
Augmented Reality: Mapping Methods and Tools for Enhancing the Human Role in Healthcare HMI





Abstract
:1. Introduction
2. Materials and Methods
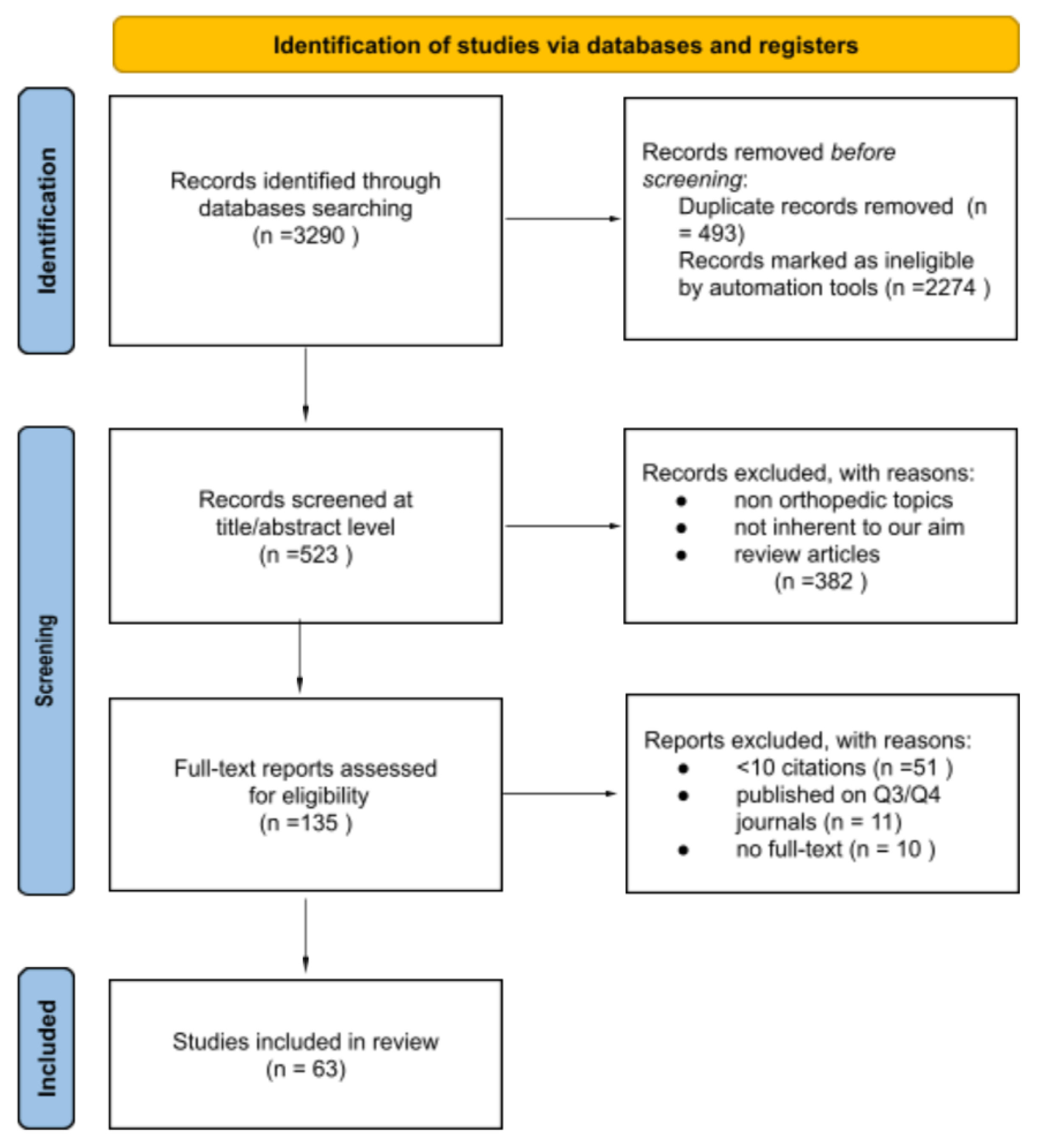
2.1. Literature Search
2.2. Selection Process
- Articles written in the English language;
- AR was used in orthopedic surgery, training, and rehabilitation;
- Studies have received a minimum of ten citations if published in 2018, 2019, and 2020. This criterion has not been applied to studies published in 2021;
- Studies with the greatest impact on the scientific community. Authors chose the quartile metric to identify suitable studies; indeed, only works published in Q1 and Q2 journals were selected. This choice was made to identify papers whose reliability is recognized at the international level.
- Review papers, thesis, book chapters, or oral presentations;
- Non-English papers;
- Articles without full-text available;
- AR application field is different from orthopedic surgery.
