
Solving Inverse Problems of Stationary Convection–Diffusion Equation Using the Radial Basis Function Method with Polyharmonic Polynomials




Abstract
:1. Introduction
2. The Governing Equation
3. The Radial Basis Function
4. Validation of the Proposed RBF
5. Numerical Examples
5.1. Example 1
5.2. Example 2
5.3. Example 3
6. Discussion
7. Conclusions
- (1)
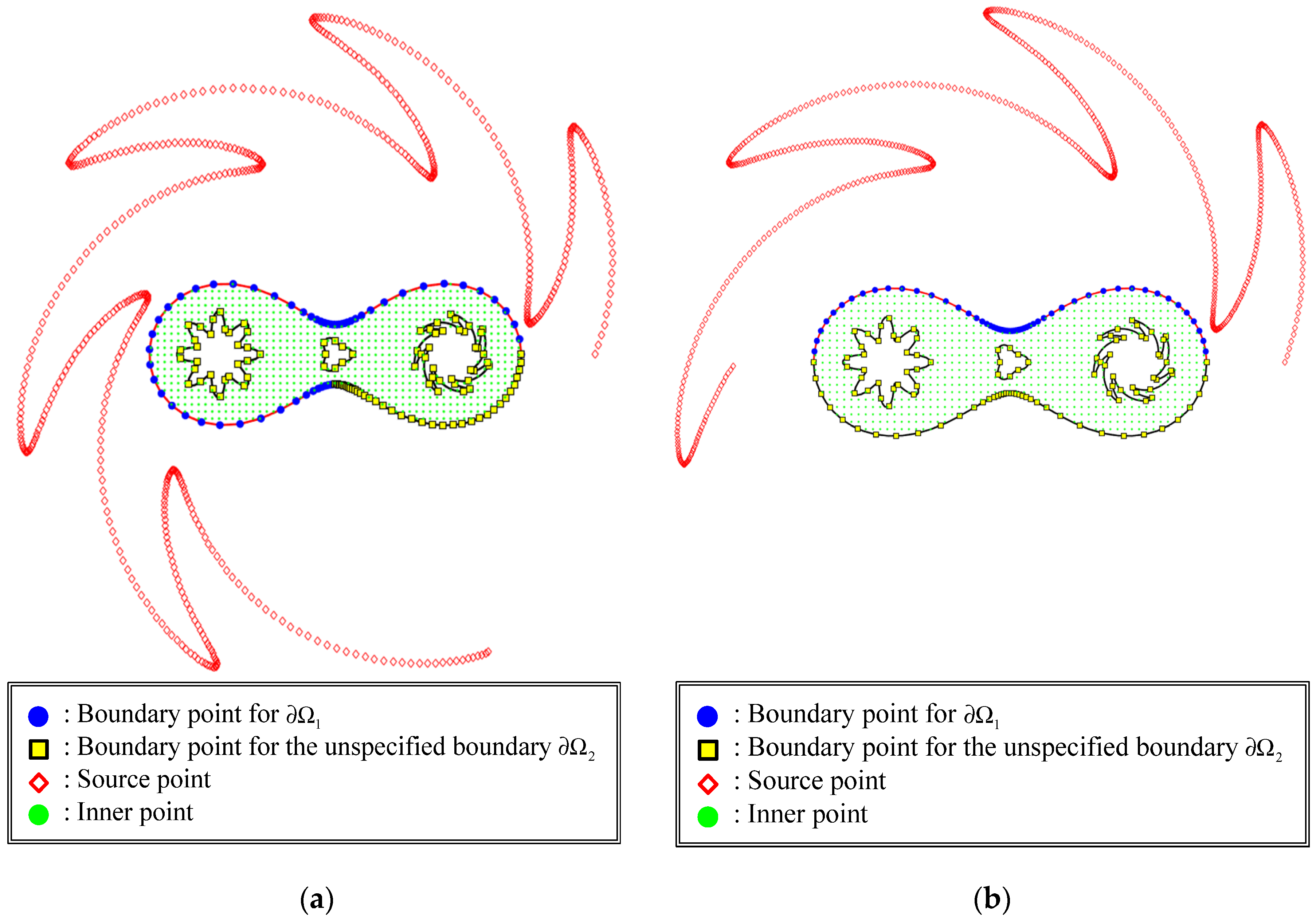
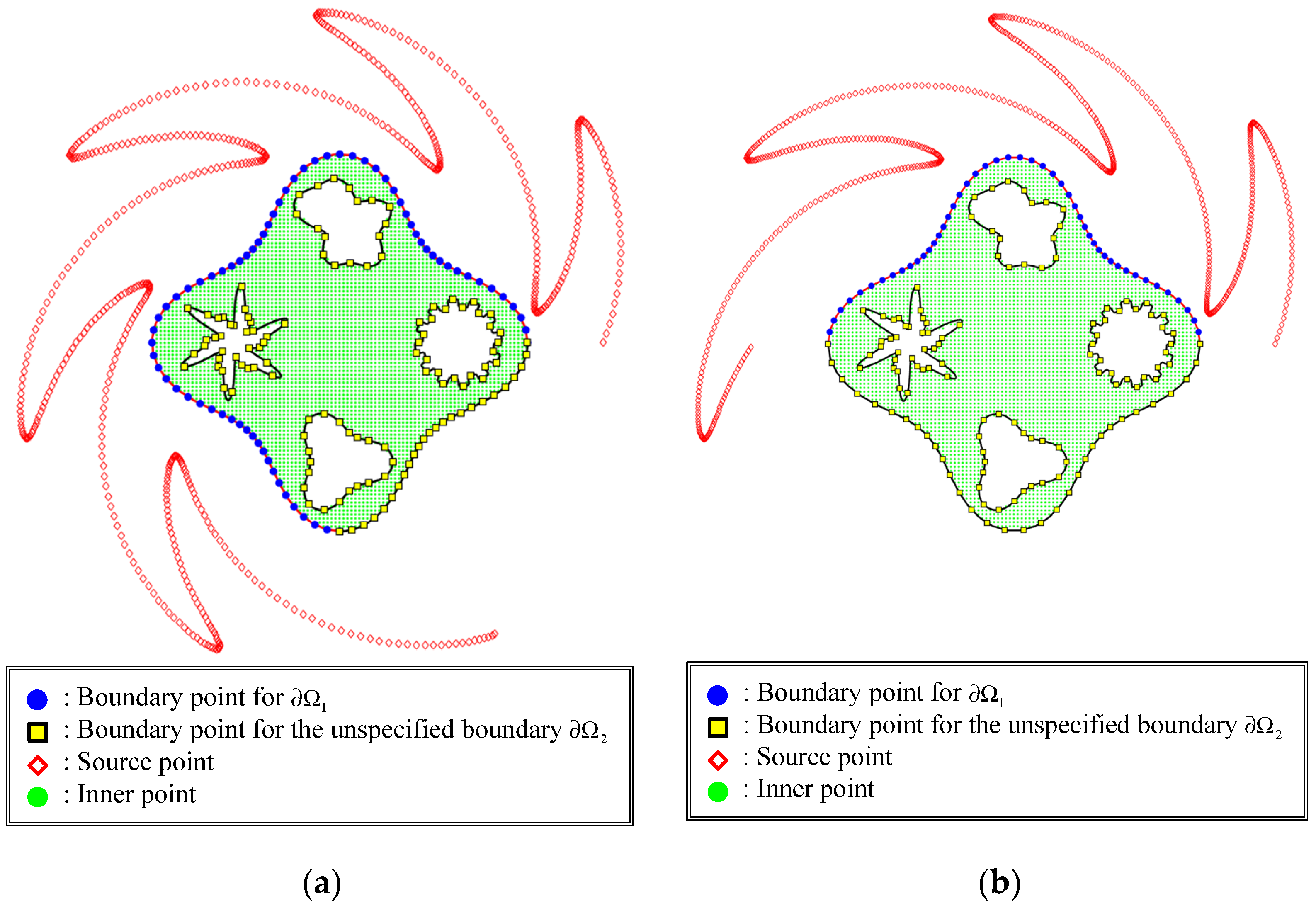
- In this study, we demonstrated that the radial basis function method with polyharmonic polynomials could achieve accurate results for inverse problems of the stationary convection–diffusion equation. Due to the meshless nature, the proposed RBF method is superior to solving the inverse problems in groundwater pollution problems with highly complicated domains such as the multiply-connected domains containing a finite number of cavities;
- (2)
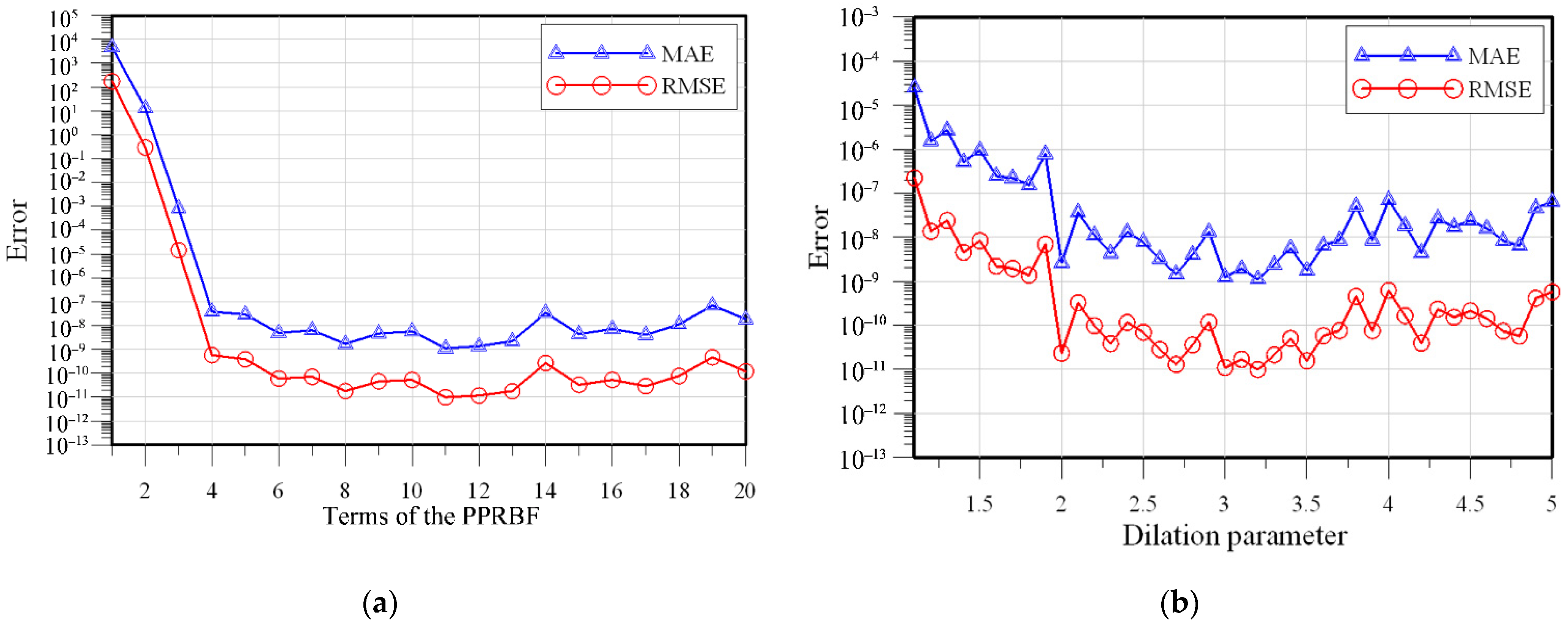
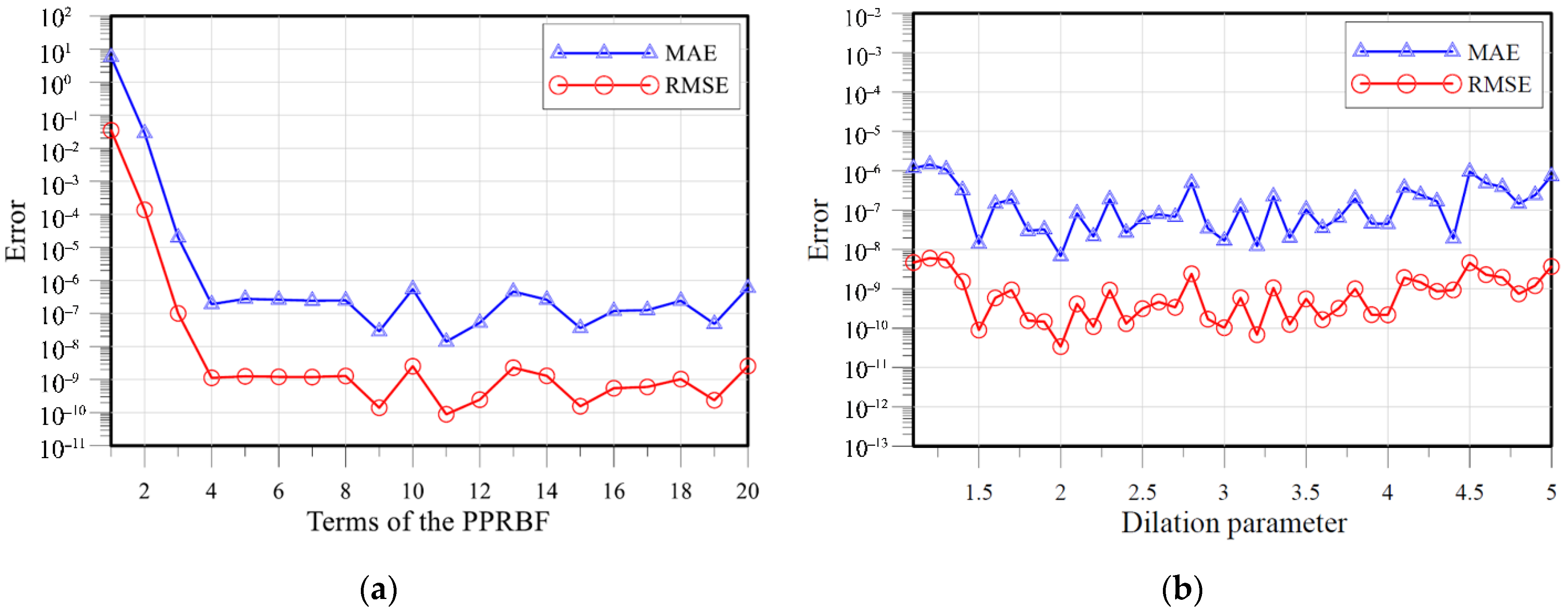
- The polyharmonic RBFs with a certain order are often used for function approximation. Because the order of the conventional polyharmonic RBF is fixed and needs to be given prior to the analysis, it is