
Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel


Abstract
:1. Introduction
2. 2D GPR Target and Serial Detection
2.1. 2D GPR Target
2.2. Proposed Serial Detection
3. Proposed Model
4. Simulation Results
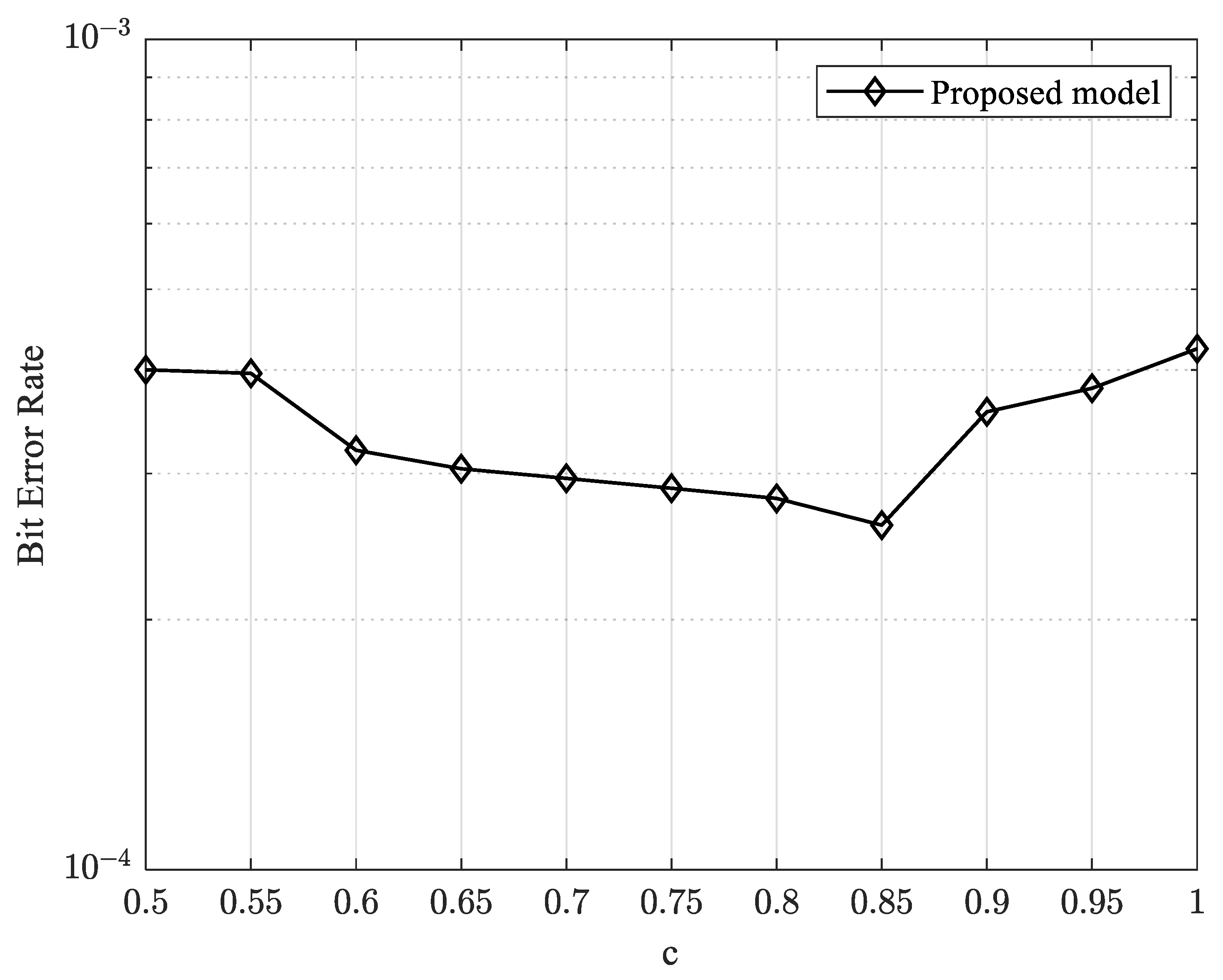
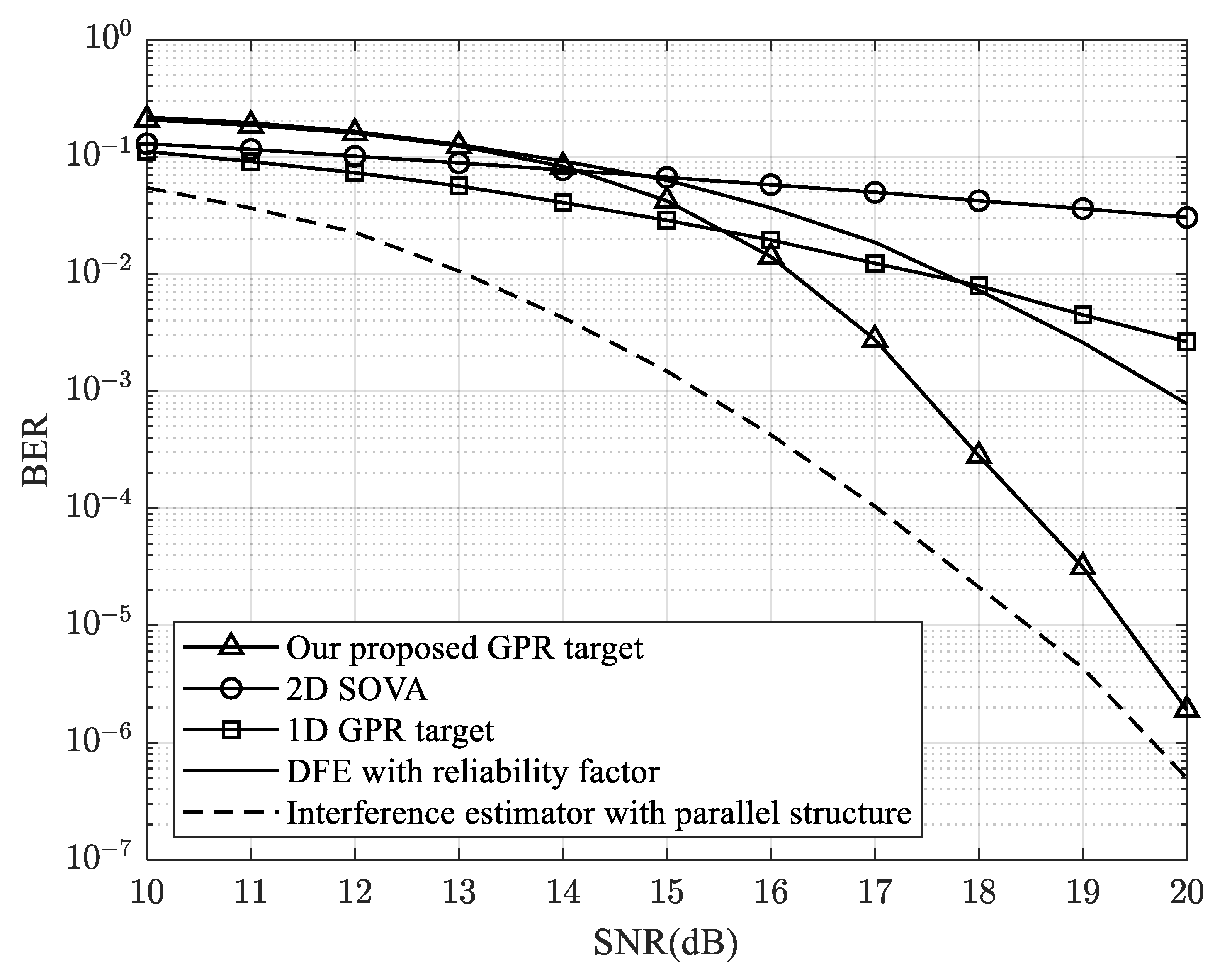
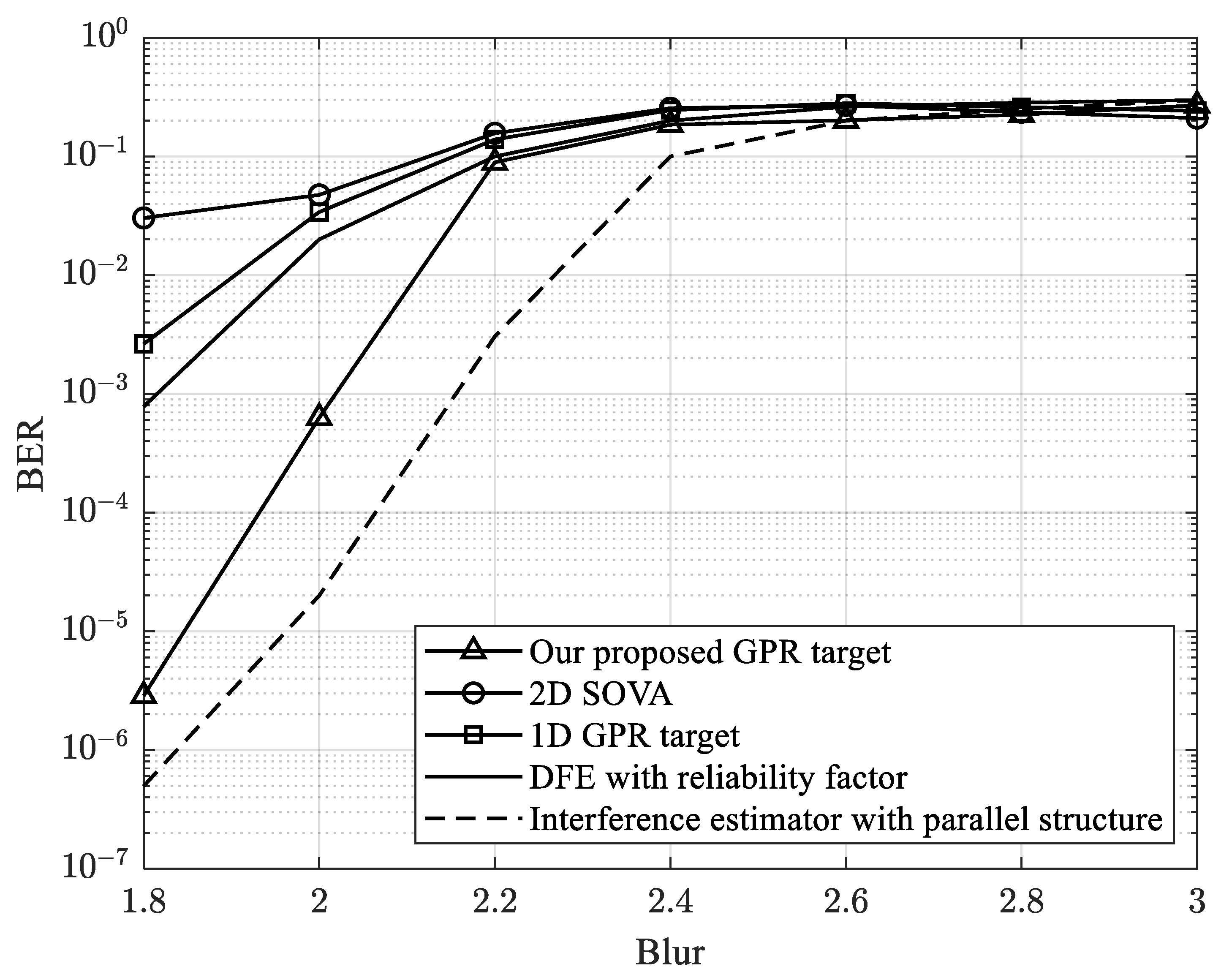
4.1. Results of Proposed Model
4.2. Complexity of Proposed Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Asai, S. Semiconductor memory trends. Proc. IEEE 1986, 74, 1623–1635. [Google Scholar] [CrossRef]
- Miura, Y. Hard disk drive technology: Past, present and future. In Proceedings of the Digest of the Asia-Pacific Magnetic Recording Conference 2002, Singapore, 27–29 August 2002. [Google Scholar]
- Hesselink, L.; Orlov, S.S.; Bashaw, M.C. Holographic data storage systems. Proc. IEEE 2004, 92, 1231–1280. [Google Scholar] [CrossRef] [Green Version]
- Burr, G.W.; Mok, F.H.; Psaltis, D. Angle and space multiplexed holographic storage using the 90° geometry. Opt. Commun. 1995, 117, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Yu, F.T.; Wu, S.; Mayers, A.W.; Rajan, S. Wavelength multiplexed reflection matched spatial filters using LiNbO3. Opt. Commun. 1991, 81, 343–347. [Google Scholar] [CrossRef]
- Rakuljic, G.A.; Leyva, V.; Yariv, A.; Yeh, P.; Gu, C. Optical data storage by using orthogonal wavelength-multiplexed volume holograms. Opt. Lett. 1992, 17, 1471–1473. [Google Scholar] [CrossRef] [Green Version]
