1. Introduction
An in-depth understanding of the human factor aspects of car driving operations is necessary, as they are responsible for safety [
1,
2] and affect the environment. Unfortunately, it is not easy to assess the influence of particular aspects of every single factor because of the complexity of human general and especially the technical knowledge, environmental awareness, motivation and behaviour. It is challenging to analyse how a driver’s personality, temperament, mental and physical condition influence driving. In addition, the habits that drivers have when operating vehicles, such as preferred speed and rate of acceleration, are very important [
3]. They all impose a significant impact on vehicle functioning and its effective use. Fuel consumption is critical and strongly affects air pollution and contributes to the greenhouse effect. It is possible to try to analyse the impact of the experience and skills of the driver in the driving of the vehicle and, if necessary, change them through training [
2,
4]. We usually do not consider people’s self-perceptions about their driving style or the associated beliefs. Around 50% of the participants in the research described in [
5] said they were trying to eco-drive or were eco-drivers. From this point of view, people need some tools to realise their needs. The car’s construction is too complicated to understand all mechanisms and their functions in environmental protection. Still, fuel consumption and its direct impact on the environment are explained easily. As is the case with an internal combustion engine, the rational and ecological use of energy strongly depends on the driver’s behaviour [
6]. Elements of car construction, especially the information available on a dashboard, can stimulate it. The studies that focused on driver support in eco-driving presented in [
7] describe the assistance system that advises the most fuel-efficient accelerator pedal angle in real time. The authors concluded that the haptic force feedback via the accelerator pedal is the most effective interface. The proposal of a driver support system is the “driving coach”. It collects, fuses, and analyses diverse information, such as a digital map, weather, traffic situation, and vehicle information, to provide drivers with in-depth information regarding their previous trip along with personalised hints to improve their fuel-efficient driving in the future [
8]. The algorithm for determining routes that cause the least fuel consumption was described in [
9]. The core of this algorithm is a specific EEC (energy efficiency constant) map containing logic that can predict fuel consumption. The android application, which provides several innovative properties—advice according to upcoming events, a real-time evaluation of the driving behaviour, the analysis of past actions, and an interface with OBD2 connector—is described in [
10]. These measures increase drivers’ ability to implement eco-driving, significantly affecting fuel consumption. They may cause a reduction in fuel consumption even by up to 15% [
11]. Modern vehicles are equipped with the fuel-cut function. The fuel is not injected when the driver does not press the gas pedal of a vehicle with engine speeds higher than approximately 1500 rpm above the mid-vehicle speed range. Such a solution enables about 4% fuel savings [
12]. In currently produced passenger cars, eco-driving indicator lights are installed. The vehicle speed, engine speed, and throttle position influence the indicator light. Depending on the type of vehicle, the throttle responsiveness, transmission gear shifting, or electric systems are tuned to reduce fuel consumption. Generally, the light indicator turns on (usually green) when the engine operates close to its minimum specific fuel consumption, influenced by many factors. An interesting issue is the attempt to describe how information about the engine mode run influences the driver behaviour and fuel consumption. This paper is devoted to this issue.
2. GDI Engine Modes of Run and Their Impact on Fuel Consumption
A spark-ignition engine is the most widely used power unit in today’s passenger cars. It must be very dynamic with low emission of toxic compounds in exhaust gases and low CO
2 emissions, synonymous with low fuel consumption. Unfortunately, it is not possible to meet all these requirements simultaneously [
13]. High dynamics and power require a rich fuel–air mixture provided to the engine cylinder. Such a supply is not favourable neither for low emissions of toxic compounds nor low fuel consumption [
14]. It is also unsuitable for the effective operation of the catalytic converter.
On the other hand, the supply of the spark-ignition engine with a lean mixture promotes low fuel consumption and reduces the engine’s dynamics. To meet both requirements and, first of all, fulfil the stringent vehicle emissions rules, gasoline direct injection (GDI) systems for SI engines are developing [
15,
16]. The specific fuel consumption for low loads of SI engines can be reduced by the supply of the engine with very lean, stratified mixtures [
17]. A high level of excess air characterises the stratified mixture. One of the limits for the excess air ratio increase is caused by cycle-by-cycle variations (described by the coefficient of variation of the indicated mean effective pressure—COV
imep), sharply increasing for very lean mixtures [
18]. A flame initiated by an ignition spark in a stratified mixture is formed in the layers with a combustible composition and spreads to leaner areas. Due to the higher air excess in the total volume of the air–fuel mixture, a more significant proportion of the fuel is completely burnt. As a result, it is possible to raise the engine thermal efficiency [
19]. Stratified mixtures are formed by fuel injection to the combustion chamber just before ignition on the compression stroke [
20]. In this mode of the engine, for stable combustion, it is necessary to make an appropriate mixture around the ignition plug [
21]. The mechanisms of mixture creation and its combustion are complicated. In GDI engines, flash boiling of the spray occurs during throttling or low load operations [
22]. The presence of flash-boiling bubbles in the nozzle can improve the end-of-injection characteristics by eliminating large drops or ligaments [
23,
24]. The thermo-physical properties of the fuel, such as density, viscosity, saturation temperature, latent heat of vaporisation and surface tension, determine the atomisation and evaporation process [
25].
The direct injection of fuel into the combustion chamber also improves fuel economy because the intake air is cooled by fuel evaporation [
17]. Additionally, energy losses related to throttling the airflow are smaller. However, the maximum amount of fuel that can be burnt in a very lean, stratified mixture is limited by the full amount of air in the cylinder. Hence, the combustion of stratified mixtures can take place only at relatively low engine loads and limited engine speed up to 3600 rpm [
26]. In addition, the lean mixture combustion makes the three-way catalytic converter less effective in reducing NO
X content in the exhaust gas. This problem was solved by the application of a three-way catalyst (TWC) with lean NO
x trap (LNT) [
27], e.g., Pt–Ba/Al
2O
3 LNT [
28]. They can bind NO
X particles when there is a higher excess of oxygen in the exhaust gas and reduce them to non-toxic particles during oxygen deficiency. Then, periodic regeneration by removing accumulated NO
X is required. The regeneration process occurs when there is no free oxygen in the exhaust gas, i.e., when the engine is supplied with a stoichiometric or rich mixture. In practice, the engine supplied with a stratified mixture is temporarily supplied with a homogeneous stoichiometric mixture. The increase in the driving time while fuelling the engine with a stratified mixture extends the regeneration periods of the catalytic converter. The longer periods or higher regeneration frequency may offset the savings obtained when supplying the stratified mixture.
Particulate Matter (PM) emissions from gasoline direct injection (GDI) engines, particularly Particle Number (PN) emissions, demand a trade-off between the measures that best reduce PN (such as high inlet air temperatures, high exhaust temperatures, or low aromatic fuels) and those which give the efficiency gains. A fully vaporised fuel-air mixture will give low levels of PN emissions. Any fuel that remains in a liquid state at ignition, especially when a stratified mixture is created, burns as a diffusion flame, leading to high levels of PN emissions known as a pool fire [
28,
29]. In addition, the GDI engine produces higher PN emissions at high load or if there is fuel liquid impingement on the piston bowl and cylinder wall fuel liquid impingement on the piston bowl and cylinder wall [
30].
Various injection and airflow strategies have been implemented, such as multiple injections and spray-guided techniques, to achieve the proper mixture in the combustion chamber of a GDI engine. Major injector manufacturers began developing a piezo-outwardly type injector and a multi-hole type injector to improve engine performance and reduce exhaust emissions [
15,
21].
The less economical, homogeneous mixture in the GDI engine is created by fuel injection at the beginning of the intake stroke. The injected fuel mixes with the air and evaporates during the rest of the intake stroke and the compression stroke [
31]. Therefore, the type of the formed mixture is determined by the fuel injection phase.
In practice, the described process of mixture creation and the operation of the catalytic converter is strongly affected by driver behaviour.
Based on the analysis of HEV eco-driving possibility, the authors concluded that fuel economy is strongly affected by the drivers’ perception [
32].
