
Design of Fast Acquisition System and Analysis of Geometric Feature for Highway Tunnel Lining Cracks Based on Machine Vision


Abstract
:1. Introduction
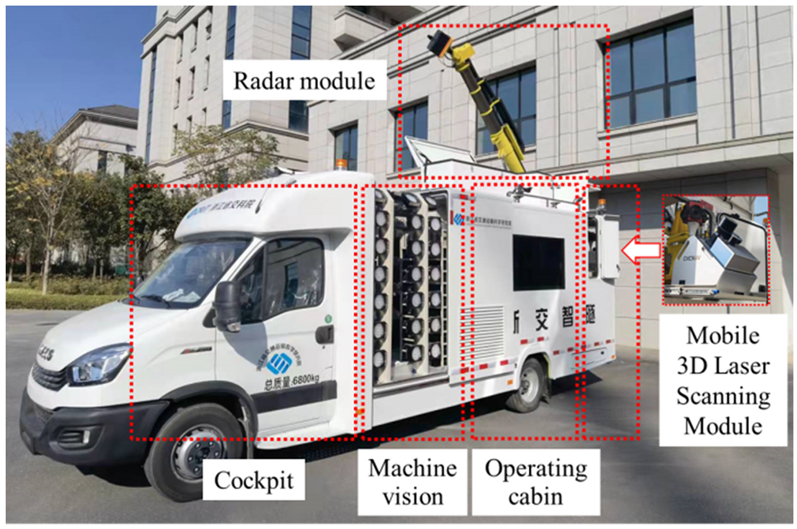
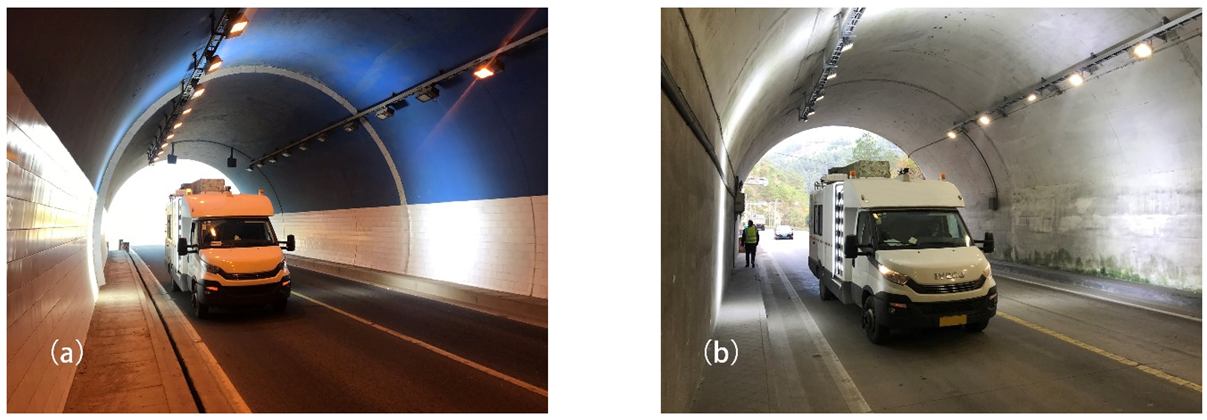
2. Development of Tunnel Image Fast Acquisition System
3. Research on Image Acquisition System of Lining Cracks
3.1. Shooting System Hardware Analysis
3.1.1. Shooting System Selection Subsubsection
3.1.2. Shooting Range Calculation
3.1.3. Focal Length Calculation
3.2. The Method of Fast Acquisition Parameter Calculation
3.2.1. Lens Zoom
3.2.2. Camera Focus
- ➀
- Object distance calculation: According to Section 3.1.3, the common working distance of the camera is 2.0–7.0 m.
- ➁
- Determination of focal length zoom: Round the calculated working distance of the camera to an integer and calculate the corresponding zoom of the focal length. Furthermore, adjust it respectively after rounding to expand the scope of application. There are 18 sets of data in total, as listed in Table 1.
- ➂
- According to the determined parameters, conduct an experiment to determine the focus corresponding to the clear image under each group of object distances and focal lengths.
