
Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations




Abstract
:Featured Application
Abstract
1. Introduction
1.1. Literature Review
1.2. Research Gaps
1.3. Contributions
- Proposing EV power profiles, which are based on the EV users’ interaction with the human-machine interface (HMI);
- Proposing a new method of real-time power management, including energy cost and PV energy optimization for the IIREVs considering the intermittent and random arrival of EVs, where the optimization is performed at each EV arrival;
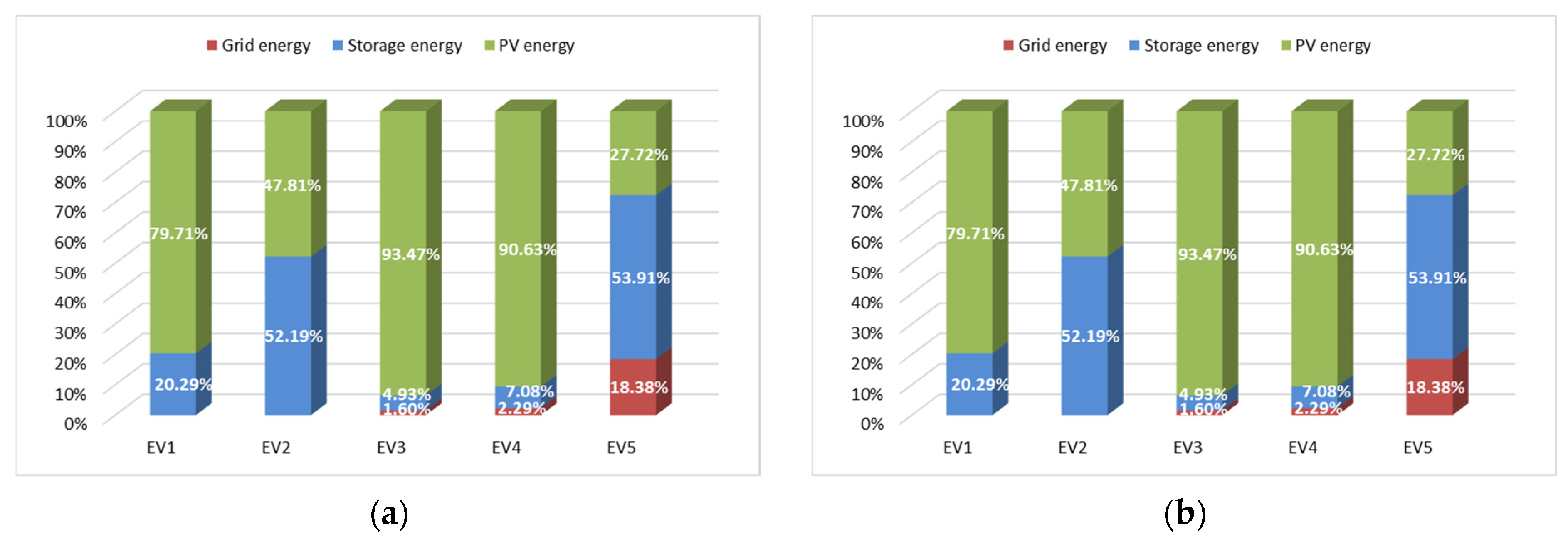
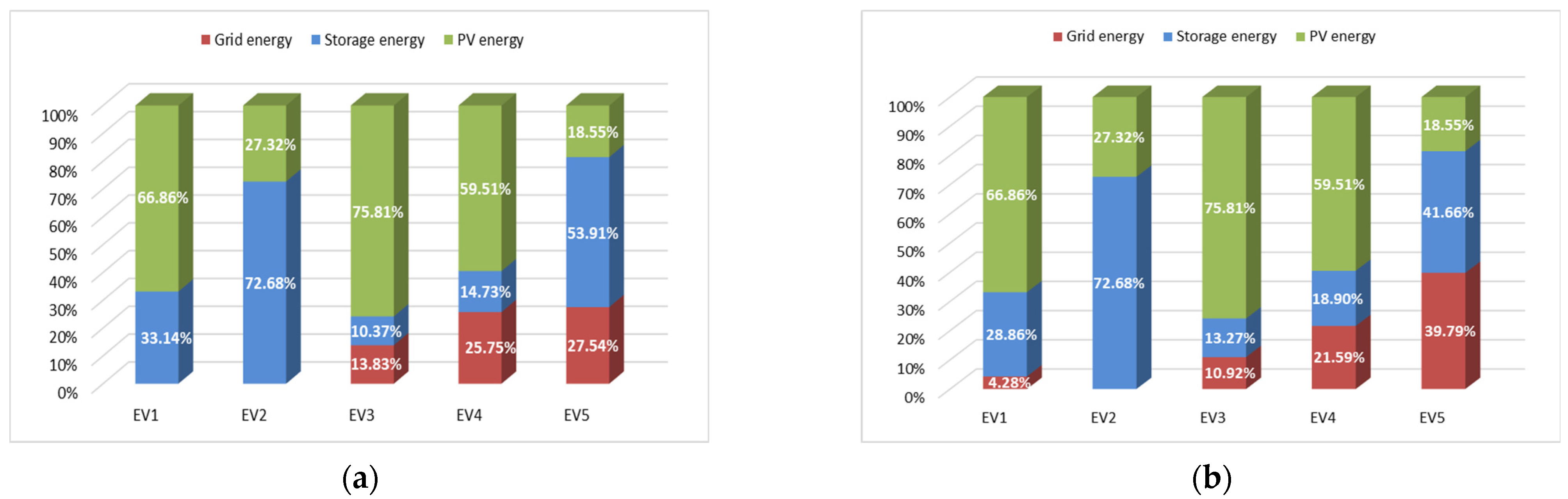
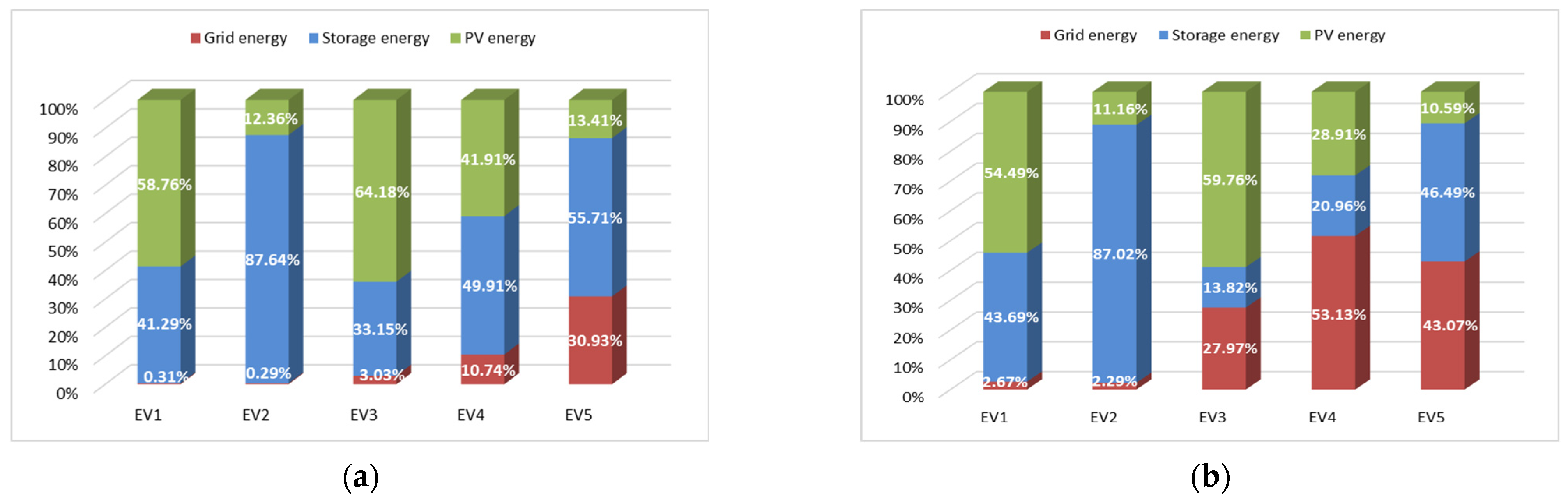
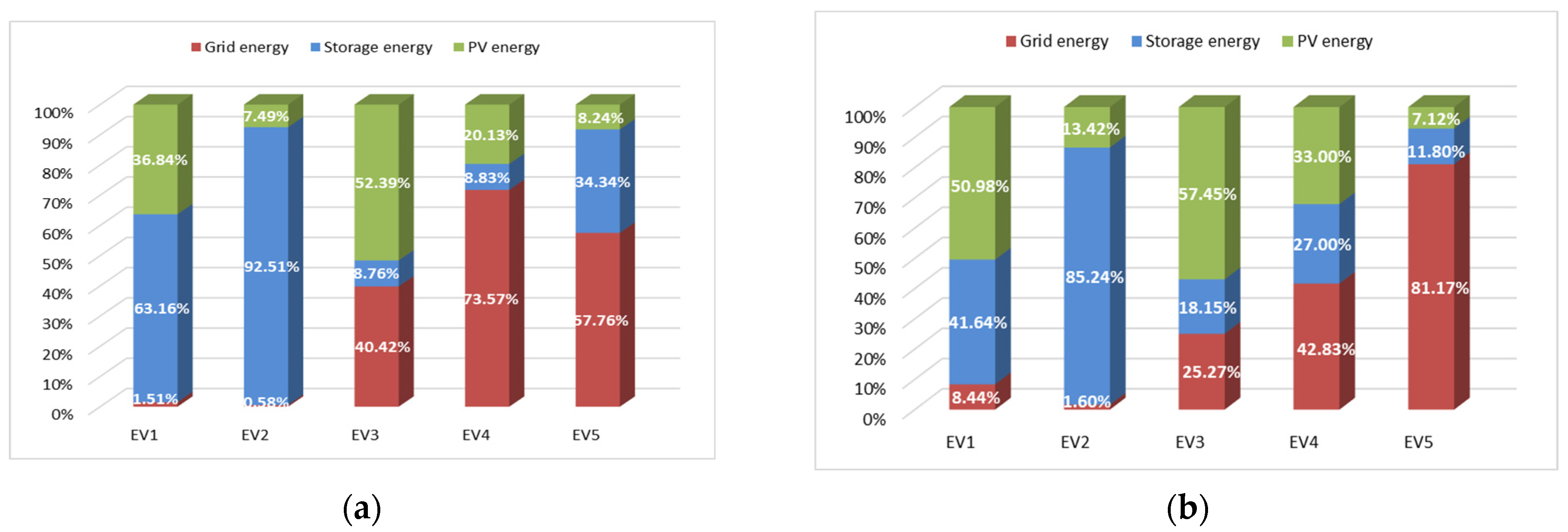
- The analysis of the energy distribution by source category for EV charging and the entire station energy system;
- The validation of the proposed control in simulation and real-time experimental tests in different meteorological conditions and random EV power profiles.
