1. Introduction
Plants play a vital role in the life of human beings and animals. They are major sources of food, medicine, shelter, etc. Plant phenotyping is becoming essential with the increase in food demand globally. It deals with the quantitative measurement of the structural and functional properties of plants—that is, the process of determining plant traits such as chlorophyll content, water content, leaf surface area, and leaf count, and disease identification. The conventional methods involve the manual measurement of the key plant traits. These methods depend on the knowledge of plant breeding experts and farmers. The drawbacks of the conventional methods are that they are expensive, inaccurate, and time-consuming, and many of them are destructive in nature. To overcome these difficulties and limitations, modern researchers are using computer vision techniques [
1] and deep learning models in plant phenotyping.
Recently, global agriculture and modern research programs have faced difficulties in plant breeding [
2]. Many plant phenotyping communities have been developed in different countries and are involved in solving problems in plant phenotyping. Many researchers have worked on various plant phenotyping methods to identify plant traits from plant images. Wu and Nevatia [
3] developed an occluded object segmentation method for plant phenotyping. Praveen Kumar and Domnic [
4,
5] developed various plant segmentation and leaf counting models for plant phenotyping. Dellen et al. [
6] identified the growth signatures of rosette plants from time-lapse video. Grand-Brochier et al. [
7] studied various methods to extract the tree leaves from natural plant images. Reeve Legendre et al. [
8] developed a low-Cost chlorophyll fluorescence imaging to detect the stress in Catharanthus roseus plants. Raghav Khanna et al. [
