1. Introduction
The most significant technological operations in the sugar beet harvesting process are digging the root crops out of the soil and removing the uncut leaves [
1,
2,
3]. Sugar beet haulms have suitable nutritional properties and can be used as feed in animal husbandry in green form and silage [
3,
4]. Sugar beet haulms are now widely used as a raw material in the production of biogas and organic fertilizer, which can be applied to the soil immediately after its cutting and disintegrating.
The use of asymmetric machine-tractor units in harvesting sugar beet and fodder beet haulm is quite justified. In this case, the stable motion of such a harvesting unit should be understood as the one in which the deviation of its trajectory under the influence of random disturbing factors (perturbed trajectory) from the trajectory without the action of these factors (unperturbed trajectory) is within the limits of permissible values. These permissible values can be considered as such agrotechnical requirements, which ensure the quality of the technological process of harvesting the haulm while reducing energy costs, reliability of operation, and the same.
The theoretical study of motion stability of agricultural machines and machine units is based on the basic provisions of motion stability of complex tracking dynamic systems. It is based on the study of perturbed and unperturbed motions, described by systems of differential equations of their motion in the horizontal plane [
5,
6,
7,
8].
The papers [
5,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17] are devoted to studying the motion stability of agricultural machine-tractor units using computational mathematical models of their motion (functioning). The theoretical study of the plane-parallel motion of asymmetric machine-tractor unit and some questions concerning the stability of its motion in the horizontal plane are thoroughly considered in the article [
18,
19].
The effective use of trailed haulm harvesters in the harvesting of haulm is caused by the need to ensure their stable movement in the horizontal plane because, in this case, such harvesting unit is usually asymmetrical. The solution to this issue is an urgent scientific and technical problem, which still does not have a sufficiently complete solution. Part of the difficulty in solving it lies in how the trailed haulm harvester is connected to the energy vehicle (tractor) used. Of the two possible options for connecting a trailed harvester to the rear tractor unit, rigid and articulated, both lead to the creation of asymmetric machine-tractor units, each of which has its features and disadvantages. Therefore, improving the trajectory performance and efficient operation is relevant for all trailed haulm harvesters.
The study aims to determine the parameters of stable plane-parallel motion of asymmetric haulm machine and tractor unit based on numerical computer simulation of the obtained analytical dependencies.
2. Materials and Methods
2.1. Method for Compiling the Mathematical Model of the Harvesting Unit
This study uses higher mathematics methods to transform systems of differential equations, the theory of stability of motion, automatic regulation, behavioral studies of tracking systems, compiling computer programs, conducting numerical calculations, building graphical dependencies, and their analysis.
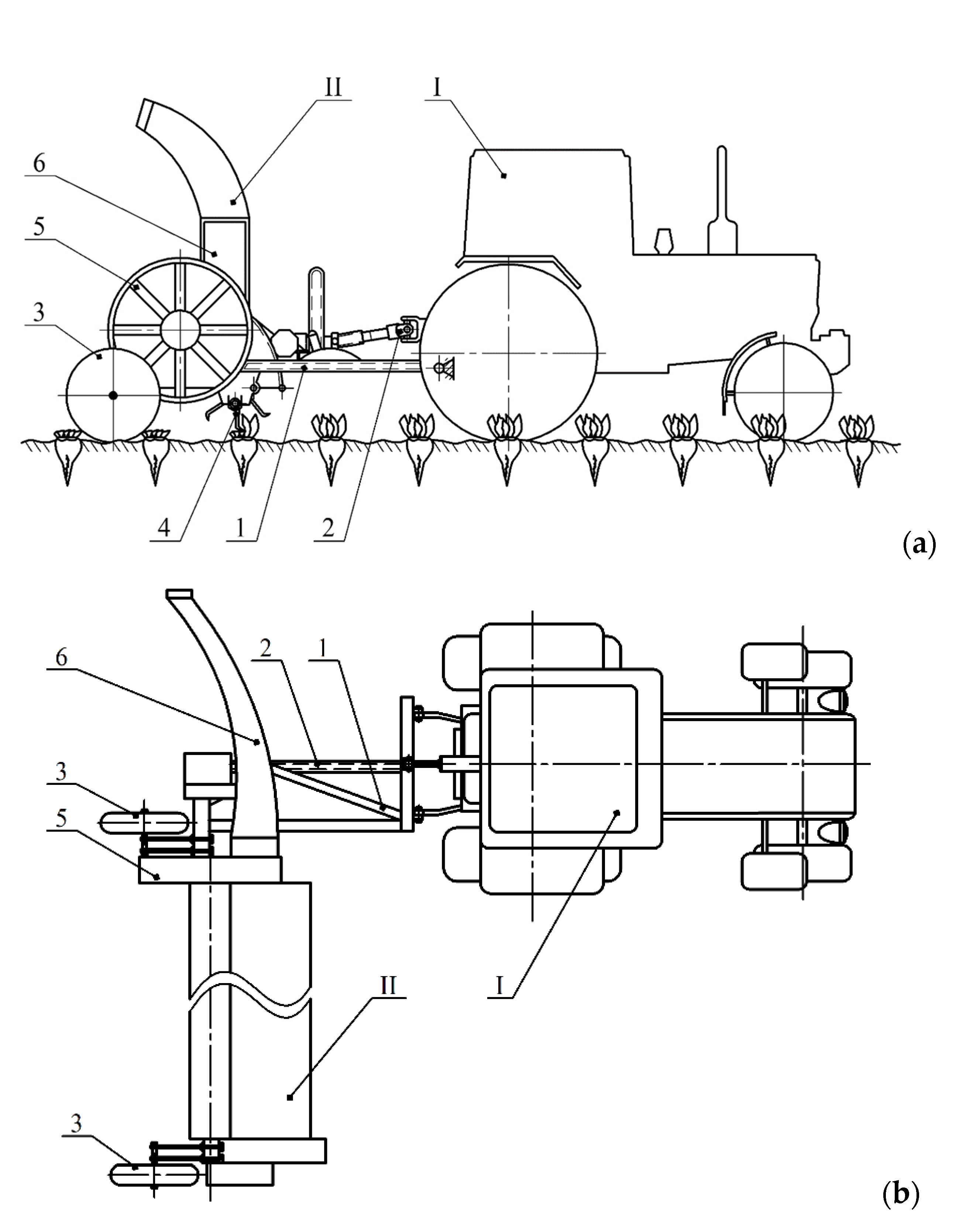
We have developed a new haulm harvester that performs solid cutting of the main mass of the green haulm from sugar beet root crops (or forage) with a rotary haulm harvester, which can be attached behind a wheeled tractor that is aggregating. Thus, the aggregating wheeled tractor moves on the harvested area of the field, and the rear trailed topper cuts the green mass of the tops from the rows of beet crops.