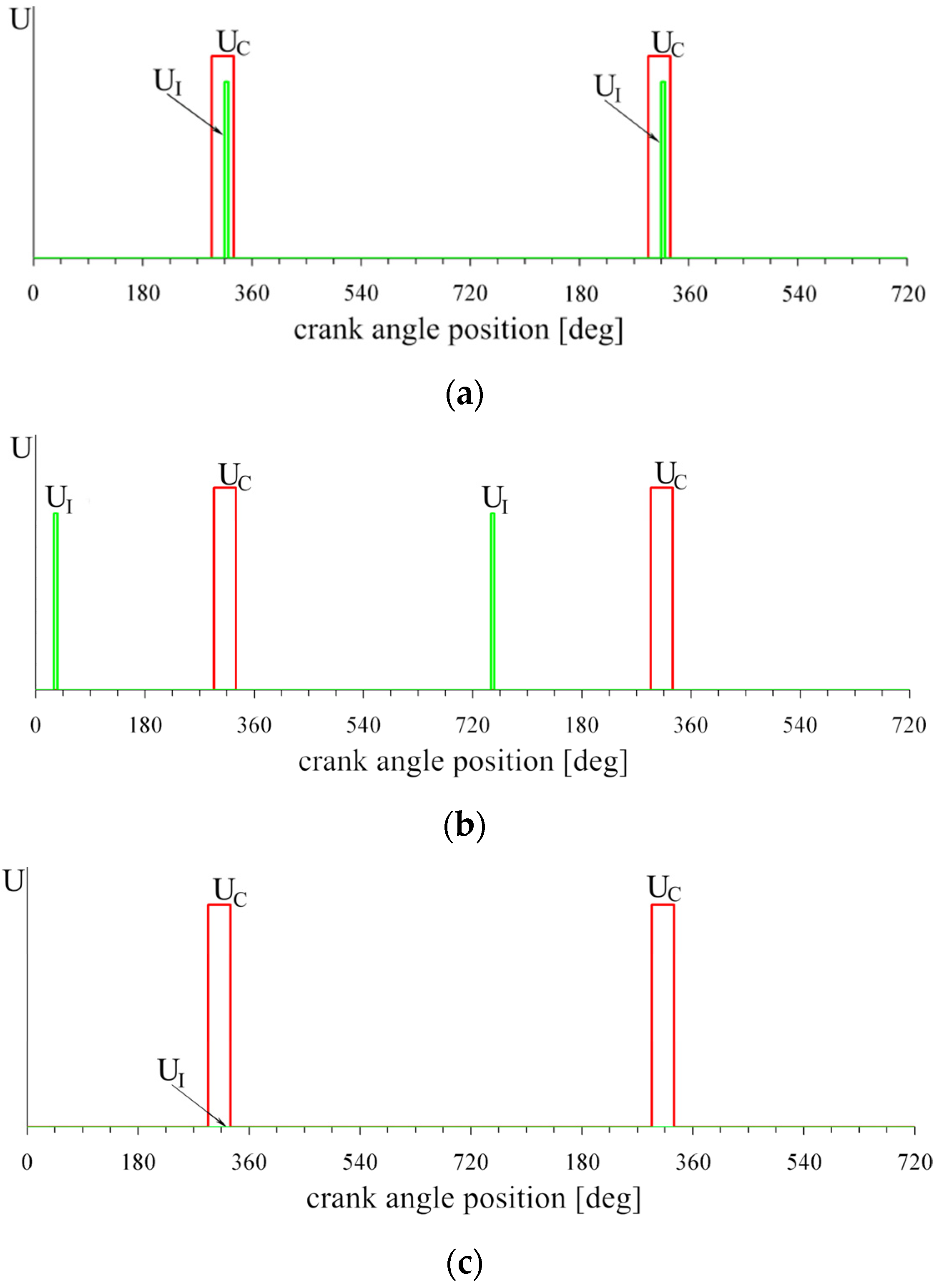
In the experiment, parameters of three possible injection modes were registered and analysed:
The late fuel injection in the stratified mode (fuel is injected late into the cylinder during the compression stroke enables lean mixture burning by keeping rich combustible mixture near spark plug during discharge time).
The early fuel injection in the homogeneous mode (fuel is injected in the suction stroke to form a homogeneous mixture due to sufficient time for the mixture preparation).
The fuel shut off during deceleration, such as coasting or braking when there is no torque requirement.
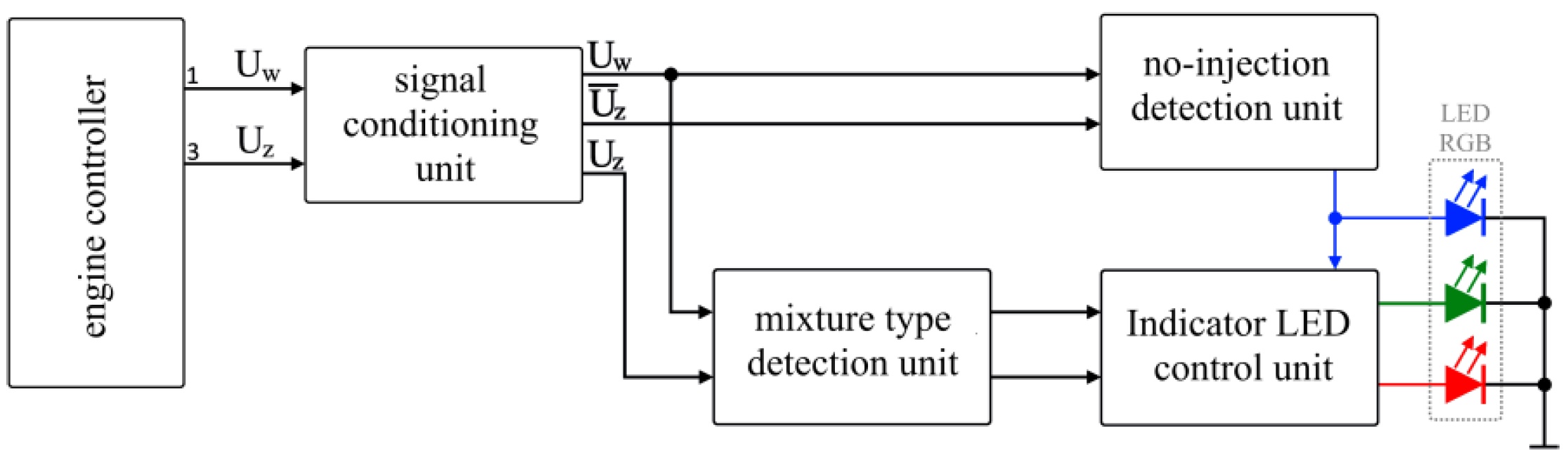
The GDI system consists of sensors that detect the engine conditions and the engine ECU, which controls the system based on these sensors’ signals and actuators. The engine ECU carries out fuel injection control, idle speed control and ignition timing control [
33]. The way the driver interacts with vehicle controls strongly influence the engine’s operation, especially the change of the fuel injection mode, and affects fuel consumption. It was the subject of the experiment described in
Section 4.
4. The Experiment
The experiment aimed to examine how the information provided by the indicator, which informs about the operational mode of GDI engine run mounted on the vehicle dashboard, affected by the driver behaviour, can significantly contribute to eco-driving.