3. Results
3.1. Training
3.2. Rehabilitation
3.3. Intraoperative Solution
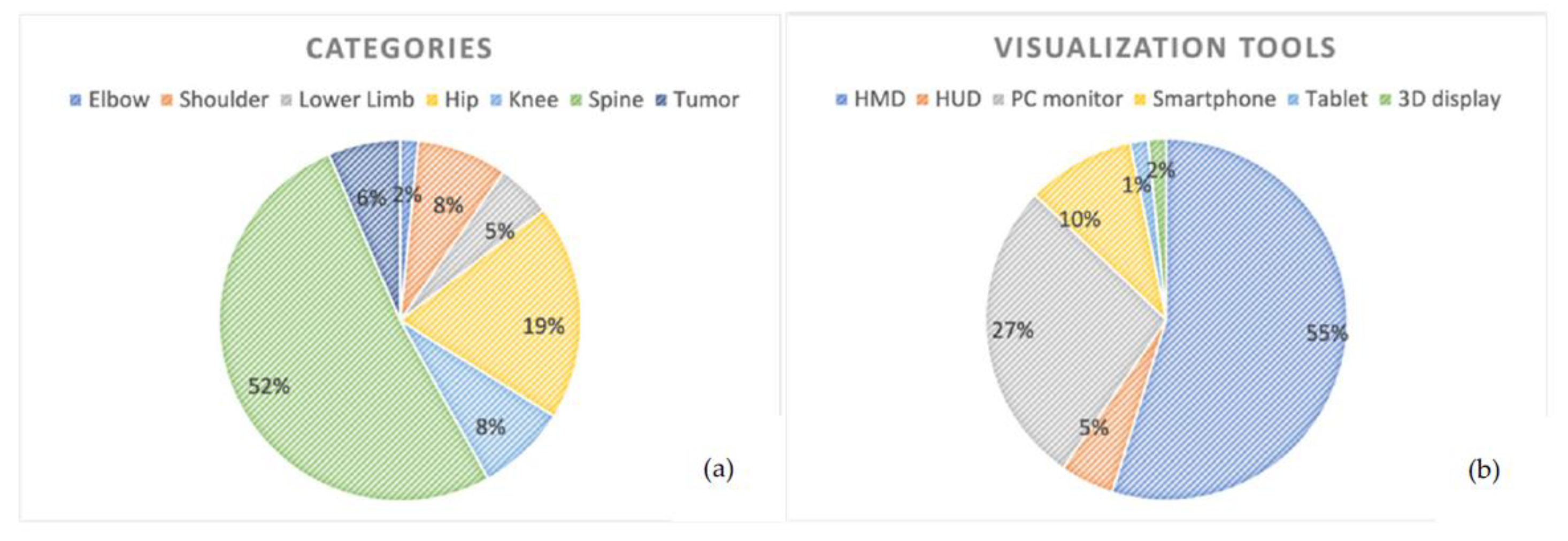
3.3.1. Lower and Upper Limbs
3.3.2. Spine Surgery
3.3.3. Tumor Surgery
4. Discussion
4.1. Visualization
4.2. Registration and Tracking
4.3. Implications for Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ke, Q.; Liu, J.; Bennamoun, M.; An, S.; Sohel, F.; Boussaid, F. Computer Vision for Human-Machine Interaction. Comput. Vis. Assist. Healthc. 2018, 127–145. [Google Scholar] [CrossRef]
- Marcolin, F.; Scurati, G.W.; Ulrich, L.; Nonis, F.; Vezzetti, E.; Dozio, N.; Ferrise, F.; Stork, A.; Basole, R.C. Affective Virtual Reality: How to Design Artificial Experiences Impacting Human Emotions. IEEE Comput. Graph. Appl. 2021, 41, 171–178. [Google Scholar] [CrossRef]
- Ulrich, L.; Dugelay, J.L.; Vezzetti, E.; Moos, S.; Marcolin, F. Perspective Morphometric Criteria for Facial Beauty and Proportion Assessment. Appl. Sci. 2019, 10, 8. [Google Scholar] [CrossRef] [Green Version]
- Azuma, R.T. A Survey of Augmented Reality. Presence Teleoperators Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Azuma, R.; Baillot, Y.; Behringer, R.; Feiner, S.; Julier, S.; MacIntyre, B. Recent Advances in Augmented Reality. IEEE Comput. Graph. Appl. 2001, 21, 34–47. [Google Scholar] [CrossRef] [Green Version]
- Dozio, N.; Marcolin, F.; Scurati, G.W.; Ulrich, L.; Nonis, F.; Vezzetti, E.; Marsocci, G.; la Rosa, A.; Ferrise, F. A Design Methodology for Affective Virtual Reality. Int. J. Hum. Comput. Stud. 2022, 162, 102791. [Google Scholar] [CrossRef]
- Pellas, N.; Mystakidis, S.; Kazanidis, I. Immersive Virtual Reality in K-12 and Higher Education: A Systematic Review of the Last Decade Scientific Literature. Virtual Real. 2021, 25, 835–861. [Google Scholar] [CrossRef]
- Milgram, P.; Takemura, H.; Utsumi, A.; Kishino, F. Augmented Reality: A Class of Displays on the Reality-Virtuality Continuum. In Proceedings of the Telemanipulator and telepresence technologies. International Society for Optics and Photonics, Bellingham, WA, USA, 31 October–1 November 1994; Volume 2351, pp. 282–292. [Google Scholar] [CrossRef]
- Mystakidis, S. Metaverse. Encyclopedia 2022, 2, 486–497. [Google Scholar] [CrossRef]
- Verhey, J.T.; Haglin, J.M.; Verhey, E.M.; Hartigan, D.E. Virtual, Augmented, and Mixed Reality Applications in Orthopedic Surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2020, 16, e2067. [Google Scholar] [CrossRef]
- OPUS at UTS: Augmented Reality Games: A Review—Open Publications of UTS Scholars. Available online: https://opus.lib.uts.edu.au/handle/10453/23503 (accessed on 10 March 2022).