- ➃
- Take the focus corresponding to the clear image as the dependent variable, the object distance u, and the focal length zoom as the independent variables, and perform binary fitting to establish the corresponding functional relationship.
3.2.3. Camera Attitude
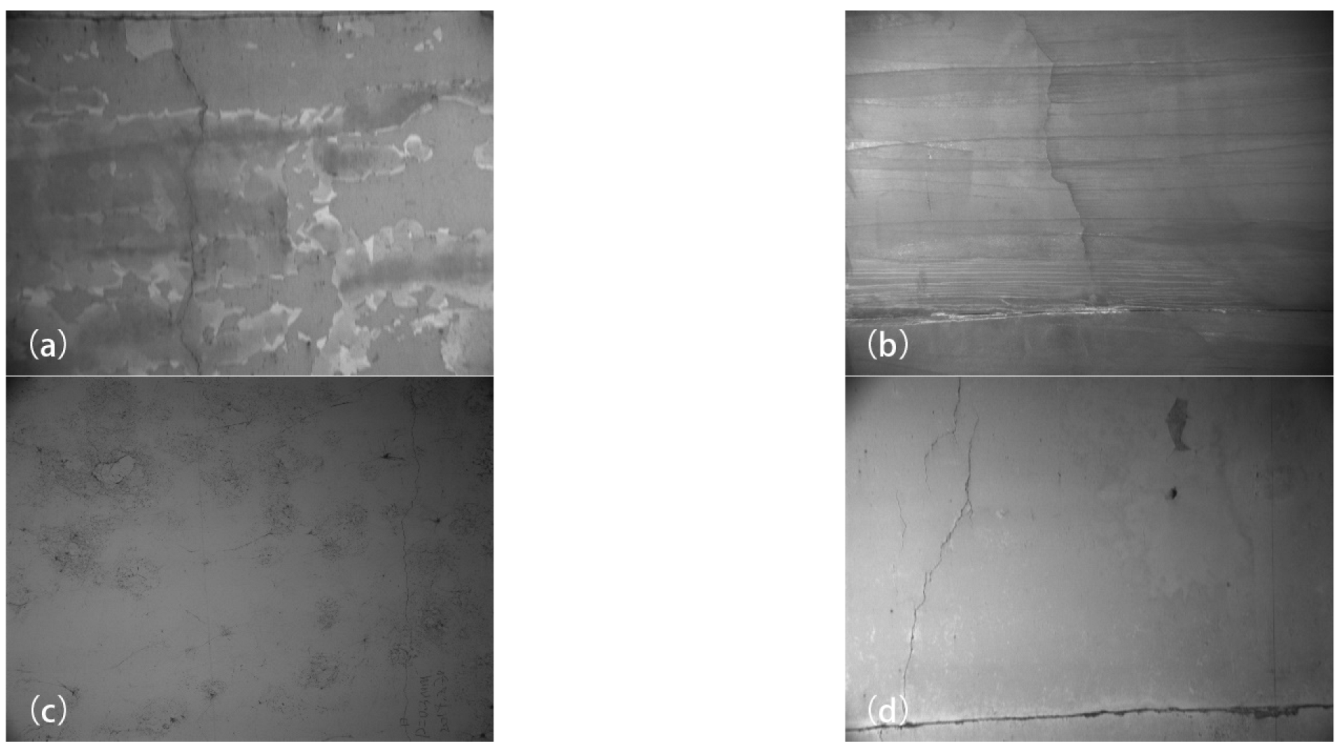
