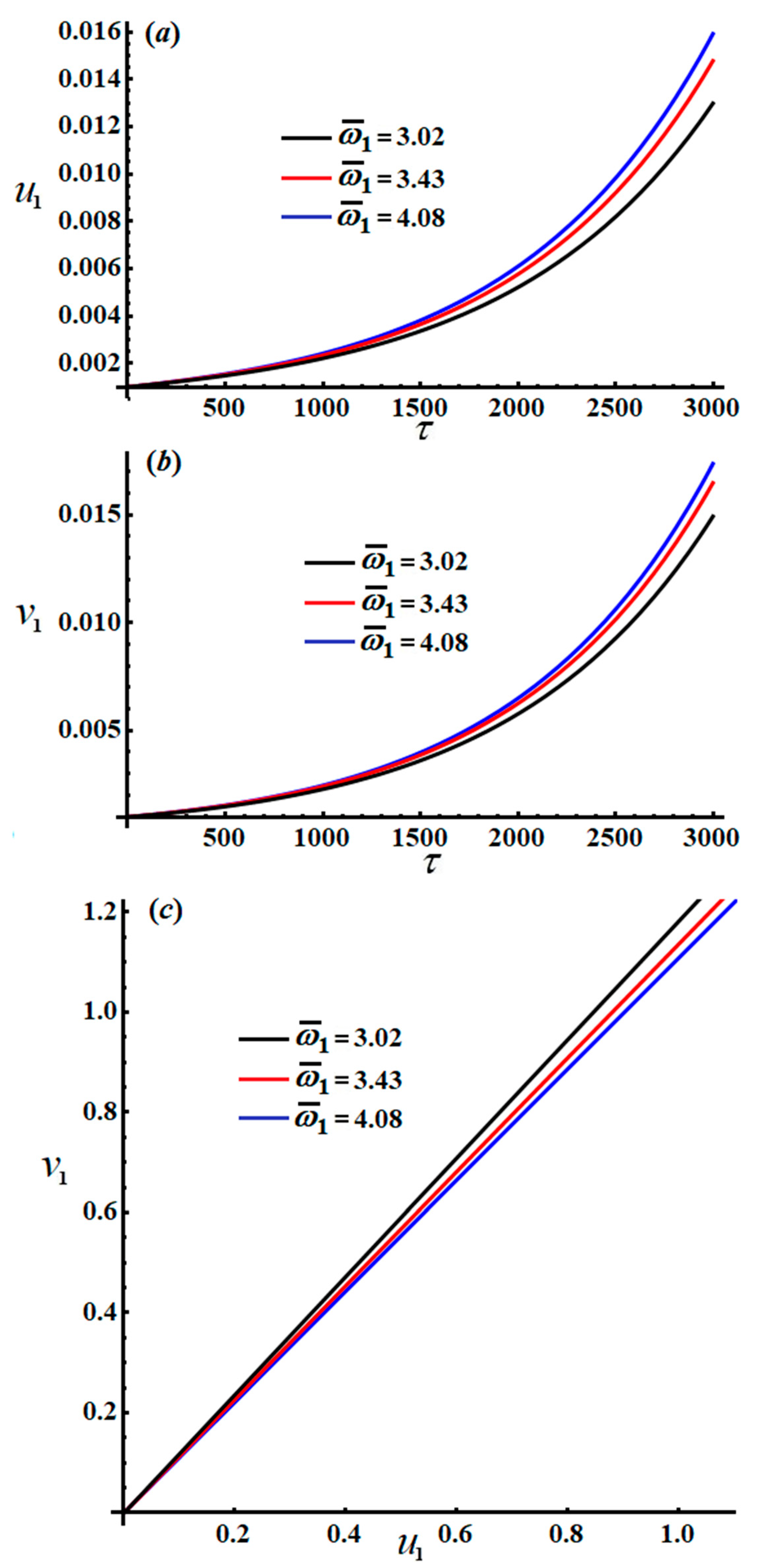
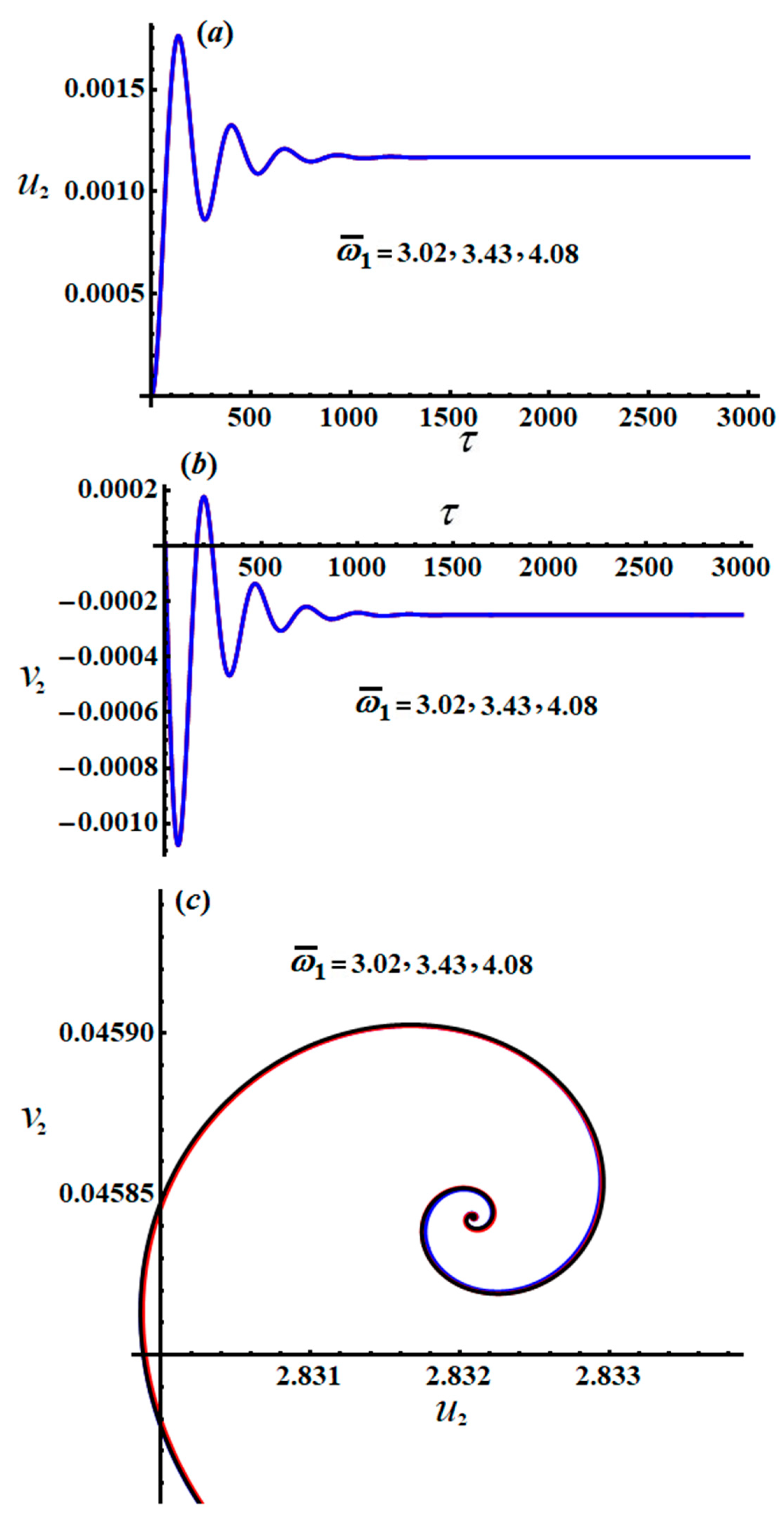
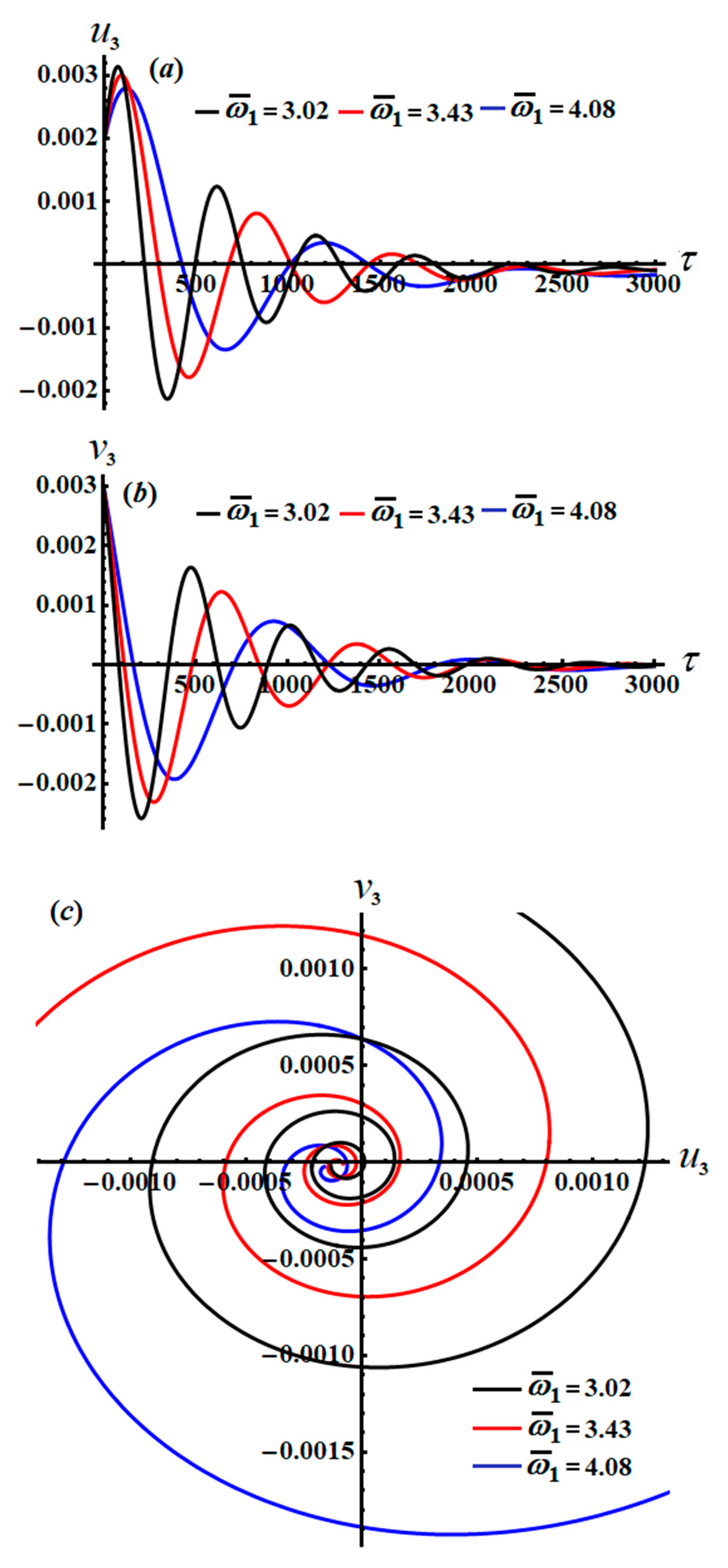
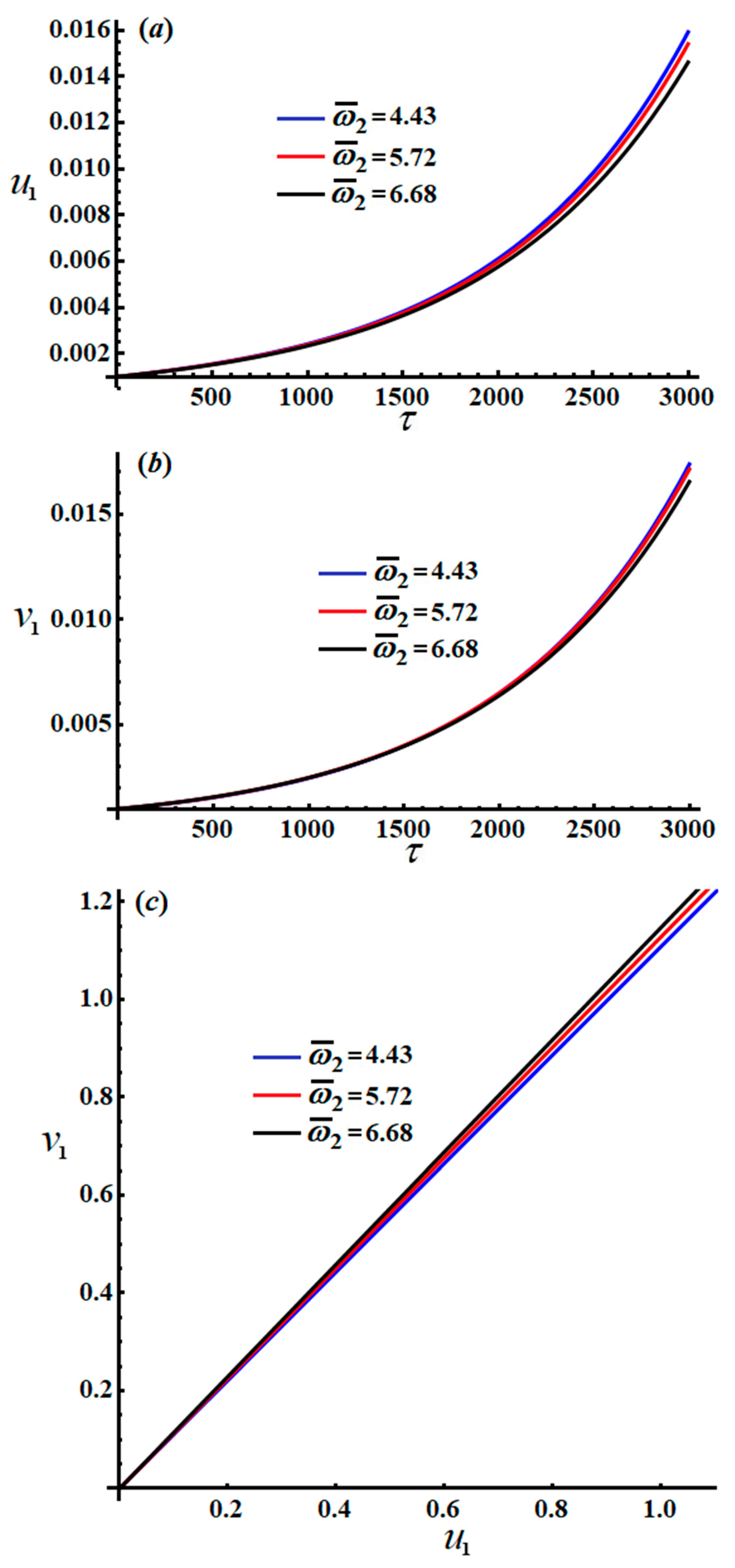
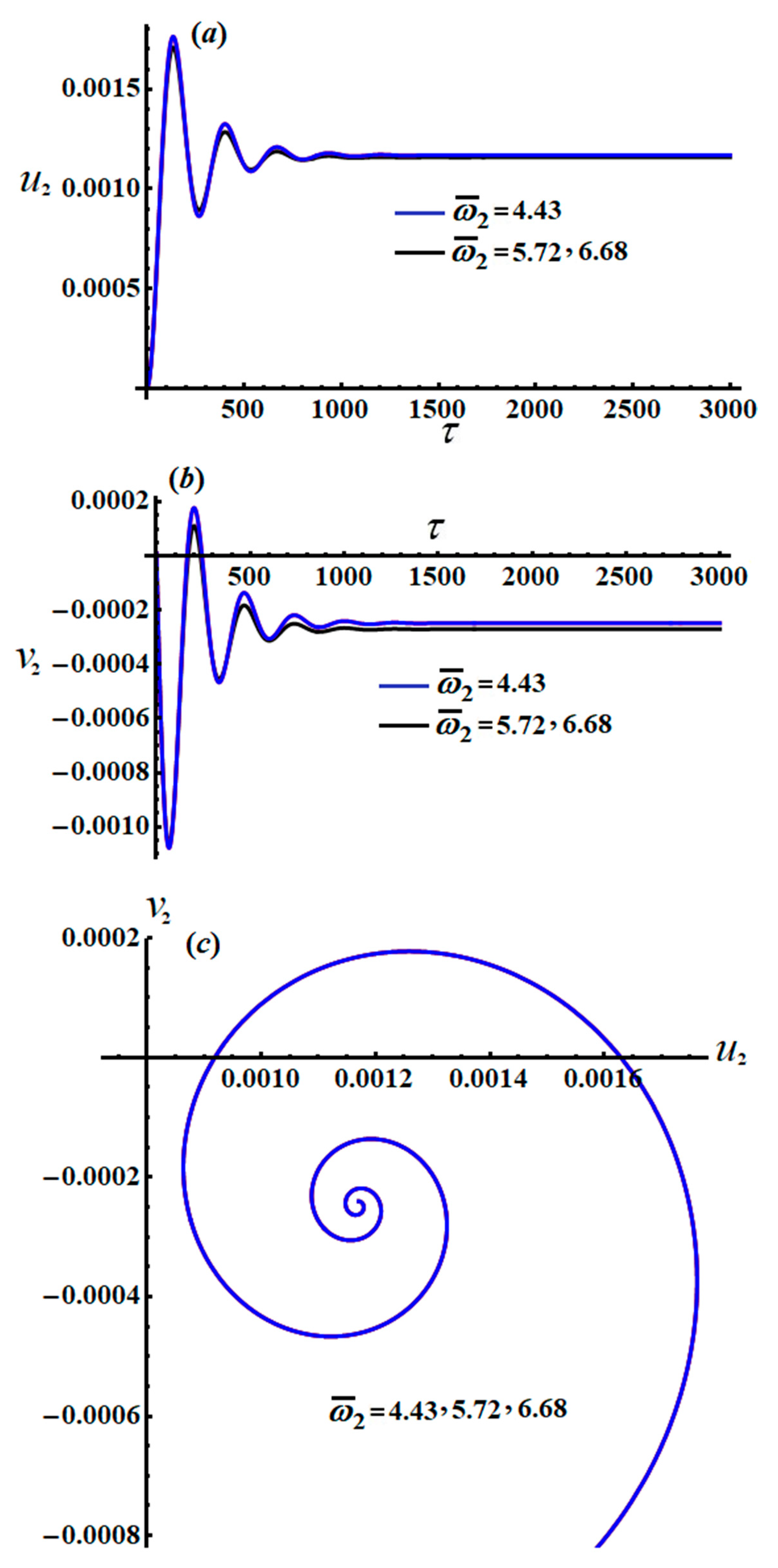
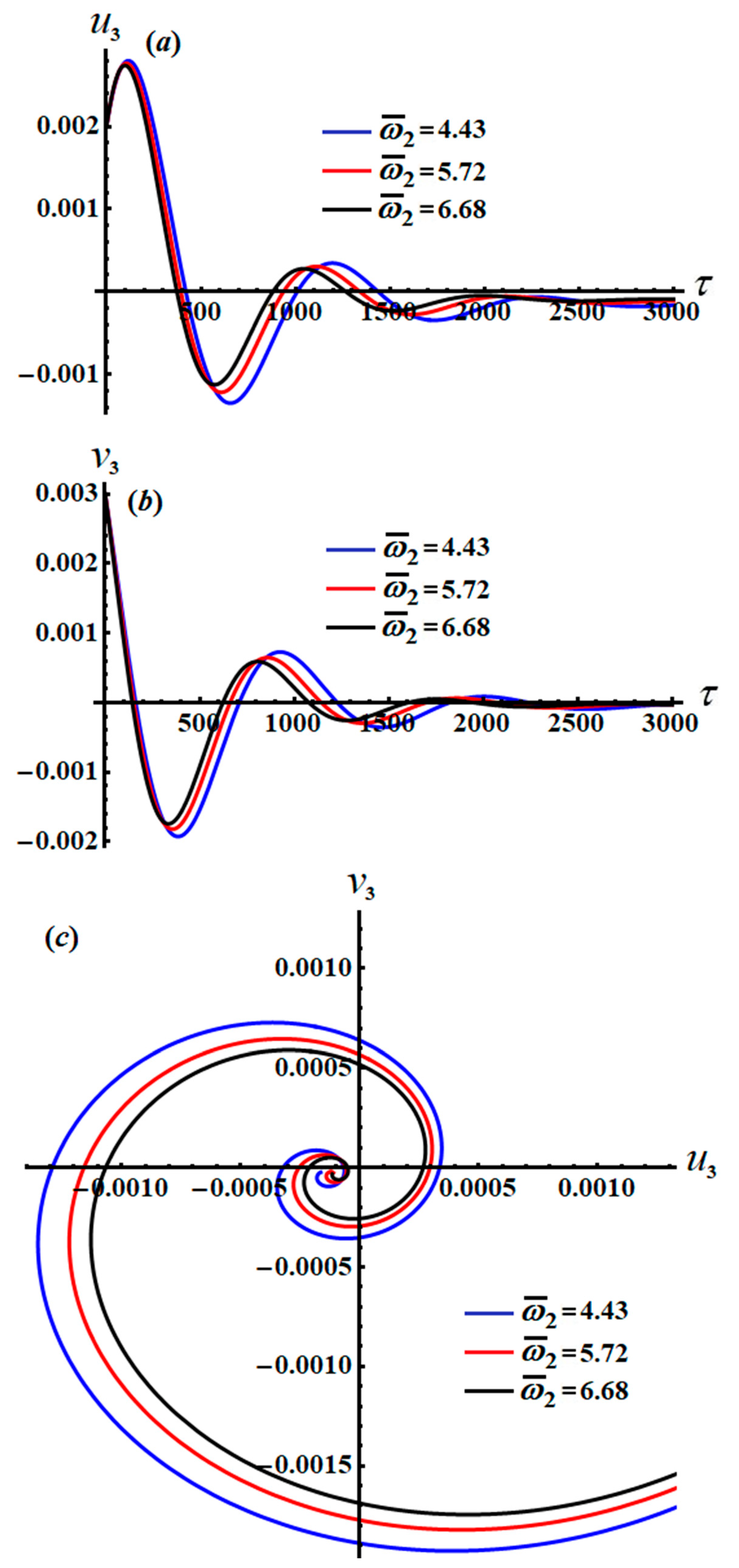
The modified amplitudes can be subsequently rationalized through the time in various parametric regions; the properties of the amplitudes are presented in phase plane curves shown in
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19 and
Figure 20, taking into account the data from previously used parameters.
Parts of
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19 and
Figure 20 explore the changing of the new justified phases
and
, as stated in the system of Equation (54), via
as shown in parts (
a) and (
b). The projections of the modulation equation trajectories on the phase planes
are graphed in part (
c) of these figures. The indicated curves of
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19 and
Figure 20 are calculated when
and
, respectively, besides the values of the detuning parameters
, and
.
The inspection of parts of
Figure 15 and
Figure 18 shows the time histories of
and the projections of the modulation equation trajectory on the phase plane
. It is clear that
and
increase gradually when time increases, and they behave in the form of a straight line due to the system of Equation (54). Conversely, the decay behavior of the waves describing the variation of
, and
is shown in
Figure 16a,b,
Figure 17a,b,
Figure 19a,b, and
Figure 20a,b, for different values of
and
. Spiral curves are plotted in the planes
and
in
Figure 16c.
Figure 16c in line with the equations of the system of Equation (54).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