- Vávra, P.; Roman, J.; Zonča, P.; Ihnát, P.; Němec, M.; Kumar, J.; Habib, N.; El-Gendi, A. Recent Development of Augmented Reality in Surgery: A Review. J. Healthc. Eng. 2017, 2017, 4574172. [Google Scholar] [CrossRef]
- Riva, G.; Baños, R.M.; Botella, C.; Mantovani, F.; Gaggioli, A. Transforming Experience: The Potential of Augmented Reality and Virtual Reality for Enhancing Personal and Clinical Change. Front. Psychiatry 2016, 7, 164. [Google Scholar] [CrossRef] [PubMed]
- Uppot, R.N.; Laguna, B.; McCarthy, C.J.; de Novi, G.; Phelps, A.; Siegel, E.; Courtier, J. Implementing Virtual and Augmented Reality Tools for Radiology Education and Training, Communication, and Clinical Care. Radiology 2019, 291, 570–580. [Google Scholar] [CrossRef] [PubMed]
- Sutherland, J.; Belec, J.; Sheikh, A.; Chepelev, L.; Althobaity, W.; Chow, B.J.W.; Mitsouras, D.; Christensen, A.; Rybicki, F.J.; Russa, D.J.L. Applying Modern Virtual and Augmented Reality Technologies to Medical Images and Models. J. Digit. Imaging 2019, 32, 38–53. [Google Scholar] [CrossRef]
- Jeong, B.; Yoon, J. Competitive Intelligence Analysis of Augmented Reality Technology Using Patent Information. Sustainability 2017, 9, 497. [Google Scholar] [CrossRef] [Green Version]
- Ulrich, L.; Baldassarre, F.; Marcolin, F.; Moos, S.; Tornincasa, S.; Vezzetti, E.; Speranza, D.; Ramieri, G.; Zavattero, E. A Procedure for Cutting Guides Design in Maxillofacial Surgery: A Case-Study. Lect. Notes Mech. Eng. 2019, 301–310. [Google Scholar] [CrossRef]
- Casari, F.A.; Navab, N.; Hruby, L.A.; Kriechling, P.; Nakamura, R.; Tori, R.; de Lourdes dos Santos Nunes, F.; Queiroz, M.C.; Fürnstahl, P.; Farshad, M. Augmented Reality in Orthopedic Surgery Is Emerging from Proof of Concept Towards Clinical Studies: A Literature Review Explaining the Technology and Current State of the Art. Curr. Rev. Musculoskelet. Med. 2021, 14, 192–203. [Google Scholar] [CrossRef] [PubMed]
- Sakai, D.; Joyce, K.; Sugimoto, M.; Horikita, N.; Hiyama, A.; Sato, M.; Devitt, A.; Watanabe, M. Augmented, Virtual and Mixed Reality in Spinal Surgery: A Real-World Experience. J. Orthop. Surg. 2020, 28, 2309499020952698. [Google Scholar] [CrossRef]
- Longo, U.G.; de Salvatore, S.; Candela, V.; Zollo, G.; Calabrese, G.; Fioravanti, S.; Giannone, L.; Marchetti, A.; de Marinis, M.G.; Denaro, V. Augmented Reality, Virtual Reality and Artificial Intelligence in Orthopedic Surgery: A Systematic Review. Appl. Sci. 2021, 11, 3253. [Google Scholar] [CrossRef]
- Ara, J.; Benta Karim, F.; Saud Alsubaie, M.A.; Arafat Bhuiyan, Y.; Ismail Bhuiyan, M.; Begum Bhyan, S.; Bhuiyan, H. Comprehensive Analysis of Augmented Reality Technology in Modern Healthcare System. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 840–849. [Google Scholar] [CrossRef]
- PICO Process—Wikipedia. Available online: https://en.wikipedia.org/wiki/PICO_process (accessed on 14 March 2022).
- PRISMA. Available online: http://www.prisma-statement.org/ (accessed on 14 March 2022).
- Ackermann, J.; Liebmann, F.; Hoch, A.; Snedeker, J.G.; Farshad, M.; Rahm, S.; Zingg, P.O.; Fürnstahl, P. Augmented Reality Based Surgical Navigation of Complex Pelvic Osteotomies—A Feasibility Study on Cadavers. Appl. Sci. 2021, 11, 312. [Google Scholar] [CrossRef]
- Charles, Y.P.; Cazzato, R.L.; Nachabe, R.; Chatterjea, A.; Steib, J.P.; Gangi, A. Minimally Invasive Transforaminal Lumbar Interbody Fusion Using Augmented Reality Surgical Navigation for Percutaneous Pedicle Screw Placement. Clin. Spine Surg. 2021, 34, E415–E424. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Cui, X.; Han, B.; Liu, J.; Zhang, X.; Liao, H. Augmented Reality Navigation for Minimally Invasive Knee Surgery Using Enhanced Arthroscopy. Comput. Methods Programs Biomed. 2021, 201, 105952. [Google Scholar] [CrossRef] [PubMed]
- Condino, S.; Turini, G.; Mamone, V.; Parchi, P.D.; Ferrari, V. Hybrid Spine Simulator Prototype for X-Ray Free Pedicle Screws Fixation Training. Appl. Sci. 2021, 11, 1038. [Google Scholar] [CrossRef]
- Dennler, C.; Bauer, D.E.; Scheibler, A.G.; Spirig, J.; Götschi, T.; Fürnstahl, P.; Farshad, M. Augmented Reality in the Operating Room: A Clinical Feasibility Study. BMC Musculoskelet. Disord. 2021, 22, 451. [Google Scholar] [CrossRef] [PubMed]
- Dennler, C.; Safa, N.A.; Bauer, D.E.; Wanivenhaus, F.; Liebmann, F.; Götschi, T.; Farshad, M. Augmented Reality Navigated Sacral-Alar-Iliac Screw Insertion. Int. J. Spine Surg. 2021, 15, 161–168. [Google Scholar] [CrossRef] [PubMed]
- Fucentese, S.F.; Koch, P.P. A Novel Augmented Reality-Based Surgical Guidance System for Total Knee Arthroplasty. Arch. Orthop. Trauma Surg. 2021, 141, 2227–2233. [Google Scholar] [CrossRef] [PubMed]