9] developed a spatio-temporal spectral framework for plant stress phenotyping. Martínez-Ferri et al. [
10] conducted a study in an environmental condition where only white root rot disease stress was applied to avocado roots and the other conditions favored plant growth. This study was conducted to provide information on physiological change that occurs during the initial stages of R. necatrix infection on avocado roots. It showed the effect of root rot disease on leaf chlorophyll content.
Biotic and abiotic plant stresses act as important factors for crop yield. In order to protect the plants from these stresses and to prevent a reduction in crop yield, plant breeders depend on plant phenotyping methods and genetic tools to accurately identify plant traits.
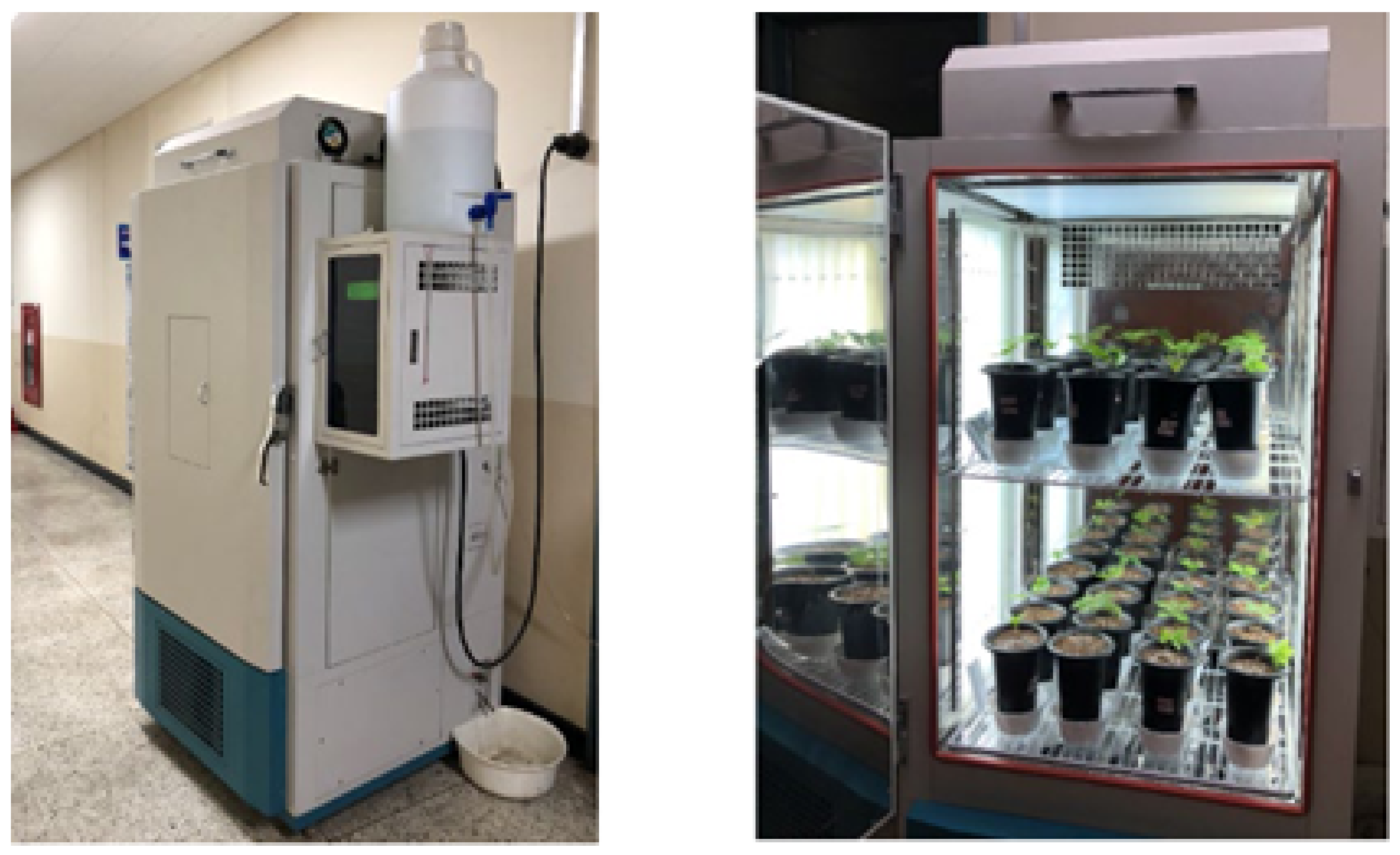
Korean ginseng (Panax ginseng Meyer) is a famous herbal plant that is sensitive to biotic stress. It is a shade-loving plant and useful for strengthening human immunity. It is highly sensitive to heat stress [