often challenging to determine the certain order of the polyharmonic RBF. In this study, we proposed polyharmonic polynomials (PPs). The PPs are a series of polyharmonic RBFs, including any order of the polyharmonic RBFs. Accordingly, the order of the polyharmonic RBF is not required to be given prior to the analysis;
- (3)
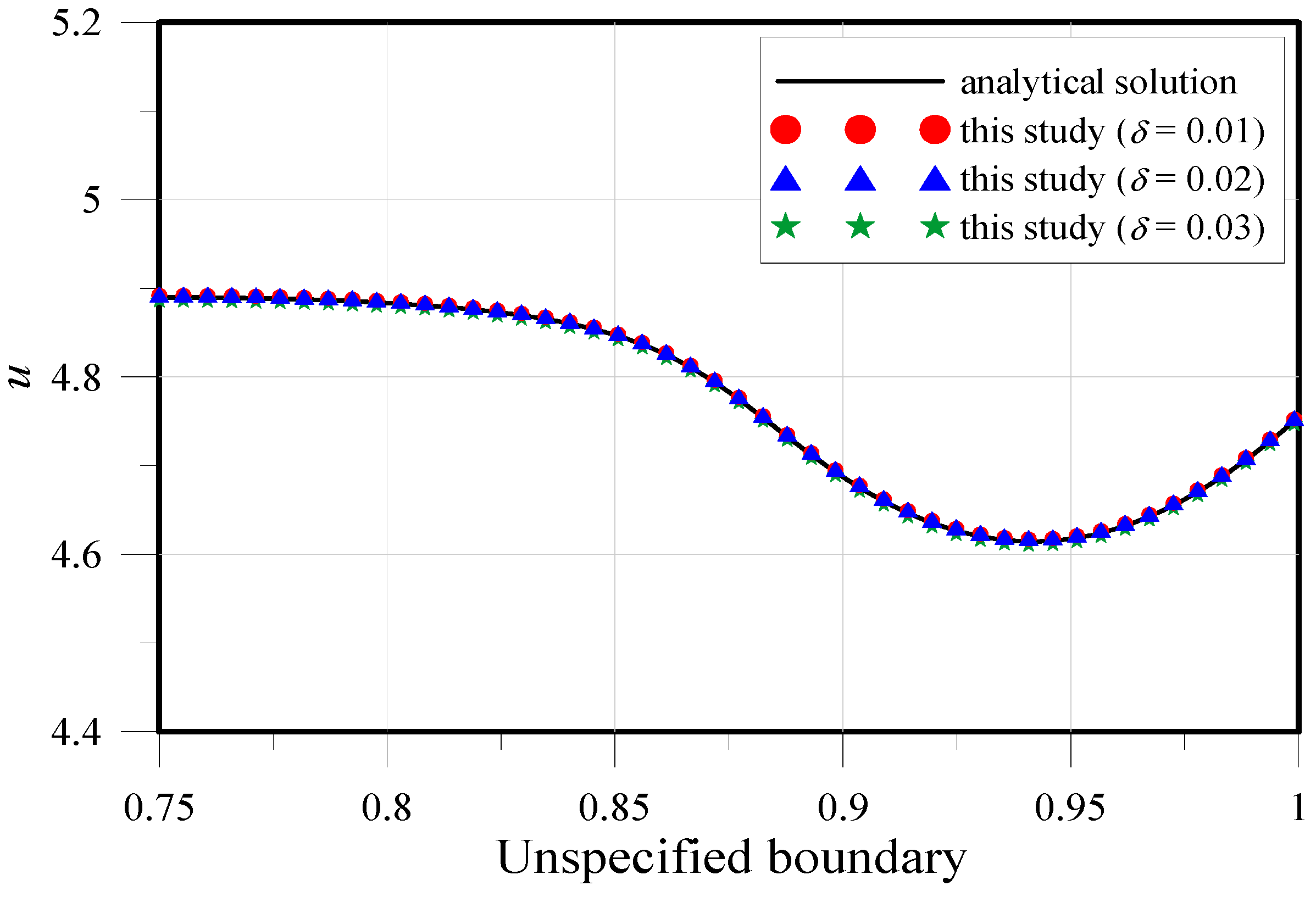
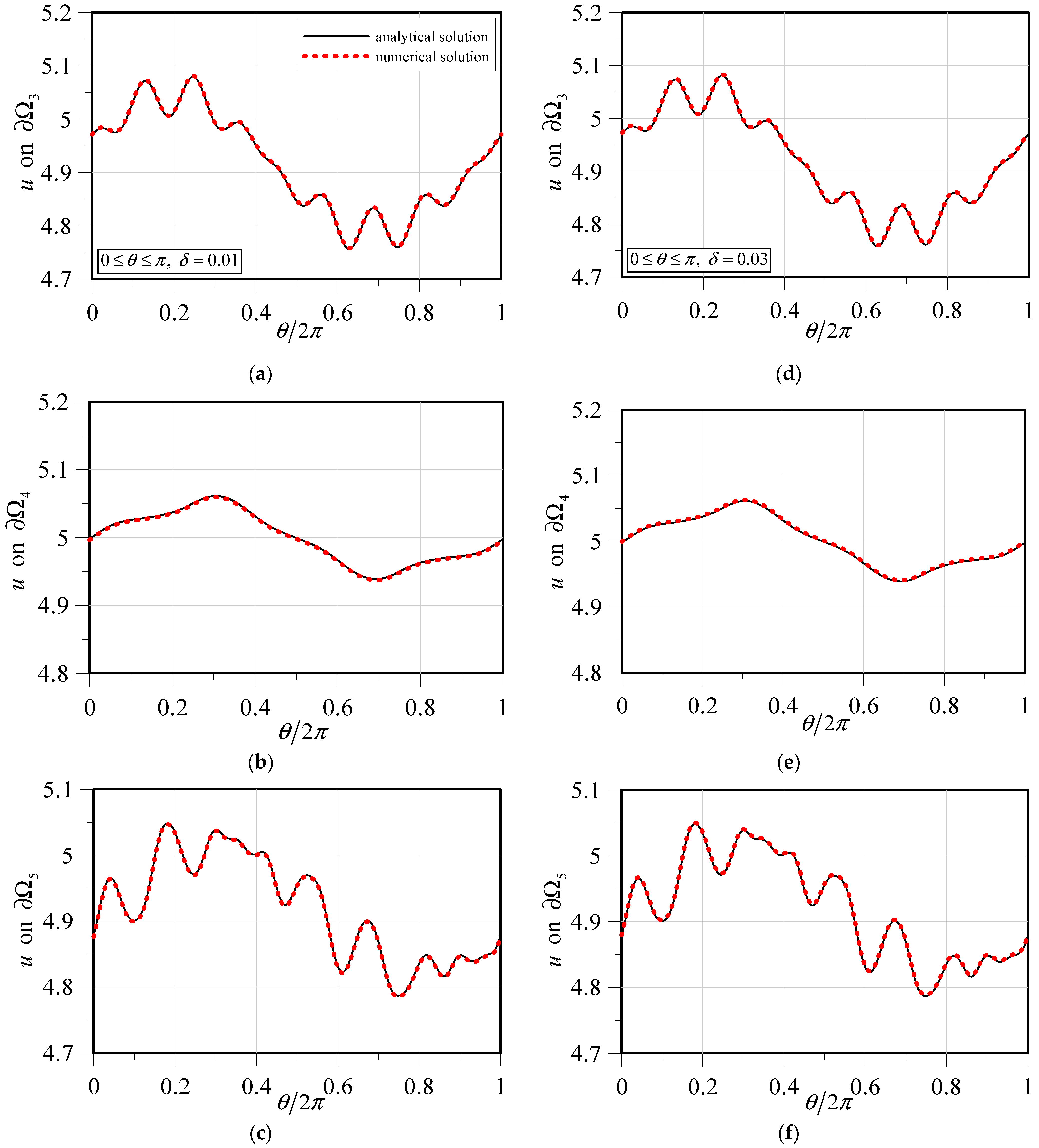
- Numerical examples in simply and multiply connected domains such as cavities with complicated shapes were carried out. We may recover the missing boundary observations such as concentration on the remaining boundary or those of the cavities with highly accurate results using more terms of the PPs;
- (4)
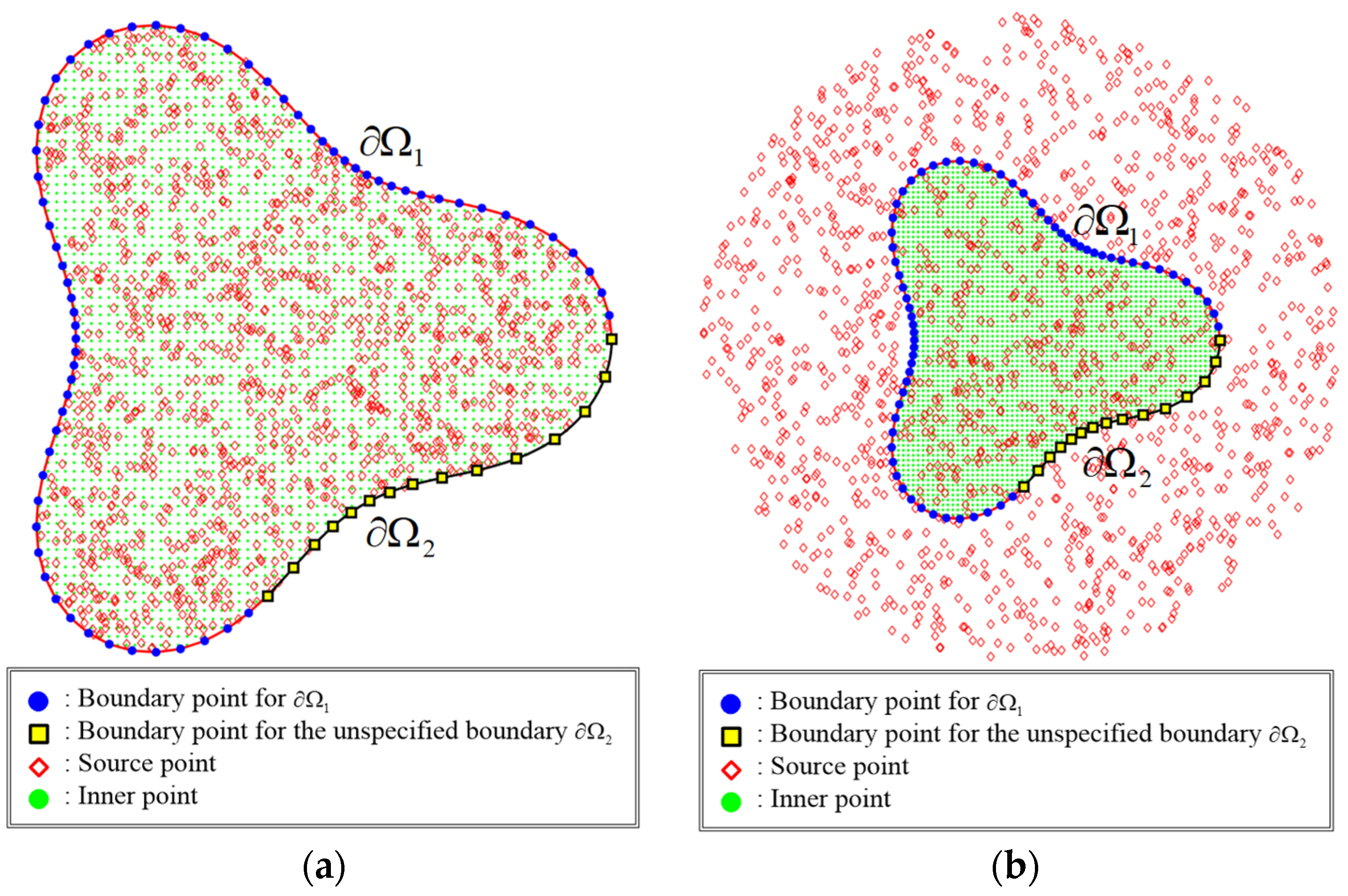
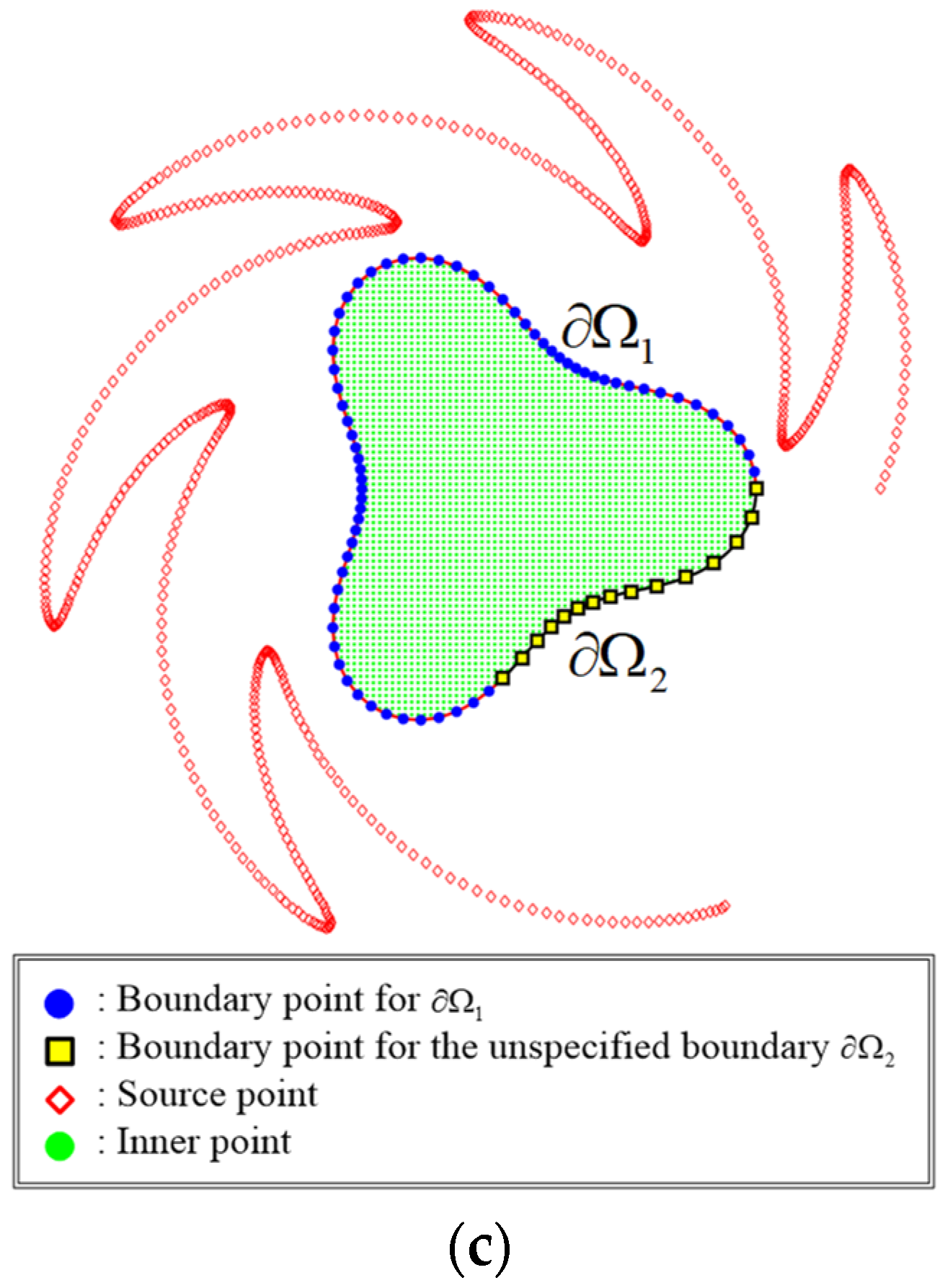
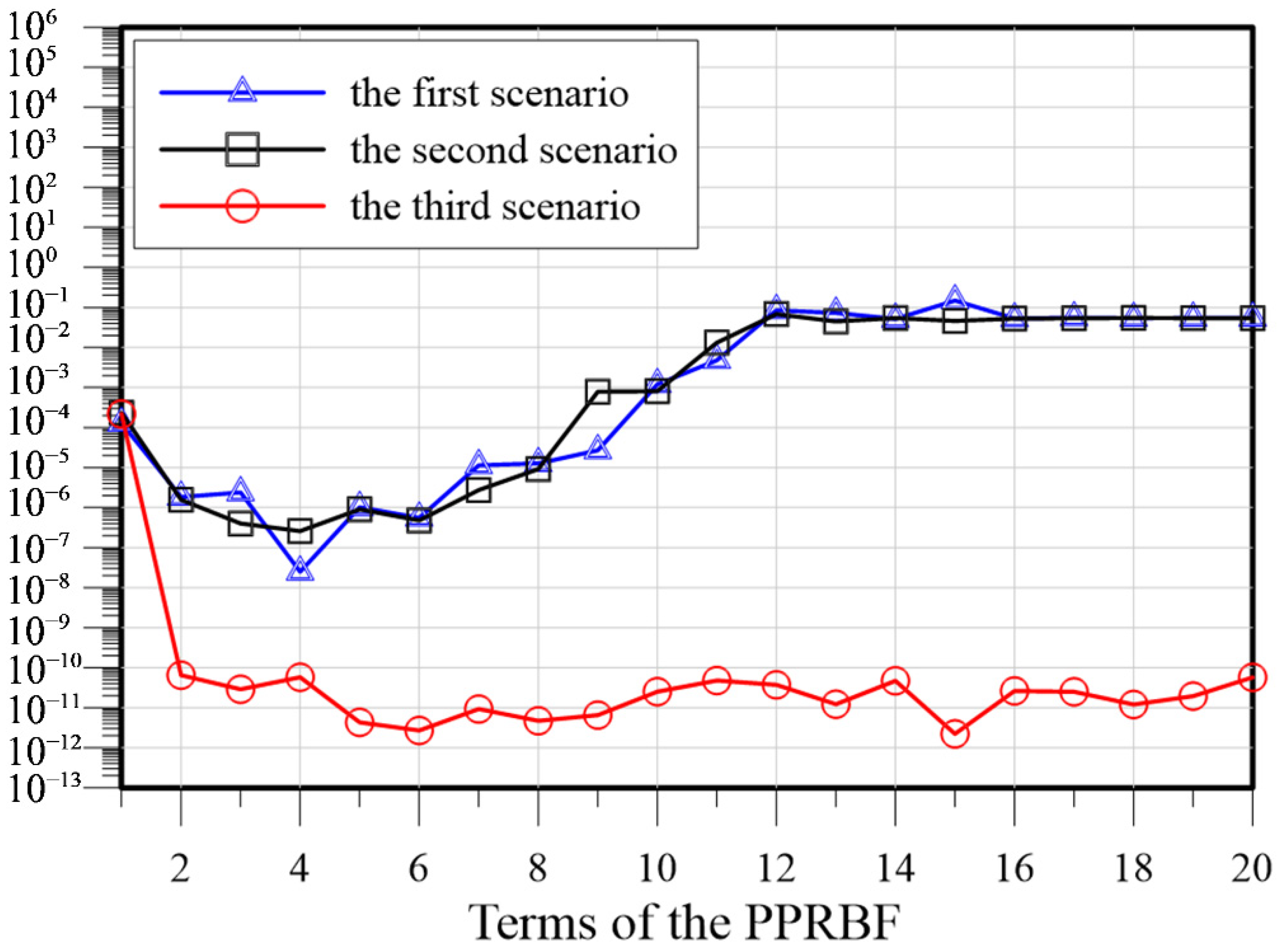
- Comparative analysis was conducted for three different scenarios for collocating sources, such as sources inside the domain randomly, random sources within a circle containing the domain, and sources outside the domain. It was found that the sources collocated outside the domain exhibit the best accuracy;
- (5)
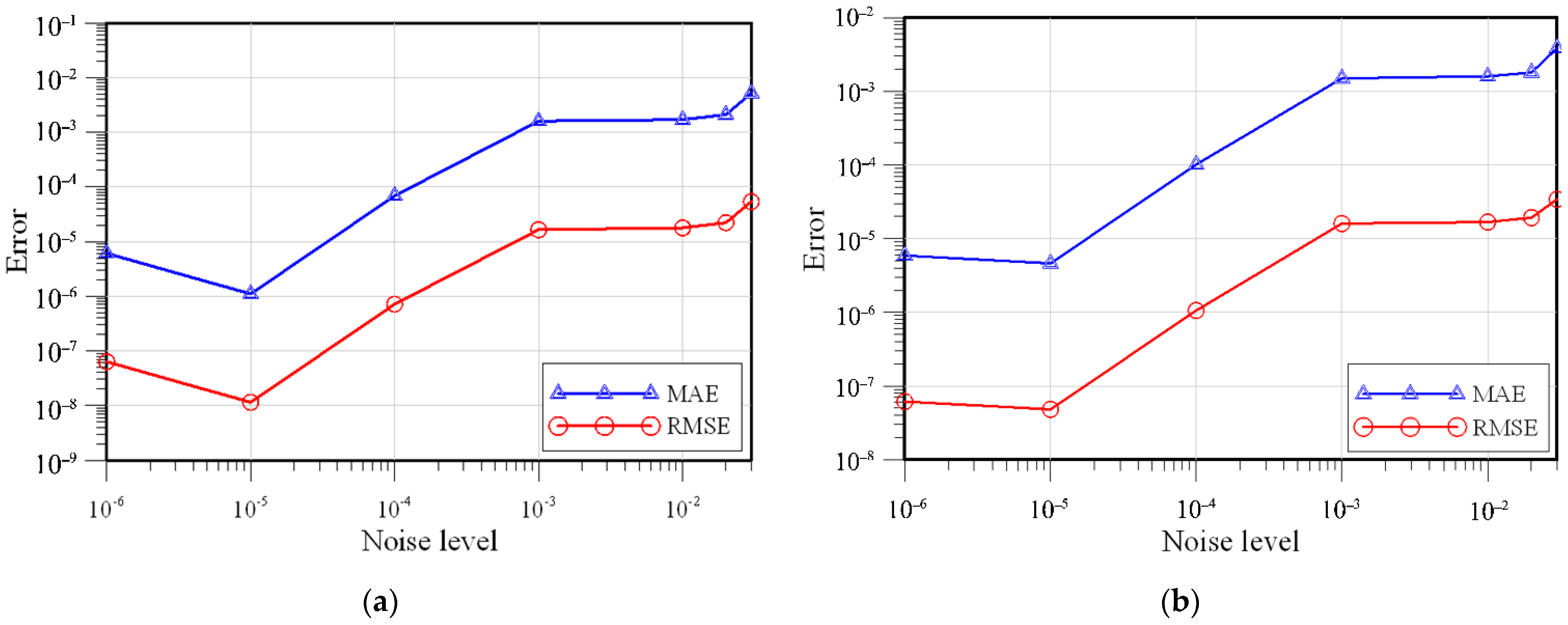