- Gu, W.; Shah, K.; Knopf, J.; Navab, N.; Unberath, M. Feasibility of Image-Based Augmented Reality Guidance of Total Shoulder Arthroplasty Using Microsoft HoloLens 1. Comput. Methods Biomech. Biomed. Eng. Imaging Vis. 2021, 9, 261–270. [Google Scholar] [CrossRef]
- Hu, X.; Rodriguez y Baena, F.; Cutolo, F. Head-Mounted Augmented Reality Platform for Markerless Orthopaedic Navigation. IEEE J. Biomed. Health Inform. 2021, 26, 910–921. [Google Scholar] [CrossRef]
- Kriechling, P.; Loucas, R.; Loucas, M.; Casari, F.; Fürnstahl, P.; Wieser, K. Augmented Reality through Head-Mounted Display for Navigationof Baseplate Component Placement in Reverse Total Shoulder Arthroplasty: A Cadaveric Study. Arch. Orthop. Trauma Surg. 2021, 1, 1447–1453. [Google Scholar] [CrossRef]
- Kriechling, P.; Roner, S.; Liebmann, F.; Casari, F.; Fürnstahl, P.; Wieser, K. Augmented Reality for Base Plate Component Placement in Reverse Total Shoulder Arthroplasty: A Feasibility Study. Arch. Orthop. Trauma Surg. 2021, 141, 1447–1453. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Li, Q.; Yu, S.; Chen, W.; Wan, S.; Chen, D.; Liu, R.; Ding, F. Treating Lumbar Fracture Using the Mixed Reality Technique. BioMed Res. Int. 2021, 2021, 6620746–6620751. [Google Scholar] [CrossRef] [PubMed]
- Molina, C.A.; Dibble, C.F.; Larry Lo, S.F.; Witham, T.; Sciubba, D.M. Augmented Reality–Mediated Stereotactic Navigation for Execution of En Bloc Lumbar Spondylectomy Osteotomies. J. Neurosurg. Spine 2021, 34, 700–705. [Google Scholar] [CrossRef] [PubMed]
- Moreta-Martinez, R.; Pose-Díez-De-la-lastra, A.; Calvo-Haro, J.A.; Mediavilla-Santos, L.; Pérez-Mañanes, R.; Pascau, J. Combining Augmented Reality and 3d Printing to Improve Surgical Workflows in Orthopedic Oncology: Smartphone Application and Clinical Evaluation. Sensors 2021, 21, 1370. [Google Scholar] [CrossRef] [PubMed]
- Schlueter-Brust, K.; Henckel, J.; Katinakis, F.; Buken, C.; Opt-Eynde, J.; Pofahl, T.; Rodriguez Y Baena, F.; Tatti, F. Augmented-Reality-Assisted K-Wire Placement for Glenoid Component Positioning in Reversed Shoulder Arthroplasty: A Proof-of-Concept Study. J. Pers. Med. 2021, 11, 777. [Google Scholar] [CrossRef] [PubMed]
- Tsukada, S.; Ogawa, H.; Hirasawa, N.; Nishino, M.; Aoyama, H.; Kurosaka, K. Augmented Reality- vs Accelerometer-Based Portable Navigation System to Improve the Accuracy of Acetabular Cup Placement During Total Hip Arthroplasty in the Lateral Decubitus Position. J. Arthroplast. 2021, 37, 488–494. [Google Scholar] [CrossRef] [PubMed]
- Tsukada, S.; Ogawa, H.; Nishino, M.; Kurosaka, K.; Hirasawa, N. Augmented Reality-Assisted Femoral Bone Resection in Total Knee Arthroplasty. JBJS Open Access 2021, 6, e21. [Google Scholar] [CrossRef] [PubMed]
- Tu, P.; Gao, Y.; Lungu, A.J.; Li, D.; Wang, H.; Chen, X. Augmented Reality Based Navigation for Distal Interlocking of Intramedullary Nails Utilizing Microsoft HoloLens 2. Comput. Biol. Med. 2021, 133, 104402. [Google Scholar] [CrossRef]
- Veloso, R.; Magalhães, R.; Marques, A.; Gomes, P.V.; Pereira, J.; González, M.A.; Penedo, M.G. Mixed Reality in an Operating Room Using Hololens 2—The Use of the Remote Assistance from Manufacturers Techinicians during the Surgeries. Eng. Proc. 2021, 7, 54. [Google Scholar]
- von Atzigen, M.; Liebmann, F.; Hoch, A.; Bauer, D.E.; Snedeker, J.G.; Farshad, M.; Fürnstahl, P. HoloYolo: A Proof-of-Concept Study for Marker-Less Surgical Navigation of Spinal Rod Implants with Augmented Reality and on-Device Machine Learning. Int. J. Med. Robot. Comput. Assist. Surg. 2021, 17, e2184. [Google Scholar] [CrossRef]
- Yahanda, A.T.; Moore, E.; Ray, W.Z.; Pennicooke, B.; Jennings, J.W.; Molina, C.A. First In-Human Report of the Clinical Accuracy of Thoracolumbar Percutaneous Pedicle Screw Placement Using Augmented Reality Guidance. Neurosurg. Focus 2021, 51, E10. [Google Scholar] [CrossRef]
- Yamamoto, M.; Oyama, S.; Otsuka, S.; Murakami, Y.; Yokota, H.; Hirata, H. Experimental Pilot Study for Augmented Reality-Enhanced Elbow Arthroscopy. Sci. Rep. 2021, 11, 4650–4659. [Google Scholar] [CrossRef] [PubMed]
- Yanni, D.S.; Ozgur, B.M.; Louis, R.G.; Shekhtman, Y.; Iyer, R.R.; Boddapati, V.; Iyer, A.; Patel, P.D.; Jani, R.; Cummock, M.; et al. Real-Time Navigation Guidance with Intraoperative CT Imaging for Pedicle Screw Placement Using an Augmented Reality Head-Mounted Display: A Proof-of-Concept Study. Neurosurg. Focus 2021, 51, E11. [Google Scholar] [CrossRef] [PubMed]
- Alexander, C.; Loeb, A.E.; Fotouhi, J.; Navab, N.; Armand, M.; Khanuja, H.S. Augmented Reality for Acetabular Component Placement in Direct Anterior Total Hip Arthroplasty. J. Arthroplast. 2020, 35, 1636–1641. [Google Scholar] [CrossRef] [PubMed]