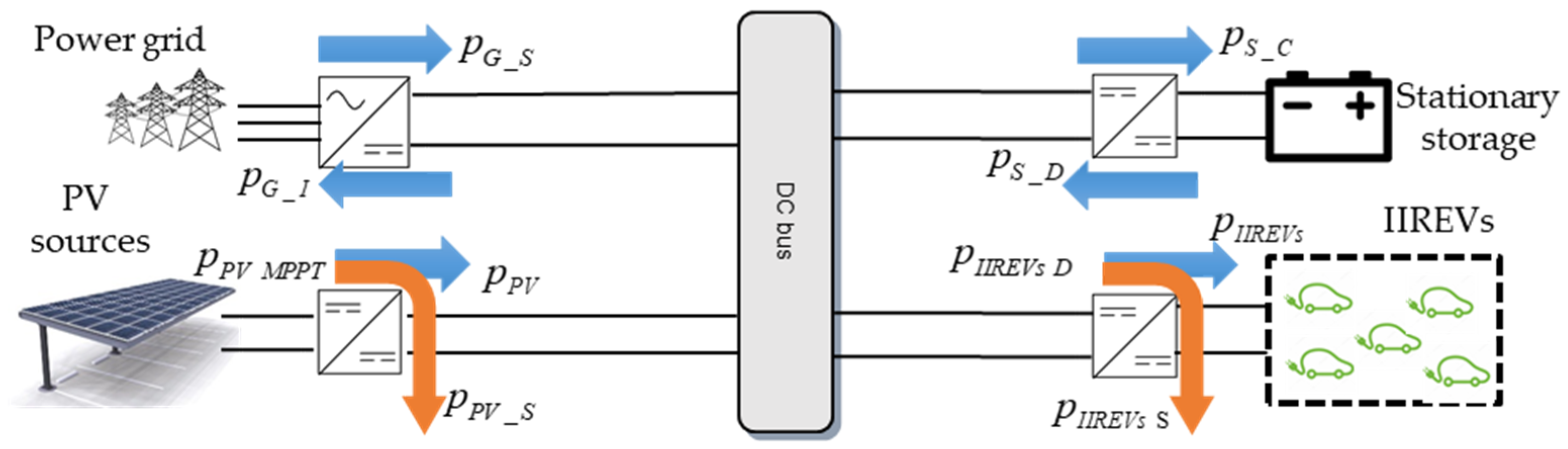
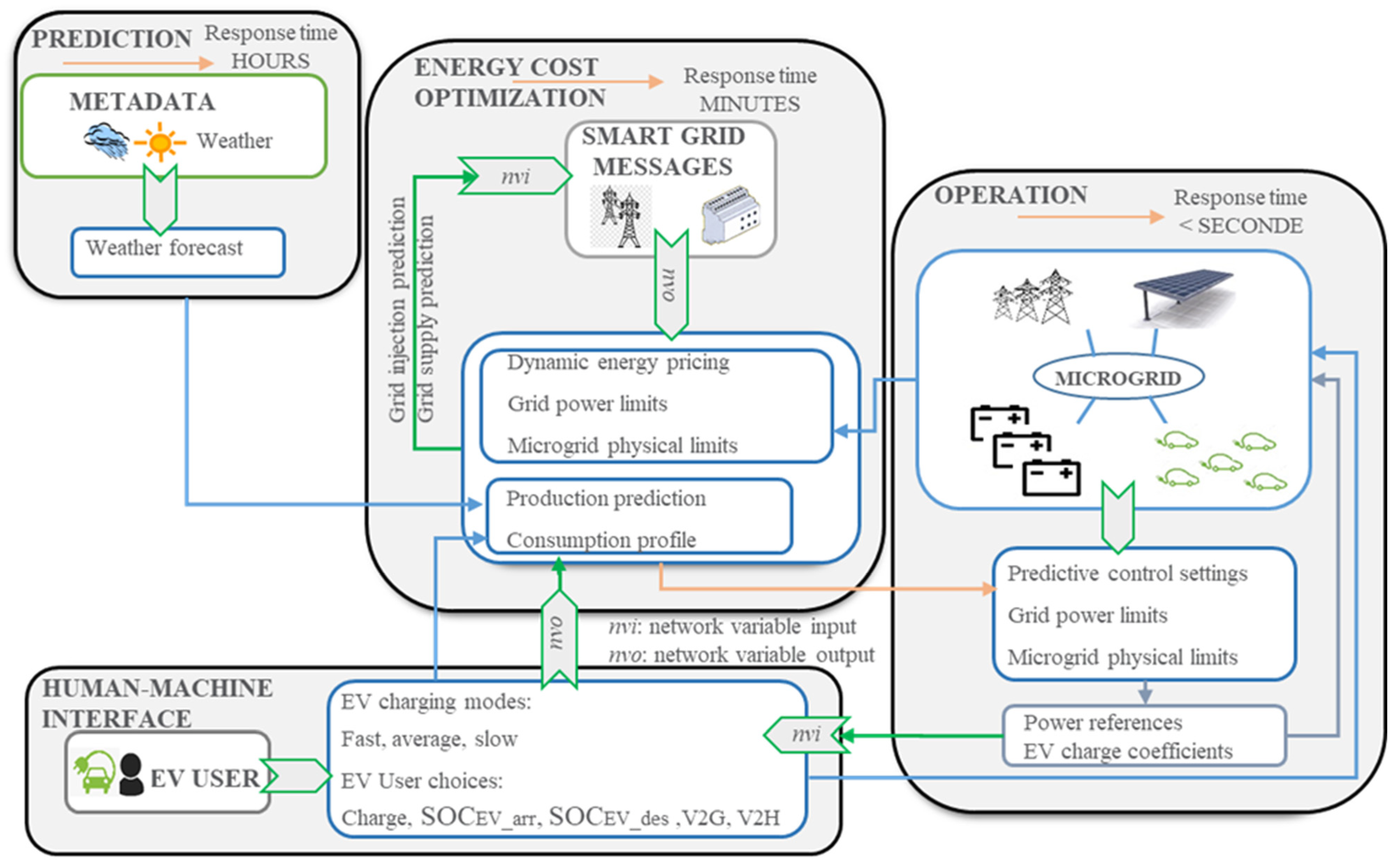
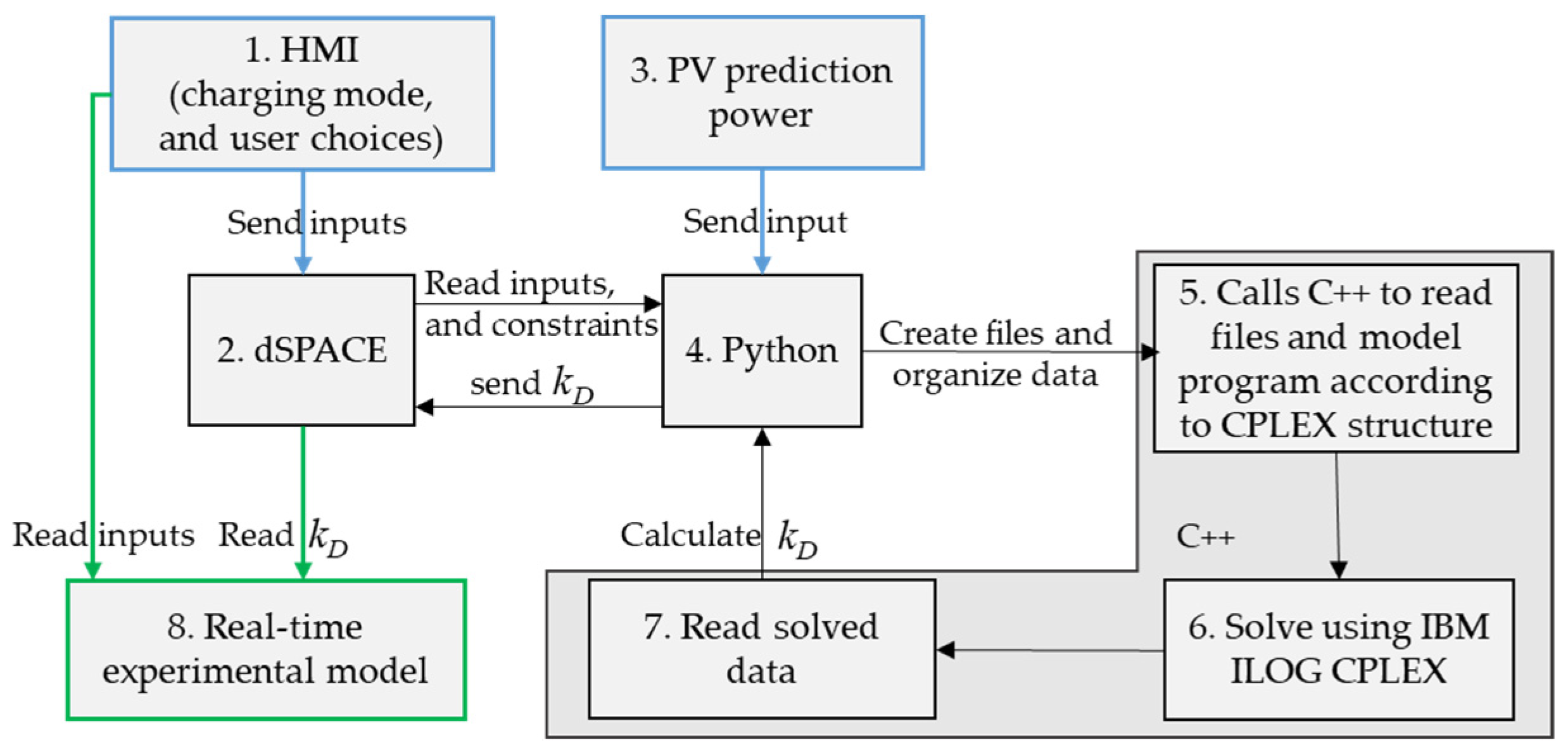
2. Supervisory and Control System Based on Real-Time Power Management
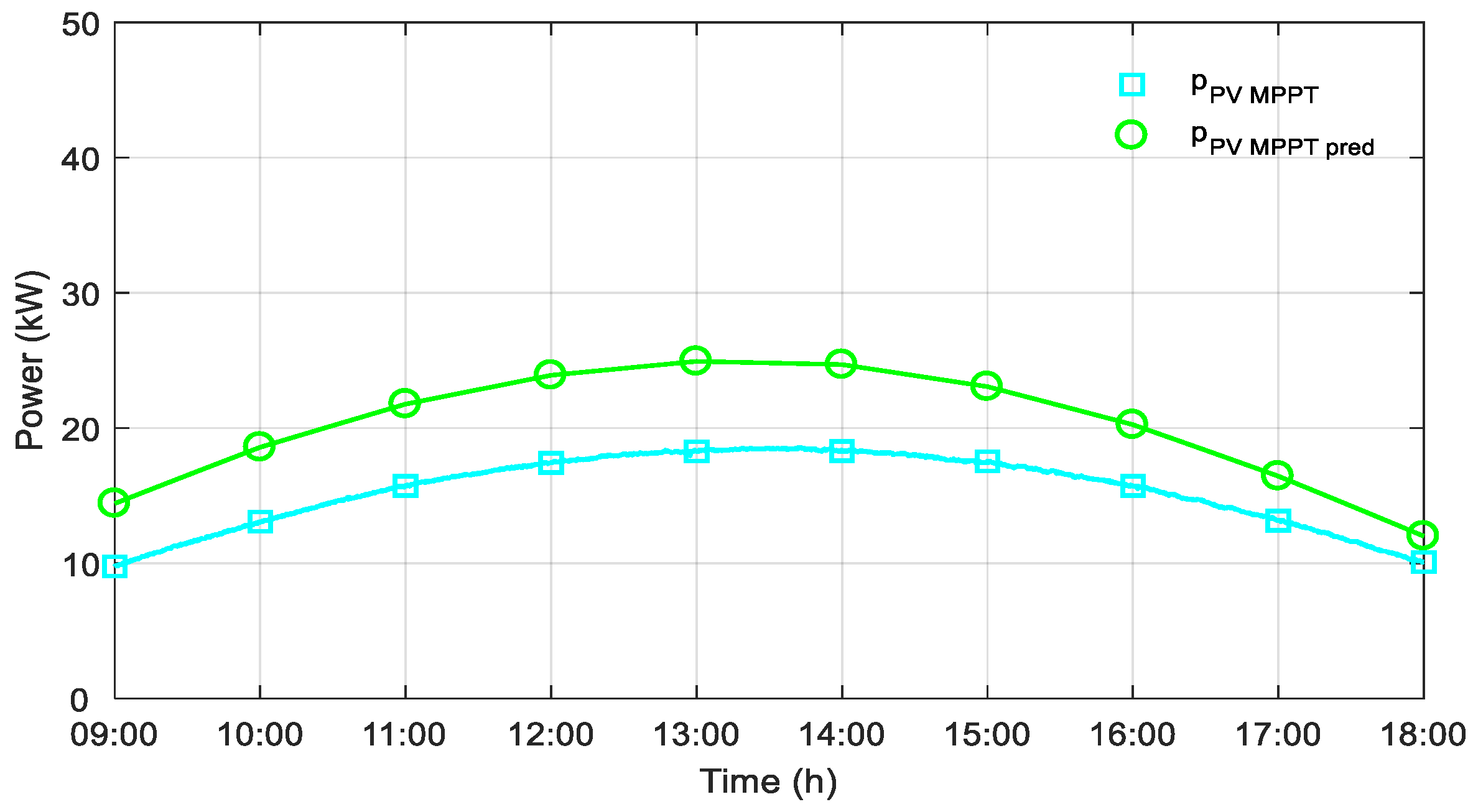
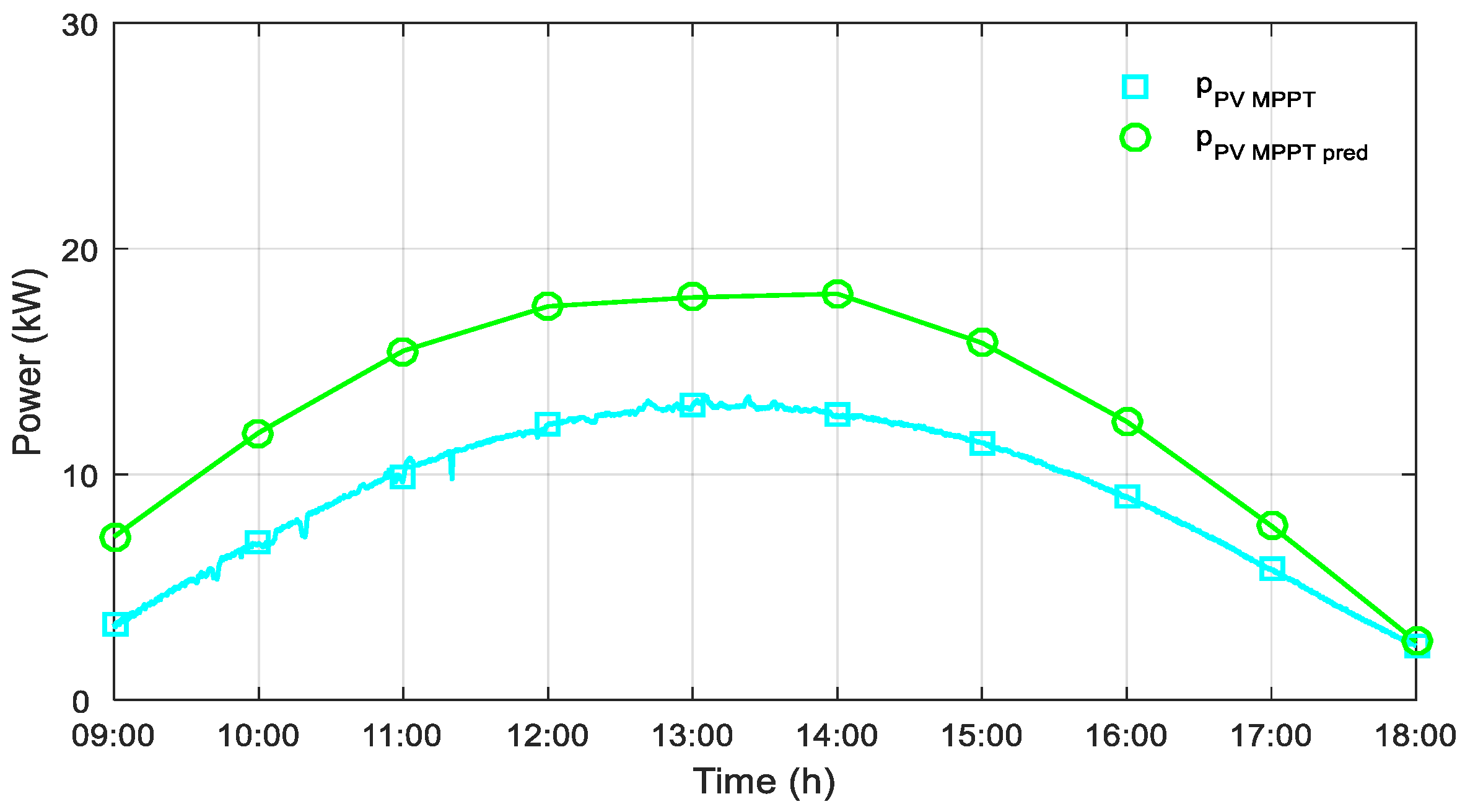
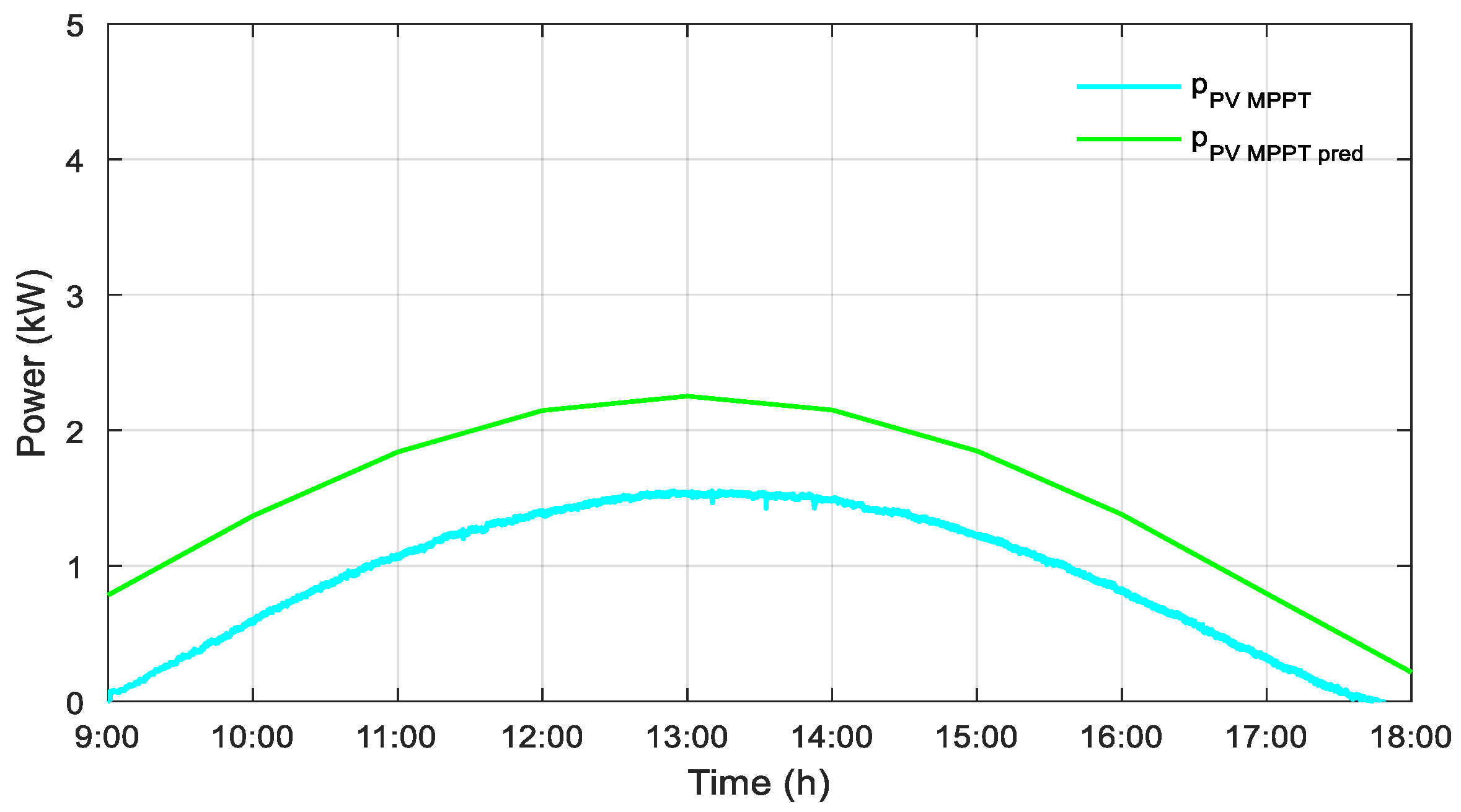
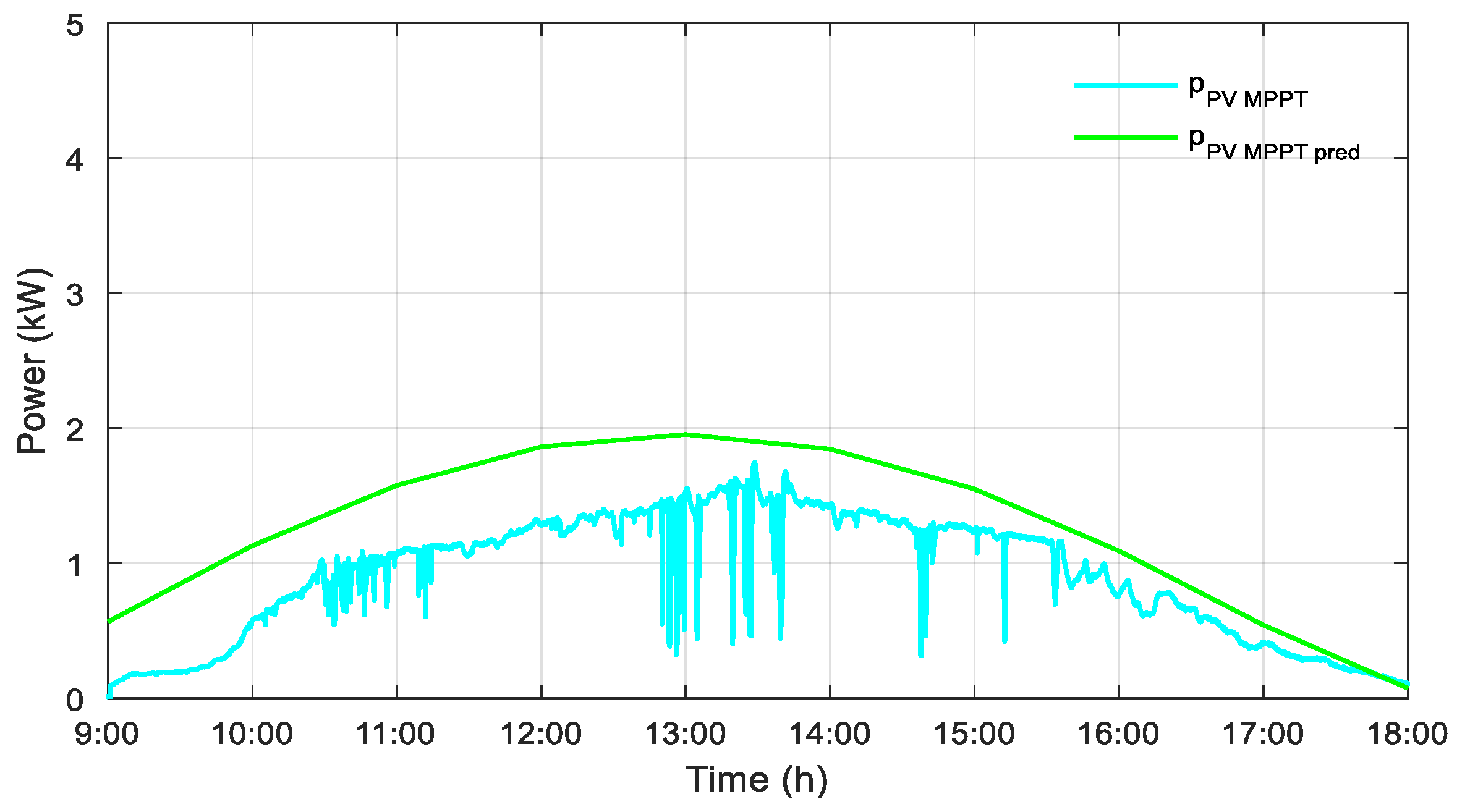
2.1. Prediction Layer
