
Identification and Reconstruction of Impact Load for Lightweight Design of Production Equipment

Abstract
:1. Introduction
2. Methodology for Identifying Unknown Impact Load
2.1. Identification of Impact Load
2.2. Impact Load Reconstruction through Strain–Load Conversion
3. Validation with Specimen Experiments
3.1. Experimental Set-Up
3.2. Experimental Results
3.3. Reconstruction of Impact Load
3.4. Validation of Reconstructed Impact Load with Structural Strain
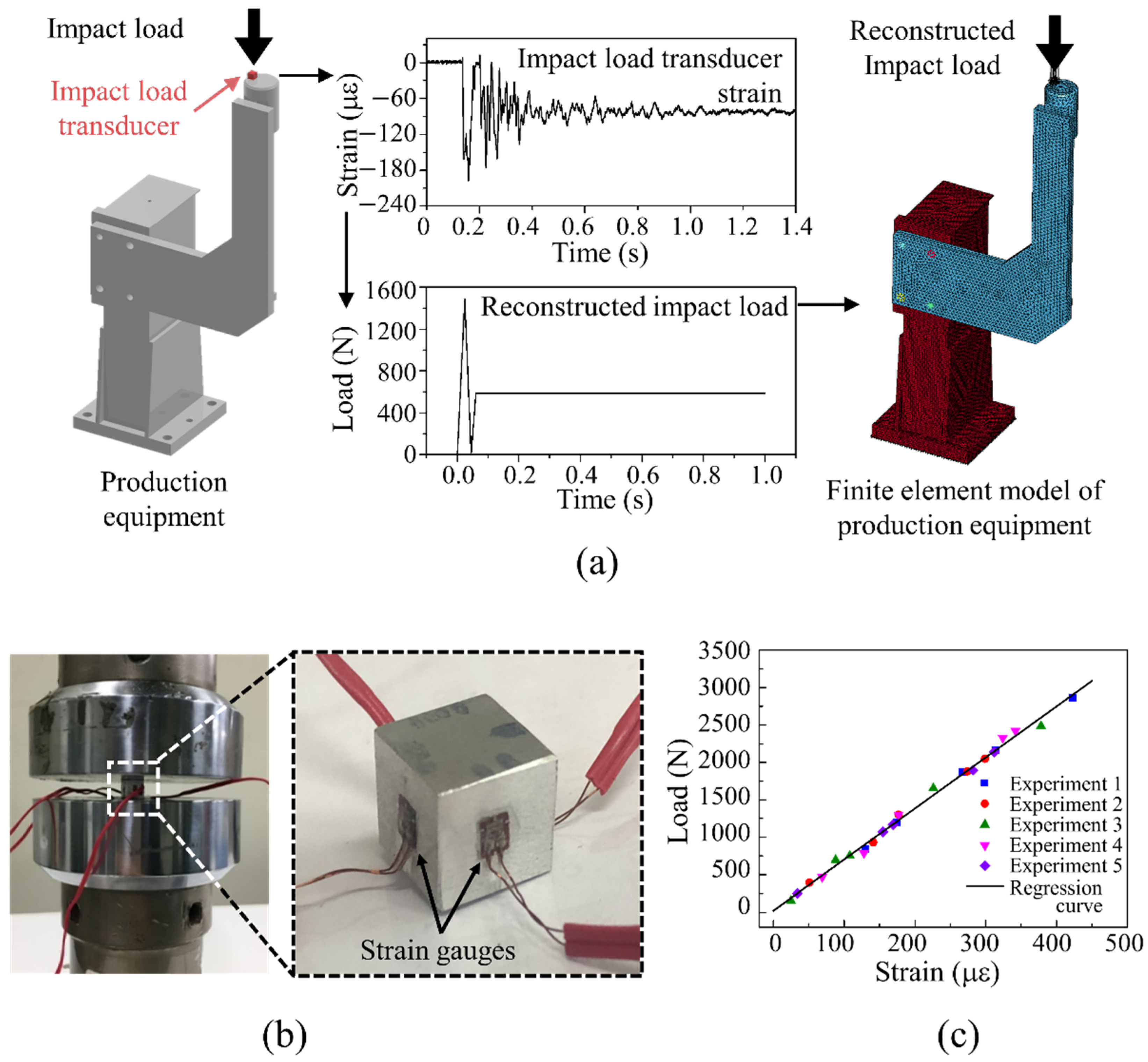
4. Validation with Automotive Production Equipment: Jig Structure
4.1. Experimental Set-Up
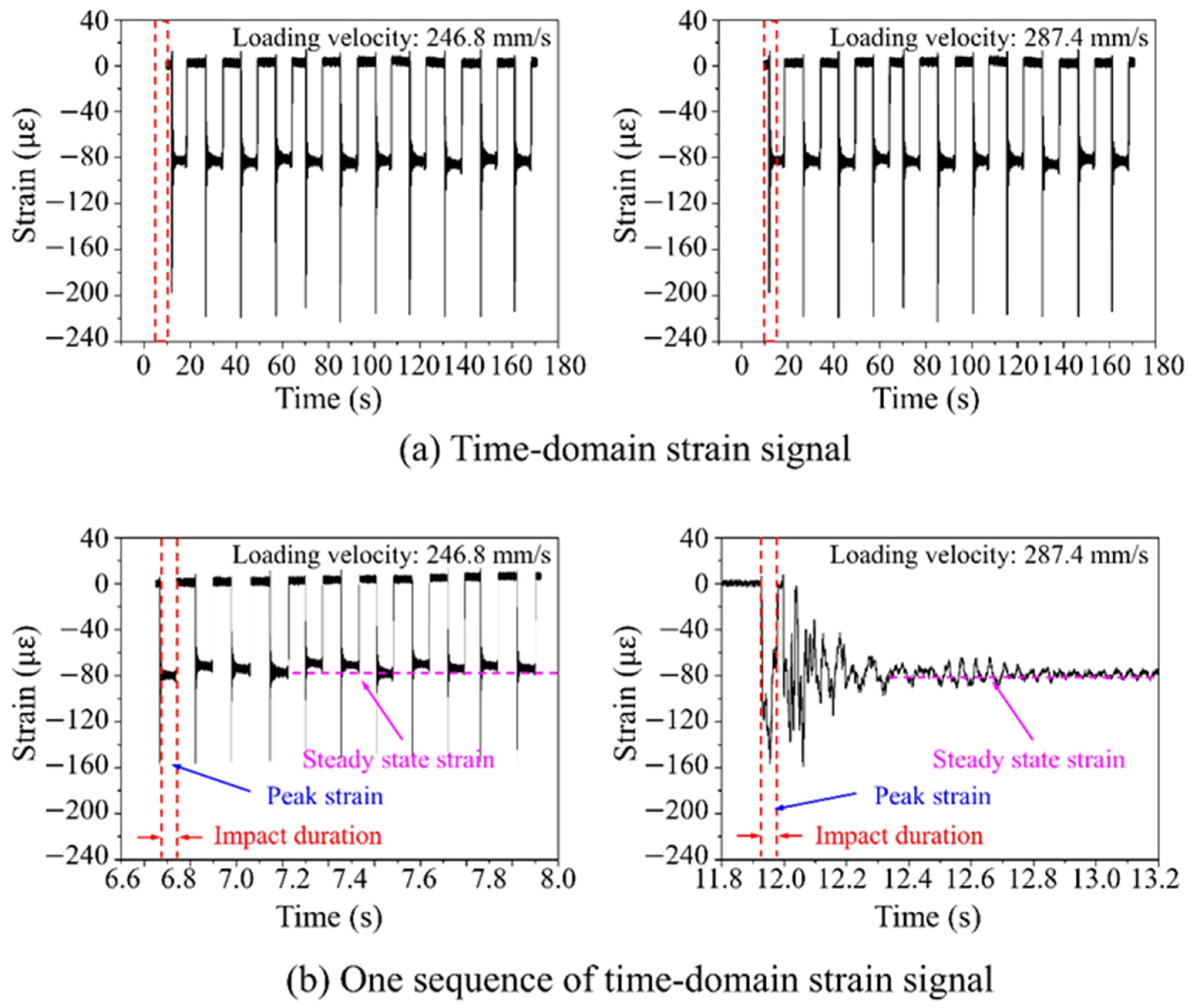
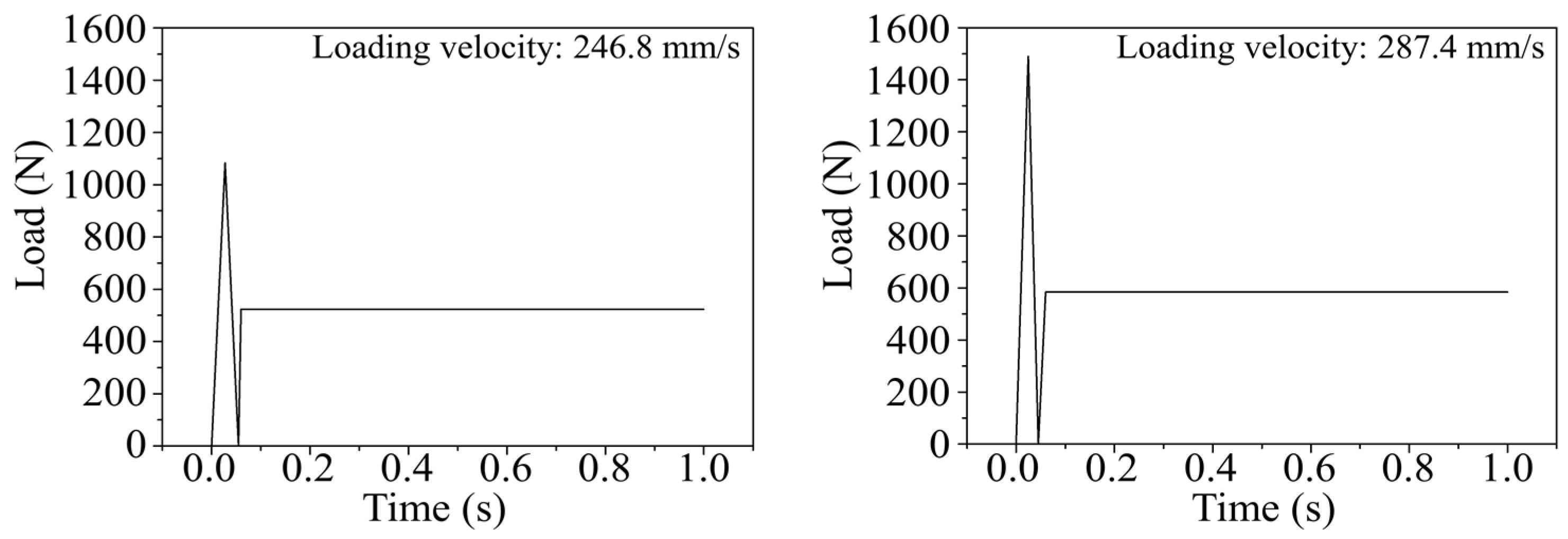
4.2. Reconstruction of Impact Load
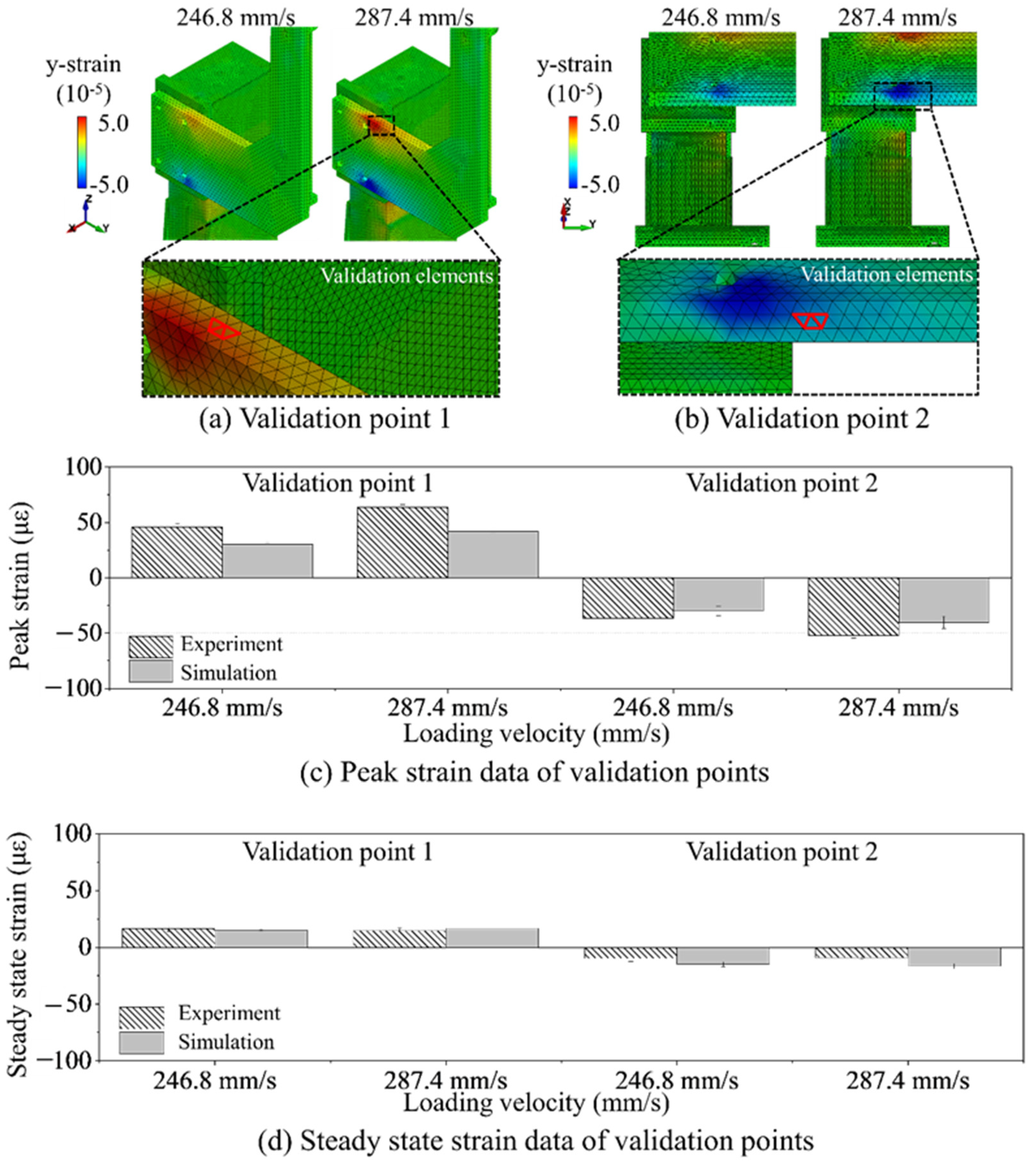
4.3. Numerical Model
4.4. Validation of Reconstructed Impact Load with Production Equipment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fan, J.; Njuguna, J. An introduction to lightweight composite materials and their use in transport structures. In Lightweight Composite Structures in Transport; Njuguna, J., Ed.; Woodhead Publishing: Amsterdam, The Netherlands, 2016; pp. 3–34. [Google Scholar]
- Batista, M.D.R.; Drzal, L.T.; Kiziltas, A.; Mielewski, D. Hybrid cellulose-inorganic reinforcement polypropylene composites: Lightweight materials for automotive applications. Polym. Compos. 2020, 41, 1074–1089. [Google Scholar] [CrossRef]
- Peng, X.; Sui, Y. Lightweight topology optimization with consideration of the fail-safe design principle for continuum structures. Eng. Optim. 2021, 53, 32–48. [Google Scholar] [CrossRef]