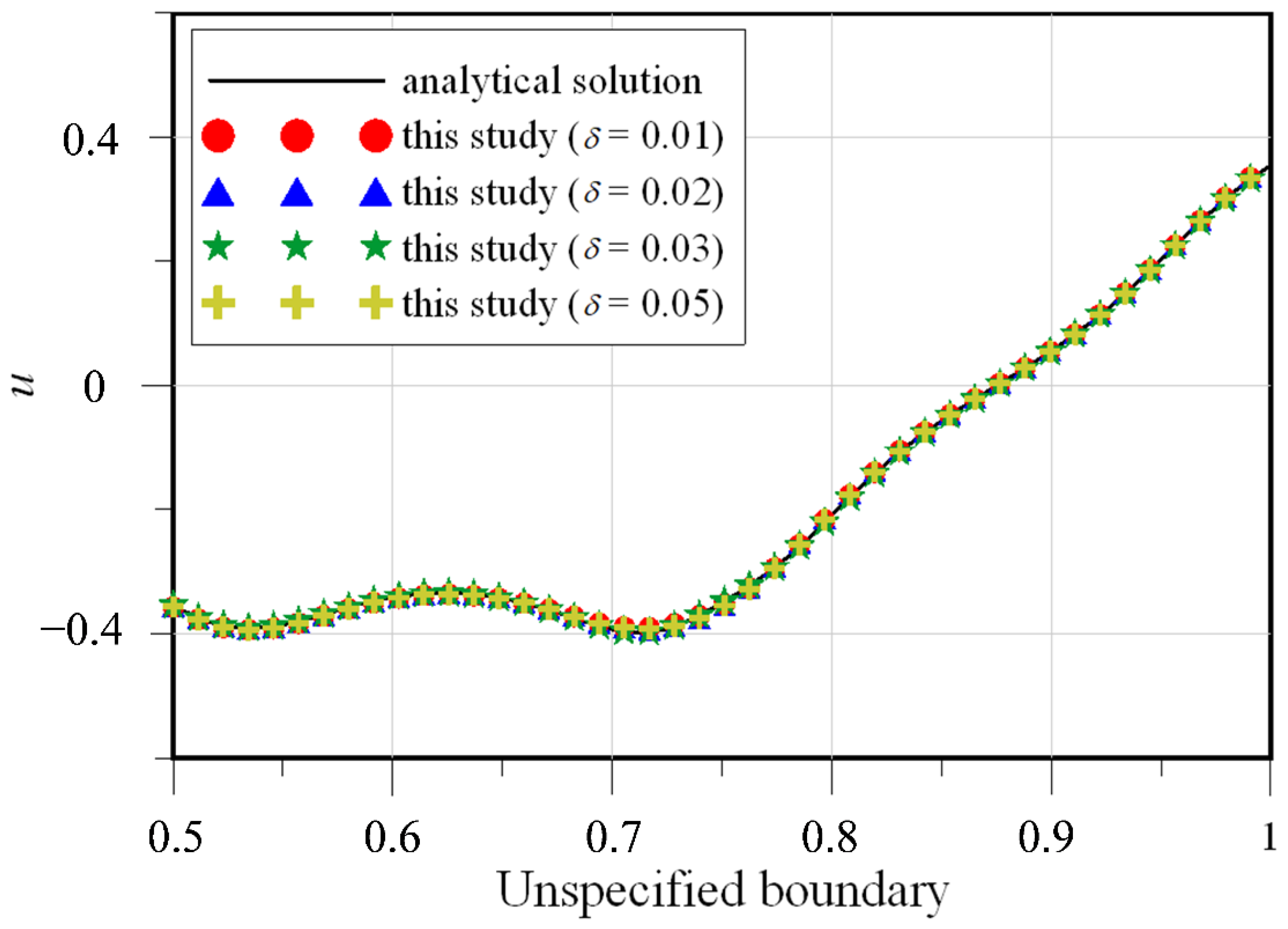
- The results depict that the proposed method could recover highly accurate solutions for inverse problems of the stationary convection–diffusion equation with cavities even with 5% noisy data. Moreover, the proposed method is a meshfree method and collocation only such that we can solve the inverse problems with highly complicated domain shapes easily and efficiently;
- (6)
- In this study, a pioneering work attempted to apply the radial basis function method with PPs for inverse problems with very complicated domains. We achieved a promising result for multiply connected domains containing a finite number of cavities. Further studies to investigate the characteristics of the proposed method to solve inverse problems in three dimensions are suggested.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oruç, Ö. A meshless multiple-scale polynomial method for numerical solution of 3d convection–diffusion problems with variable coefficients. Eng. Comput. 2020, 36, 1215–1228. [Google Scholar] [CrossRef]