- Auloge, P.; Luigi Cazzato, R.; Ramamurthy, N.; de Marini, P.; Rousseau, C.; Garnon, J.; Philippe Charles, Y.; Steib, J.-P.; Gangi, A.; Marini, D.P.; et al. Augmented Reality and Artificial Intelligence-Based Navigation during Percutaneous Vertebroplasty: A Pilot Randomised Clinical Trial. Eur. Spine J. 2020, 29, 1580–1589. [Google Scholar] [CrossRef]
- Burström, G.; Balicki, M.; Patriciu, A.; Kyne, S.; Popovic, A.; Holthuizen, R.; Homan, R.; Skulason, H.; Persson, O.; Edström, E.; et al. Feasibility and Accuracy of a Robotic Guidance System for Navigated Spine Surgery in a Hybrid Operating Room: A Cadaver Study. Sci. Rep. 2020, 10, 7522–7530. [Google Scholar] [CrossRef]
- Carl, B.; Bopp, M.; Saß, B.; Pojskic, M.; Voellger, B.; Nimsky, C. Spine Surgery Supported by Augmented Reality. Glob. Spine J. 2020, 10, 41S–55S. [Google Scholar] [CrossRef]
- Dennler, C.; Jaberg, L.; Spirig, J.; Agten, C.; Götschi, T.; Fürnstahl, P.; Farshad, M. Augmented Reality-Based Navigation Increases Precision of Pedicle Screw Insertion. J. Orthop. Surg. Res. 2020, 15, 174. [Google Scholar] [CrossRef]
- Edström, E.; Burström, G.; Omar, A.; Nachabe, R.; Söderman, M.; Persson, O.; Gerdhem, P.; Elmi-Terander, A. Augmented Reality Surgical Navigation in Spine Surgery to Minimize Staff Radiation Exposure. Spine 2020, 45, E45–E53. [Google Scholar] [CrossRef]
- Edström, E.; Burström, G.; Nachabe, R.; Gerdhem, P.; Terander, A.E. A Novel Augmented-Reality-Based Surgical Navigation System for Spine Surgery in a Hybrid Operating Room: Design, Workflow, and Clinical Applications. Oper. Neurosurg. 2020, 18, 496–502. [Google Scholar] [CrossRef] [Green Version]
- Elmi-Terander, A.; Burström, G.; Nachabé, R.; Fagerlund, M.; Ståhl, F.; Charalampidis, A.; Edström, E.; Gerdhem, P. Augmented Reality Navigation with Intraoperative 3D Imaging vs Fluoroscopy-Assisted Free-Hand Surgery for Spine Fixation Surgery: A Matched-Control Study Comparing Accuracy. Sci. Rep. 2020, 10, 707–714. [Google Scholar] [CrossRef] [Green Version]
- Molina, C.A.; Phillips, F.M.; Colman, M.W.; Ray, W.Z.; Khan, M.; Orru’, E.; Poelstra, K.; Khoo, L. A Cadaveric Precision and Accuracy Analysis of Augmented Reality–Mediated Percutaneous Pedicle Implant Insertion. J. Neurosurg. Spine 2021, 34, 316–324. [Google Scholar] [CrossRef] [PubMed]
- Müller, F.; Roner, S.; Liebmann, F.; Spirig, J.M.; Fürnstahl, P.; Farshad, M. Augmented Reality Navigation for Spinal Pedicle Screw Instrumentation Using Intraoperative 3D Imaging. Spine J. 2020, 20, 621–628. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, H.; Kurosaka, K.; Sato, A.; Hirasawa, N.; Matsubara, M.; Tsukada, S. Does An Augmented Reality-Based Portable Navigation System Improve the Accuracy of Acetabular Component Orientation during THA? A Randomized Controlled Trial. Clin. Orthop. Relat. Res. 2020, 478, 935–943. [Google Scholar] [CrossRef]
- Peh, S.; Chatterjea, A.; Pfarr, J.; Schäfer, J.P.; Weuster, M.; Klüter, T.; Seekamp, A.; Lippross, S. Accuracy of Augmented Reality Surgical Navigation for Minimally Invasive Pedicle Screw Insertion in the Thoracic and Lumbar Spine with a New Tracking Device. Spine J. 2020, 20, 629–637. [Google Scholar] [CrossRef] [PubMed]
- Burström, G.; Nachabe, R.; Persson, O.; Edström, E.; Elmi Terander, A. Augmented and Virtual Reality Instrument Tracking for Minimally Invasive Spine Surgery: A Feasibility and Accuracy Study. Spine 2019, 44, 1097–1104. [Google Scholar] [CrossRef] [PubMed]
- Carl, B.; Bopp, M.; Saß, B.; Nimsky, C. Microscope-Based Augmented Reality in Degenerative Spine Surgery: Initial Experience. World Neurosurg. 2019, 128, e541–e551. [Google Scholar] [CrossRef]
- Carl, B.; Bopp, M.; Saß, B.; Voellger, B.; Nimsky, C. Implementation of Augmented Reality Support in Spine Surgery. Eur. Spine J. 2019, 28, 1697–1711. [Google Scholar] [CrossRef]
- Condino, S.; Turini, G.; Viglialoro, R.; Gesi, M.; Ferrari, V. Wearable Augmented Reality Application for Shoulder Rehabilitation. Electronics 2019, 8, 1178. [Google Scholar] [CrossRef] [Green Version]
- Elmi-Terander, A.; Burström, G.; Nachabe, R.; Skulason, H.; Pedersen, K.; Fagerlund, M.; Ståhl, F.; Charalampidis, A.; Söderman, M.; Holmin, S.; et al. Pedicle Screw Placement Using Augmented Reality Surgical Navigation With Intraoperative 3D Imaging: A First In-Human Prospective Cohort Study. Spine 2019, 44, 517–525. [Google Scholar] [CrossRef]
- Gibby, J.T.; Swenson, S.A.; Cvetko, S.; Rao, R.; Javan, R. Head-Mounted Display Augmented Reality to Guide Pedicle Screw Placement Utilizing Computed Tomography. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 525–535. [Google Scholar] [CrossRef]
- Lei, P.-F.; Su, S.-L.; Kong, L.-Y.; Wang, C.-G.; Zhong, D.; Hu, Y.-H. Mixed Reality Combined with Three-Dimensional Printing Technology in Total Hip Arthroplasty: An Updated Review with a Preliminary Case Presentation. Orthop. Surg. 2019, 11, 914. [Google Scholar] [CrossRef] [PubMed]