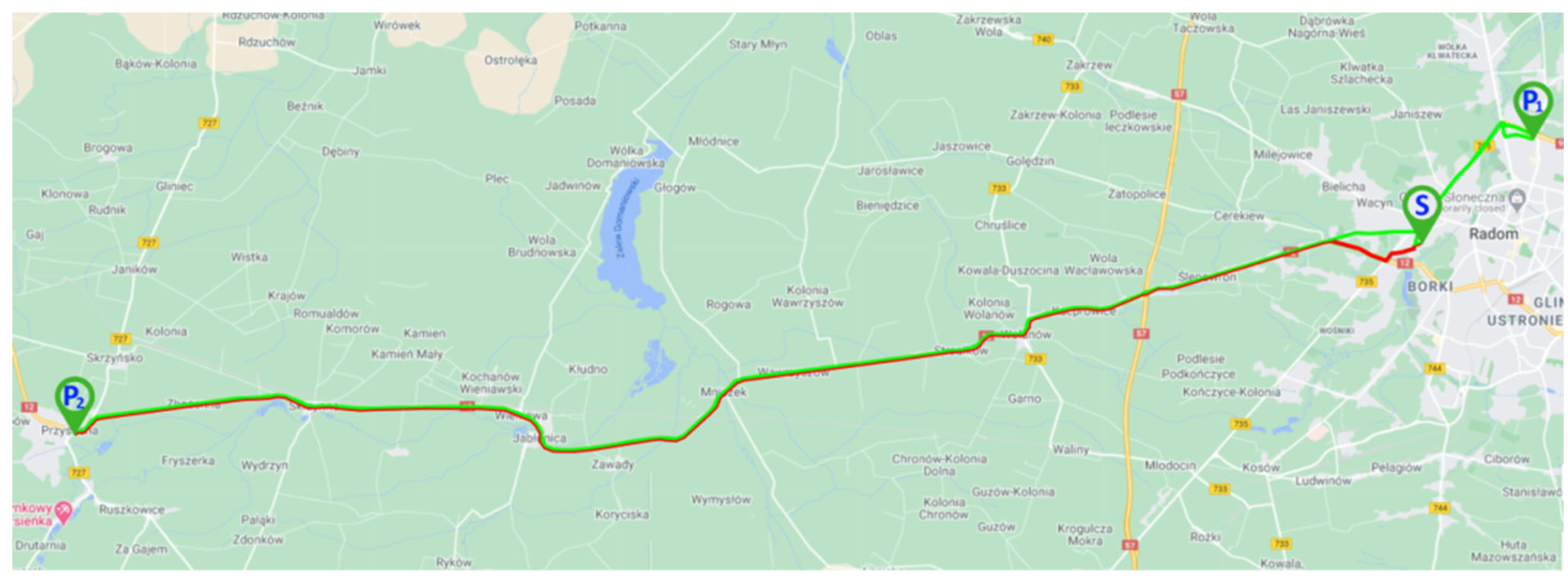
The experiment consisted of eight tests with and without access to the information from the indicator. The tests were carried out on the same road and at a distance of 82.5 km (
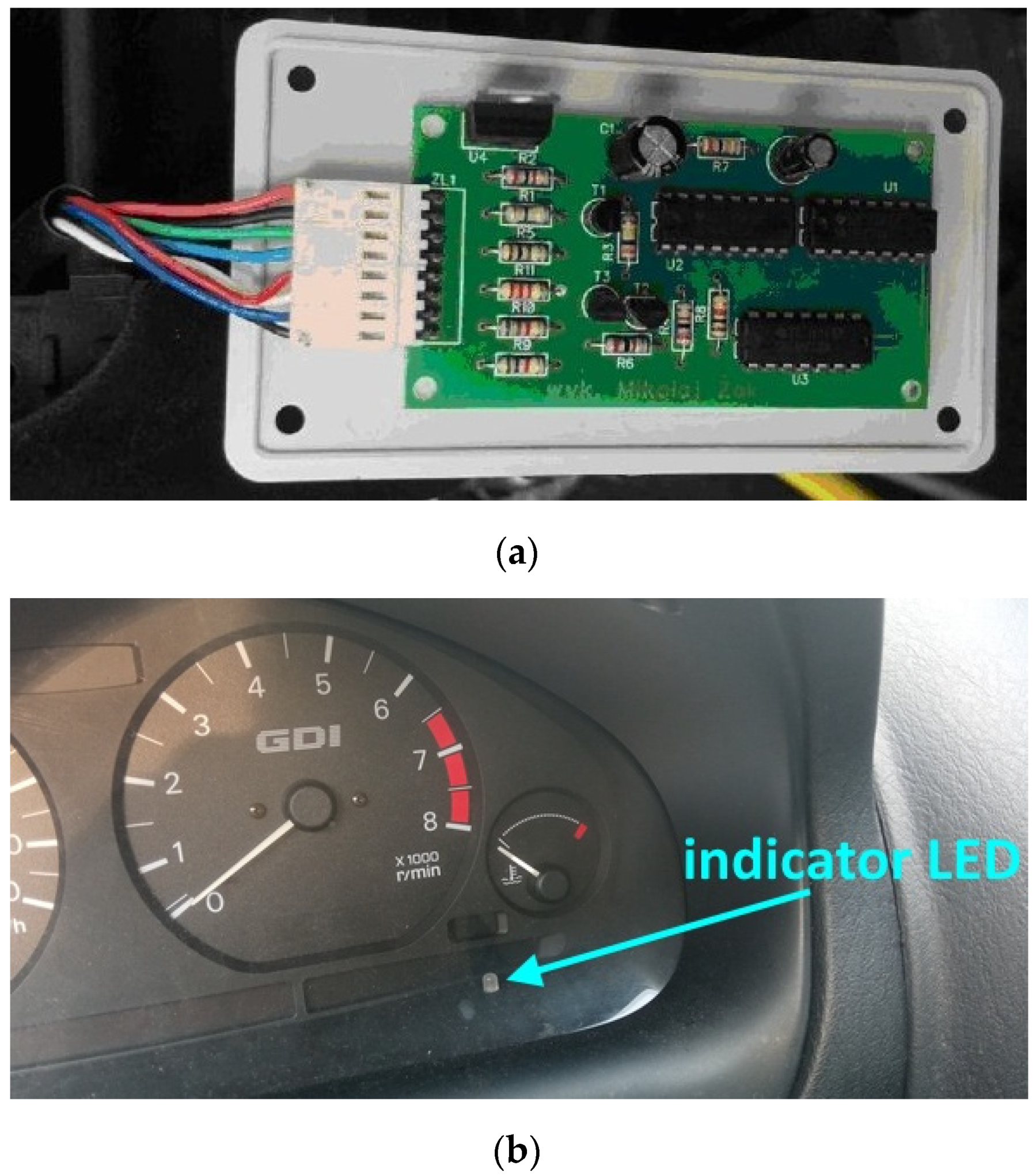
Figure 4). The distance was covered in two parts, travelled at the same time of each day. The amateur driver (woman), of good consciousness of the environmental threats with minimal technical knowledge, was engaged for the experiment. Only one driver tested the car to minimise the influence of drivers’ habits and ensure that a change in the driver’s behaviour was due to the response to information from the indicator. The driver was informed about phenomena connected with each operating mode of the GDI engine run and its ecological consequence. The investigation was carried out on a Mitsubishi Carisma with a GDI engine (
V = 1843 cm
3,
Ne = 90 kW at
n = 5500 rpm,
T = 174 Nm at
n = 3600 rpm, EURO3). The factory car dashboard provides no information about the economy of driving, which could influence the experiment. The car was equipped with an additional indicator of the operating engine mode. The indicator works by comparing the phase of the injection pulse phase with the ignition pulse for the same engine cylinder. It informs the driver using a three-colour LED, as described in
Section 2.
The driving test took place in conditions as close as possible to the daily routine use of the vehicle. The road and the times of the day in which the experiment was carried out resulted from the daily need to cover the distance by the driver and the passenger. In the morning, the passenger was taken to the exact same place (point P
1) and picked up from there in the afternoon. Thus, the test was carried out regularly in the morning (approximately 46.1 km—shown in green) and in the afternoon (about 36.4 km—shown in red). In the morning, the route led from the starting point (S on the map in
Figure 2) through the shortstop (P
1 on the map) to point P
2. The route from point P
2 to the stopping point (S—on the map) was covered in the afternoon. To confine the weather influence on fuel consumption, only those runs in similar conditions were selected, namely, dry road surface, similar air temperature, and no strong wind. A similar time of day for all tests ensured similar traffic congestion. The tyre pressure was kept at a constant level. The experiment consisted of 18 road tests and was divided into two parts. For the tests, nos. 1–9, the driver had no access to the information from the indicator (it was covered) but had access for the subsequent nine tests (tests no. 10–18). In both cases, the driver tried to drive at the optimum speed for the traffic conditions on the road. During the tests, the signal from the accelerator pedal was not recorded. The driver intuitively adjusted the method of pressing the pedal to make driving as economical as possible. Using the indicator (tests 10–18), the driver aimed at maximising the lighting time of the indicator LED in green. Although the accelerator pedal method affects the fuel consumption, in this case, the experiment was focused on the effects of the driver activity, which is complex and involves other activities, such as shifting gears and pressing the clutch and/or brake pedal. Thus, the measurements were limited to the parameters resulting from the driver’s actions. In particular, data allowing the analysis of the fuel injection system operation, with specific emphasis on the registration of the time of the engine run in each analysed mode, were collected. Although the signal from the accelerator pedal was not recorded, the driver’s remarks regarding the operation of the accelerator pedal to effectively change the engine operating mode are presented in
Section 5.