- Krile, T.F.; Hagler, M.O.; Redus, W.D.; Walkup, J.F. Multiplex holography with chirp-modulated binary phase-coded refer-ence-beam masks. Appl. Opt. 1979, 18, 52–56. [Google Scholar] [CrossRef]
- Ford, J.E.; Fainman, Y.; Lee, S.H. Array interconnection by phase-coded optical correlation. Opt. Lett. 1990, 15, 1088–1090. [Google Scholar] [CrossRef]
- Vadde, V.; Kumar, B.V.K.V. Channel modeling and estimation for intrapage equalization in pixel-matched volume holo-graphic data storage. Appl. Opt. 1999, 38, 4374–4386. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Two-Dimensional 5:8 Modulation Code for Holographic Data Storage. Jpn. J. Appl. Phys. 2009, 48, 03A031. [Google Scholar] [CrossRef]
- Wilson, W.Y.H.; Immink, K.A.S.; Xi, X.B.; Chong, T.C. Efficient coding technique for holographic storage using the method of guided scrambling. Proc. SPIE 2000, 4090, 191–196. [Google Scholar]
- Cideciyan, R.; Dolivo, F.; Hermann, R.; Hirt, W.; Schott, W. A PRML system for digital magnetic recording. IEEE J. Sel. Areas Commun. 1992, 10, 38–56. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Two-Dimensional SOVA and LDPC Codes for Holographic Data Storage System. IEEE Trans. Magn. 2009, 45, 2260–2263. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Iterative Two-Dimensional Soft Output Viterbi Algorithm for Patterned Media. IEEE Trans. Magn. 2011, 47, 594–597. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J. Iterative decoding of SOVA and LDPC product code for bit-patterned media recoding. AIP Adv. 2018, 8, 056503. [Google Scholar] [CrossRef] [Green Version]