- Liebmann, F.; Roner, S.; von Atzigen, M.; Scaramuzza, D.; Sutter, R.; Snedeker, J.; Farshad, M.; Fürnstahl, P. Pedicle Screw Navigation Using Surface Digitization on the Microsoft HoloLens. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 1157–1165. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Wu, J.; Tang, Y.; Li, H.; Wang, W.; Li, C.; Zhou, Y. Percutaneous Placement of Lumbar Pedicle Screws via Intraoperative CT Image-Based Augmented Reality-Guided Technology. J. Neurosurg. Spine 2020, 32, 542–547. [Google Scholar] [CrossRef] [PubMed]
- Logishetty, K.; Western, L.; Morgan, R.; Iranpour, F.; Cobb, J.P.; Auvinet, E. Can an Augmented Reality Headset Improve Accuracy of Acetabular Cup Orientation in Simulated THA? A Randomized Trial. Clin. Orthop. Relat. Res. 2019, 477, 1190. [Google Scholar] [CrossRef] [PubMed]
- Molina, C.A.; Theodore, N.; Karim Ahmed, A.; Westbroek, E.M.; Mirovsky, Y.; Harel, R.; Orru, E.; Khan, M.; Witham, T.; Sciubba, D.M. Augmented Reality–Assisted Pedicle Screw Insertion: A Cadaveric Proof-of-Concept Study. J. Neurosurg. Spine 2019, 31, 139–146. [Google Scholar] [CrossRef]
- Pokhrel, S.; Alsadoon, A.; Prasad, P.W.C.; Paul, M. A Novel Augmented Reality (AR) Scheme for Knee Replacement Surgery by Considering Cutting Error Accuracy. Int. J. Med. Robot. Comput. Assist. Surg. 2019, 15, e1958. [Google Scholar] [CrossRef] [Green Version]
- Tsukada, S.; Ogawa, H.; Nishino, M.; Kurosaka, K.; Hirasawa, N. Augmented Reality-Based Navigation System Applied to Tibial Bone Resection in Total Knee Arthroplasty. J. Exp. Orthop. 2019, 6, 44–50. [Google Scholar] [CrossRef]
- Urakov, T.M.; Wang, M.Y.; Levi, A.D. Workflow Caveats in Augmented Reality–Assisted Pedicle Instrumentation: Cadaver Lab. World Neurosurg. 2019, 126, e1449–e1455. [Google Scholar] [CrossRef]
- Wanivenhaus, F.; Neuhaus, C.; Liebmann, F.; Roner, S.; Spirig, J.M.; Farshad, M. Augmented Reality-Assisted Rod Bending in Spinal Surgery. Spine J. 2019, 19, 1687–1689. [Google Scholar] [CrossRef]
- Wei, P.; Yao, Q.; Xu, Y.; Zhang, H.; Gu, Y.; Wang, L. Percutaneous Kyphoplasty Assisted with/without Mixed Reality Technology in Treatment of OVCF with IVC: A Prospective Study. J. Orthop. Surg. Res. 2019, 14, 255–263. [Google Scholar] [CrossRef] [Green Version]
- Agten, C.A.; Dennler, C.; Rosskopf, A.B.; Jaberg, L.; Pfirrmann, C.W.A.; Farshad, M. Augmented Reality-Guided Lumbar Facet Joint Injections. Investig. Radiol. 2018, 53, 495–498. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cho, H.S.; Park, M.S.; Gupta, S.; Han, I.; Kim, H.S.; Choi, H.; Hong, J. Can Augmented Reality Be Helpful in Pelvic Bone Cancer Surgery? An In Vitro Study. Clin. Orthop. Relat. Res. 2018, 476, 1719–1725. [Google Scholar] [CrossRef] [PubMed]
- Condino, S.; Turini, G.; Parchi, P.D.; Viglialoro, R.M.; Piolanti, N.; Gesi, M.; Ferrari, M.; Ferrari, V. How to Build a Patient-Specific Hybrid Simulator for Orthopaedic Open Surgery: Benefits and Limits of Mixed-Reality Using the Microsoft Hololens. J. Healthc. Eng. 2018, 2018, 5435097. [Google Scholar] [CrossRef] [PubMed]
- Deib, G.; Johnson, A.; Unberath, M.; Yu, K.; Andress, S.; Qian, L.; Osgood, G.; Navab, N.; Hui, F.; Gailloud, P. Image Guided Percutaneous Spine Procedures Using an Optical See-through Head Mounted Display: Proof of Concept and Rationale. J. NeuroInterv. Surg. 2018, 10, 1187–1191. [Google Scholar] [CrossRef] [PubMed]
- Elmi-Terander, A.; Nachabe, R.; Skulason, H.; Pedersen, K.; Söderman, M.; Racadio, J.; Babic, D.; Gerdhem, P.; Edström, E. Feasibility and Accuracy of Thoracolumbar Minimally Invasive Pedicle Screw Placement With Augmented Reality Navigation Technology. Spine 2018, 43, 1018–1023. [Google Scholar] [CrossRef]
- Fotouhi, J.; Alexander, C.P.; Unberath, M.; Taylor, G.; Lee, S.C.; Fuerst, B.; Johnson, A.; Osgood, G.; Taylor, R.H.; Khanuja, H.; et al. Plan in 2-D, Execute in 3-D: An Augmented Reality Solution for Cup Placement in Total Hip Arthroplasty. J. Med. Imaging 2018, 5, 21205. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Auvinet, E.; Giles, J.; Rodriguez y Baena, F. Augmented Reality Based Navigation for Computer Assisted Hip Resurfacing: A Proof of Concept Study. Ann. Biomed. Eng. 2018, 46, 1595–1605. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Zhao, Z.; Zhang, B.; Jiang, W.; Fu, L.; Zhang, X.; Liao, H. Three-Dimensional Augmented Reality Surgical Navigation with Hybrid Optical and Electromagnetic Tracking for Distal Intramedullary Nail Interlocking. Int. J. Med. Robot. Comput. Assist. Surg. 2018, 14, e1909. [Google Scholar] [CrossRef]