The cut mass is either distributed on the harvested area of the field or loaded into the body of a vehicle moving next to the working harvesting machine. A diagram of such a unit is shown in
Figure 1.
The construction of this harvester, regardless of the number of rows of sugar or fodder beetroot crops, includes two supporting, copying wheels, which move in between the rows and have mechanisms to set the height of the green mass haulm to be cut. We have developed the basic provisions of the theory of plane-parallel motion of asymmetric haulm harvester machine-tractor unit consisting of a wheel tractor of nominal traction force 14 kN and a rear trailed haulm harvester of our construction.
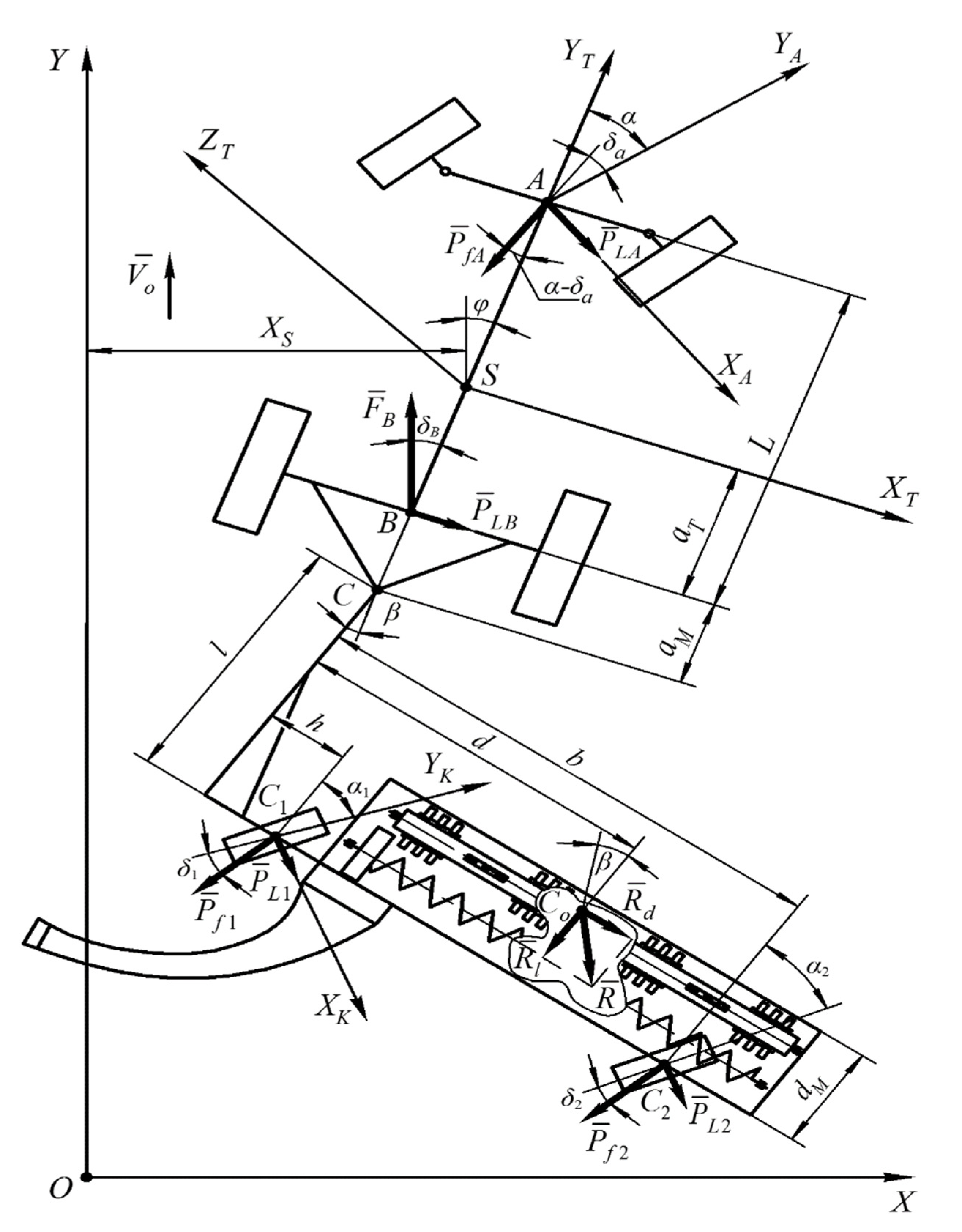
First, an equivalent diagram of such a machine-tractor unit was built, shown in
Figure 2. It shows a wheeled tractor in an arbitrary position, with a harvester machine attached to the rear implement in a certain row.