4. Analysis of Crack Characteristics in Tunnel Lining Images
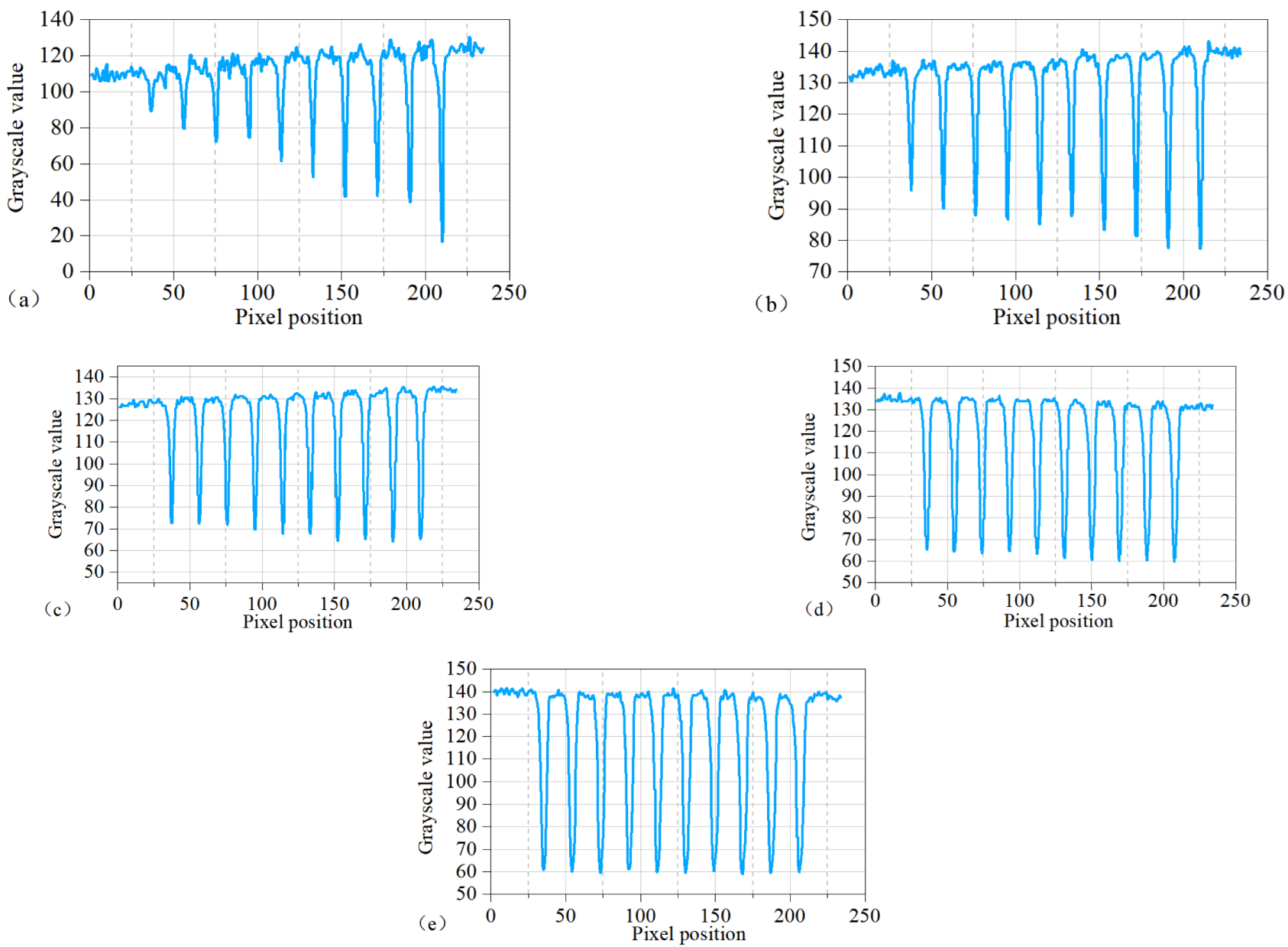
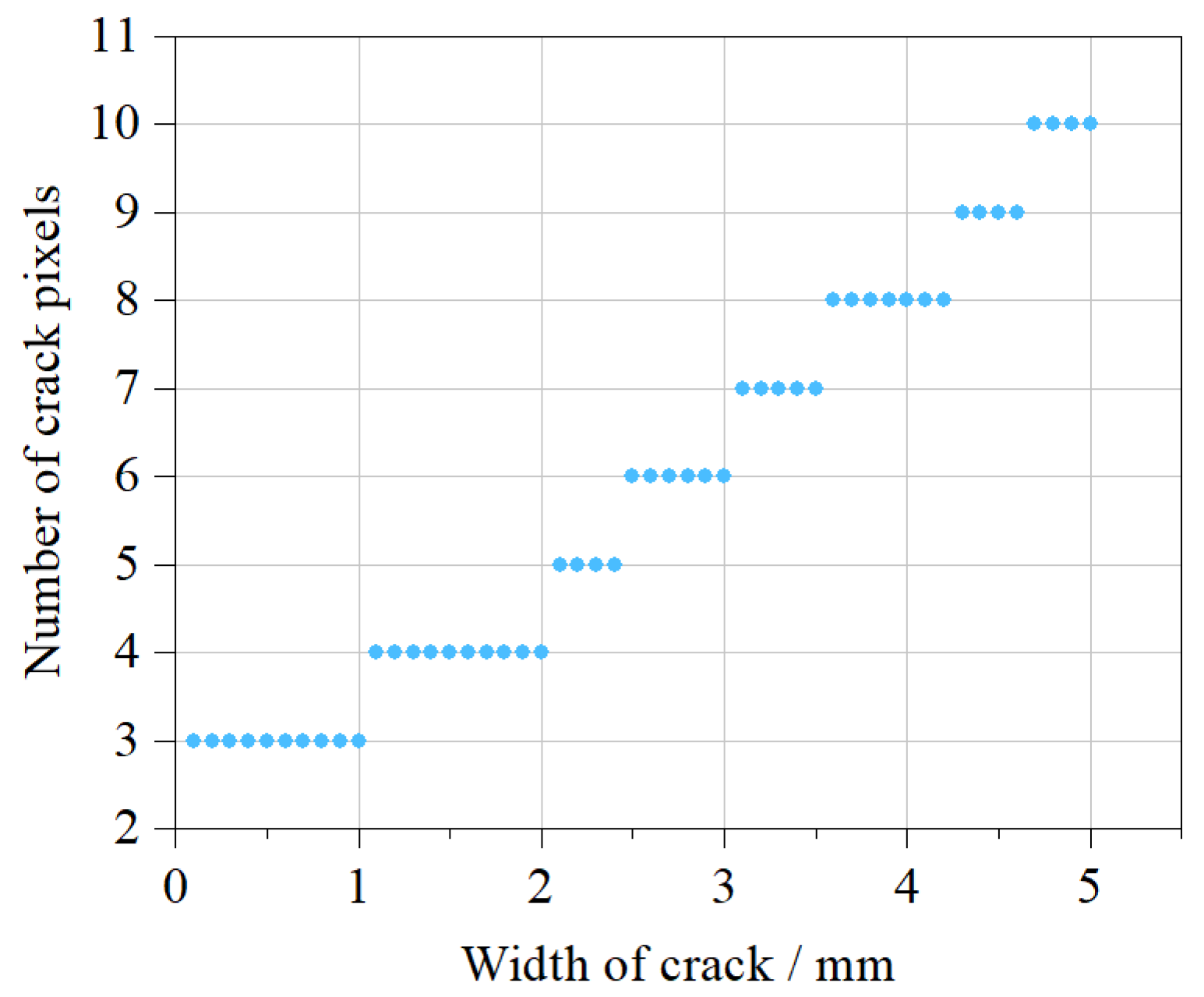
4.1. Crack Width Extraction Model
- ➀
- In the interval of the crack width from 0.1 mm to 1.4 mm, the gray difference of the crack shows a linear change, which is defined as the No.1 linear interval.
- ➁
- In the interval of 1.5 mm~2.6 mm, the gray difference of the cracks still shows a linear change, but the slope is smaller than that of the first linear area, which is defined as the No.2 linear interval.
- ➂
- In the interval of 2.7 mm~5.0 mm, the gray difference of the crack basically changes steadily, which is defined as the smooth interval.