- Ogawa, H.; Hasegawa, S.; Tsukada, S.; Matsubara, M. A Pilot Study of Augmented Reality Technology Applied to the Acetabular Cup Placement During Total Hip Arthroplasty. J. Arthroplast. 2018, 33, 1833–1837. [Google Scholar] [CrossRef]
- Turini, G.; Condino, S.; Parchi, P.D.; Viglialoro, M.R.; Piolanti, N.; Gesi, M.; Ferrari, M.; Ferrari, V. A Microsoft HoloLens Mixed Reality Surgical Simulator for Patient-Specific Hip Arthroplasty Training. In Proceedings of the 5th International Conference, AVR 2018, Otranto, Italy, 24–27 June 2018; pp. 201–210. [Google Scholar]
- van Duren, B.H.; Sugand, K.; Wescott, R.; Carrington, R.; Hart, A. Augmented Reality Fluoroscopy Simulation of the Guide-Wire Insertion in DHS Surgery: A Proof of Concept Study. Med. Eng. Phys. 2018, 55, 52–59. [Google Scholar] [CrossRef]
- Giachino, M.; Aprato, A.; Ulrich, L.; Revetria, T.A.; Tanzi, L.; Vezzetti, E.; Massè, A. Dynamic Evaluation of THA Components by Prosthesis Impingement Software (PIS). Acta Bio Med. Atenei Parm. 2021, 92, 2021295. [Google Scholar] [CrossRef]
- Mystakidis, S.; Christopoulos, A.; Pellas, N. A Systematic Mapping Review of Augmented Reality Applications to Support STEM Learning in Higher Education. Educ. Inf. Technol. 2022, 27, 1883–1927. [Google Scholar] [CrossRef]
- de Oliveira, M.E.; Debarba, H.G.; Lädermann, A.; Chagué, S.; Charbonnier, C.A. Hand-Eye Calibration Method for Augmented Reality Applied to Computer-Assisted Orthopedic Surgery. Rev. Chir. Orthop. Traumatol. 2019, 104, S110. [Google Scholar] [CrossRef]
- Sun, Q.; Mai, Y.; Yang, R.; Ji, T.; Jiang, X.; Chen, X. Fast and Accurate Online Calibration of Optical See-through Head-Mounted Display for AR-Based Surgical Navigation Using Microsoft HoloLens. Int. J. Comput. Assist. Radiol. Surg. 2020, 15, 1907–1919. [Google Scholar] [CrossRef]
- Andress, S.; Johnson, A.; Unberath, M.; Winkler, A.F.; Yu, K.; Fotouhi, J.; Weidert, S.; Osgood, G.; Navab, N. On-the-Fly Augmented Reality for Orthopedic Surgery Using a Multimodal Fiducial. J. Med. Imaging 2018, 5, 21209. [Google Scholar] [CrossRef]
- Ulrich, L.; Vezzetti, E.; Moos, S.; Marcolin, F. Analysis of RGB-D Camera Technologies for Supporting Different Facial Usage Scenarios. Multimed. Tools Appl. 2020, 79, 29375–29398. [Google Scholar] [CrossRef]
- Hajek, J.; Unberath, M.; Fotouhi, J.; Bier, B.; Lee, S.C.; Osgood, G.; Maier, A.; Armand, M.; Navab, N. Closing the Calibration Loop: An Inside-out-Tracking Paradigm for Augmented Reality in Orthopedic Surgery. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2018, Granada, Spain, 16–20 September 2018; pp. 299–306. [Google Scholar]
- HoloLens Research Mode—Mixed Reality Microsoft Docs. Available online: https://docs.microsoft.com/en-us/windows/mixed-reality/develop/advanced-concepts/research-mode (accessed on 10 March 2022).
- von der Heide, A.M.; Fallavollita, P.; Wang, L.; Sandner, P.; Navab, N.; Weidert, S.; Euler, E. Camera-Augmented Mobile C-Arm (CamC): A Feasibility Study of Augmented Reality Imaging in the Operating Room. Int. J. Med. Robot. Comput. Assist. Surg. 2018, 14, e1885. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Authors | Publication Year | Purpose | Category | Visualization Tool |
|---|---|---|---|---|
| Ackermann et al. [24] | 2021 | Intraoperative | Tumor | HMD 1 (HoloLens) |
| Charles et al. [25] | 2021 | Intraoperative | Spine | PC Monitor |
| Chen et al. [26] | 2021 | Intraoperative | Knee | 3D display |
| Condino et al. [27] | 2021 | Training | Spine | PC Monitor |
| Dennler et al. [28] | 2021 | Intraoperative | Spine | HMD (HoloLens) |
| Dennler et al. [29] | 2021 | Intraoperative | Spine | HMD (HoloLens) |
| Fucentese et al. [30] | 2021 | Intraoperative | Knee | HMD (HoloLens) |
| Gu et al. [31] | 2021 | Intraoperative | Shoulder | HMD (HoloLens) |
| Hu et al. [32] | 2021 | Intraoperative | Femur | HMD (HoloLens) |
| Kriechling et al. [33] | 2021 | Intraoperative | Shoulder | HMD (HoloLens) |
| Kriechling et al. [34] | 2021 | Intraoperative | Shoulder | HMD (HoloLens) |
| Li et al. [35] | 2021 | Intraoperative | Spine | HMD |
| Molina et al. [36] | 2021 | Intraoperative | Tumor | HMD |
| Moreta-Martinez et al. [37] | 2021 | Intraoperative | Tumor | Smartphone |
| Schlueter-Brust et al. [38] | 2021 | Intraoperative | Shoulder | HMD (HoloLens) |
| Tsukada et al. [39] | 2021 | Intraoperative | Hip | Smartphone |
| Tsukada et al. [40] | 2021 | Intraoperative | Knee | Smartphone |
| Tu et al. [41] | 2021 | Intraoperative | Lower limb | HMD (HoloLens) |
| Veloso et al. [42] | 2021 | Training | Hip | HMD (HoloLens) |
| von Atzigen et al. [43] | 2021 | Intraoperative | Spine | HMD (HoloLens) |
| Yahanda et al. [44] | 2021 | Intraoperative | Spine | HMD |
| Yamamoto et al. [45] | 2021 | Intraoperative | Elbow | PC Monitor |