- Nabavi, S.; Kumar, B.V.K.V. Two-dimensional generalized partial response equalizer for bit-patterned media. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 6249–6254. [Google Scholar] [CrossRef]
- Wang, Y.; Kumar, B.V.K.V. Improved Multitrack Detection With Hybrid 2-D Equalizer and Modified Viterbi Detector. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. One-Dimensional Serial Detection Using New Two-Dimensional Partial Response Target Modeling for Bit-Patterned Media Recording. IEEE Magn. Lett. 2020, 11, 1–5. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems. Appl. Sci. 2021, 11, 728. [Google Scholar] [CrossRef]
- Nguyen, T.; Lee, J. Serial Detection with Neural Network-Based Noise Prediction for Bit-Patterned Media Recording Systems. Appl. Sci. 2021, 11, 4387. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Effective Generalized Partial Response Target and Serial Detector for Two-Dimensional Bit-Patterned Media Recording Channel Including Track Mis-Registration. Appl. Sci. 2020, 10, 5738. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Two-Dimensional Interference Estimator with Parallel Structure for Holographic Data Storage Channel. Appl. Sci. 2022, 12, 2112. [Google Scholar] [CrossRef]
- Kim, K.; Kim, S.H.; Koo, G.; Seo, M.S.; Kim, S.W. Decision feedback equalizer for holographic data storage. Appl. Opt. 2018, 57, 4056–4066. [Google Scholar] [CrossRef] [PubMed]
- Koo, K.; Kim, S.V.; Jeong, J.J.; Kim, S.W. Two-dimensional soft output viterbi algorithm with a variable reliability factor for holographic data storage. Jpn. J. Appl. Phys. 2013, 52, 09LE03. [Google Scholar] [CrossRef]
- Koo, K.; Kim, S.-Y.; Jeong, J.J.; Kim, S.W. Data page reconstruction method based on two-dimensional soft output Viterbi algorithm with self reference for holographic data storage. Opt. Rev. 2014, 21, 591–596. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | G | v | b |
|---|---|---|---|
| 10 dB | |||
| 11 dB | |||
| 12 dB |
| SNR | G | v | b |
|---|---|---|---|
| 10 dB | |||
| 11 dB | |||
| 12 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.A.; Lee, J. Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel. Appl. Sci. 2022, 12, 4070. https://doi.org/10.3390/app12084070
Nguyen TA, Lee J. Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel. Applied Sciences. 2022; 12(8):4070. https://doi.org/10.3390/app12084070
Chicago/Turabian StyleNguyen, Thien An, and Jaejin Lee. 2022. "Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel" Applied Sciences 12, no. 8: 4070. https://doi.org/10.3390/app12084070
APA StyleNguyen, T. A., & Lee, J. (2022). Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel. Applied Sciences, 12(8), 4070. https://doi.org/10.3390/app12084070