- Li, J.; Wang, D. Study on application of MSOT method for lightweight design of automobile body structure. Adv. Mech. Eng. 2020, 12, 1687814020965049. [Google Scholar]
- Zhao, H.; Wang, R.; Li, Q.M.; Wu, H.; Hou, C.-C.; An, G. Experimental and numerical investigation on impact and post-impact behaviours of H-shaped steel members. Eng. Struct. 2020, 216, 110750. [Google Scholar] [CrossRef]
- Ince, S.T.; Kumar, A.; Park, D.K.; Paik, J.K. An advanced technology for structural crashworthiness analysis of a ship colliding with an ice-ridge: Numerical modelling and experiments. Int. J. Impact Eng. 2017, 110, 112–122. [Google Scholar] [CrossRef]
- Khan, M.R.; Sonawane, A. Prediction of impact response in construction safety helmet using FEA. J. Eng. Des. Technol. 2019, 18, 557–566. [Google Scholar] [CrossRef]
- Kishi, N.; Ohno, T.; Konno, H.; Bhatti, A.Q. Dynamic Response Analysis for a Large-scale RC Girder Under a Falling-weight Impact Loading. Adv. Eng. Struct. Mech. Const. 2006, 140, 99–109. [Google Scholar]
- Gilardi, G.; Sharf, I. Literature survey of contact dynamics modelling. Mech. Mach. Theory 2002, 37, 1213–1239. [Google Scholar] [CrossRef]
- Kurşun, A.; Şenel, M.; Enginsoy, H.M.; Bayraktar, E. Effect of impactor shapes on the low velocity impact damage of sandwich composite plate: Experimental study and modelling. Compos. B Eng. 2016, 86, 143–151. [Google Scholar] [CrossRef]