In addition, during the theoretical study of the mentioned unit motion, some of its properties were formalized, and appropriate assumptions were made. These assumptions in no way distorted the real process but greatly simplified the analytical research. Thus, the main assumptions were as follows:
The surface of the field over which this harvesting machine is moving is horizontal, and therefore the roll and trim of this machine have been rejected;
The wheeled aggregating tractor was represented as a solid body with a longitudinal plane of symmetry passing through its mass center;
Fluctuations of traction resistance of the trailed haulm harvester do not significantly affect the machine’s forward speed, so in the first approximation, they had constant values;
Interaction of pneumatic tires of driving wheels of the aggregating tractor and supporting copying wheels of the trailed mower harvester with the soil surface, especially in the lateral directions, fully met the hypothesis of “lateral input” of pneumatic wheel tires;
Since the gyroscopic and stabilizing moments of the pneumatic tires of the aggregating tractor and the supporting copying wheels of the harvester are small, as well as the moments of their twisting relative to the vertical axes, they were not taken into account during the movement of this unit;
The entry angles of the pneumatic tires of the running wheels of the aggregating tractor, which are located on the same geometrical axis and the lateral forces acting on them, were considered small enough;
The turning angles of the left and right steering wheels of the aggregating tractor were also considered small and equal to each other since the main movement of the machine when performing the technological process of harvesting sugar beet tops is rectilinear.
The equivalent diagram shows the characteristic points, the applied external forces on the links of the machine and tractor unit, the adopted systems of stationary and moving coordinates, and also shows the specified linear and angular dimensions.
Taking into account the accepted assumptions, as well as based on the analysis of the types of motions of the given harvester machine and tractor unit, the generalized coordinates (
) were taken and based on the initial equations of motion in the Lagrange form of the second kind the system of the second-order linear differential equations describing the motion of the asymmetric machine and tractor unit in the horizontal plane was obtained as follows:
where
;
In this system of differential Equation (1), the following designations were used: MT and JS—the mass of the wheeled aggregate tractor and its moment of inertia relative to the center of mass (point S); Vo—velocity of the harvester machine and tractor unit movement; , —resistance coefficients of pneumatic tires of the tractor front and rear axles, respectively; JC —the moment of inertia of the haulm harvester along the vertical axis passing through the point (i.e., the pivot point of the trailed haulm harvester and the coupling tractor); , —resistance coefficients of pneumatic tire input in accordance with the left and two right copying wheels of the trailed haulm harvester; , —angles of installation (discrepancies) of the left and right wheels of the haulm harvester; L—tractor base; aT—longitudinal coordinate of the tractor’s center mass; aM—distance from the tractor’s rear axle to the point of the harvester attachment; l—length of the harvester hook-on hitch; h, —placement coordinates of the left and right harvester wheels; b—placement coordinates of the harvester center resistance; and dM—haulm harvester machine width.
2.2. Method for Checking the Mathematical Model for the Adequacy
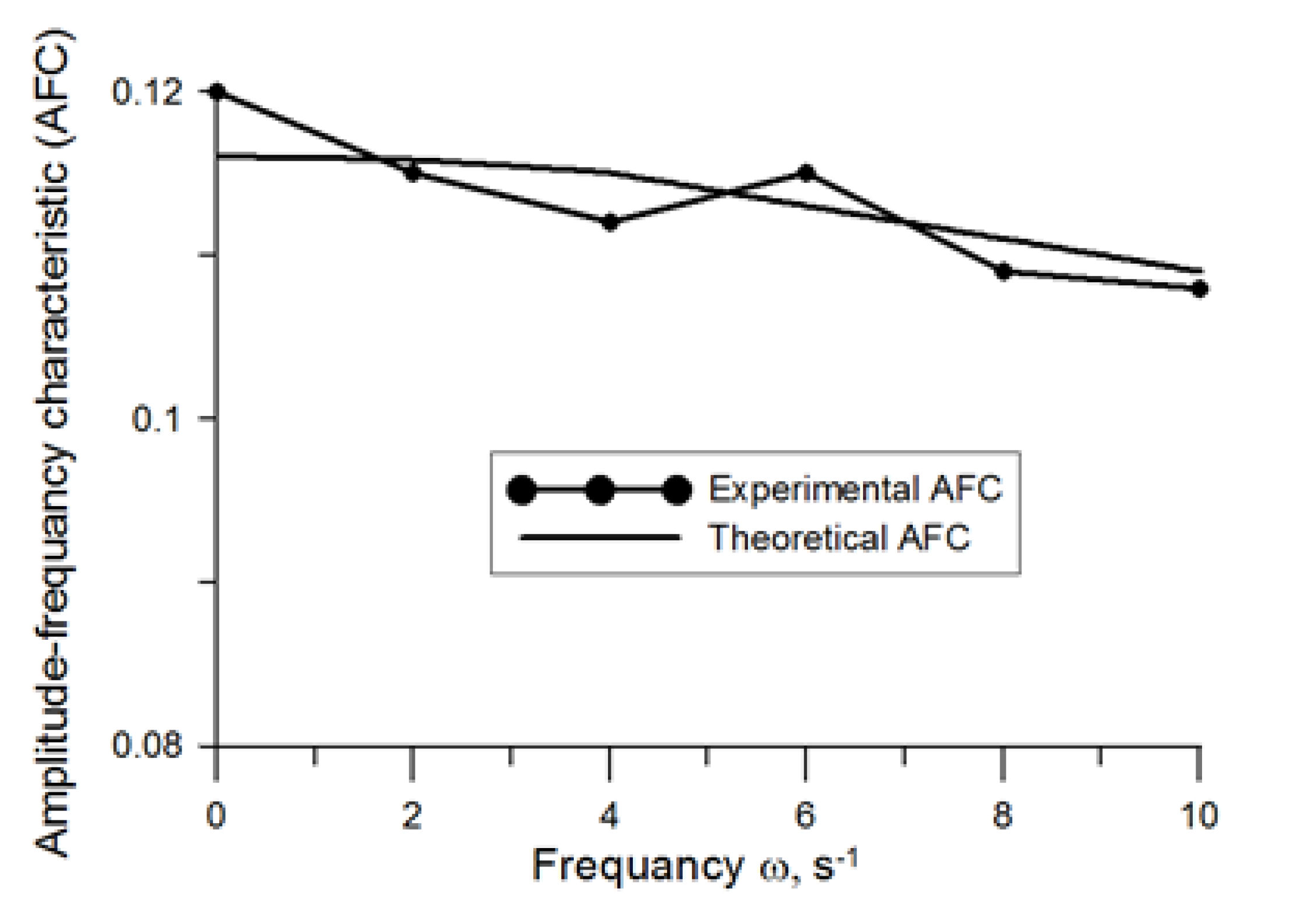
The verification of the mathematical model (1) for adequacy was carried out by comparing the theoretical () and experimental () amplitude-frequency characteristics of the dynamic system when it was working out the disturbing effect in the form of the harvester machine rotation angle β.