11,
12]. The roots of Korean ginseng have high pharmacological efficacy [
13]. The size, appearance, and shape of the roots determine the quality and value of the roots. Generally, Ginseng plants are cultivated for several years, and the roots of the plants are harvested for sale between the fourth and sixth years. Ginseng roots are at risk of soil-borne diseases caused by nematodes, fungi, and bacteria in these long cultivation periods [
14]. Among these fungi are the most common pathogens causing various diseases such as anthracnose, alternaria blight, root rot, gray mold, botrytis blight, etc. [
15,
16].
The fungus Cylindrocarpon destructans is one of the most harmful pathogens, causing root rot and rusty root disease. Root rot disease can significantly reduce ginseng production [
17,
18,
19,
20]. Cylindrocarpon destructans also gives rise to thick-walled resting spores known as chlamydospores that can survive for more than 10 years in the soil. This can lead to the development of root rot disease at any point of time while the spores remain in the soil [
21].
The root rot disease in grapevine plants cause symptoms in aboveground plant region [
22,
23,
24]. These include stunted shoots, wilting leaves, low fruit production and dwarf leaves. Sometimes, the plants do not show any symptoms of disease (asymptomatic) in the aboveground plant region [
23,
25]. The roots cannot support the aboveground plant regions and they start to die. Hence, there will be less photosyntetic activities in the plants and the plant slowly starts to die. A study [
26] on symptomatic and asymptomatic effects of this disease has been conducted in 15 plant species.
There are many existing methods [
27,
28] to identify the presence of Cylindrocarpon destructans, but these methods are destructive in nature. The root rot disease has been identified from the plant leaves using hyperspectral leaf images and machine learning techniques [