- Jacquelin, E.; Hamelin, P. Force recovered from three recorded strains. Int. J. Solids Struct. 2003, 40, 73–88. [Google Scholar] [CrossRef]
- Hu, N.; Fukunaga, H.; Matsumoto, S.; Yan, B.; Peng, X.H. An efficient approach for identifying impact force using embedded piezoelectric sensors. Int. J. Impact Eng. 2007, 34, 1258–1271. [Google Scholar] [CrossRef]
- Qiao, B.; Zhang, X.; Gao, J.; Chen, X. Impact-force sparse reconstruction from highly incomplete and inaccurate measurements. J. Sound Vib. 2016, 376, 72–94. [Google Scholar] [CrossRef]
- Sun, L.; Li, Y.; Zhu, W.; Zhang, W. Structural response reconstruction in physical coordinate from deficient measurements. Eng. Struct. 2020, 212, 110484. [Google Scholar] [CrossRef]
- Law, S.S.; Chan, T.H.T.; Zeng, Q.H. Moving Force Identification: A Time Domain Method. J. Sound Vib. 1997, 201, 1–22. [Google Scholar] [CrossRef]
- Vyas, N.S.; Wicks, A.L. Reconstruction of turbine blade forces from response data. Mech. Mach. Theory 2001, 36, 177–188. [Google Scholar] [CrossRef]
- Jacquelin, E.; Bennani, A.; Hamelin, P. Force reconstruction: Analysis and regularization of a deconvolution problem. J. Sound Vib. 2003, 265, 81–107. [Google Scholar] [CrossRef]
- Kim, S.J.; Lee, S.W. Experimental identification for inverse problem of a mechanical system with a non-minimum phase based on singular value decomposition. J. Mech. Sci. Technol. 2008, 22, 1504–1509. [Google Scholar] [CrossRef]