The experimental characteristic
was found from the equation:
where
are the standard deviations of the tractor’s yaw angle and the harvester’s rotation angle, respectively;
—normalized spectral densities of the parameters’
φ and
β oscillations, respectively.
The experimental field was divided into sites, each 250 m long. On the site, the harvesting unit moved in the direction “there” and “back” at a given speed. During the unit’s movement for at least 60 s, two parameters were recorded: the yaw angle φ of the tractor and the angle β of the harvester rotation. For this, gyroscopes and accelerometers GY-521 based on MPU-6050 (InvenSence Inc., Sunnyvale, CA, USA) were used. The electrical signals received from them were recorded on a Laptop using an Arduino UNO (Roma, Italy). The calculation of Equation (2) parameters was carried out using the MathCad 15.
The theoretical amplitude-frequency characteristic of the harvesting unit was calculated using a mathematical model (1) and a transfer function (8).
For the numerical solution of the system of differential Equation (1), we will further use methods of operational calculus based on the Laplace transform [
7,
20,
21]. For this purpose, we will carry out the transition from the original functions to their reflections by introducing an operator of this form:
Using this operator allows us to go from a system of differential Equation (1) to a system of algebraic equations, which will look as follows:
where
|
l(s)—single step change of input parameter.
|
Thus, the system of Equation (3) is a computational mathematical model of the asymmetric machine-tractor harvester in operator’s form, which we will use in the following to study the stability of its motion. The input variables in the system of Equation (3) are the steering action in the form of the steering angle of the tractor wheels and the unit step effect of each disturbing moment, which are components of the total coefficient . Since a change in each of the components of this coefficient leads to a change in the value of the disturbing moments, they can all act as a single-step impact. The output parameters of this dynamic system are the transverse displacement of the center of mass and the course angle of the tractor and the rotation angle of the trailed asymmetric harvester in the horizontal plane of projections.
From the system of Equation (3), it is easy to obtain a mathematical model of the movement of a different kind of unit, provided that the rotation angle
of the trailed mulcher has a perturbing effect. Then we get:
With the help of model (4), you can trace the effect of changes in the rotation angle of the trailed harvester on the fluctuations of the course angle of the wheeled tractor.
To calculate the corresponding amplitude-frequency and phase-frequency characteristics characterizing the effect of angle
changes on the oscillations of the tractor course angle
a transfer function should be composed of the following form:
where
Substituting in the determinants
D0 and
D3 in expressions (6) and (7), values of the coefficients
Kij from the system of Equation (3), after appropriate transformations, we obtain an expression for calculating the necessary transfer function in the following form:
where
;
Based on the transfer function
W0(
s) obtained by the method outlined in the work of [
21], it is possible to calculate the amplitude-frequency and phase-frequency characteristics of the asymmetric tractor unit during the development of its disturbing influences. We have carefully considered the influence of the rotation angle
of the trailed haulm harvester on the oscillation of the course angle
of the tractor. It is known [
15] that the amplitude-frequency response should be as small as possible when the dynamic system works out any perturbation. Ideally, it should be equal to zero. At the same time, the phase-frequency shift (i.e., the delay in the response of the dynamic system to the disturbing influence) should be as large as possible. As a result, when the dynamic system is working out the perturbation, the desired amplitude-frequency characteristics should be equal to 0. The phase-frequency characteristics, on the contrary, should tend to infinity.
Those parameters and operating modes of the investigated asymmetric harvester machine-tractor unit, which, in the operating frequency range of oscillations of controlling and disturbing input influence maximally approximate the actual amplitude-frequency and phase-frequency characteristics to the desired ones, will thus be considered optimal. The construction parameters of this asymmetric toothed machine-tractor unit required calculating the theoretical amplitude and phase-frequency characteristics as follows:
= 4250 kg, = 4.6 kN∙m∙s2, = 7.3 kN, = 1.7 kN, = 2.45 m, = 0.98 m, = 1.20 m, = 80 kN∙rad−1, = 120 kN∙rad−1, = 9.55 kN.
3. Results and Discussion
When comparing the theoretical and experimental amplitude-frequency characteristics (AFC), it was found that in the entire frequency range of the angle
β, the maximum difference between the calculated and experimental data does not exceed 4% (
Figure 3).