During each test, the following data were recorded every half second:
The indication of the type of a fuel–air mixture;
The signal from the vehicle speed sensor (as a sum of impulses);
The sum of the duration of the injector control pulses and their number, the signal from the engine crankshaft position sensors (engine speed).
The fuel consumption was calculated for each test by measuring the fuel used for every 82.5 km distance. It was acknowledged that using a different method of fuel measurement, which would require interference in the car’s fuel system, could pose a danger in road conditions, so the fuel consumed was measured after each test.
The data recorded from each test were divided into two parts: the vehicle’s movement and the vehicle’s stop with the engine running. The periods of vehicle stopping resulted from road traffic, including those forced by traffic lights, and a shortstop in the parking lot (point P
1 in
Figure 4) intended for a passenger change. The periods varied a little bit in each test, affecting the measurement of direct fuel consumption after each test. During the stop, the driver did not influence the engine operation. Therefore, the periods of shortstops were eliminated from the analysis of injector operation. The percentage timeshare of supplying the engine with particular types of the mixture or with the air only (engine braking) described below was determined from periods in which the vehicle was in motion.
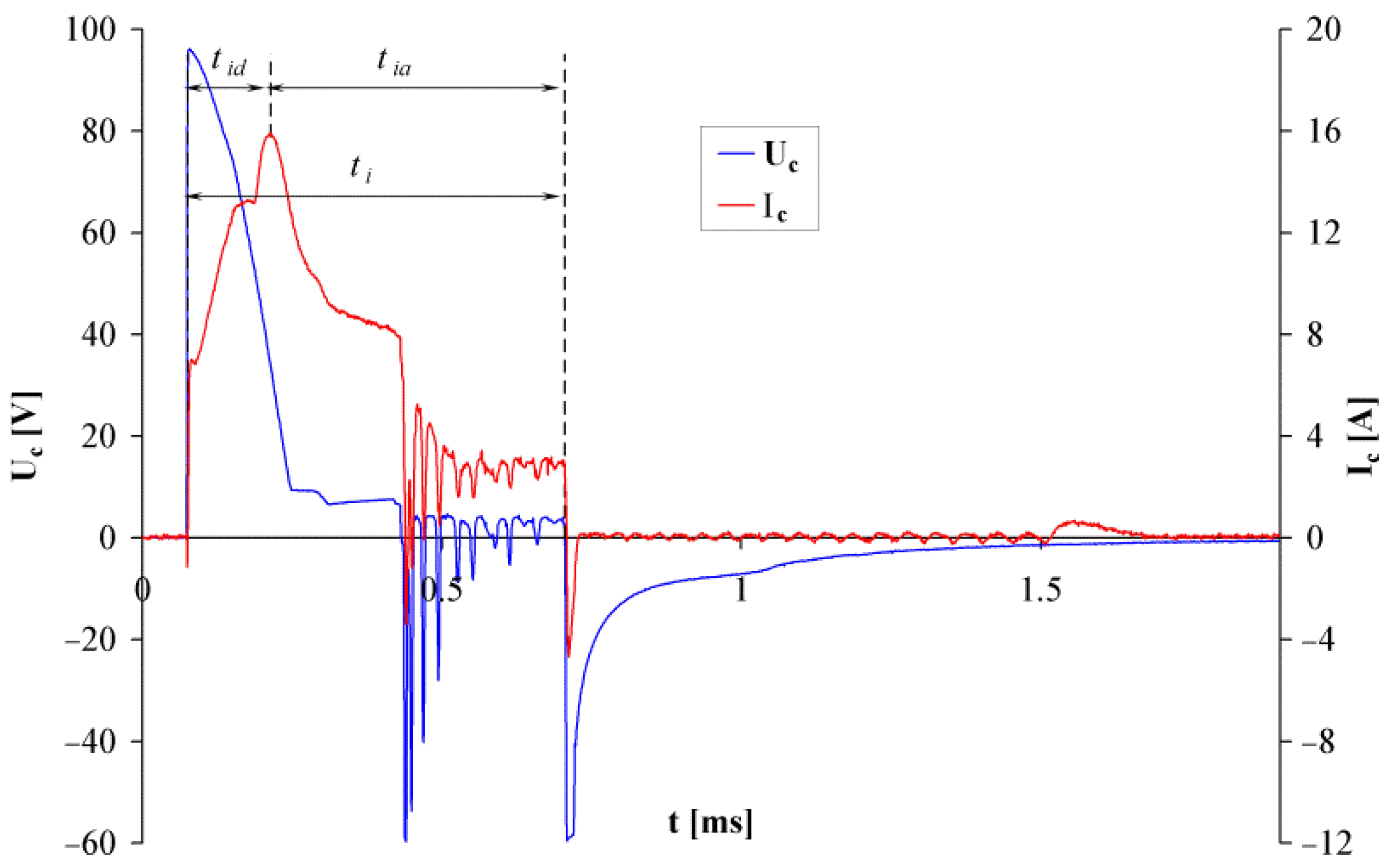
The injection time as the duration of the injection pulse, i.e., the applied voltage to the injector coil, consists of two parts: injection dead time (
tid) and active injection time (
tia) (
Figure 5). Injection dead time is when the current in the injector coil builds up until it reaches the value that allows the injector valve to open. It was assumed that after opening the injector valve, fuel is injected with a mass proportional to the active injection time (
tia), so the fuel consumption is proportional to it [
34].
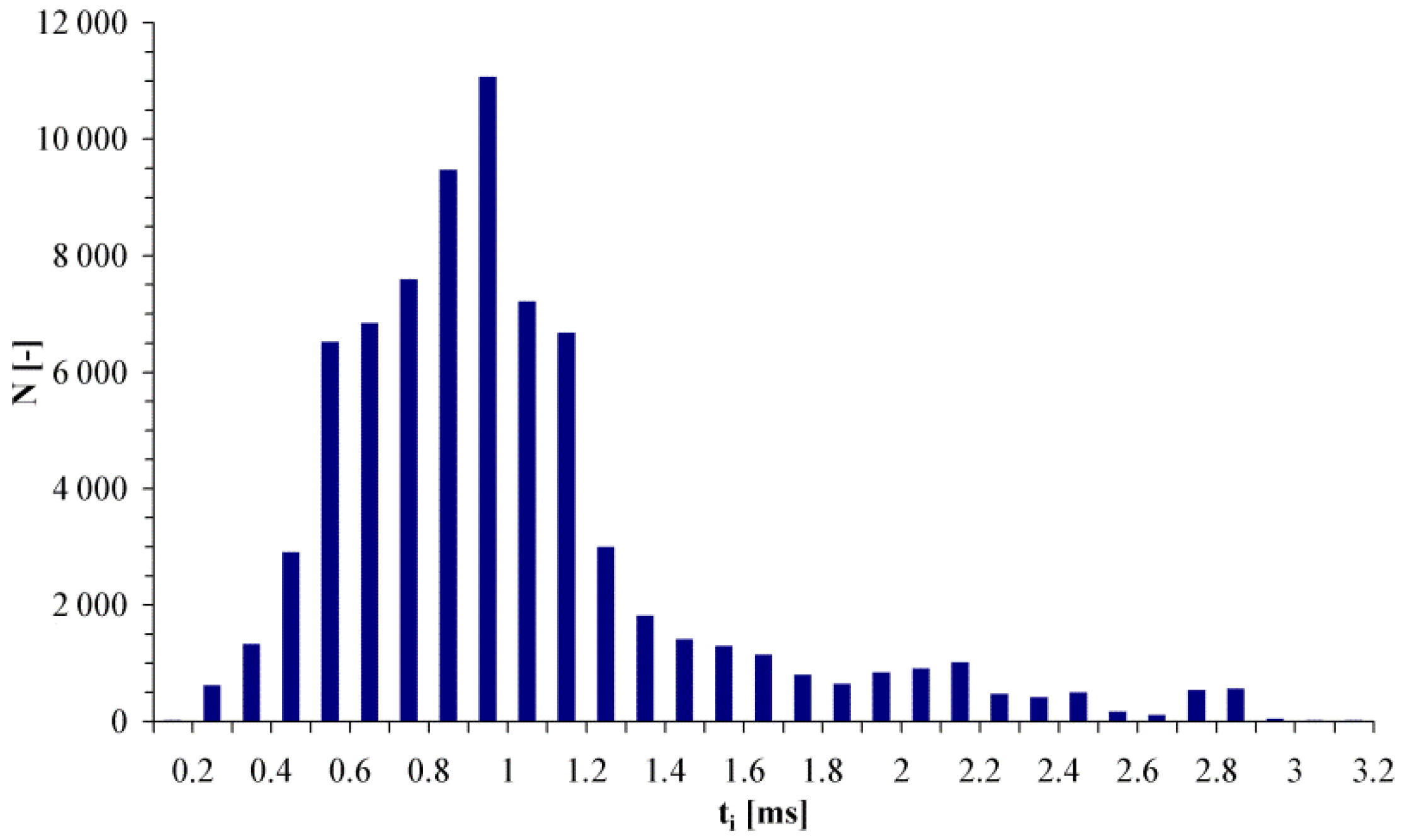
The analysis of the duration of injections was conducted (
Figure 6). The laboratory test showed that the minimum time of the injection pulse is always bigger than the dead time (
tid). The engine controller only generates pulses that ensure a non-zero fuel injection dose, and the pulses generated by the controller are proportional to the active injection time (
tia).