- Qiao, B.; Chen, X.; Xue, X.; Luo, X.; Liu, R. The application of cubic B-spline collocation method in impact force identification. Mech. Syst. Signal Process. 2015, 64, 413–427. [Google Scholar] [CrossRef]
- Gunawan, F.E. Levenberg–Marquardt iterative regularization for the pulse-type impact-force reconstruction. J. Sound Vib. 2012, 331, 5424–5434. [Google Scholar] [CrossRef]
- Ma, C.-K.; Chang, J.-M.; Lin, D.-C. Input Forces Estimation of Beam Structures by an Inverse Method. J. Sound Vib. 2003, 259, 387–407. [Google Scholar] [CrossRef]
- De Simone, M.E.; Ciampa, F.; Meo, M. A hierarchical method for the impact force reconstruction in composite structures. Smart Mater. Struct. 2019, 28, 085022. [Google Scholar] [CrossRef]
- Akhavan, F.; Watkins, S.; Chandrashekhara, K. Prediction of Impact Contact Forces of Composite Plates Using Fiber Optic Sensors and Neural Networks. Mech. Adv. Mater. Struct. 2000, 7, 195–205. [Google Scholar] [CrossRef]
- Yuan, F.-G.; Zargar, S.A.; Chen, Q.; Wang, S. Machine learning for structural health monitoring: Challenges and opportunities. In Proceedings of SPIE 11379, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020; SPIE: Bellingham, WA, USA, 2020; p. 1137903. [Google Scholar]
- Zargar, S.A.; Yuan, F.-G. Impact diagnosis in stiffened structural panels using a deep learning approach. Struct. Health Monit. 2021, 20, 681–691. [Google Scholar] [CrossRef]
- Ganeshan, V.; Dattakumar, S.S. Converting Dynamic Impact Events to Equivalent Static Loads in Vehicle Chassis. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading Angle: 32° | Loading Angle: 47° | Loading Angle: 65° | ||||