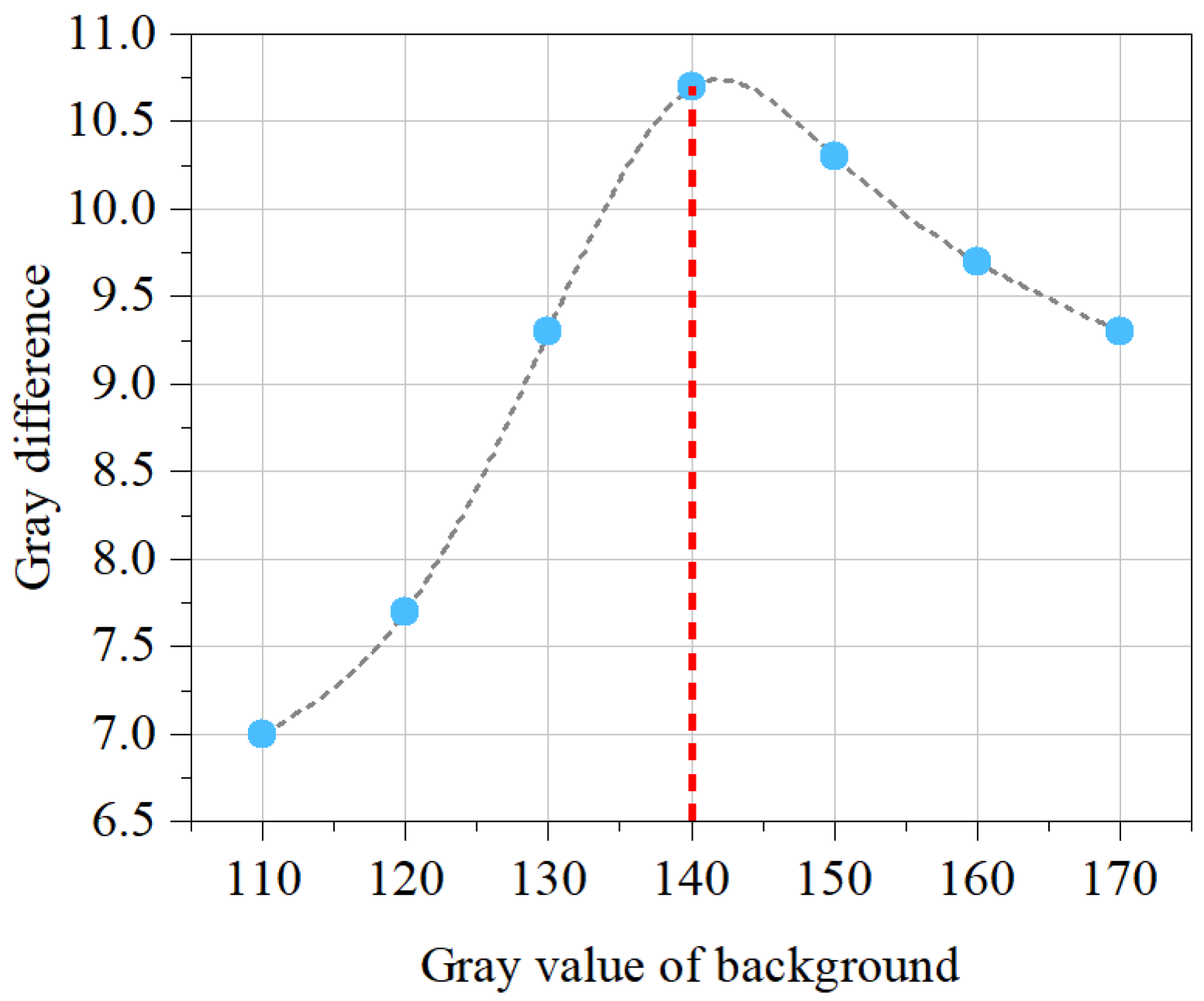
4.2. Best Gray Value for Crack Extraction
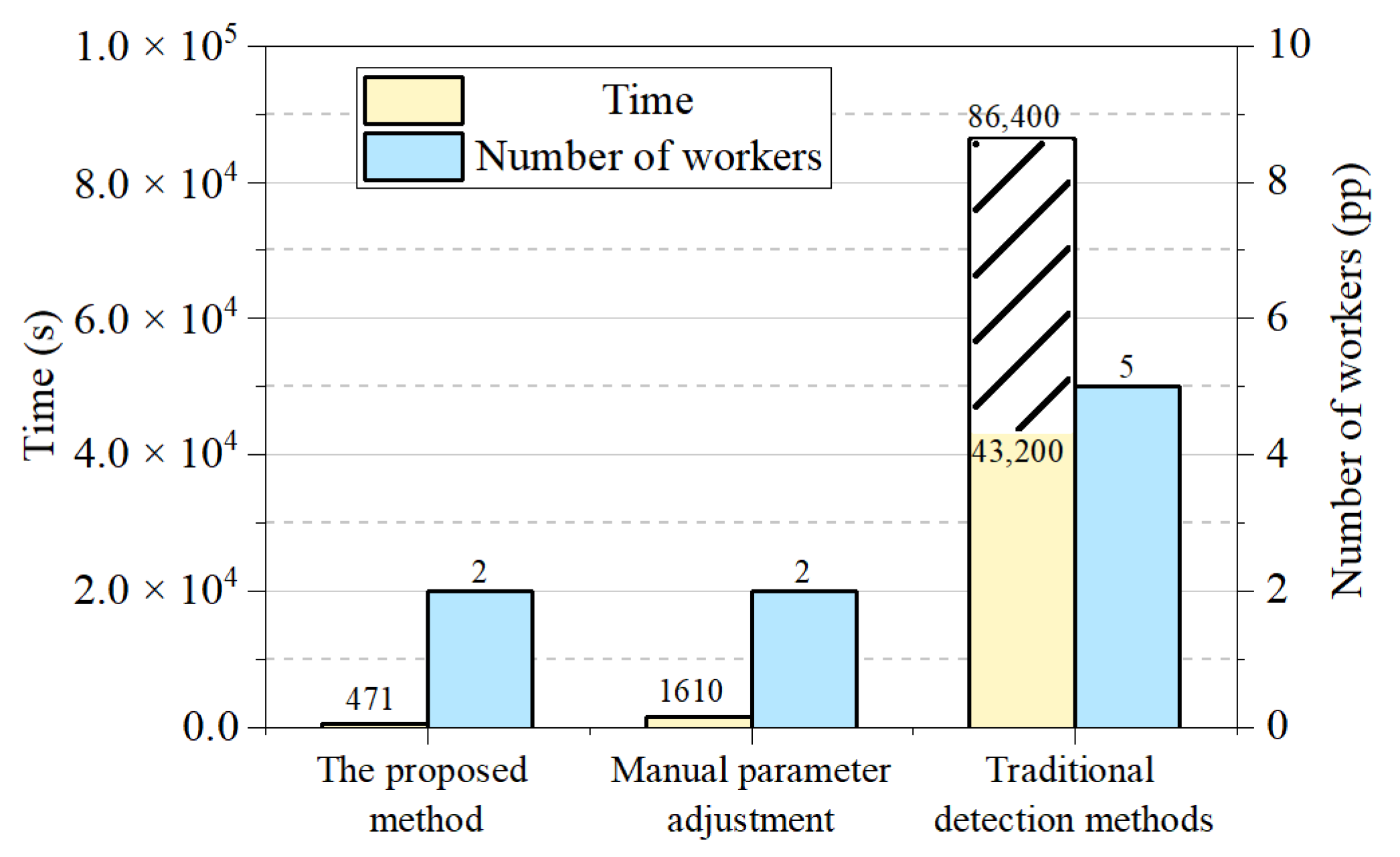
5. Result
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ge, M.; Sun, L. Design and development of highway tunnel maintenance and management system. J. Southeast Univ. 2015, 31, 137–142. [Google Scholar] [CrossRef]
- Huang, M.Q.; Nini, J.; Zhang, Q.B. BIM, machine learning and computer vision techniques in underground construction: Current status and future perspectives. Tunn. Undergr. Space Technol. 2021, 108, 103677. [Google Scholar] [CrossRef]
- Han, C.-S.; Yu, S.-N.; Jang, J.-H. Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel. Autom. Constr. 2007, 16, 255–261. [Google Scholar] [CrossRef]
- Lee, S.Y.; Lee, S.H.; Shin, D.I.; Son, Y.K.; Han, C.S. Development of an inspection system for cracks in a concrete tunnel lining. Can. J. Civ. Eng. 2007, 34, 966–975. [Google Scholar] [CrossRef]
- Ukai, M. Advanced inspection system of tunnel wall deformation using image processing. Q. Rep. RTRI 2007, 48, 94–98. [Google Scholar] [CrossRef] [Green Version]
- Gavilán, M.; Sánchez, F.; Ramos, J.A.; Marcos, O. Mobile inspection system for high-resolution assessment of tunnels. In Proceedings of the 6th International Conference on Structural Health Monitoring of Intelligent Infrastructure, Hongkong, China, 9–11 December 2013. [Google Scholar]
- Yasuda, T.; Yamamoto, H.; Shigeta, Y. Tunnel Inspection System by using High-speed Mobile 3D Survey Vehicle: MIMM-R. J. Robot. Soc. Jpn. 2016, 34, 589–590. [Google Scholar] [CrossRef]
- Yasuda, T.; Yamamoto, H.; Enomoto, M.; Nitta, Y. Smart tunnel inspection and assessment using mobile inspection vehicle, non-contact radar and ai BT. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction: From Demonstration to Practical Use—To New Stage of Construction Robot, ISARC 2020, Kitakyushu, Japan, 27–28 October 2020; pp. 1373–1379. [Google Scholar]