25]. The root images are analyzed using feature extraction methods [
29] and deep learning techniques [
30] to find the root rot disease in Lentil. In order to obtain the root images, the plants are removed from the pots and the root images are captured.
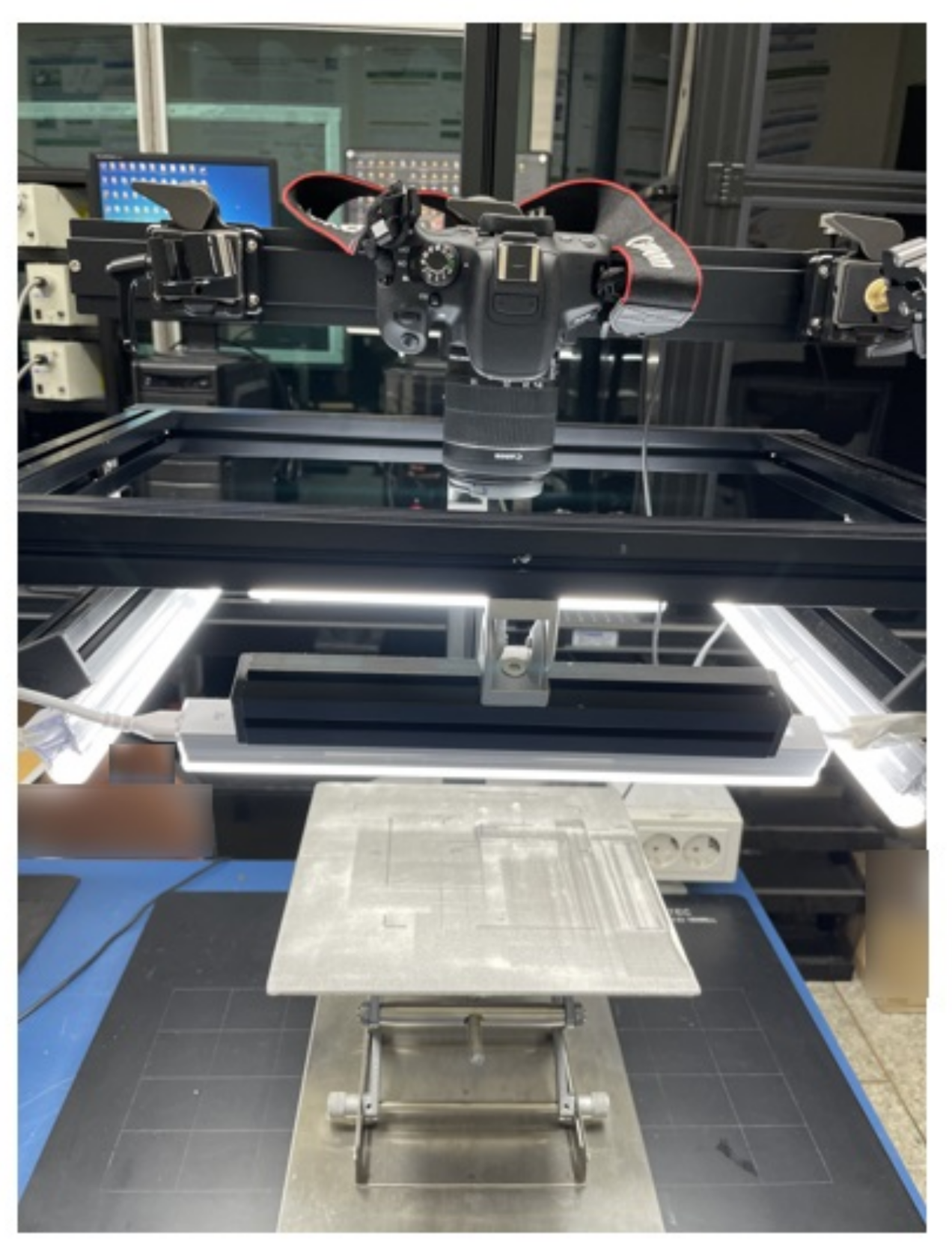
Hence, non-destructive identification of root rot disease is necessary to prevent a reduction in crop yield. In order to develop a low-cost, high-throughput, non-destructive, image-based analysis model, RGB images can be used. It is easy to collect numerous RGB images at a low cost and in a short time. Furthermore, various analyses are possible with these numerous data. The visible information from the collected RGB images helps in identifying the state and morphological changes in the plants through RGB-image-based plant phenotyping.