|---|---|---|---|---|---|---|
| Set | Peak Strain | Impact Duration (s) | Peak Strain | Impact Duration (s) | Peak Strain | Impact Duration (s) |
| 1. | −79.25 | 0.0044 | −113.25 | 0.0044 | −167.75 | 0.0044 |
| 2. | −78.25 | 0.0044 | −128.75 | 0.0048 | −166.00 | 0.0044 |
| 3. | −81.75 | 0.0044 | −123.50 | 0.0048 | −163.75 | 0.0044 |
| 4. | −79.75 | 0.0044 | −119.25 | 0.0049 | −170.00 | 0.0044 |
| 5. | −78.00 | 0.0044 | −120.00 | 0.0044 | −169.25 | 0.0044 |
| 6. | −75.50 | 0.0044 | −115.00 | 0.0049 | −171.00 | 0.0049 |
| 7. | −84.50 | 0.0044 | −129.75 | 0.0044 | −166.75 | 0.0044 |
| 8. | −77.00 | 0.0044 | −121.75 | 0.0040 | −167.00 | 0.0044 |
| 9. | −74.25 | 0.0049 | −116.00 | 0.0049 | −167.25 | 0.0044 |
| 10. | −72.00 | 0.0044 | −125.75 | 0.0044 | −175.25 | 0.0044 |
| Standard deviation | 3.63 | 0.0002 | 5.68 | 0.0003 | 3.18 | 0.0002 |
| Average | −79.25 | 0.0045 | −121.30 | 0.0046 | −168.40 | 0.0045 |
| Validation Point 1 | Validation Point 2 | |||||
|---|---|---|---|---|---|---|
| 65° | 47° | 32° | 65° | 47° | 32° | |
| Set | ||||||
| 1. | 78.00 | 52.00 | 39.00 | −81.00 | −51.00 | −41.00 |
| 2. | 76.00 | 57.00 | 36.00 | −84.00 | −60.00 | −39.00 |
| 3. | 76.00 | 51.00 | 37.00 | −83.00 | −62.00 | −39.00 |
| 4. | 74.00 | 48.00 | 38.00 | −79.00 | −64.00 | −41.00 |
| 5. | 74.00 | 57.00 | 38.00 | −86.00 | −60.00 | −42.00 |
| 6. | 71.00 | 58.00 | 38.00 | −81.00 | −55.00 | −39.00 |
| 7. | 78.00 | 56.00 | 37.00 | −80.00 | −58.00 | −43.00 |