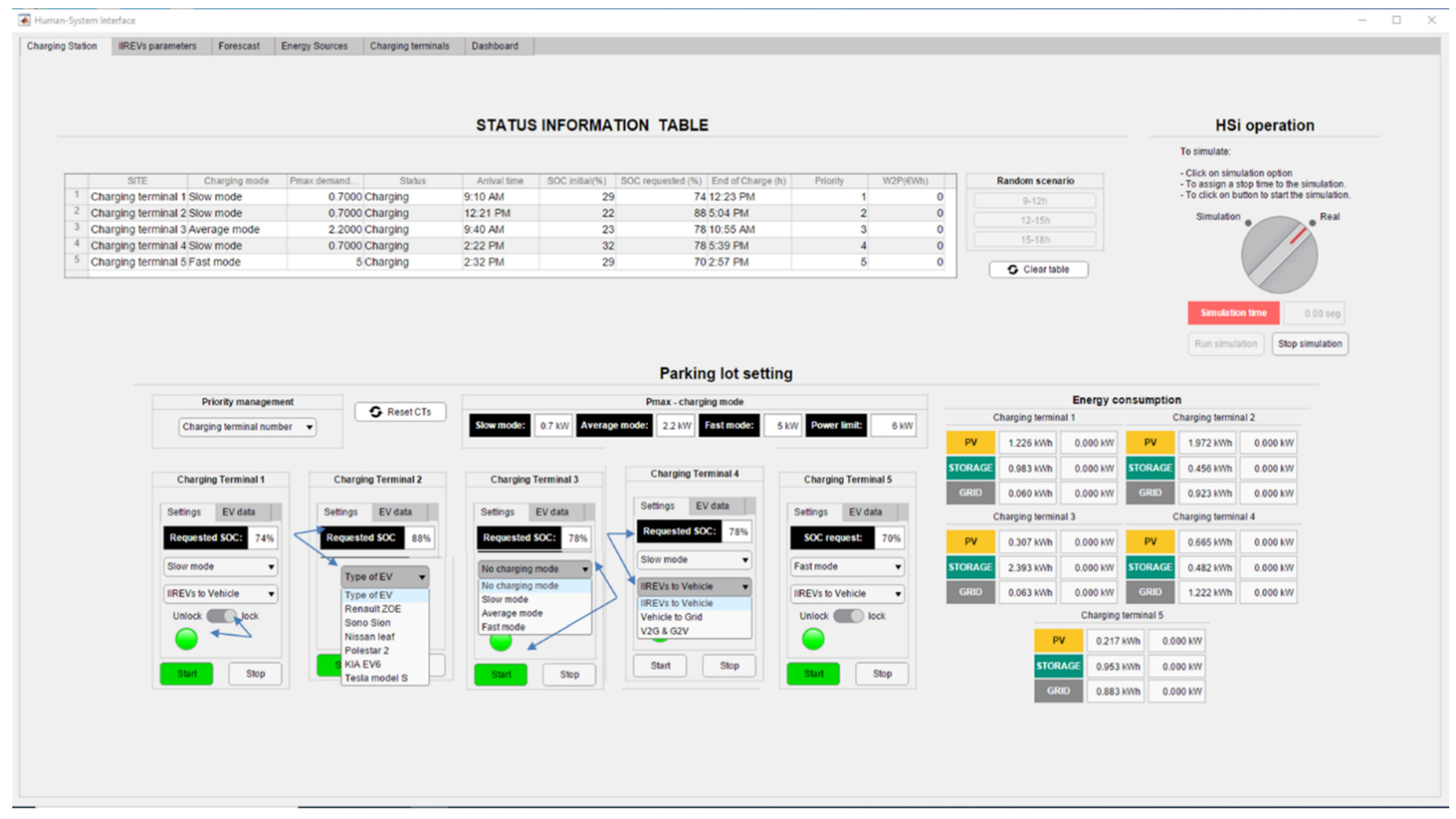
2.2. Human-Machine Interface
2.3. Energy Cost Optimization
2.3.1. PV Sources
2.3.2. Stationary Storage
2.3.3. Grid Connection
2.3.4. Electric Vehicles
- (a)
- EV charging mode:where v is the index of the EV, is the EV charging power of v vehicle, and are the arrival and departure time of v vehicle, respectively, and is the total number of EVs.