For each test, the sum of the duration of all injections (Σ
ti) in the periods of vehicle motion was calculated, and then the number of injections (
i) was determined. The average time of a single injection (
ti,av) was calculated as
The value of (
ti,av) was reduced by the injector dead time (which is nearly constant), and the average active time of a single injection (
tia,av) was obtained:
The value received was then multiplied by the number of injections during the test, and the sum of the average active injector opening time for each test was calculated:
The value of (Σ
tia,av) is proportional to the mass of fuel injected into the engine cylinder. The last transformation is the designation of the sum of average active injector opening time for one kilometre of the test route (
tia,av,k) on distance
D:
The parameter was used to describe the effect of acceleration pedal operation on fuel consumption for each test.
5. The Results and Discussion
Thanks to the use of registration of signals from the vehicle speed sensor, the time of car motion (
tm), the covered distance (
D), and the average speed (
va) of each run can be calculated. Almost the same distance of 82.5 km +/− 0.1% was recorded for each of the 18 road tests. The car’s average speed (
va) varied slightly at around 60 km/h, excluding test nos. 1, 2, and 6. The registration and acquisition of the injector signals enabled the calculation of the sum of average active injection time per one kilometre (Σ
tia,av,k), which is proportional to fuel consumption. The results are presented in
Table 1.
Table 2 contains the output from the Excel
t-Test two-sample, assuming unequal variances tool. For the significance level α = 0.05, the hypothesis of the mean value difference for two series of the sum of average active injection time per one kilometre ΔΣ
tia,av,k = 50 [ms/km] was verified. The hypothesis was accepted.