- Tabrizi, K.; Celaya, M.; Miller, B.S.; Wittwer, A.; Ruzzi, L. Damage Assessment of Tunnel Lining by Mobile Laser Scanning: Pittsburgh, Pennsylvania, Implementation Phase of FHWA SHRP 2 R06G Project. Transp. Res. Rec. 2017, 2642, 166–179. [Google Scholar] [CrossRef]
- Idoux, M. Multisensor system for tunnel inspection. In Infrared Components and Their Applications; SPIE: Bellingham, WA, USA; Volume 5640, pp. 303–311.
- Wang, P.; Huang, H.; Xue, Y. Model test study of factors affecting automatic detection performance of cracks in tunnel lining. Yanshilixue Yu Gongcheng Xuebao/Chin. J. Rock Mech. Eng. 2012, 31, 1705–1714. [Google Scholar]
- Tang, Y.P.; Wang, Q.; Zong, M.L.; Jiang, J.; Zhu, Y.H. Design of Vertically-Aligned Binocular Omnistereo Vision Sensor with Face-to-Back Configuration. Chin. J. Sens. Actuators 2010, 23, 791–798. [Google Scholar]
- Gong, Y.F.; Xiao, M.Q.; Wang, S.F.; Tang, Z. Review and Developing Trend of Railway Tunnel Detection Technology. Railw. Stand. Des. 2019, 5, 93–98. [Google Scholar]
- Yang, J.; Liu, X.; Liu, X.; Zhang, P.; Peng, F. Review of Rapid Test Vehicles for Highway Tunnel Structure. J. East China Jiaotong Univ. 2018, 4, 30–38. [Google Scholar]
- Liu, X.; Li, Y.; Xue, C.; Liu, B.; Duan, Y. Optimal modeling and parameter identification for visual system of the road tunnel detection vehicle. Yi Qi Yi Biao Xue Bao/Chin. J. Sci. Instrum. 2018, 39, 152–160. [Google Scholar] [CrossRef]
- Liu, X. Design and Implementation of Road Tunnel Intelligent Detection System. Mach. Des. Manuf. 2018. Available online: https://www.cnki.com.cn/Article/CJFDTotal-JSYZ201808020.htm (accessed on 7 February 2022).
- Montero, R.; Victores, J.G.; Martínez, S.; Jardón, A.; Balaguer, C. Past, present and future of robotic tunnel inspection. Autom. Constr. 2015, 59, 99–112. [Google Scholar] [CrossRef]
- Huang, H.; Li, Q.; Zhang, D. Deep learning based image recognition for crack and leakage defects of metro shield tunnel. Tunn. Undergr. Space Technol. 2018, 77, 166–176. [Google Scholar] [CrossRef]