- (b)
- Total EV charging power:
- (c)
- EV state of charge:where is the state of charge of v vehicle, , , and are the minimum, maximum, and departure state of charge of v vehicle, respectively;
- (d)
- Acceptance criteria:
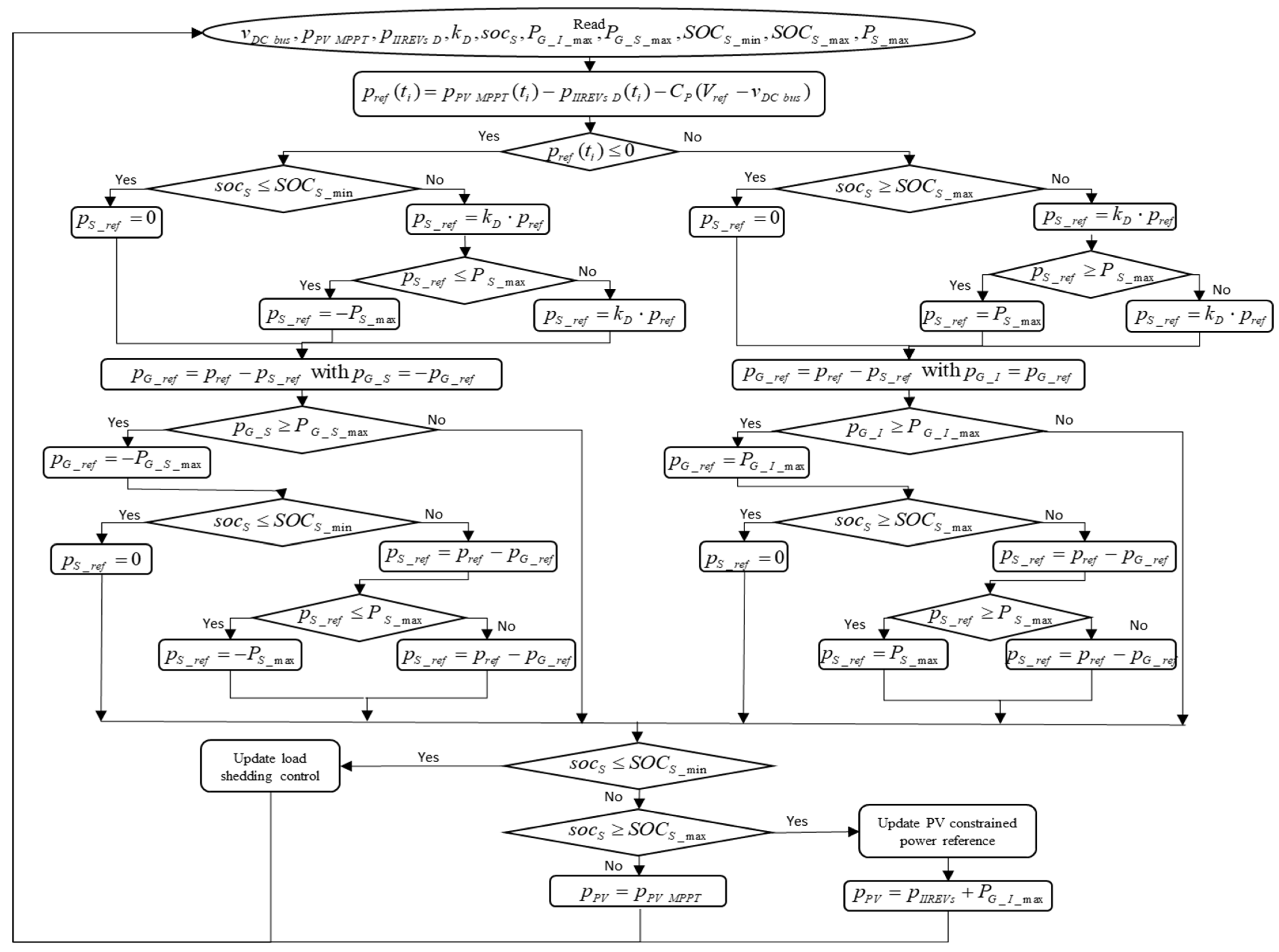
2.3.5. Power Balancing
2.3.6. Objective Function
2.4. Operation Layer
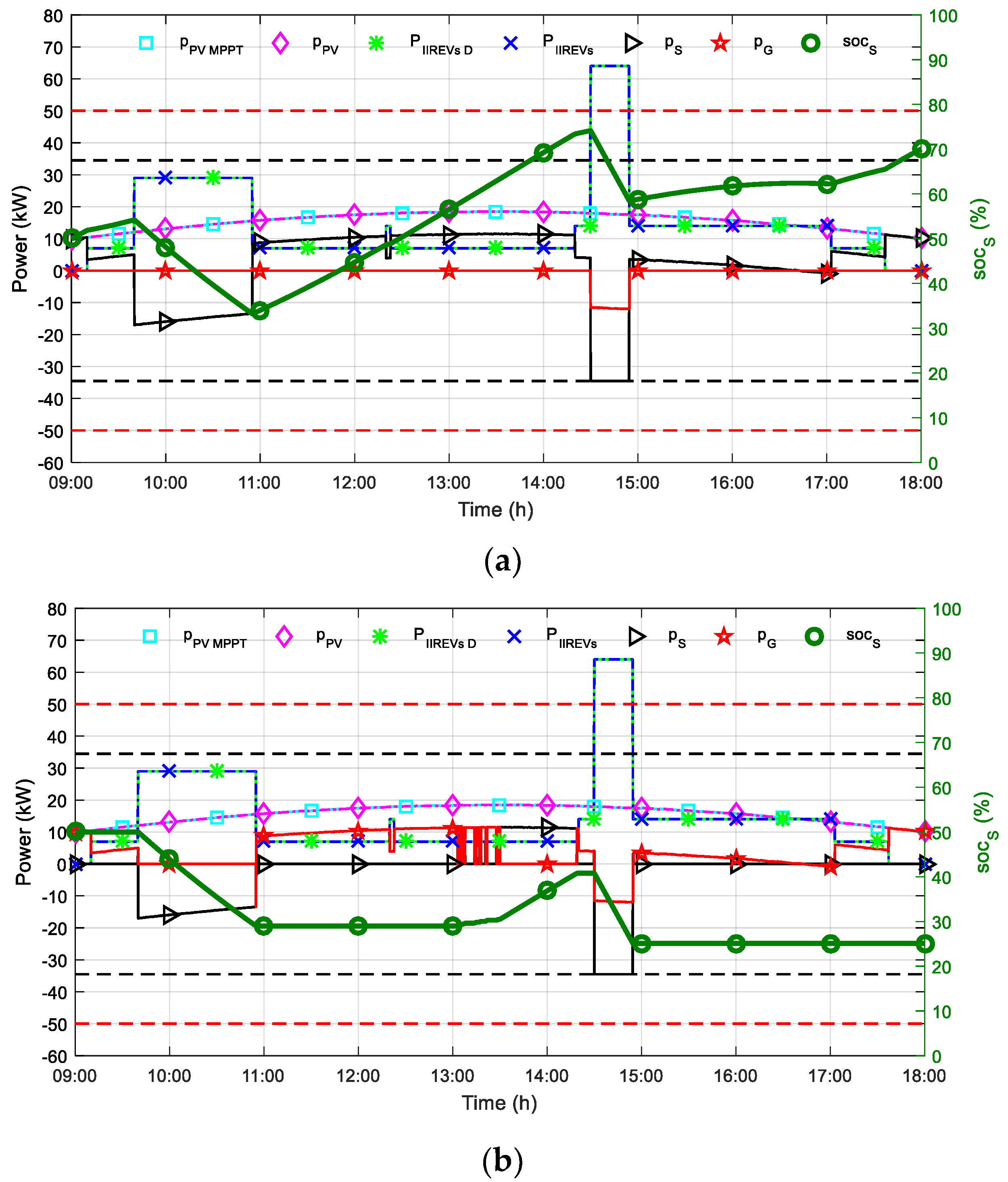
3. Simulation Results and Analyses
3.1. Case 1—High Irradiation Profile without Fluctuations
3.2. Case 2—Low Irradiation Profile without Fluctuations
3.3. Case 3—High Irradiation Profile with High Fluctuations
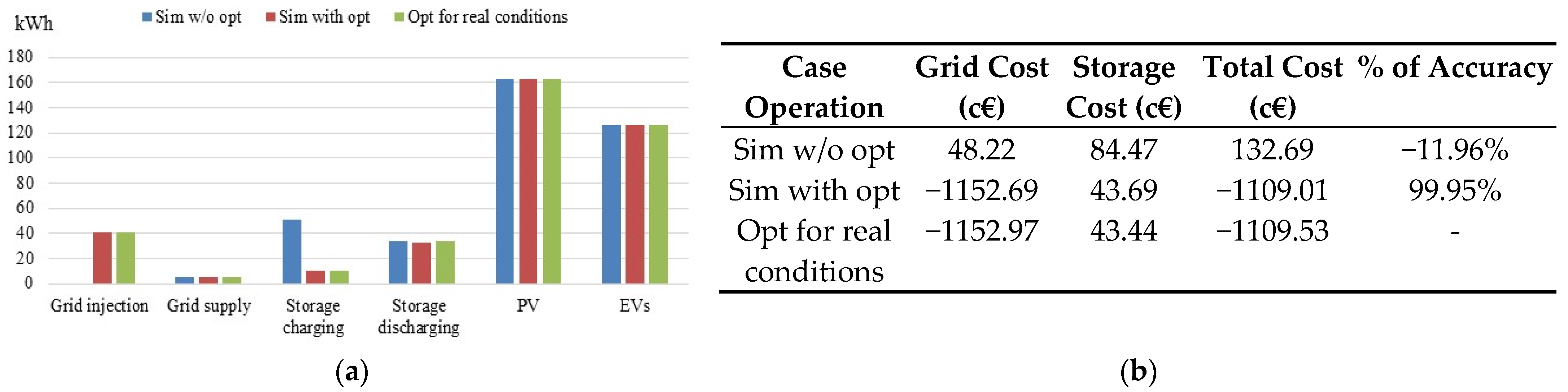
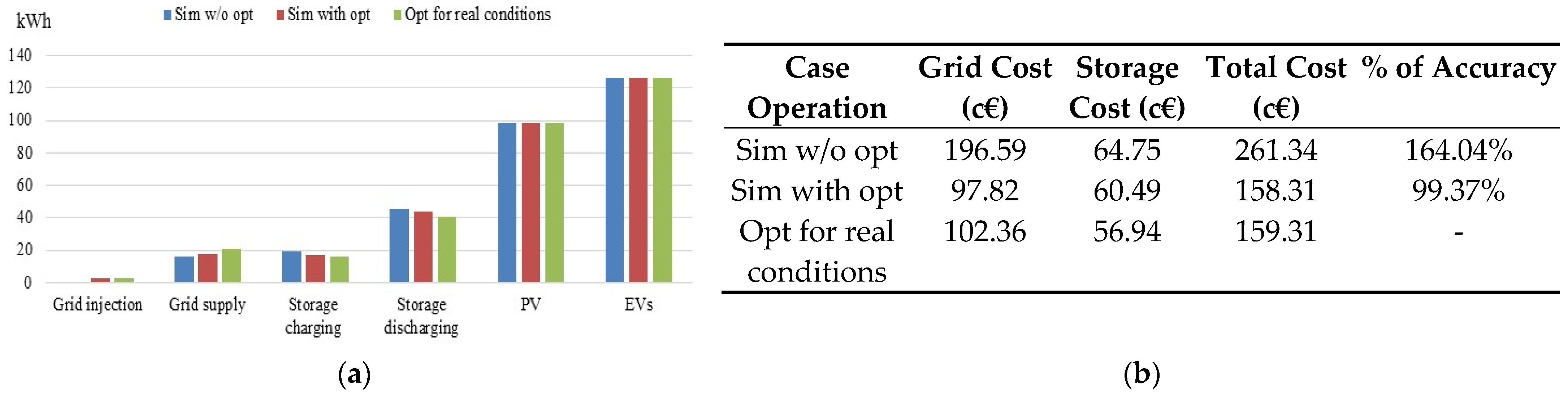
3.4. Discussion
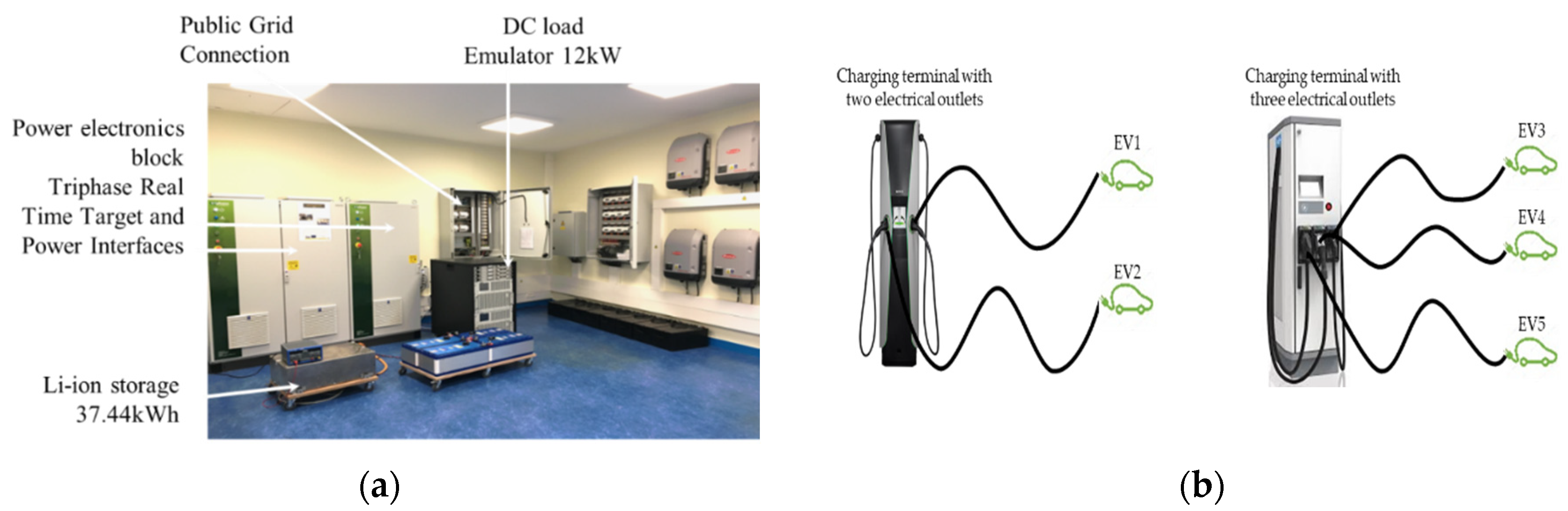
4. Real-Time Experimental Tests
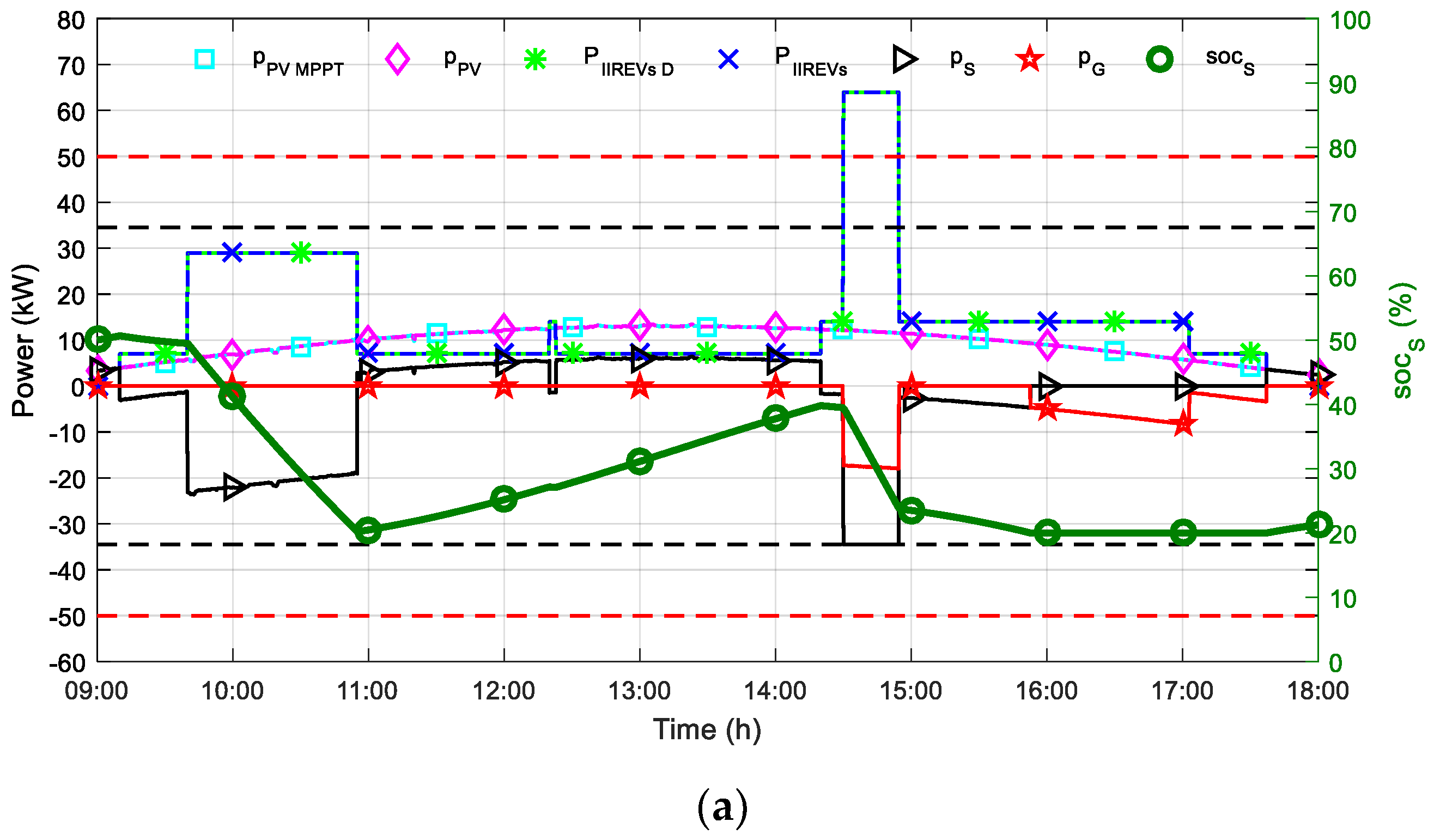
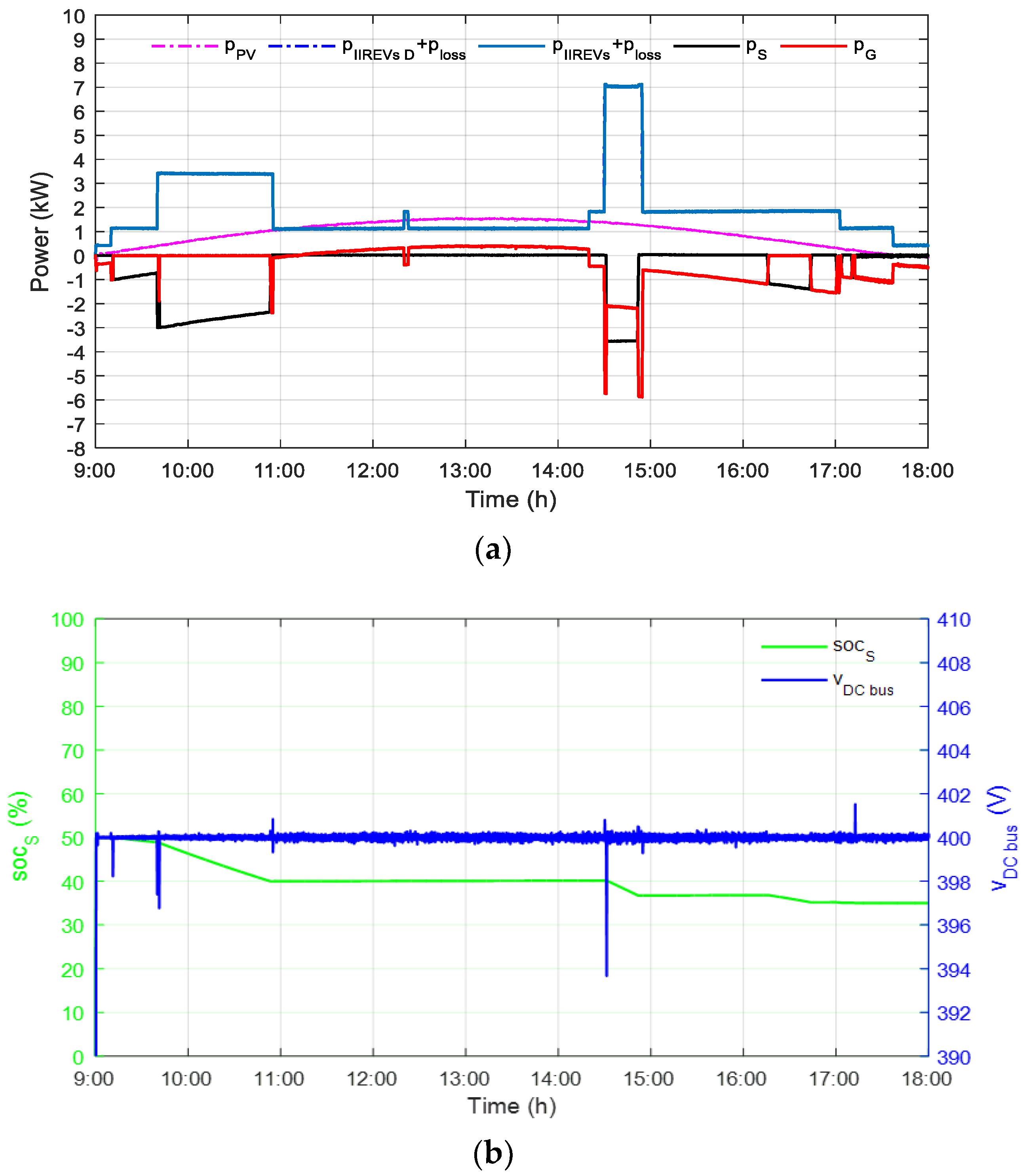
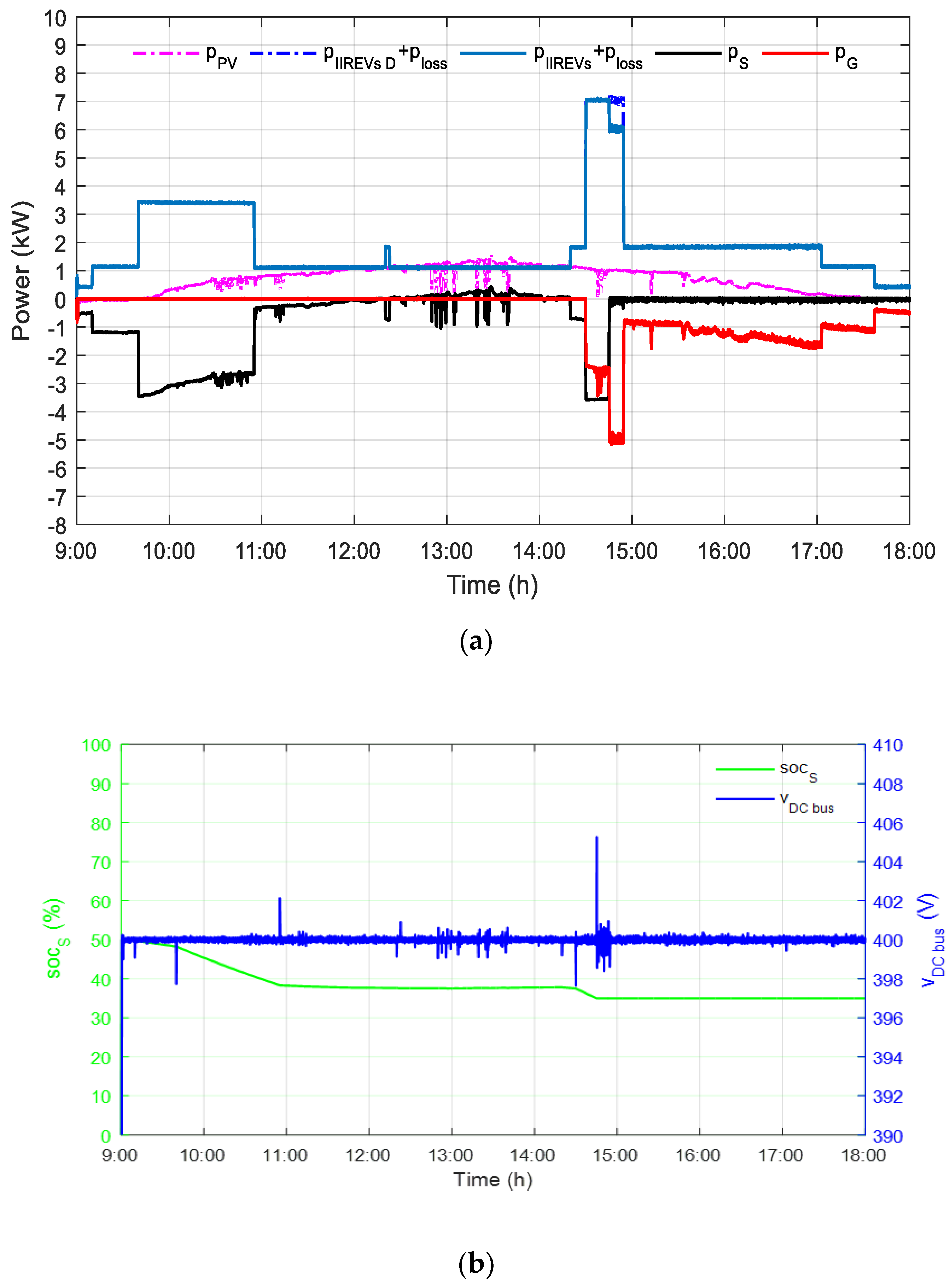
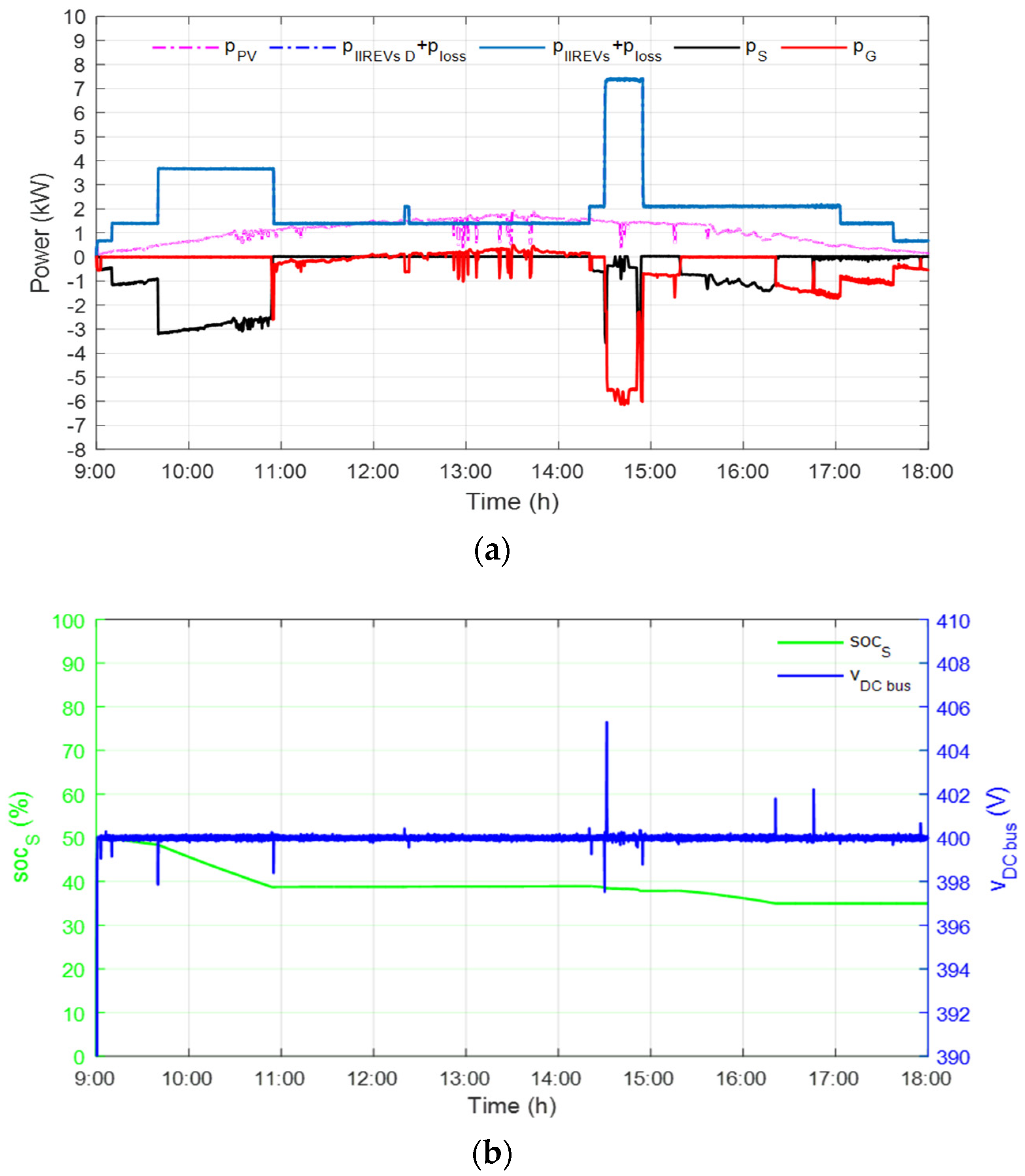
4.1. Experiemntal Test 1
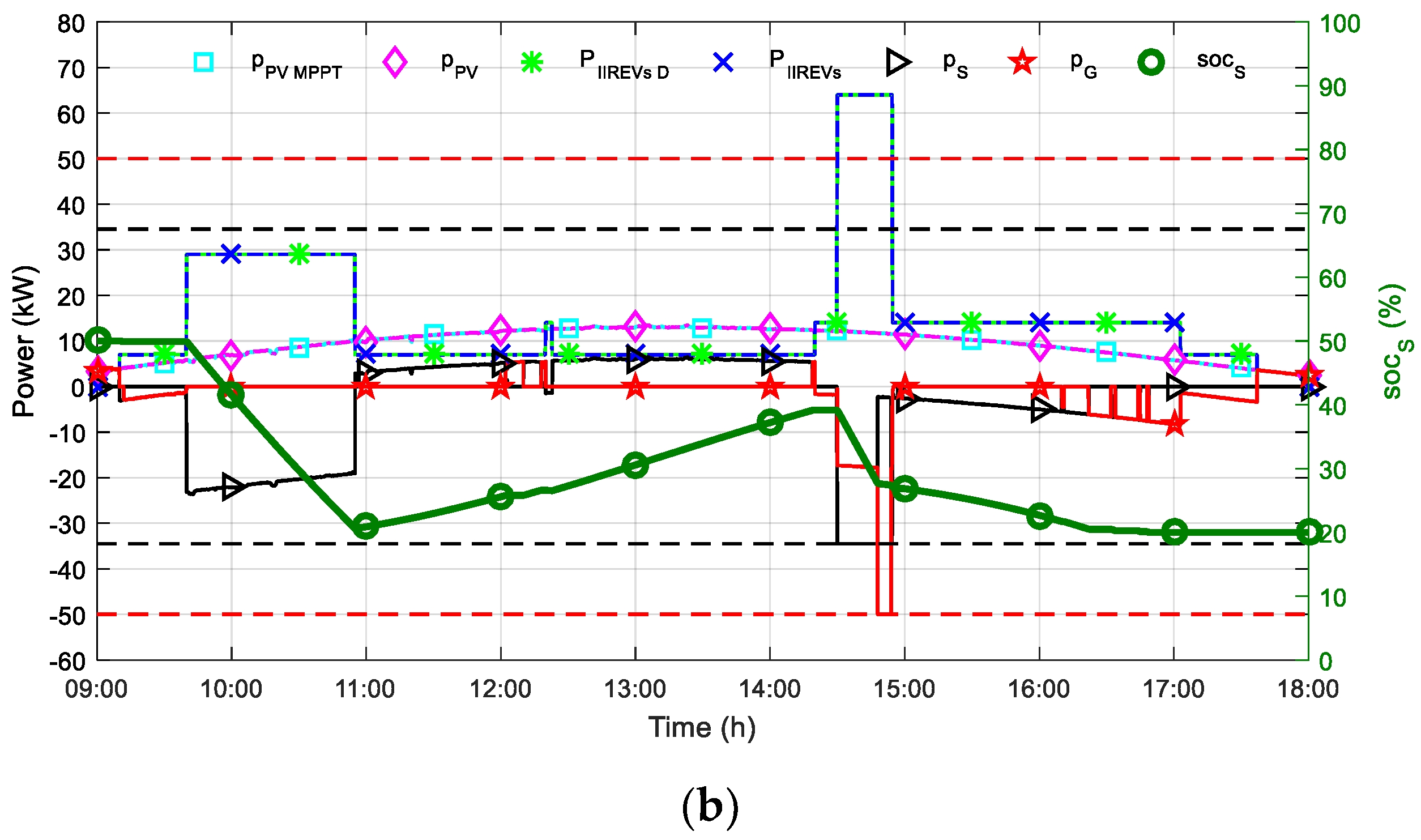
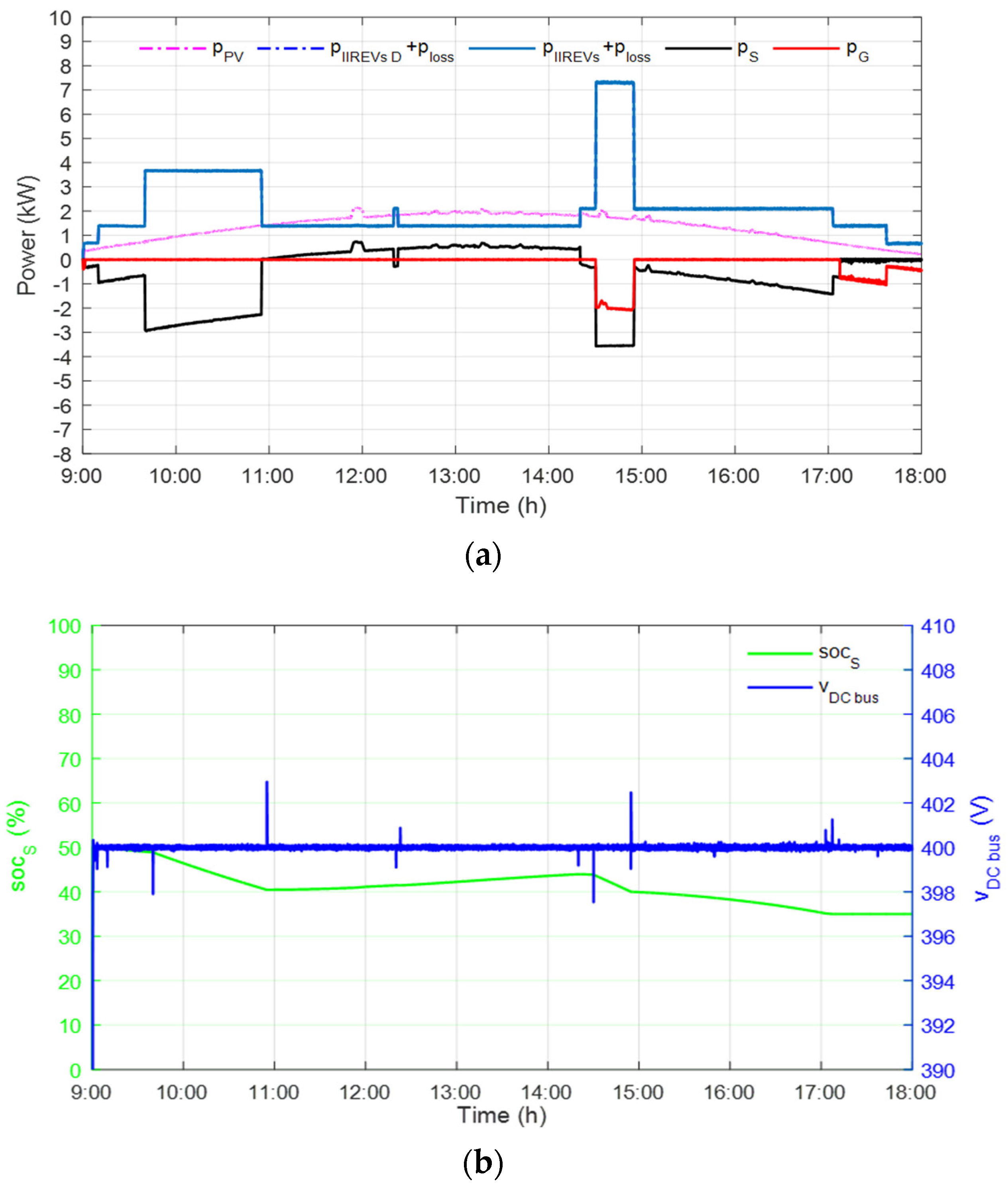
4.2. Experimental Test 2
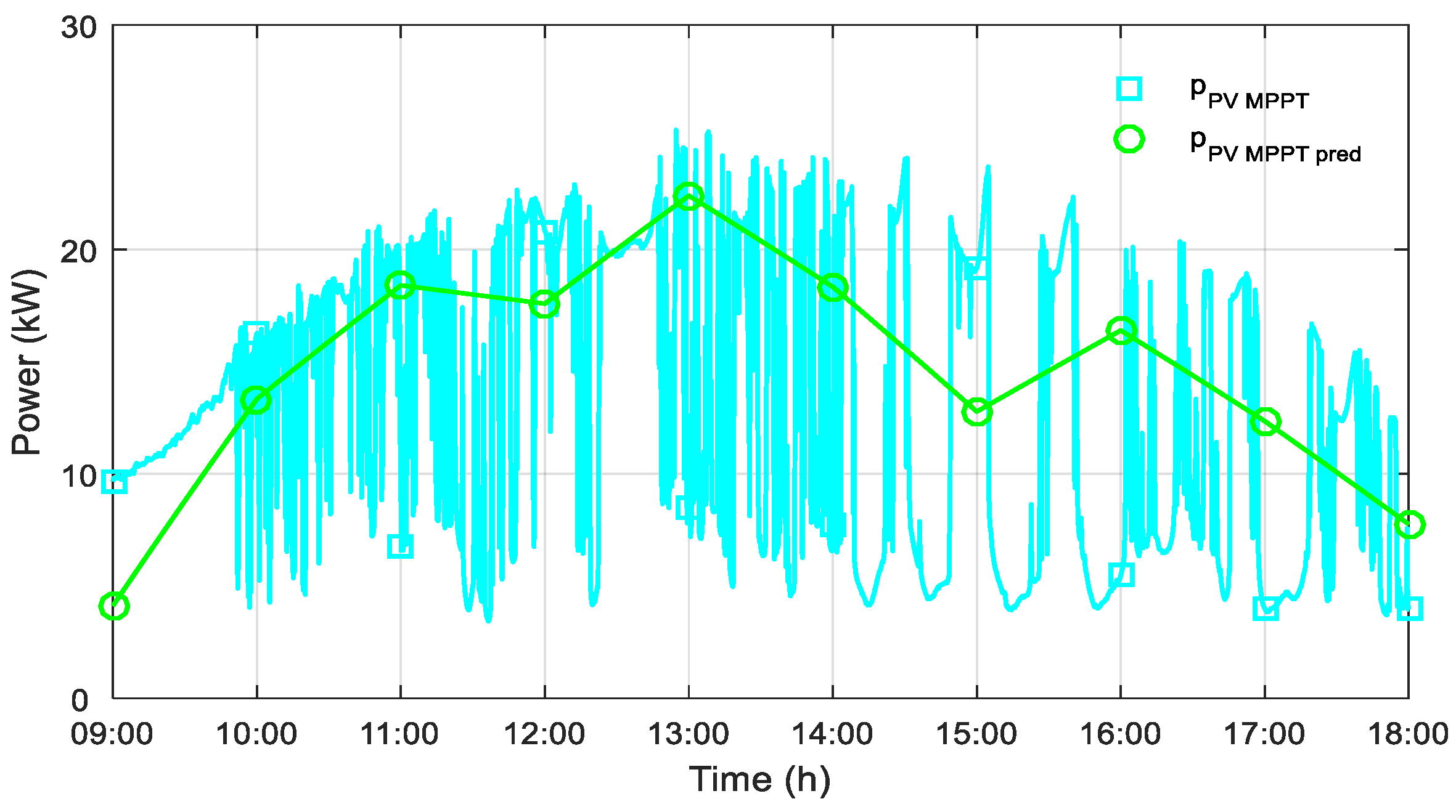
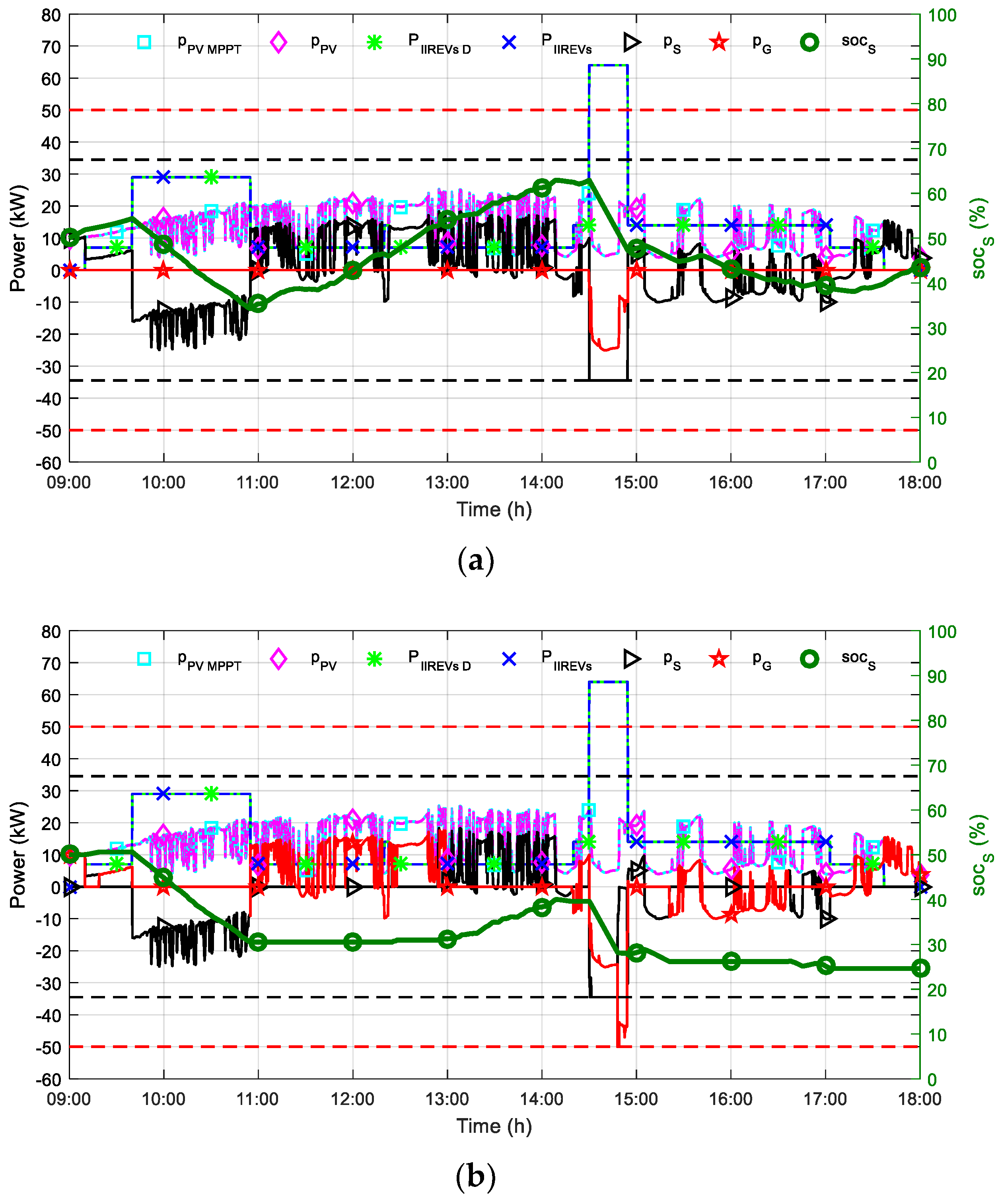
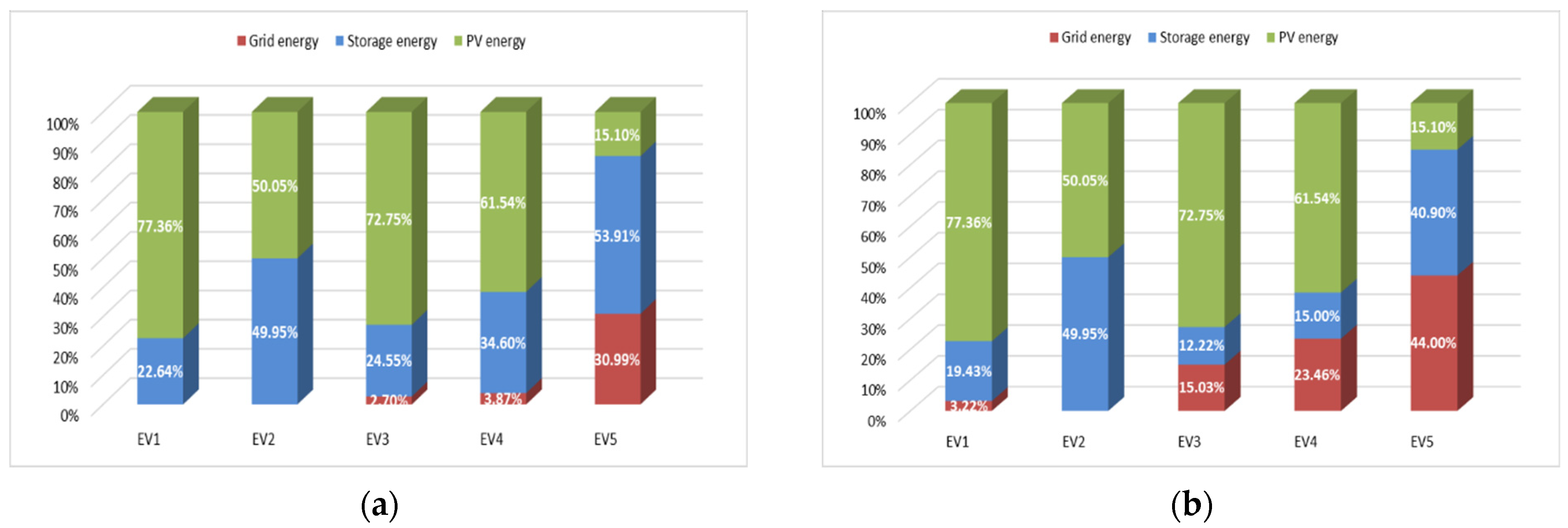
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| AC | Alternative current |
| CO2 | Carbon dioxide |
| DC | Direct current |
| EV | Electric vehicle |
| HMI | Human-machine interface |
| IIREVs | Intelligent infrastructure for recharging electric vehicles |
| MPPT | Maximum power point tracking |
| MILP | Mixed-integer linear programming |
| PV | Photovoltaic |
| SOC | State of charge |
| STC | Standard test conditions |
| Constraints | |
| Maximum charging power of v vehicle | |
| Maximum average charging power | |
| Maximum fast charging power | |
| Maximum slow charging power | |
| Stationary storage power limit | |
| Maximum grid injection limit | |
| Maximum grid supply limit | |
| Maximum state of charge of electric vehicle | |
| Minimum state of charge of electric vehicle | |
| Maximum state of charge of stationary storage | |
| Minimum state of charge of stationary storage | |