Nowadays, deep learning models are widely used to solve various complex real-time problems. Furthermore, their usage is increasing in solving agriculture-related problems. Among them are deep-learning-based plant phenotyping methods. The deep learning models can be applied to the collected data to perform various analyses.
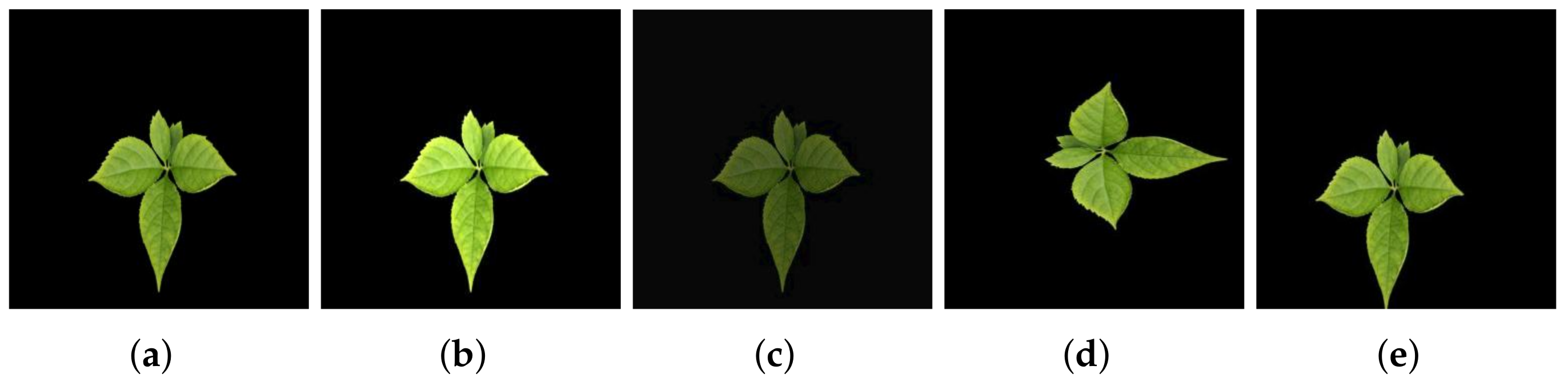
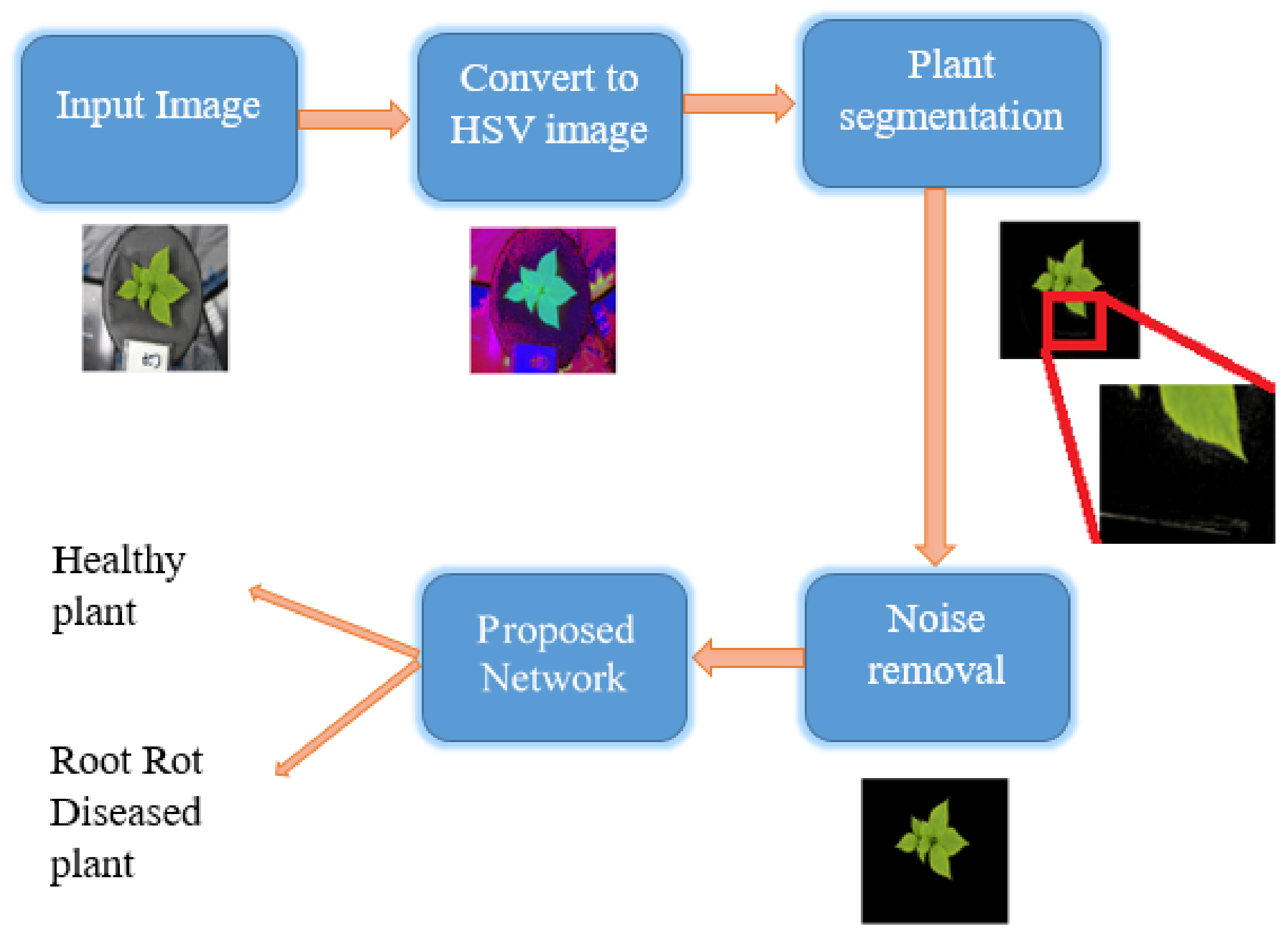
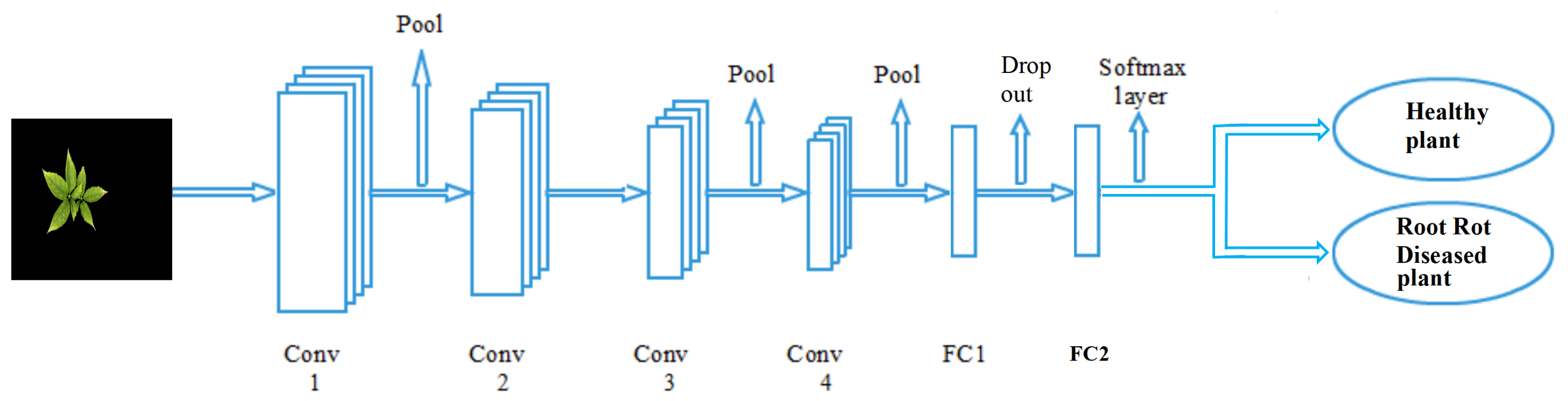
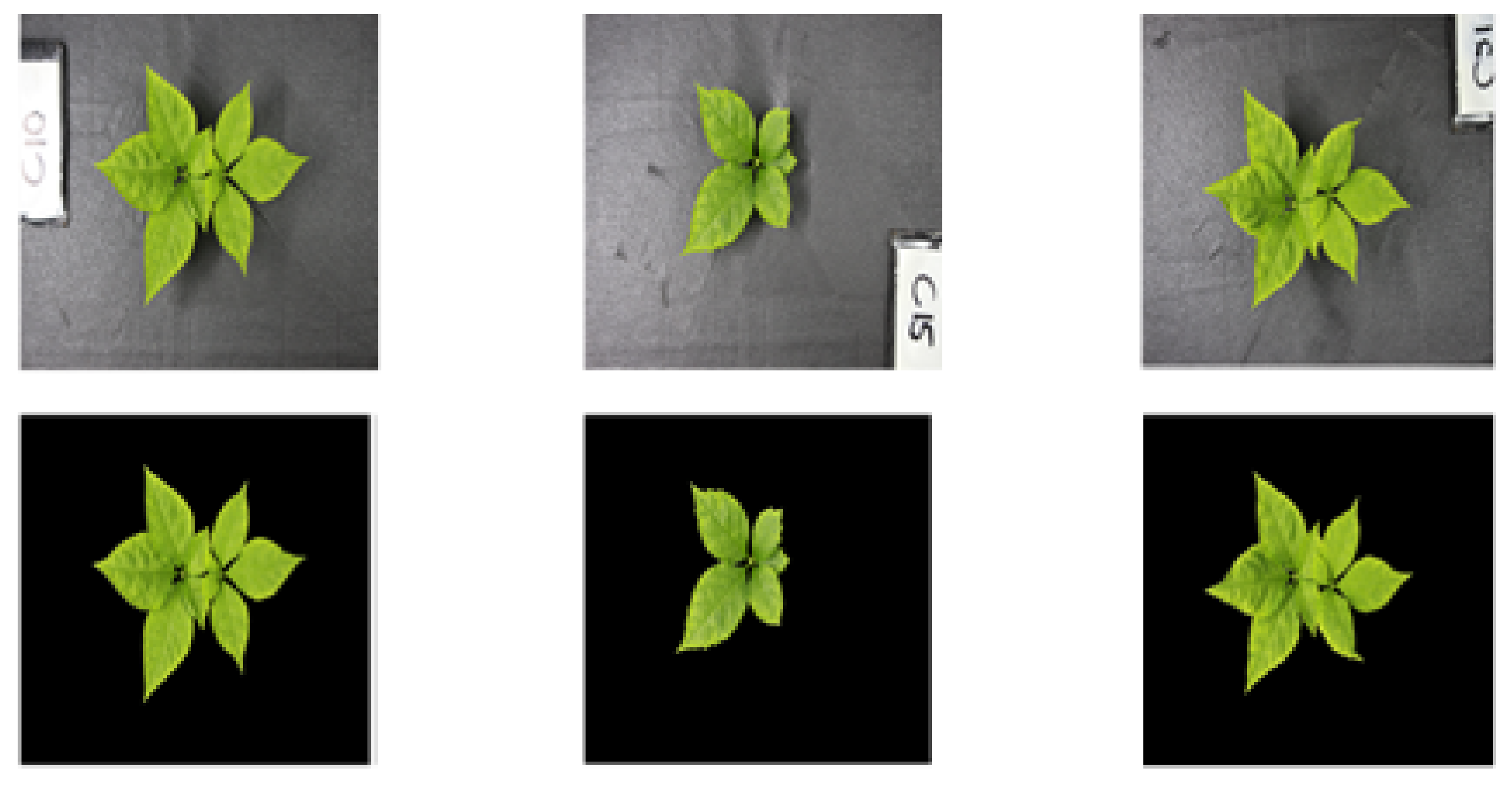
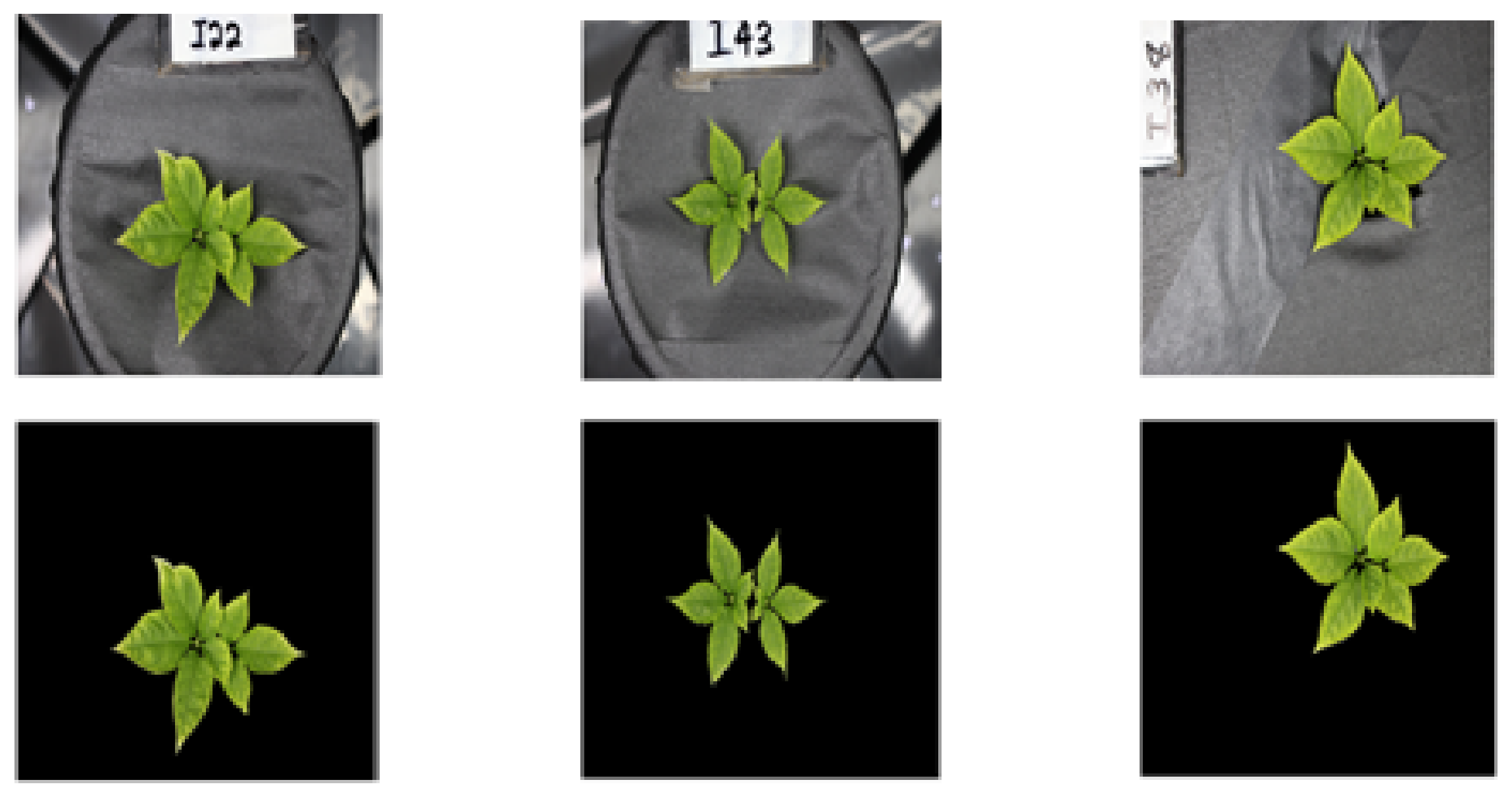
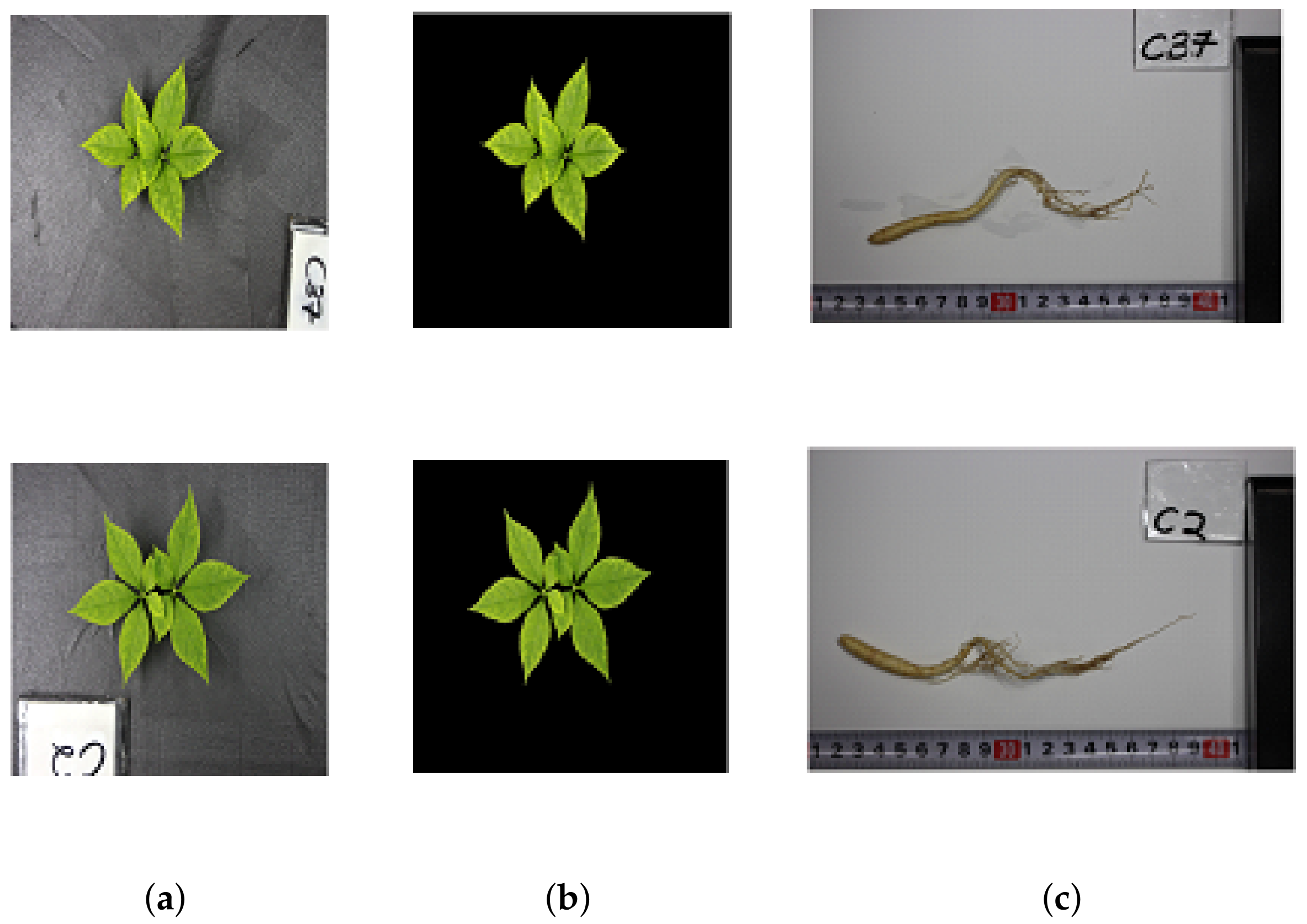
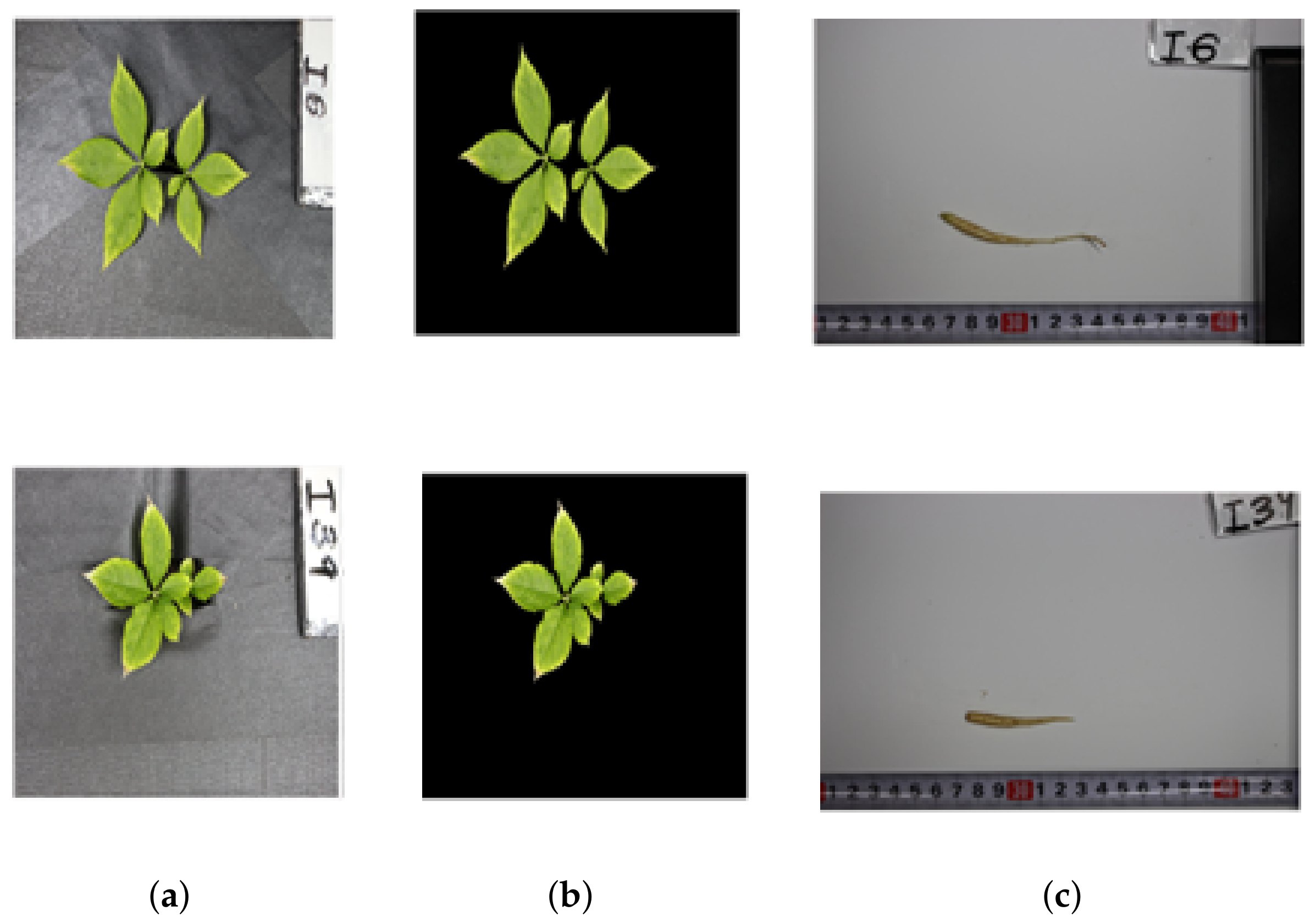
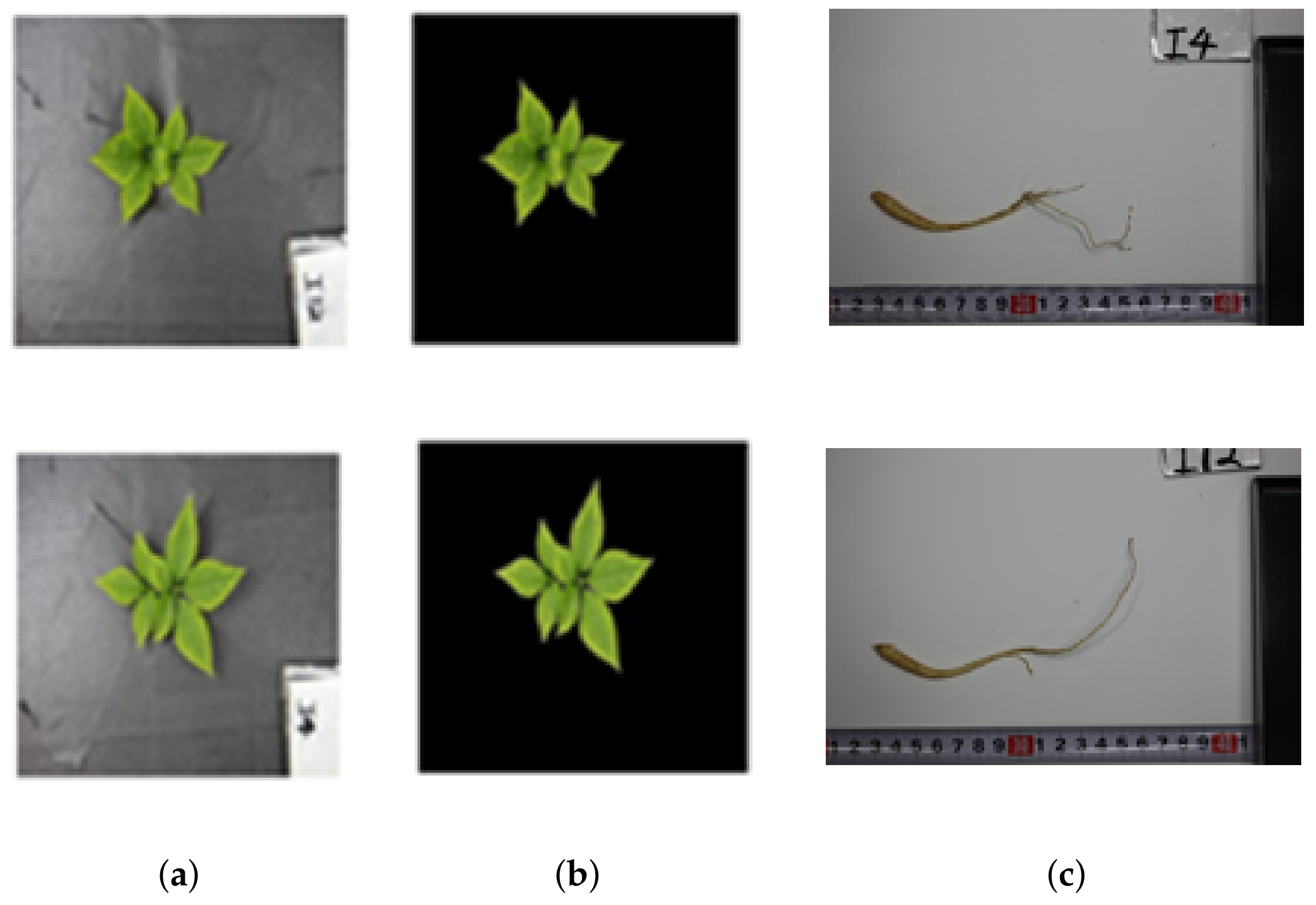
In the proposed method, various deep learning models are applied to identify biotically stressed (root rot) Korean ginseng plants based on RGB plant images. Furthermore, a new simple linear deep learning model is proposed. The proposed method involves three steps: (i) a region growing method for plant region segmentation, (ii) noise removal, and (iii) deep learning models for identifying biotically stressed (root rot) ginseng plants. In the first phase, the plant region is segmented from the raw RGB images using the seeded region growing method. Then, in the second step, the noise regions are removed from the segmented plant region. Finally, these noise-free segmented plant images are given as input to the proposed deep learning model to identify root-rot-diseased ginseng plants. The main advantages of the proposed method are that it (i) is non-destructive, (ii) is high throughput, (iii) does not require ground-truth images, (iv) is robust, and (v) is cost effective.
The structure of the remaining portion of this paper is as follows:
Section 2 describes the materials and methods.
Section 3 explains the results and provides a discussion, and finally, conclusions are given in
Section 4.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