The average speed of the car for each test and the sum of average active injection times per one kilometre (Σ
tia,av,k) are presented in the diagram (
Figure 7).
Figure 7 shows an apparent lack of dependence between the average vehicle speed and the sum of average active injection time per one kilometre (Σ
tia,av,k); the correlation coefficient is 0.26. This can be explained by minor differences in the average car speed in each test, which did not affect the rolling resistance and energy use for acceleration. It was essential to analyse the driver’s behaviour, especially her activity connected with the pressing of the acceleration pedal.
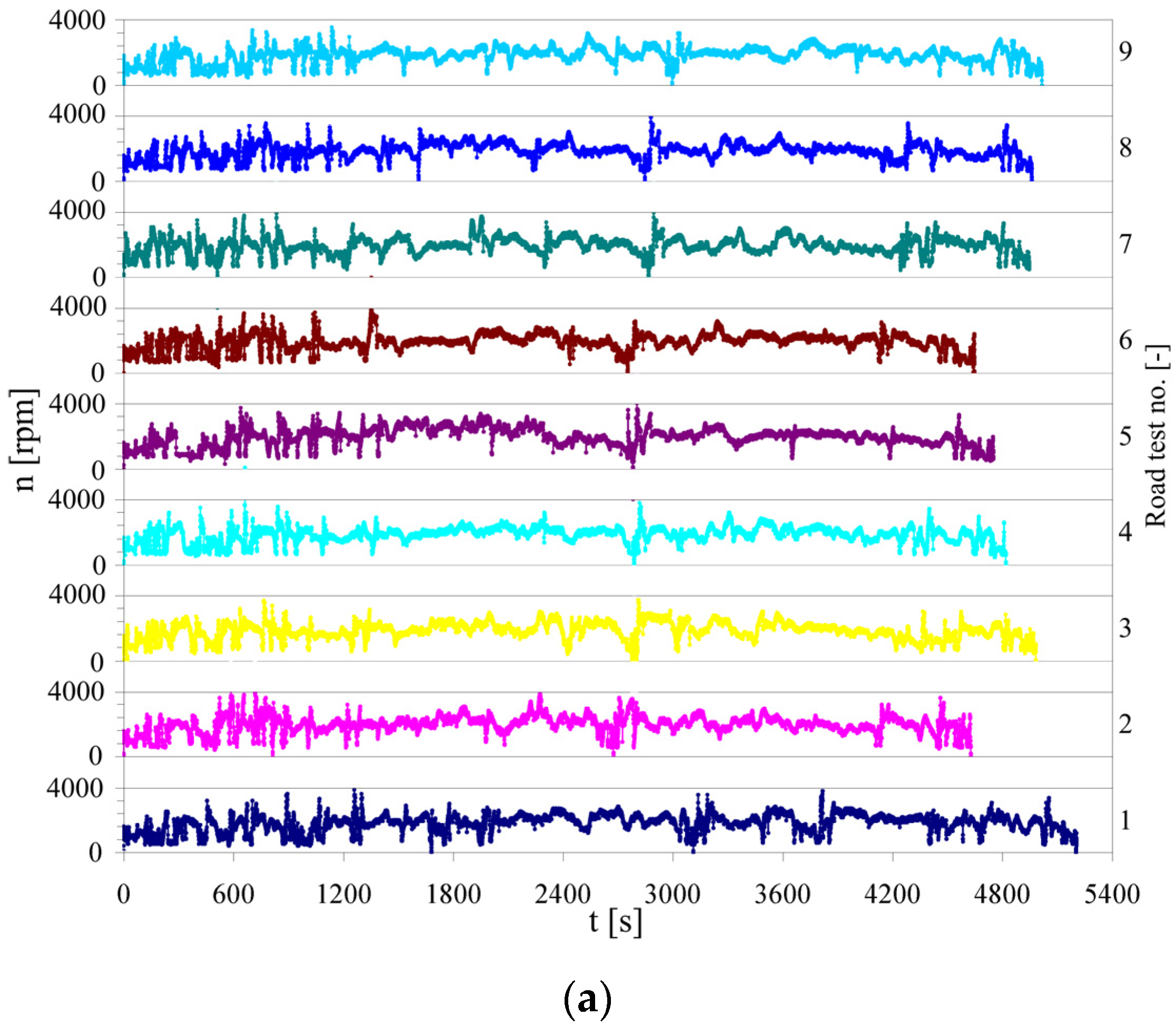
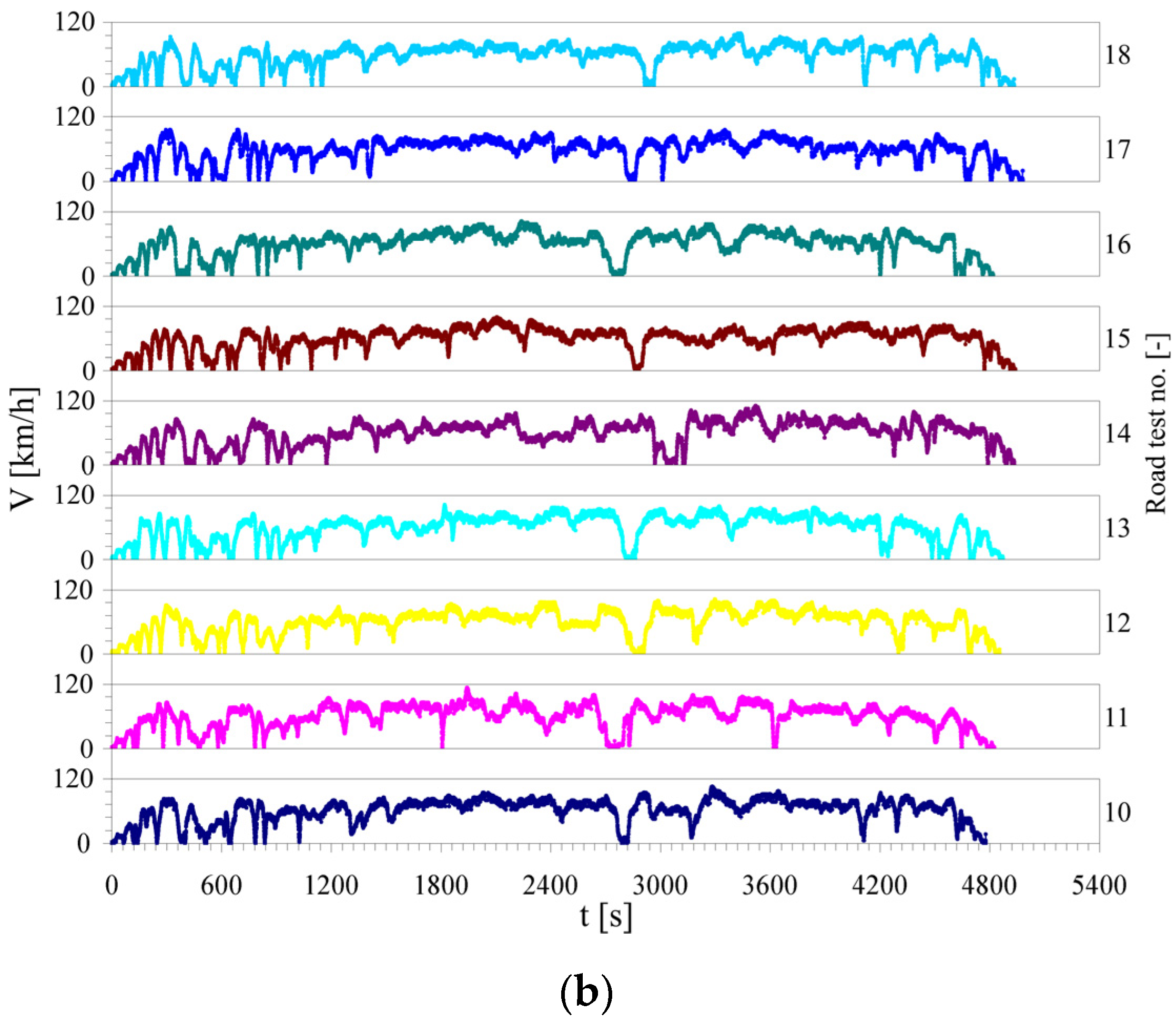
The direct effect resulting from the driver’s activity related to pressing the acceleration pedal is the engine speed (
n). Diagrams of the engine speed registered for each test are shown in
Figure 8. Diagrams of the vehicle speed for each test are shown in
Figure 9.
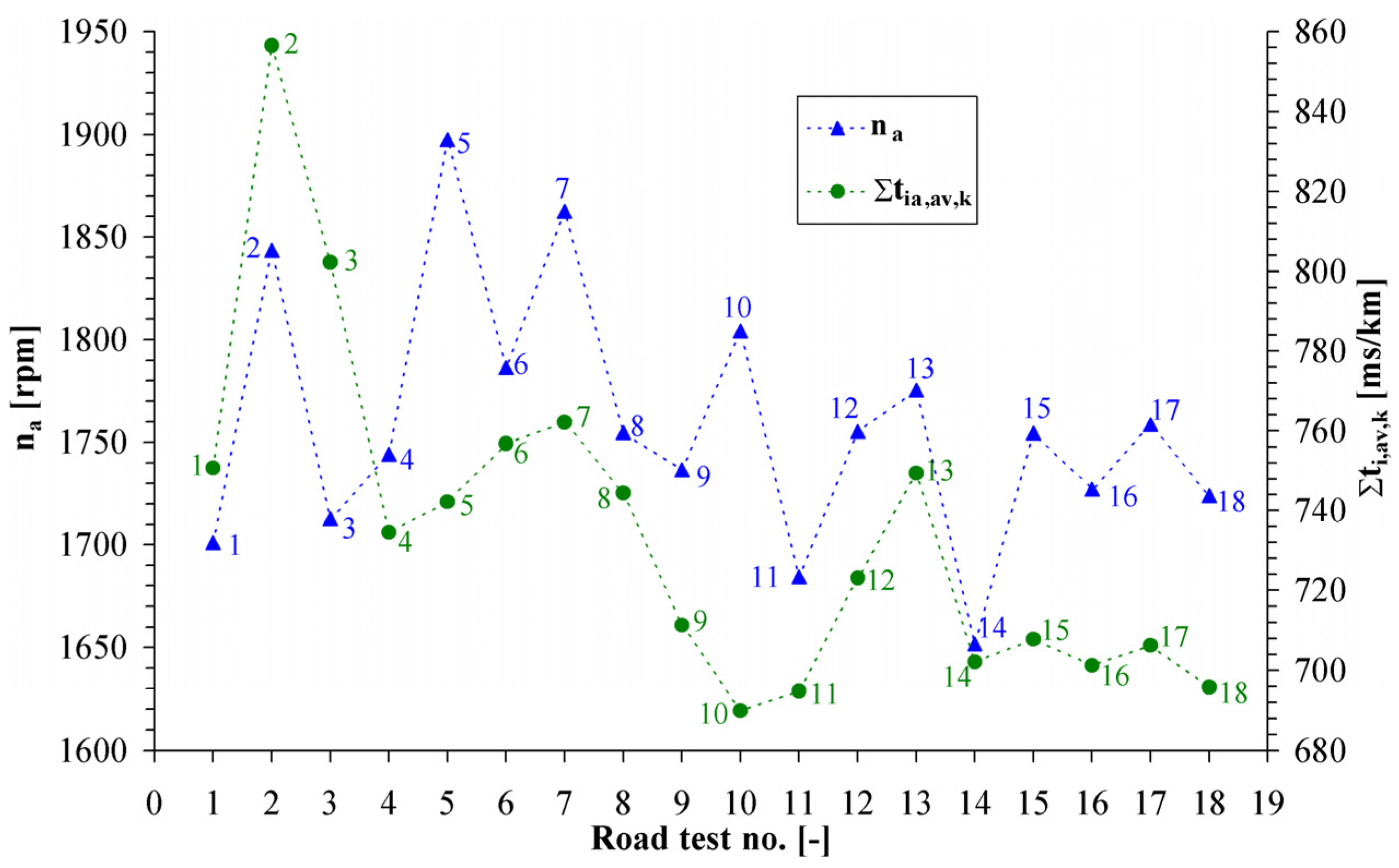
The average engine speed for each test and the sum of average active injection time per one kilometre (Σ
tia,av,k) for all tests are presented in
Figure 10. The average vehicle speed for each test and the sum of average active injection time per one kilometre (Σ
tia,av,k) for all tests are presented in
Figure 11.
There is no correlation between the average vehicle speed and the average fuel injection time on the test route per kilometre (
∑tia,av,k). The lack of correlation between time and vehicle speed is partly influenced by the gear selection (the vehicle is equipped with a manual gearbox) and vehicle braking. On the other hand, the dependence of the engine speed and fuel injection time on the test route per kilometre (
∑tia,av,k) presented in
Figure 10 shows similarity, especially for the drives with the indicator (tests 10–18). The exception here is test no. 10, where the decrease in
∑tia,av,k is accompanied by an increase in rotational speed.