| Parameters | |
| Time interval between two samples | |
| Power temperature coefficient | |
| EV penalty tariff | |
| Grid energy tariff | |
| Grid energy tariff in normal hours | |
| Grid energy tariff in peak hours | |
| Storage energy tariff | |
| PV shedding energy tariff | |
| Controller proportional gain | |
| Energy capacity of the stationary storage (kWh) | |
| Energy capacity of the v vehicle (kWh) | |
| Fixed solar irradiation for testing | |
| Charging mode of vehicle v | |
| Number of PV panels | |
| EVs total number | |
| Nominal Operating Cell Temperature | |
| PV power under STC | |
| SOC of vehicle v at arrival | |
| State of charge of electric vehicle v at departure | |
| SOC of vehicle v at departure | |
| Initial SOC of stationary storage | |
| Initial time instant | |
| Fixed air temperature | |
| Arrival time of v vehicle | |
| Estimated charging time of v vehicle set by the user | |
| Departure time of v vehicle | |
| Estimated charging time of vehicle v | |
| Time instant at the end of time operation | |
| Reference voltage of the DC bus | |
| Indices | |
| Index of time | |
| Index of EV number | |
| Variables | |
| EV penalty energy cost | |
| Grid energy cost | |
| Storage energy cost | |
| PV shedding energy cost | |
| Solar irradiation | |
| Power distribution coefficient | |
| EV charging power of v vehicle | |
| Grid power | |
| Grid injection power | |
| Grid supply power | |
| Grid power reference | |
| IIREVs total demand power | |
| IIREVs total power | |
| IIREVs shed power | |
| PV MPPT power | |
| PV power prediction in MPPT mode | |
| PV power | |
| PV shed power | |
| Stationary storage power | |
| Stationary storage charging power | |
| Stationary storage discharging power | |
| Stationary storage power reference | |
| Reference power | |
| State of charge of electric vehicle v | |
| State of charge of stationary storage | |
| Ambient temperature | |
| Continuous time | |
| PV cell temperature | |
| Voltage of the DC bus | |
References