This result indicates that the developed mathematical model (1) of the harvesting unit movement in the horizontal plane is adequate, and the results of theoretical calculations using it can be considered quite reliable.
After compiling the program of numerical calculations and solving the obtained mathematical model on the PC, we plotted the amplitude-frequency and phase-frequency characteristics that allow for evaluating the stability of the motion of this asymmetric machine-tractor harvester (
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
Figure 7). Based on the obtained graphical dependencies, let us analyze how some construction and technological factors of the given haulm harvester affect the amplitude and phase-frequency characteristics of oscillations of the course angle
of the wheeled aggregate tractor when changing the oscillation frequency of the angle
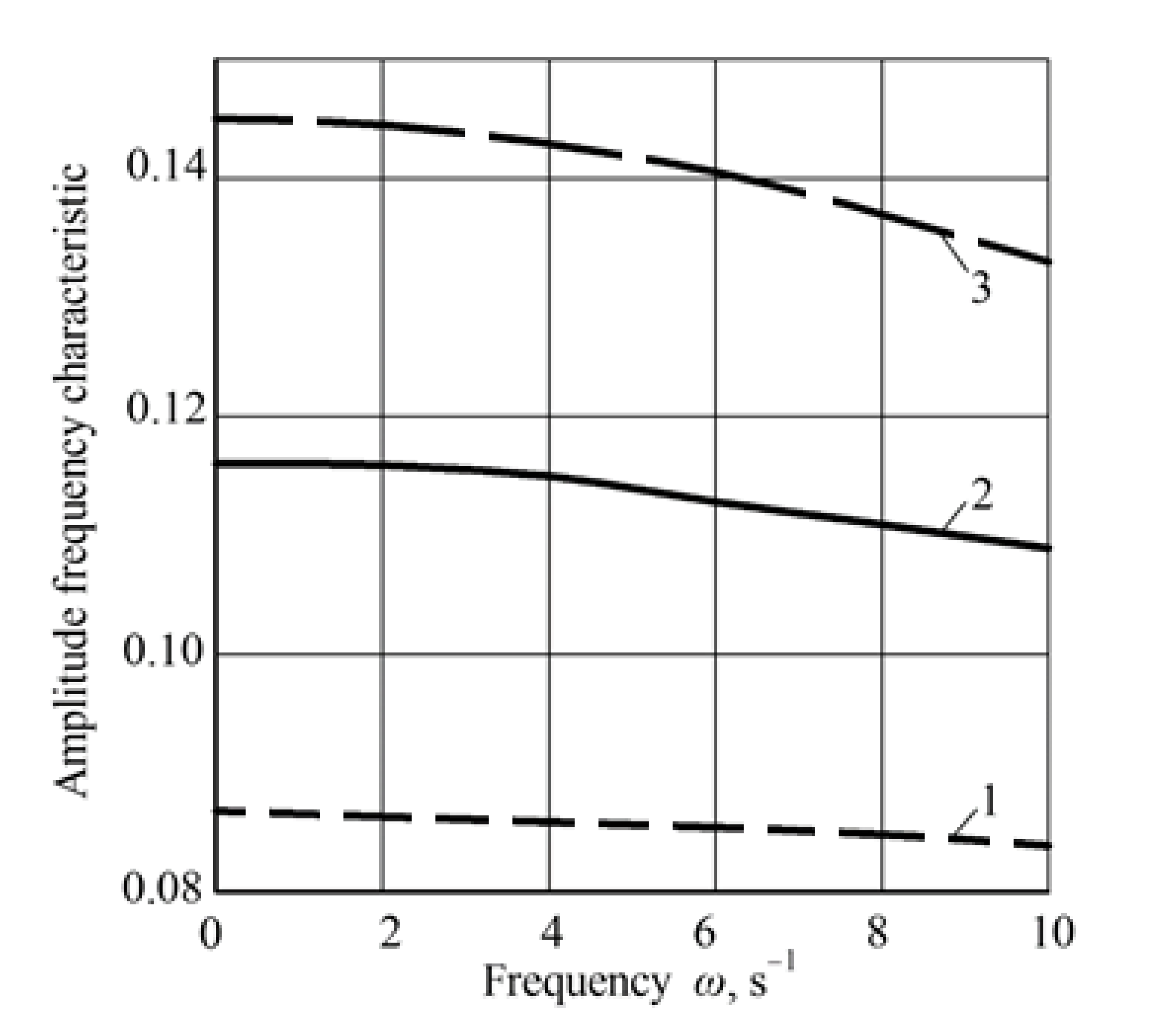
of the trailed haulm harvester in the horizontal plane. First, let us consider the effect of the forward speed
Vo of a given harvesting machine. The analysis of the obtained amplitude-frequency characteristics testifies to the following. First, as the frequency of the disturbing oscillations (i.e., angle
) increases, the amplification factor of the considered dynamic system of this input impact at each speed mode of the harvesting machine motion gradually decreases (
Figure 4).
There is every reason to believe that this result is logical since the greater the frequency of oscillations of perturbation
ω, the greater the stabilizing role played by the inertial properties of the dynamic system, which is considered. Secondly, increasing the speed
Vo of the machine-tractor unit movement becomes more sensitive to disturbing influences. For example, at the angle
oscillation frequency
ω = 4 s
−1 and the speed of the machine 1.5 m∙s
−1, its amplitude-frequency characteristic is 0.09 (curve 1,
Figure 4). In simplified form for understanding, this means that for the amplitude of oscillations of the disturbance (angle
) at 5° (and this is appreciable), the amplitude of oscillations of the course angle
φ of the aggregating wheeled tractor is only 0.45°, which is almost imperceptible.