| 8. | 73.00 | 52.00 | 36.00 | −81.00 | −53.00 | −41.00 |
| 9. | 76.00 | 54.00 | 37.00 | −77.00 | −51.00 | −42.00 |
| 10. | 78.00 | 50.00 | 36.00 | −75.00 | −56.00 | −39.00 |
| Standard deviation | 2.37 | 3.41 | 1.03 | 3.23 | 1.55 | 1.65 |
| Average | 75.40 | 53.50 | 37.20 | −80.70 | −57.00 | −40.50 |
| Loading Velocity: 246.8 (mm/s) | Loading Velocity: 287.4 (mm/s) | |||||
|---|---|---|---|---|---|---|
| Set | Peak Strain (με) | Impact Duration (s) | Steady State Strain (με) | Peak Strain (με) | Impact Duration (s) | Steady State Strain (με) |
| 1. | −159.00 | 0.05378 | −79.50 | −197.00 | 0.04953 | −81.50 |
| 2. | −157.00 | 0.05566 | −74.00 | −218.75 | 0.04213 | −82.25 |
| 3. | −155.00 | 0.05664 | −77.50 | −219.25 | 0.04259 | −83.50 |
| 4. | −154.25 | 0.05518 | −70.0 | −218.00 | 0.04200 | −80.25 |
| 5. | −156.00 | 0.05810 | −71.00 | −210.75 | 0.04199 | −82.75 |
| 6. | −152.25 | 0.05469 | −78.00 | −222.75 | 0.04249 | −84.50 |
| 7. | −155.75 | 0.05615 | −70.00 | −215.50 | 0.04248 | −82.50 |
| 8. | −156.75 | 0.05811 | −74.00 | −216.75 | 0.04199 | −82.25 |
| 9. | −155.25 | 0.05420 | −71.00 | −218.75 | 0.04200 | −85.50 |
| 10. | −155.50 | 0.05469 | −71.25 | −218.50 | 0.04199 | −81.00 |
| 11. | −158.50 | 0.05468 | −74.00 | −213.75 | 0.04248 | −83.25 |
| Standard deviation | 1.89 | 0.00148 | 3.39 | 6.87 | 0.00222 | 1.51 |
| Average | −155.90 | 0.05630 | −73.66 | −215.43 | 0.04288 | −82.66 |
| Loading Velocity: 246.8 (mm/s) | Loading Velocity: 287.4 (mm/s) | |||||
|---|---|---|---|---|---|---|