- Sechilariu, M.; Locment, F.; Darene, N. Social Acceptance of Microgrids Dedicated to Electric Vehicle Charging Stations. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 10–17 October 2018; IEEE: Paris, France, 2018; pp. 1374–1379. [Google Scholar]
- Liu, N.; Chen, Q.; Liu, J.; Lu, X.; Li, P.; Lei, J.; Zhang, J. A Heuristic Operation Strategy for Commercial Building Microgrids Containing EVs and PV System. IEEE Trans. Ind. Electron. 2015, 62, 2560–2570. [Google Scholar] [CrossRef]
- Honarmand, M.; Zakariazadeh, A.; Jadid, S. Integrated Scheduling of Renewable Generation and Electric Vehicles Parking Lot in a Smart Microgrid. Energy Convers. Manag. 2014, 86, 745–755. [Google Scholar] [CrossRef]
- Sechilariu, M.; Molines, N.; Richard, G.; Martell-Flores, H.; Locment, F.; Baert, J. Electromobility Framework Study: Infrastructure and Urban Planning for EV Charging Station Empowered by PV-Based Microgrid. IET Electr. Syst. Transp. 2019, 9, 176–185. [Google Scholar] [CrossRef]
- Global EV Outlook 2020—Analysis. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 30 October 2020).
- Wang, Z.; Zhang, Y.; You, S.; Xiao, H.; Cheng, M. An Integrated Power Conversion System for Electric Traction and V2G Operation in Electric Vehicles With a Small Film Capacitor. IEEE Trans. Power Electron. 2020, 35, 5066–5077. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Jin, C.; Tang, J.; Ghosh, P. Optimizing Electric Vehicle Charging: A Customer’s Perspective. IEEE Trans. Veh. Technol. 2013, 62, 2919–2927. [Google Scholar] [CrossRef]
- Xia, Y.; Hu, B.; Xie, K.; Tang, J.; Tai, H. An EV Charging Demand Model for the Distribution System Using Traffic Property. IEEE Access 2019, 7, 28089–28099. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Aluisio, B.; Bruno, S.; De Bellis, L.; Dicorato, M.; Forte, G.; Trovato, M. DC-Microgrid Operation Planning for an Electric Vehicle Supply Infrastructure. Appl. Sci. 2019, 9, 2687. [Google Scholar] [CrossRef] [Green Version]
- Chaudhari, K.; Ukil, A.; Kumar, K.N.; Manandhar, U.; Kollimalla, S.K. Hybrid Optimization for Economic Deployment of ESS in PV-Integrated EV Charging Stations. IEEE Trans. Ind. Inform. 2018, 14, 106–116. [Google Scholar] [CrossRef]