- Chang, C.-M.; Ma, K.-C.; Chuang, M.-H. Temporal variability in the response of a linear time-invariant catchment system to a non-stationary inflow concentration field. Appl. Sci. 2020, 10, 5356. [Google Scholar] [CrossRef]
- Srivastava, M.H.; Ahmad, H.; Ahmad, I.; Thounthong, P.; Khan, N.M. Numerical simulation of three-dimensional fractional-order convection-diffusion PDEs by a local meshless method. Therm. Sci. 2020, 210, 1–14. [Google Scholar]
- Rap, A.; Elliott, L.; Ingham, D.B.; Lesnic, D.; Wen, X. The inverse source problem for the variable coefficients convection-diffusion equation. Inverse Probl. Sci. Eng. 2007, 15, 413–440. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, J.; Zhang, X. Semi-discretized numerical solution for time fractional convection–diffusion equation by RBF-FD. Appl. Math. Lett. 2022, 128, 107880. [Google Scholar] [CrossRef]
- Boyce, S.E.; Yeh, W.W.G. Parameter-independent model reduction of transient groundwater flow models: Application to inverse problems. Adv. Water Resour. 2014, 69, 168–180. [Google Scholar] [CrossRef]
- Pyatkov, S.G. Some classes of inverse problems of determining the source function in convection–diffusion systems. Differ. Equ. 2017, 53, 1352–1363. [Google Scholar] [CrossRef]