| Set | Validation Point 1 (με) | Validation Point 2 (με) | Validation Point 3 (με) | Validation Point 1 (με) | Validation Point 2 (με) | Validation Point 3 (με) |
| 1. | 45.00 | −41.00 | −153.00 | 66.00 | −54.00 | −212.00 |
| 2. | 44.00 | −39.00 | −150.00 | 64.00 | −54.00 | −215.00 |
| 3. | 44.00 | −38.00 | −150.00 | 65.00 | −52.00 | −210.00 |
| 4. | 44.00 | −39.00 | −150.00 | 64.00 | −53.00 | −211.00 |
| 5. | 45.00 | −38.00 | −150.00 | 62.00 | −55.00 | −210.00 |
| 6. | 45.00 | −38.00 | −149.00 | 65.00 | −51.00 | −208.00 |
| 7. | 46.00 | −38.00 | −148.00 | 66.00 | −50.00 | −207.00 |
| 8. | 45.00 | −36.00 | −148.00 | 64.00 | −52.00 | −209.00 |
| 9. | 49.00 | −34.00 | −145.00 | 63.00 | −52.00 | −210.00 |
| 10. | 49.00 | −32.00 | −143.00 | 62.00 | −50.00 | −208.00 |
| 11. | 49.00 | −32.00 | −146.00 | 62.00 | −52.00 | −206.00 |
| Standard deviation | 2.07 | 2.96 | 2.80 | 1.51 | 1.62 | 2.50 |
| Average | 45.91 | −36.82 | −148.36 | 63.91 | −52.27 | −209.64 |
| Loading Velocity: 246.8 (mm/s) | Loading Velocity: 287.4 (mm/s) | |||||
|---|---|---|---|---|---|---|
| Set | Validation Point 1 (με) | Validation Point 2 (με) | Validation Point 3 (με) | Validation Point 1 (με) | Validation Point 2 (με) | Validation Point 3 (με) |
| 1. | 15.00 | −12.00 | −47.00 | 17.00 | −11.00 | −46.00 |
| 2. | 14.00 | −11.00 | −45.00 | 16.00 | −10.00 | −43.00 |
| 3. | 15.00 | −11.00 | −45.00 | 15.00 | −10.00 | −43.00 |
| 4. | 15.00 | −11.00 | −45.00 | 15.00 | −10.00 | −42.00 |