- Bendris, B.; Becerra, J.C. Design and Experimental Evaluation of an Aerial Solution for Visual Inspection of Tunnel-like Infrastructures. Remote Sens. 2022, 14, 195. [Google Scholar] [CrossRef]
- Shigeta, Y.; Maeda, K.; Yamamoto, H.; Yasuda, T.; Kaise, S.; Maegawa, K.; Ito, T. Tunnel deformation evaluation by mobile mapping system. In Tunnels and Underground Cities: Engineering and Innovation Meet Archaeology, Architecture and Art; CRC Press: Boca Raton, FL, USA, 2019; pp. 3097–3104. [Google Scholar]
- Cai, J.L.; Xie, X.Y.; Zhou, B.; Zhou, Y.X.; Zeng, W.C. Rapid automatic inspection system for tunnel lining based on a mobile vehicle. In Tunnels and Underground Cities: Engineering and Innovation Meet Archaeology, Architecture and Art: Volume 5: Innovation in Underground Engineering, Materials and Equipment—Part 1; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Shim, S.; Kim, J.; Cho, G.-C.; Lee, S.-W. Multiscale and adversarial learning-based semi-supervised semantic segmentation approach for crack detection in concrete structures. IEEE Access 2020, 8, 170939–170950. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Buyukozturk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object Distance/m | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
| Zoom | 5 | 5 | 20 | 30 | 30 | 40 |
| 10 | 10 | 30 | 40 | 40 | 50 | |
| 20 | 20 | 40 | 50 | 50 | 60 |
| Zoom | 5 | 10 | 20 | 30 | 40 | 50 | 60 | |
|---|---|---|---|---|---|---|---|---|
| Object Distance/m | ||||||||
| 2 | 50 | 51 | 53 | — | — | — | — | |
| 3 | 35 | 37 | 40 | — | — | — | — | |
| 4 | — | — | 30 | 36 | 40 | — | — | |
| 5 | — | — | — | 28 | 38 | 45 | — | |
| 6 | — | — | — | 28 | 31 | 35 | — | |
| 7 | — | — | — | — | 33 | 38 | 42 | |
| Interval | Fitting Formula | R2 | Width |
|---|---|---|---|
| The No.1 linear interval | 0.9903 | ||
| The No.2 linear interval | 0.9839 |
| The Width Stage | Measured Width/mm | Gray Difference | Number of Gray Pixels | Calculate Width/mm | Error Rate |