- Ku, C.Y.; Hong, L.D.; Liu, C.Y. Solving transient groundwater inverse problems using space–time collocation Trefftz method. Water 2020, 12, 3580. [Google Scholar] [CrossRef]
- Gurarslan, G.; Karahan, H. Solving inverse problems of groundwater-pollution-source identification using a differential evolution algorithm. Hydrogeol. J. 2015, 23, 1109–1119. [Google Scholar] [CrossRef]
- Golmohammadi, A.; Khaninezhad, M.R.M.; Jafarpour, B. Group-sparsity regularization for ill-posed subsurface flow inverse problems. Water Resour. Res. 2015, 51, 8607–8626. [Google Scholar] [CrossRef]
- Liu, C.S.; Wang, F. A meshless method for solving the nonlinear inverse Cauchy problem of elliptic type equation in a doubly-connected domain. Comput. Math. Appl. 2018, 76, 1837–1852. [Google Scholar] [CrossRef]
- Sarra, S.A. A local radial basis function method for advection–diffusion–reaction equations on complexly shaped domains. Appl. Math. Comput. 2012, 218, 9853–9865. [Google Scholar] [CrossRef] [Green Version]
- Uddin, M. RBF-PS scheme for solving the equal width equation. Appl. Math. Comput. 2013, 222, 619–631. [Google Scholar] [CrossRef]