| 5. | 15.00 | −10.00 | −43.00 | 15.00 | −9.00 | −42.00 |
| 6. | 16.00 | −10.00 | −44.00 | 15.00 | −9.00 | −42.00 |
| 7. | 17.00 | −11.00 | −45.00 | 14.00 | −9.00 | −41.00 |
| 8. | 18.00 | −9.00 | −41.00 | 15.00 | −8.00 | −40.00 |
| 9. | 19.00 | −8.00 | −42.00 | 14.00 | −8.00 | −42.00 |
| 10. | 18.00 | −7.00 | −40.00 | 13.00 | −9.00 | −41.00 |
| 11. | 19.00 | −7.00 | −41.00 | 13.00 | −8.00 | −41.00 |
| Standard deviation | 1.81 | 1.74 | 2.21 | 1.19 | 0.98 | 1.58 |
| Average | 16.45 | −9.73 | −43.45 | 14.73 | −9.18 | −42.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, J.; Choi, S.; Hwang, J.; Yoon, J.; Kang, H.; Kim, D. Identification and Reconstruction of Impact Load for Lightweight Design of Production Equipment. Appl. Sci. 2022, 12, 2870. https://doi.org/10.3390/app12062870
Oh J, Choi S, Hwang J, Yoon J, Kang H, Kim D. Identification and Reconstruction of Impact Load for Lightweight Design of Production Equipment. Applied Sciences. 2022; 12(6):2870. https://doi.org/10.3390/app12062870
Chicago/Turabian StyleOh, Jungwhan, Sunghoon Choi, Jiyoung Hwang, Jaekeun Yoon, Haejung Kang, and Dongchoul Kim. 2022. "Identification and Reconstruction of Impact Load for Lightweight Design of Production Equipment" Applied Sciences 12, no. 6: 2870. https://doi.org/10.3390/app12062870
APA StyleOh, J., Choi, S., Hwang, J., Yoon, J., Kang, H., & Kim, D. (2022). Identification and Reconstruction of Impact Load for Lightweight Design of Production Equipment. Applied Sciences, 12(6), 2870. https://doi.org/10.3390/app12062870