When the speed
Vo of motion of the haulm, the harvester is 2.5 m∙s
−1, and with the same perturbation frequency
ω = 4 s
−1, the amplitude-frequency response of the dynamic system increases to 0.14 (curve 3,
Figure 4). Compared with the previous velocity mode (when the amplitude-frequency response is equal to 0.09), this is almost 1.6 times greater. However, according to the same amplitude of fluctuations of the angle
β = 5°, the amplitude of fluctuations of the course angle
φ of the aggregate tractor does not exceed 0.7°. As we can see, in qualitative terms, the increase in the velocity
Vo of the haulm harvester, considered, leads to an undesirable increase in the amplitude-frequency response when reproducing the external disturbing influence in the form of oscillations of the angle
β of rotation of the haulm harvester. In quantitative terms, this influence is such that it cannot worsen the practical stability of the movement of a given asymmetric machine-tractor harvester.
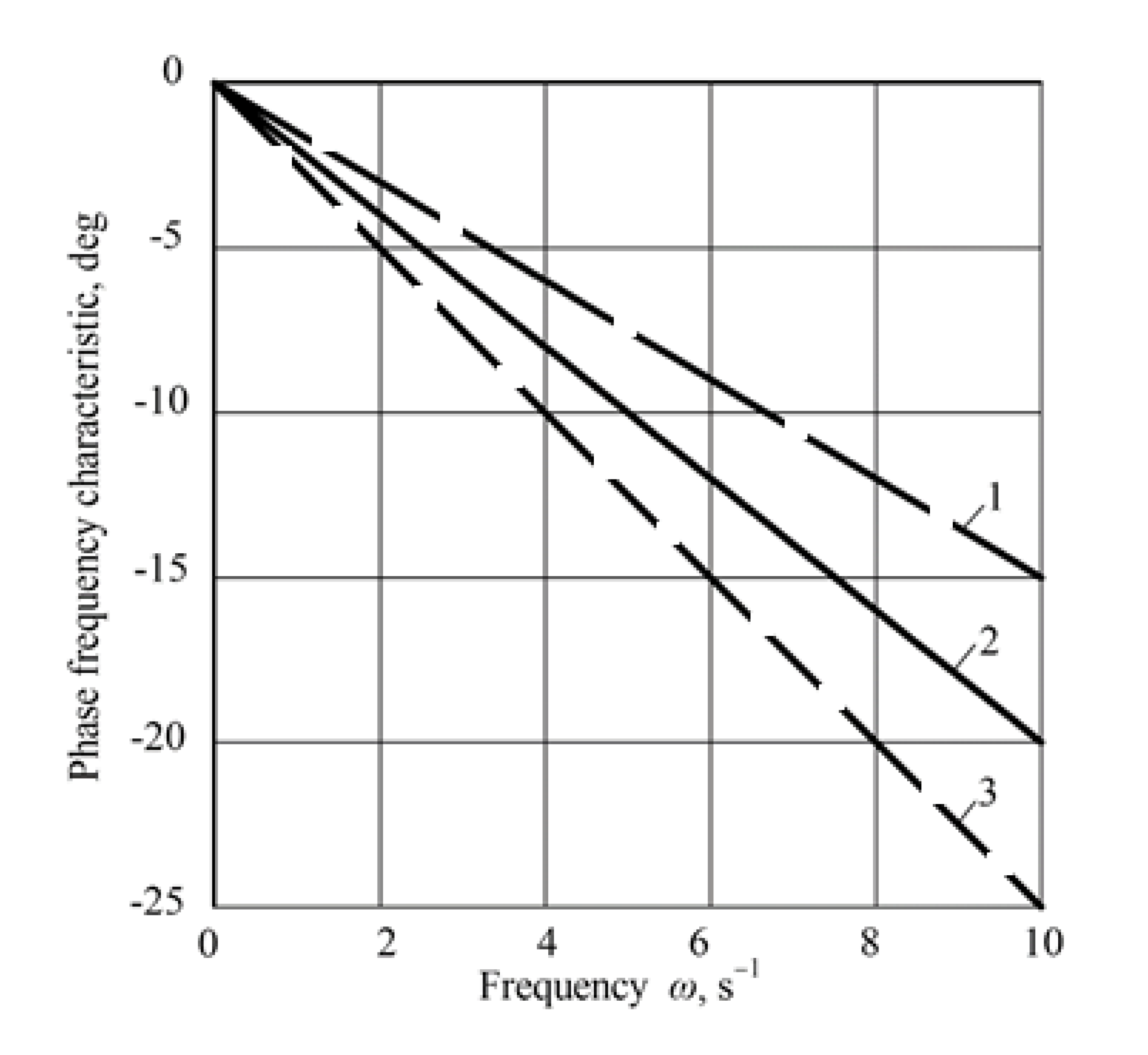
Now, what concerns the delayed response of the considered dynamic system to perturbing influences. Under the condition of increasing its frequency, the phase-frequency characteristic at each speed mode of motion of the given harvester machine increases (
Figure 5).
The greater the value of the oscillation frequency
ω, the more influential the inertial properties of this machine, and the greater is its delay (in this case, the phase shift) to the action of disturbing influences. The same inertial properties of the machine-tractor unit cause the fact that the time of its response to perturbations increases with the increase in the velocity
Vo. So, if at a speed of forwarding movement equal to
Vo = 1.5 m∙s
−1 and
ω = 10 s
−1, the phase shift of the given dynamic system (i.e., phase-frequency characteristic) makes −15° (curve 1,
Figure 5), then already at an increase in the speed up to
Vo = 2.5 m∙s
−1 and at the same frequency
ω this parameter increases to a mark −25° (curve 3,
Figure 5). The phase shift difference, in this case, is 10° or 0.17 rad.