- Liu, C.S.; Wang, P. An analytic adjoint Trefftz method for solving the singular parabolic convection–diffusion equation and initial pollution profile problem. Int. J. Heat Mass Transf. 2016, 101, 1177–1184. [Google Scholar] [CrossRef]
- Shivanian, E. Local radial basis function interpolation method to simulate 2D fractional-time convection-diffusion-reaction equations with error analysis. Numer. Meth. Part Differ. Equ. 2017, 33, 974–994. [Google Scholar] [CrossRef]
- Liu, C.Y.; Ku, C.Y.; Xiao, J.E.; Yeih, W. A novel spacetime collocation meshless method for solving two-dimensional backward heat conduction problems. Comp. Model. Eng. Sci. 2019, 118, 229–252. [Google Scholar] [CrossRef] [Green Version]
- Valencia, C.; Yuan, M. Radial basis function regularization for linear inverse problems with random noise. J. Multivar. Anal. 2013, 116, 92–108. [Google Scholar] [CrossRef]
- Khan, M.N.; Ahmad, I.; Ahmad, H. A radial basis function collocation method for space-dependent inverse heat problems. J. Appl. Comput. Mech. 2015, 8, 239–254. [Google Scholar]
- Golbabai, A.; Kalarestaghi, N. Improved localized radial basis functions with fitting factor for dominated convection-diffusion differential equations. Eng. Anal. Bound. Elem. 2018, 92, 124–135. [Google Scholar] [CrossRef]