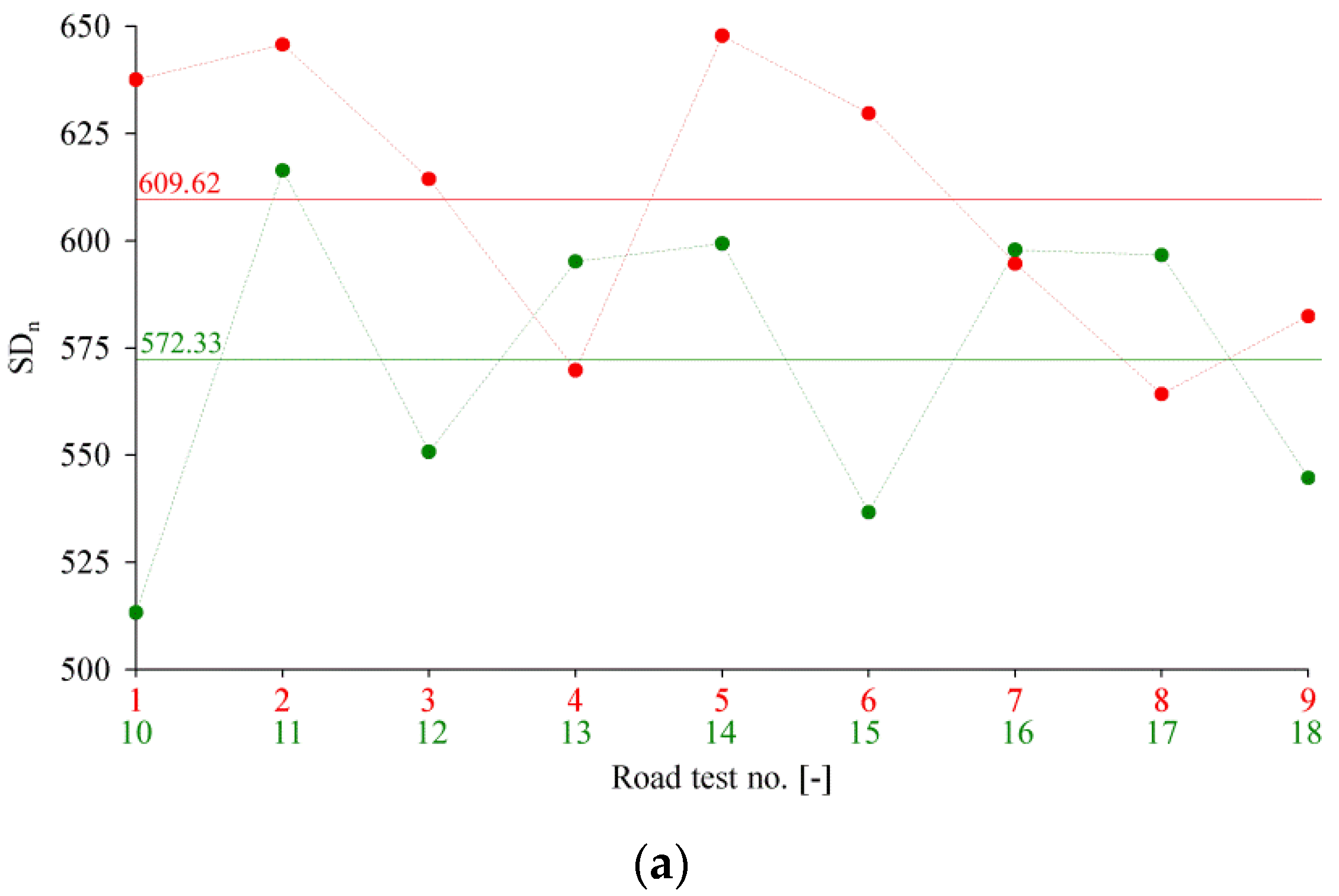
The analysis of the standard deviation of the engine speed (
Figure 12a) and the vehicle speed (
Figure 12b) shows that when the driver uses the indicator, both for the engine speed and the vehicle speed, the standard deviation values are lower. The average value of the standard deviation of the engine speed calculated for the tests 10–18 (with the use of the indicator) is lower than that calculated for tests 1–9 (without the use of the indicator) by 6.12%. The average value of the standard deviation of the vehicle speed for tests 10–18 is lower than that calculated for tests 1–9 by 4.78%. So, the use of the indicator contributed to a certain limitation of changes in the engine speed and driving speed. The phenomenon is evident for tests 12–18, when the driver is accustomed to the indicator use.
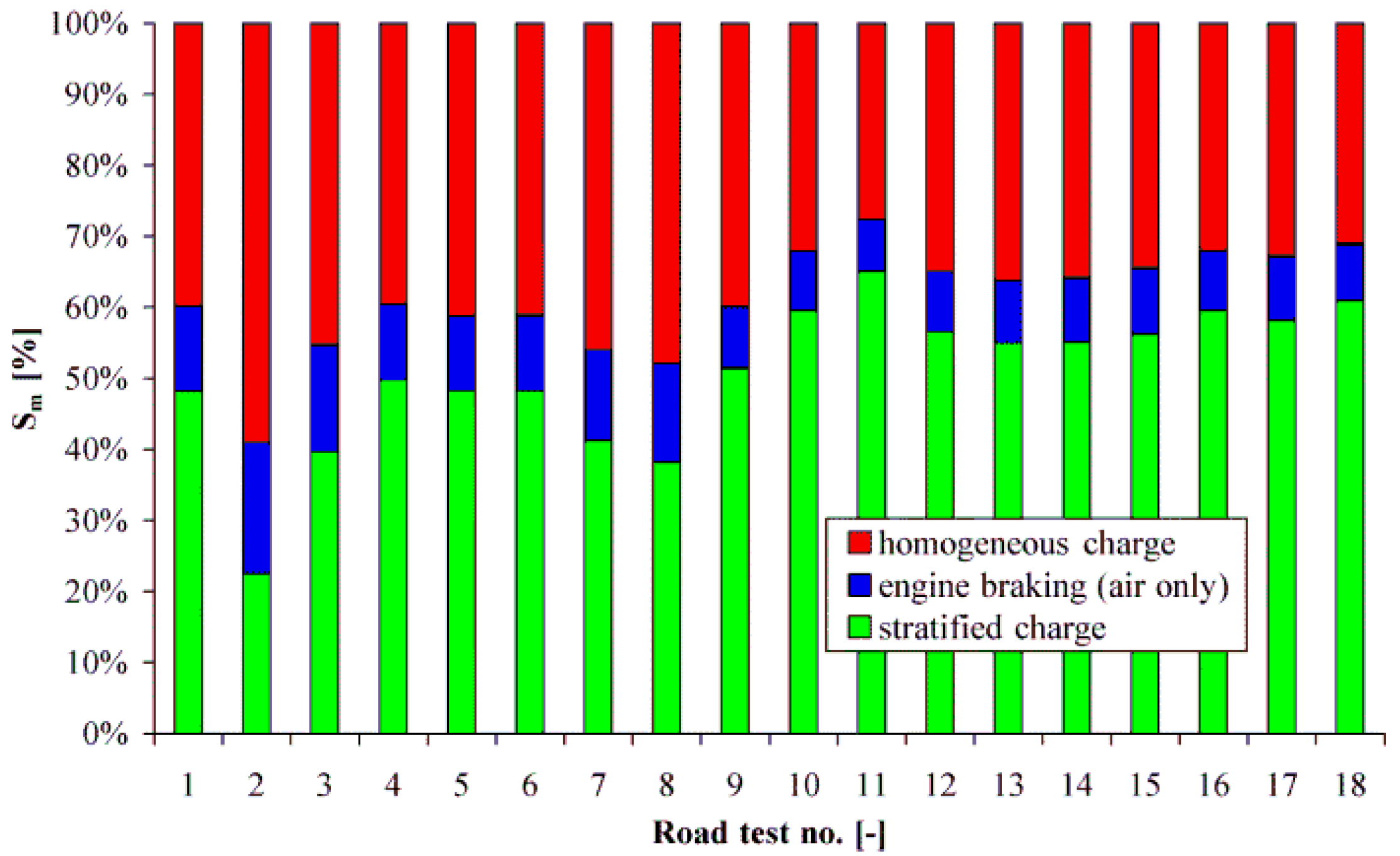
The percentage shares of the three modes of the engine run for all tests carried out in the experiment are compiled and presented in
Figure 13.
The most important result of the experiment is demonstrating the relationship between the sum of average active injection time per one kilometre (Σ
tia,av,k) and the share of the time of operation using each mode of the engine run. This dependence is presented in
Figure 14. The green dots represent the sum of average active injection time per one kilometre (Σ
tia,av,k) for the percentage share of the engine being supplied with a different type of mixture (stratified mixture, air only, and homogeneous mixture).