|---|---|---|---|---|---|
| No.1 linear interval | 0.50 | 31 | — | 0.546 | 9.2% |
| No.2 linear interval | 2.05 | 63 | — | 1.875 | 8.5% |
| Flat interval | 3.25 | — | 7 | 3.1–3.5 | 7.7% |
| Name | Drive Device | Number of Cameras | Camera Type | Resolution | Crack Identification Accuracy | Movement Speed |
|---|---|---|---|---|---|---|
| Proposed | automobile | 19 | area array | 1392 × 1040 | 0.1 mm | 40~60 km/h |
| MIMM-R | automobile | 16 | area array | 380,000 | 0.2 mm | 50 km/h |
| MTI-100 | wheeled track rack | 6 | line array | 7500 | 0.3 mm | 3~5 km/h |
| ODVS | robot | 1 | area array | 1280 × 720 | no data | no data |
| Aerial Solution | quadcopter | 4 | area array | 1600 × 1200 4096 × 3000 | no data | 7.2 km/h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Wang, Q.; Zhai, J.; Yuan, D.; Zhang, W.; Xie, X.; Zhou, B.; Cai, J.; Lei, Y. Design of Fast Acquisition System and Analysis of Geometric Feature for Highway Tunnel Lining Cracks Based on Machine Vision. Appl. Sci. 2022, 12, 2516. https://doi.org/10.3390/app12052516
Wang H, Wang Q, Zhai J, Yuan D, Zhang W, Xie X, Zhou B, Cai J, Lei Y. Design of Fast Acquisition System and Analysis of Geometric Feature for Highway Tunnel Lining Cracks Based on Machine Vision. Applied Sciences. 2022; 12(5):2516. https://doi.org/10.3390/app12052516
Chicago/Turabian StyleWang, Haozheng, Qiang Wang, Junli Zhai, Dongyang Yuan, Weikang Zhang, Xiongyao Xie, Biao Zhou, Jielong Cai, and Yuanshuai Lei. 2022. "Design of Fast Acquisition System and Analysis of Geometric Feature for Highway Tunnel Lining Cracks Based on Machine Vision" Applied Sciences 12, no. 5: 2516. https://doi.org/10.3390/app12052516
APA StyleWang, H., Wang, Q., Zhai, J., Yuan, D., Zhang, W., Xie, X., Zhou, B., Cai, J., & Lei, Y. (2022). Design of Fast Acquisition System and Analysis of Geometric Feature for Highway Tunnel Lining Cracks Based on Machine Vision. Applied Sciences, 12(5), 2516. https://doi.org/10.3390/app12052516