- Rashidinia, J.; Khasi, M.; Fasshauer, G.E. A stable Gaussian radial basis function method for solving nonlinear unsteady convection–diffusion–reaction equations. Comput. Math. Appl. 2018, 75, 1831–1850. [Google Scholar] [CrossRef]
- Liu, C.Y.; Ku, C.Y.; Hong, L.D.; Hsu, S.M. Infinitely smooth polyharmonic RBF collocation method for numerical solution of elliptic PDEs. Mathematics 2021, 9, 1535. [Google Scholar] [CrossRef]
- Santos, L.G.C.; Manzanares-Filho, N.; Menon, G.J.; Abreu, E. Comparing RBF-FD approximations based on stabilized Gaussians and on polyharmonic splines with polynomials. Int. J. Numer. Methods Eng. 2018, 115, 462–500. [Google Scholar] [CrossRef]
- Ku, C.Y.; Liu, C.Y.; Xiao, J.E.; Hsu, S.-M.; Yeih, W. A collocation method with space–time radial polynomials for inverse heat conduction problems. Eng. Anal. Bound. Elem. 2021, 122, 117–131. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Level | ||||
|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | |
| Wave Number | ||||
|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | |
| 100 | ||||
| 200 | ||||
| 300 | ||||
| 400 | ||||
| 500 | ||||