- Suyono, H.; Rahman, M.T.; Mokhlis, H.; Othman, M.; Illias, H.A.; Mohamad, H. Optimal Scheduling of Plug-in Electric Vehicle Charging Including Time-of-Use Tariff to Minimize Cost and System Stress. Energies 2019, 12, 1500. [Google Scholar] [CrossRef] [Green Version]
- Deepak Mistry, R.; Eluyemi, F.T.; Masaud, T.M. Impact of Aggregated EVs Charging Station on the Optimal Scheduling of Battery Storage System in Islanded Microgrid. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–5. [Google Scholar]
- Davis, N.; Johnson, B.; McJunkin, T.; Scoffield, D.; White, S. Dispatch Control with PEV Charging and Renewables for Multiplayer Game Application. In Proceedings of the 2016 IEEE Conference on Technologies for Sustainability (SusTech), Phoenix, AZ, USA, 9–11 October 2016; pp. 156–161. [Google Scholar]
- Petrusic, A.; Janjic, A. Renewable Energy Tracking and Optimization in a Hybrid Electric Vehicle Charging Station. Appl. Sci. 2021, 11, 245. [Google Scholar] [CrossRef]
- Faraji, J.; Abazari, A.; Babaei, M.; Muyeen, S.M.; Benbouzid, M. Day-Ahead Optimization of Prosumer Considering Battery Depreciation and Weather Prediction for Renewable Energy Sources. Appl. Sci. 2020, 10, 2774. [Google Scholar] [CrossRef]
- Bucić, P.; Lešić, V.; Vašak, M. Distributed Optimal Batteries Charging Control for Heterogenous Electric Vehicles Fleet. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 837–842. [Google Scholar]
- Xu, T.; Sun, H.; Zhu, B.; Long, Y.; Wang, H.; Li, Z. Economic Optimization Control of Microgrid with Electric Vehicles. In Proceedings of the 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 20–22 July 2018; pp. 733–736. [Google Scholar]
- Moya, F.D.; Torres-Moreno, J.L.; Álvarez, J.D. Optimal Model for Energy Management Strategy in Smart Building with Energy Storage Systems and Electric Vehicles. Energies 2020, 13, 3605. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, P.; Zhang, J.; Niu, L.; Han, X. Multidispatch for Microgrid Including Renewable Energy and Electric Vehicles with Robust Optimization Algorithm. Energies 2020, 13, 2813. [Google Scholar] [CrossRef]