| Yanni et al. [46] | 2021 | Intraoperative | Spine | HMD |
| Alexander et al. [47] | 2020 | Intraoperative | Hip | PC Monitor |
| Auloge et al. [48] | 2020 | Intraoperative | Spine | PC Monitor |
| Burström et al. [49] | 2020 | Intraoperative | Spine | PC Monitor |
| Carl et al. [50] | 2020 | Intraoperative | Spine | HUD 2 |
| Dennler et al. [51] | 2020 | Intraoperative | Spine | HMD (HoloLens) |
| Edström et al. [52] | 2020 | Intraoperative | Spine | PC Monitor |
| Edström et al. [53] | 2020 | Intraoperative | Spine | PC Monitor |
| Elmi-Terander et al. [54] | 2020 | Intraoperative | Spine | PC Monitor |
| Molina et al. [55] | 2020 | Intraoperative | Spine | HMD |
| Müller et al. [56] | 2020 | Intraoperative | Spine | HMD (HoloLens) |
| Ogawa et al. [57] | 2020 | Intraoperative | Hip | Smartphone |
| Peh et al. [58] | 2020 | Intraoperative | Spine | PC Monitor |
| Burström et al. [59] | 2019 | Intraoperative | Spine | PC Monitor |
| Carl et al. [60] | 2019 | Intraoperative | Spine | HUD |
| Carl et al. [61] | 2019 | Intraoperative | Spine | HUD |
| Condino et al. [62] | 2019 | Rehabilitation | Shoulder | HMD (HoloLens) |
| Elmi-Terander et al. [63] | 2019 | Intraoperative | Spine | PC Monitor |
| Gibby et al. [64] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Lei et al. [65] | 2019 | Intraoperative | Hip | HMD (HoloLens) |
| Liebmann et al. [66] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Liu et al. [67] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Logishetty et al. [68] | 2019 | Training | Hip | HMD (HoloLens) |
| Molina et al. [69] | 2019 | Intraoperative | Spine | HMD |
| Pokhrel et al. [70] | 2019 | Intraoperative | Knee | PC Monitor |
| Tsukada et al. [71] | 2019 | Intraoperative | Knee | Smartphone |
| Urakov et al. [72] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Wanivenhaus et al. [73] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Wei et al. [74] | 2019 | Intraoperative | Spine | HMD (HoloLens) |
| Agten et al. [75] | 2018 | Intraoperative | Spine | HMD (HoloLens) |
| Cho et al. [76] | 2018 | Intraoperative | Tumor | Tablet |
| Condino et al. [77] | 2018 | Training | Hip | HMD (HoloLens) |
| Deib et al. [78] | 2018 | Intraoperative | Spine | HMD (HoloLens) |
| Elmi-Terander et al. [79] | 2018 | Intraoperative | Spine | PC Monitor |
| Fotohui et al. [80] | 2018 | Intraoperative | Hip | PC Monitor |
| Liu et al. [81] | 2018 | Intraoperative | Hip | HMD (HoloLens) |
| Ma et al. [82] | 2018 | Intraoperative | Tibia | PC Monitor |
| Ogawa et al. [83] | 2018 | Intraoperative | Hip | Smartphone |
| Turini et al. [84] | 2018 | Training | Hip | HMD (HoloLens) |
| Van Duren et al. [85] | 2018 | Training | Hip | PC Monitor |
| Purpose | Features | Outcomes |
|---|---|---|
| Training | Hybrid environment simulators that recreate surgical conditions using AR display and phantoms, 3D models, and surgical instruments | Trainees are provided guidance and advanced visualization; surgical simulation can be repeated multiple times in a safe and controlled environment; live feedback is obtained |
| Rehabilitation | AR-based platforms that involve controlled, user-specific environmental and perceptual stimuli to achieve functional recovery, improve range of motion, reach patient autonomy | Patient activity is constantly monitored; real-time feedback is obtained; tasks are engaging and motivating |
| Intraoperative | AR-based applications or surgical navigation systems that project virtual additional information and images directly on the site of intervention, giving the surgeon improved sensory perception | Optimized visualization and better understanding of spatial relationship between surgical instrument and anatomical structures is achieved; surgery time and radiation exposure are decreased |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Innocente, C.; Ulrich, L.; Moos, S.; Vezzetti, E. Augmented Reality: Mapping Methods and Tools for Enhancing the Human Role in Healthcare HMI. Appl. Sci. 2022, 12, 4295. https://doi.org/10.3390/app12094295
Innocente C, Ulrich L, Moos S, Vezzetti E. Augmented Reality: Mapping Methods and Tools for Enhancing the Human Role in Healthcare HMI. Applied Sciences. 2022; 12(9):4295. https://doi.org/10.3390/app12094295
Chicago/Turabian StyleInnocente, Chiara, Luca Ulrich, Sandro Moos, and Enrico Vezzetti. 2022. "Augmented Reality: Mapping Methods and Tools for Enhancing the Human Role in Healthcare HMI" Applied Sciences 12, no. 9: 4295. https://doi.org/10.3390/app12094295
APA StyleInnocente, C., Ulrich, L., Moos, S., & Vezzetti, E. (2022). Augmented Reality: Mapping Methods and Tools for Enhancing the Human Role in Healthcare HMI. Applied Sciences, 12(9), 4295. https://doi.org/10.3390/app12094295