| 600 | ||||
| 700 | ||||
| 800 | ||||
| 900 | ||||
| 1000 | ||||
| Noise Level | Case C | Case D | ||
|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, J.-E.; Ku, C.-Y.; Liu, C.-Y. Solving Inverse Problems of Stationary Convection–Diffusion Equation Using the Radial Basis Function Method with Polyharmonic Polynomials. Appl. Sci. 2022, 12, 4294. https://doi.org/10.3390/app12094294
Xiao J-E, Ku C-Y, Liu C-Y. Solving Inverse Problems of Stationary Convection–Diffusion Equation Using the Radial Basis Function Method with Polyharmonic Polynomials. Applied Sciences. 2022; 12(9):4294. https://doi.org/10.3390/app12094294
Chicago/Turabian StyleXiao, Jing-En, Cheng-Yu Ku, and Chih-Yu Liu. 2022. "Solving Inverse Problems of Stationary Convection–Diffusion Equation Using the Radial Basis Function Method with Polyharmonic Polynomials" Applied Sciences 12, no. 9: 4294. https://doi.org/10.3390/app12094294
APA StyleXiao, J. -E., Ku, C. -Y., & Liu, C. -Y. (2022). Solving Inverse Problems of Stationary Convection–Diffusion Equation Using the Radial Basis Function Method with Polyharmonic Polynomials. Applied Sciences, 12(9), 4294. https://doi.org/10.3390/app12094294