Next, let us estimate more carefully the value of the specified indicator. At speed Vo of forwarding motion of the given harvester machine-tractor unit at a level of 2.5 m∙s−1 and frequency of oscillations of disturbance ω = 10 s−1, it makes 0.017 s. The significance of such a result is noteworthy if it were not for the essential invariance of the aggregate to the amplitude of oscillations of external disturbing influences. As a result, as we can see, when changing the speed mode of this machine-tractor unit in the range of 1.5–2.5 m∙s−1, it reacts sensitively to fluctuations in the angle β of rotation of the harvester and satisfactorily reproduces changes in its amplitude.
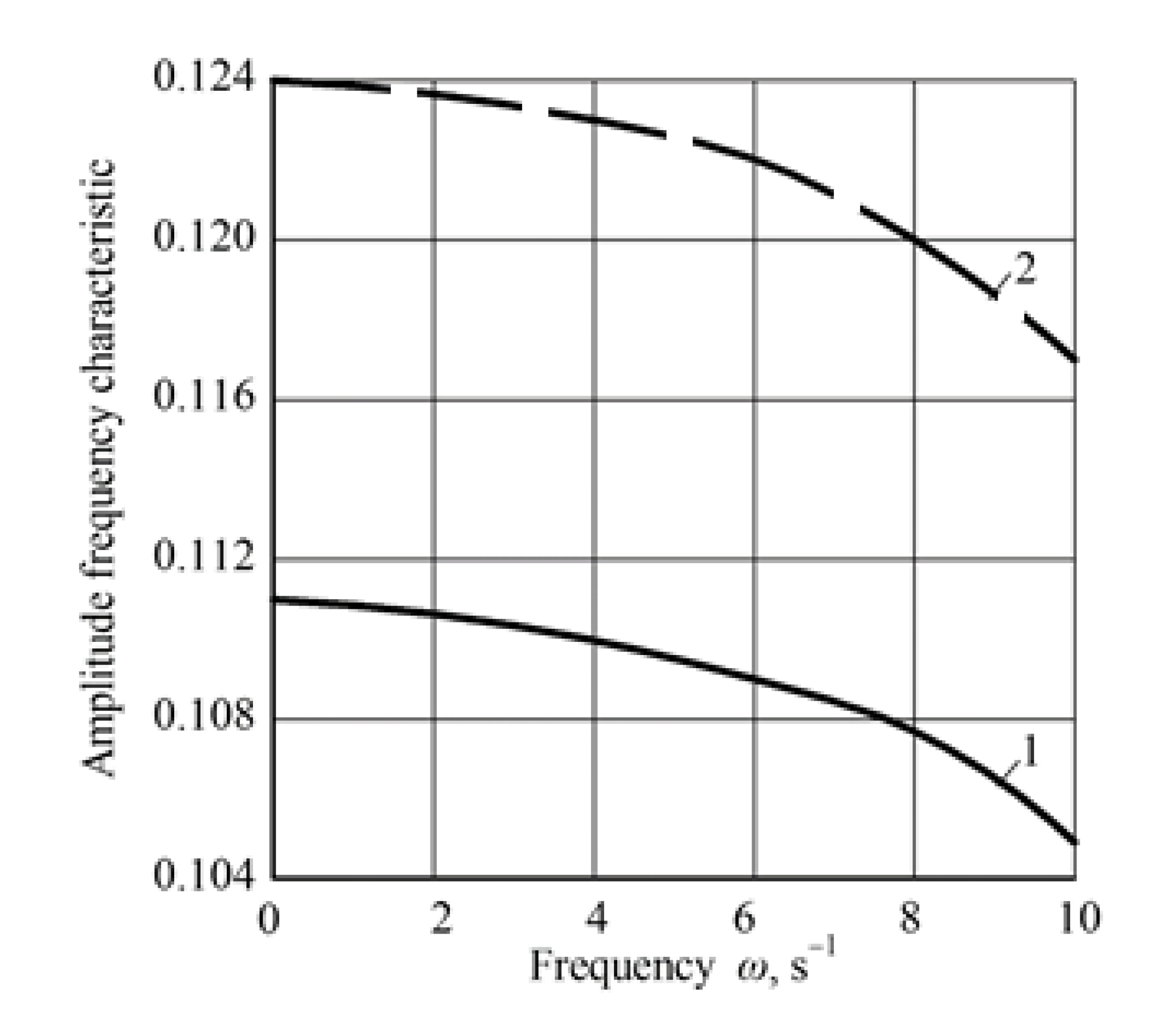
It should be separately emphasized that the character of stability of motion of this asymmetric machine-tractor unit when it reproduces external disturbances as a dynamic system significantly depends on the values of the input resistance coefficients of pneumatic tires of the wheeled aggregate tractor. In our case, these are the coefficients
and
. As the results of mathematical modeling show, the increase in the input resistance coefficient
of the front pneumatic tires of the aggregating tractor wheels lead to a decrease in the value of the corresponding amplitude-frequency response (
Figure 6).
In a range of frequency changes ω = 0–10 s−1, the specified increase on the average makes 11%. This result can be explained as follows. The greater the value of the coefficient (which can be achieved by a corresponding increase in the air pressure in the pneumatic tires of the wheels of the aggregating tractor), the greater the resistance of the wheel to disturbing influences. In this case, it is the turning moment due to the turning of the topper by an angle β. On the contrary, the lower the air pressure in pneumatic tires of the driving wheels, the lower the value of their input resistance coefficient , and the greater is the sensitivity of the wheel aggregate tractor to the action of disturbing influences in the form of turning moment. The result obtained should be taken into account when choosing the air pressure in the tractor tires since the value of this pressure determines the values of the coefficients and .