The dark green points (
Figure 14) show the dependence of Σ
tia,av,k on the sum of the percentage share of supplying the engine with a stratified mixture and no injection time (both modes contribute to fuel savings). The more extended periods of driving with the shut-off fuel injection positively affected the fuel economy. The opposite effect can be observed for the percentage share of driving using a homogeneous mixture. The sum of the average active injection times per one kilometre (Σ
tia,av,k) increases with the percentage share of homogeneous mixture mode of engine run. It is represented by red points approximated by the same colour line (
Figure 14). The presented relationships are confirmed using the correlation coefficient calculated for them, at least 0.92. The answer to whether the driver’s information about the mode of engine run results in a more economical driving style is given by results shown in
Figure 7 and
Figure 13. In the case of test nos 10–18 (the driver had access to the information about the mode of engine run), the highest share of driving time with the stratified mixture use and the sum of the driving time with the stratified mixture use with no injection was observed.
During the first nine tests, in which the indicator was covered, the lower timeshare of the economic fuelling of the engine was noticed. Only test no. 4 gave a similar percentage of the economic mode of the engine run as for tests with the use of the indicator.
The average share of fuelling the engine with a stratified mixture with the covered indicator was 43.1%, while when the indicator was visible to the driver, it was 58.5% (
Figure 13). Thus, the share of fuelling the engine with the stratified mixture increased due to the information from the indicator, and it raised by over 15% on average. For these two parts of the experiment (nine tests driving without and the nine with the information from the indicator), the difference in average fuel consumption measured directly for both parts was 10.4% in favour of the part of driving with the indicator information available.
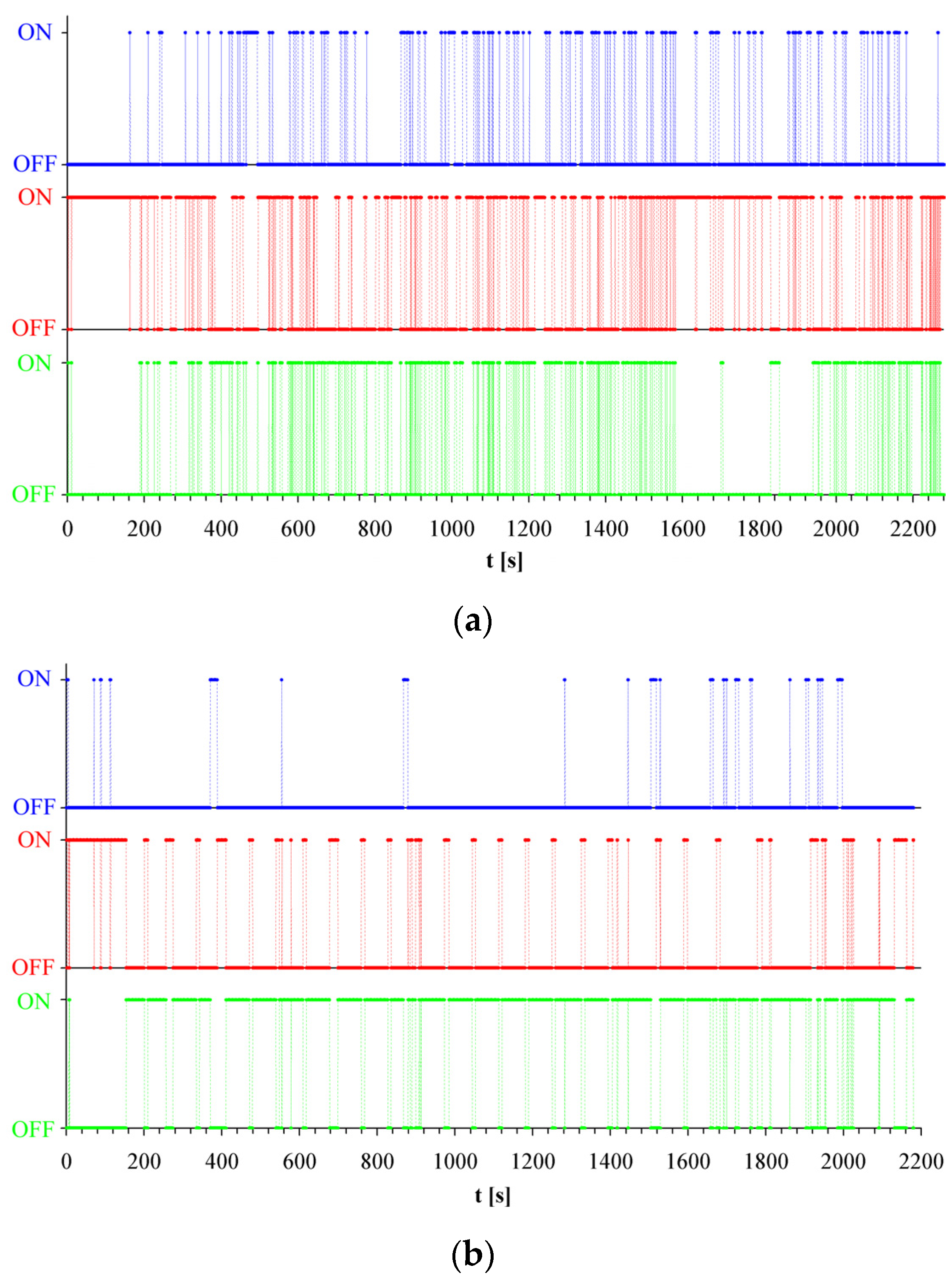
The registered data from the indicator (
Figure 15a) show how the driver, without the information about the type of mixture, tried to find an economical way of acceleration pedal operation (
Figure 15b). Unfortunately, these trials did not bring good results. Lack of information about the mode of engine run caused the driver to use the accelerator pedal constantly to regulate the driving speed. It resulted in a persistent change in the engine run mode, so the green and the red signals appeared alternately. In such driving, a momentary injector shut-off occurs much more often. The constant change of the type of mixture gave a more significant share of supplying the engine with a homogeneous, less economic mixture. For 33.7% of the route presented in
Figure 8, the driving used a stratified mixture. For as much as 52.4% of the route, the driving used the homogeneous mixture, and 13.9% during engine braking (the air only).
Figure 15b shows the opposite situation. A driver who has information about the mode of engine run can easily drive a huge part of the route while supplying the engine with a stratified mixture (more economical one). The data presented in
Figure 15b (test no. 11) show that the driver completed the distance in 73.4% of engine fuelling with a stratified mixture and 21.8% with a homogeneous mixture. The remaining 4.7% of the driving time was covered with engine braking.
The information from the indicator enabled operating the accelerator pedal so that the engine was supplied with the stratified mixture in a controlled way. In practice, this requires quick acceleration to the target speed and then setting the accelerator pedal to a position where the indicator confirms that the engine was supplied with a stratified mixture, and it is possible to maintain the correct car speed.
Slowly reaching the target car speed takes a long time and, in some cases, does not change the mixture from homogeneous to stratified. The lack of information from the indicator might cause the driver to cover a significant part of the distance using a homogeneous mixture—a less economical one. Keeping the acceleration pedal in a stable position is an essential factor that influences fuelling with the stratified mixture.
The results showed that the mode of engine run strongly depends on the driver behaviour. The exception is the warming up of the engine and the short periods of catalytic converter regeneration. The supply of the engine with a homogeneous mixture (high signal level in red in
Figure 15a) was visible for approximately 150 s at the beginning of the engine run, and then for many short periods, when there was a regeneration of the catalytic converter and when the traffic situation forced it. The injector shut-off (high level of the blue signal in
Figure 15a) occurred only in a few cases of engine braking resulting from the road situation and the change in engine speed when changing gears.
The increase in the share of engine running time in a stratified mode contributes to reducing fuel consumption. Many non-engine-related factors affect fuel consumption while driving. One of them is the selection of gear ratios in the gearbox and factors related to the movement of the vehicle and weather conditions, e.g., air resistance, which is influenced by the direction and strength of the wind. However, the reduction in fuel consumption while driving with the use of the indicator is significant. It confirms the need for its application, especially when the driver knows the signal’s meaning.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}