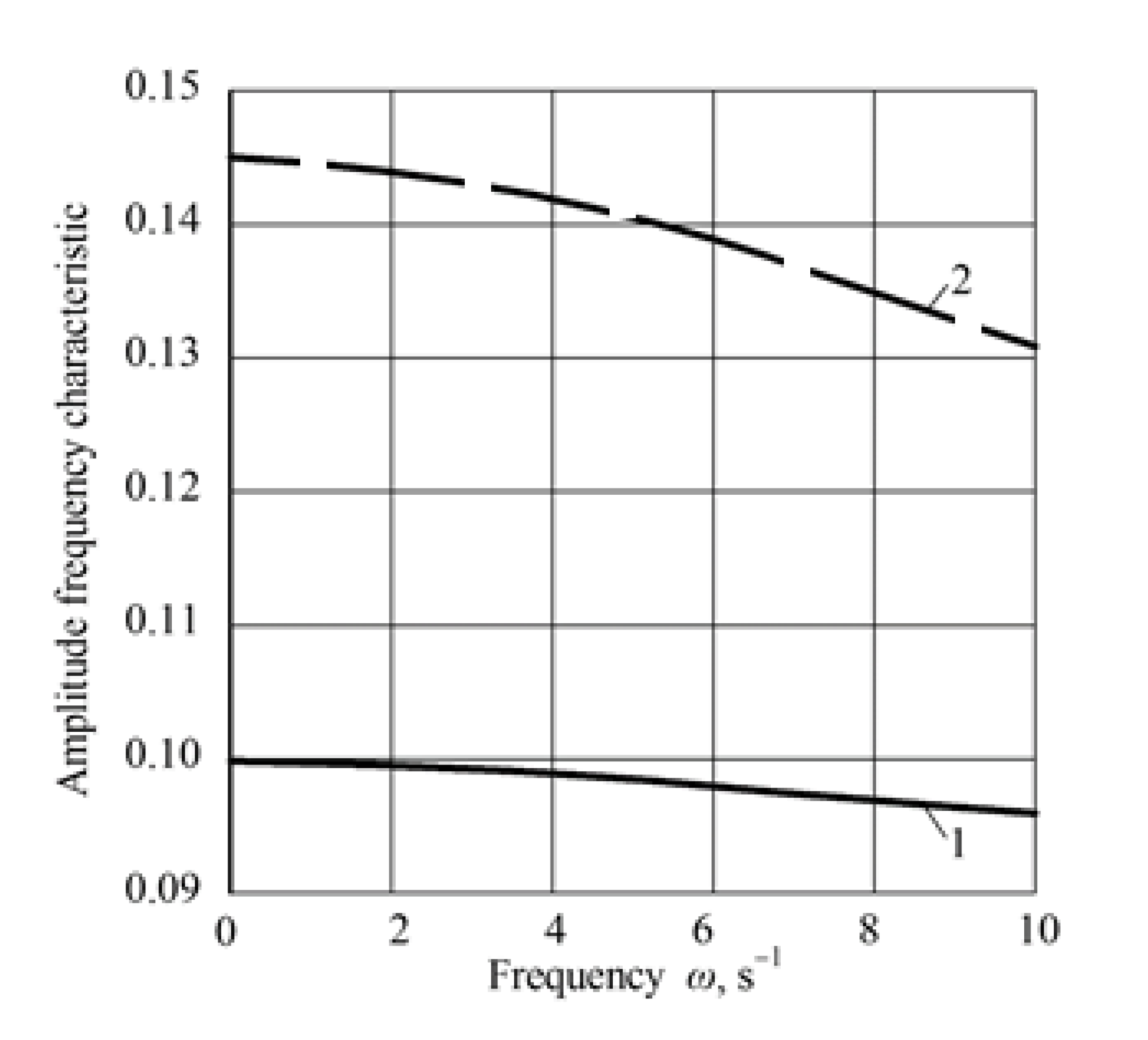
The qualitatively similar situation is associated with the change in the coefficient
of the resistance of the pneumatic tires input of the rear running wheels of the aggregating tractor (
Figure 7). The difference is that the rear wheels of the aggregating tractor are closer to the attachment point of the trailed harvester to the tractor than the front ones.
As a result, they are quicker and more sensitive to disturbing influences due to fluctuations in the angle
β we consider. Based on the numerical calculations obtained on the PC, we will make a more thorough analysis of the obtained result and compare at the same value of the frequency of vibration of the disturbance
ω = 2 s
−1 two amplitude-frequency characteristics of this harvester machine obtained for sufficiently close values of the input resistance coefficients
= 80 kN∙rad
−1 (
Figure 6) and
= 90 kN∙rad
−1 (
Figure 7).
So, in the first case (
Figure 6), the value of this characteristic almost reaches the mark 0.124. In the second case (
Figure 7), the value of the amplitude-frequency response is about 0.145, which is almost 17% more. Thus, it is evident that the smaller the value of the amplitude-frequency response of the machine-tractor unit when working out the disturbance, the higher the stability of its movement in the horizontal plane.
The above analytical studies were carried out on the assumption that the energy base of the machine-tractor unit under consideration is universal tillage wheeled tractor of traction force of 14 kN. As it is known, this tractor has the classical layout, according to which about 40% of its weight is on the front and the rest is on the back of the tractor.
The results of the conducted mathematical modeling show that in qualitative terms, an increase in the speed of a given asymmetric machine-tractor unit from 1.5 to 2.5 m∙s−1 leads to an undesirable increase in the amplitude-frequency response and desired increase in the phase-frequency response when they play an external disturbance in the form of oscillations of the rotation angle β of the rear-mounted harvester.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