- Ghotge, R.; Snow, Y.; Farahani, S.; Lukszo, Z.; van Wijk, A. Optimized Scheduling of EV Charging in Solar Parking Lots for Local Peak Reduction under EV Demand Uncertainty. Energies 2020, 13, 1275. [Google Scholar] [CrossRef] [Green Version]
- Oliveira Farias, H.E.; Sepulveda Rangel, C.A.; Weber Stringini, L.; Neves Canha, L.; Pegoraro Bertineti, D.; da Silva Brignol, W.; Iensen Nadal, Z. Combined Framework with Heuristic Programming and Rule-Based Strategies for Scheduling and Real Time Operation in Electric Vehicle Charging Stations. Energies 2021, 14, 1370. [Google Scholar] [CrossRef]
- Nafisi, H.; Agah, S.M.M.; Askarian Abyaneh, H.; Abedi, M. Two-Stage Optimization Method for Energy Loss Minimization in Microgrid Based on Smart Power Management Scheme of PHEVs. IEEE Trans. Smart Grid 2016, 7, 1268–1276. [Google Scholar] [CrossRef]
- Yan, D.; Ma, C. Stochastic Planning of Electric Vehicle Charging Station Integrated with Photovoltaic and Battery Systems. Transm. Distrib. IET Gener. 2020, 14, 4217–4224. [Google Scholar] [CrossRef]
- Akram, U.; Khalid, M.; Shafiq, S. An Improved Optimal Sizing Methodology for Future Autonomous Residential Smart Power Systems. IEEE Access 2018, 6, 5986–6000. [Google Scholar] [CrossRef]
- Jiang, H.; Ning, S.; Ge, Q. Multi-Objective Optimal Dispatching of Microgrid With Large-Scale Electric Vehicles. IEEE Access 2019, 7, 145880–145888. [Google Scholar] [CrossRef]
- Dai, Q.; Liu, J.; Wei, Q. Optimal Photovoltaic/Battery Energy Storage/Electric Vehicle Charging Station Design Based on Multi-Agent Particle Swarm Optimization Algorithm. Sustainability 2019, 11, 1973. [Google Scholar] [CrossRef] [Green Version]
- Lan, T.; Jermsittiparsert, K.; Alrashood, S.T.; Rezaei, M.; Al-Ghussain, L.; Mohamed, M.A. An Advanced Machine Learning Based Energy Management of Renewable Microgrids Considering Hybrid Electric Vehicles’ Charging Demand. Energies 2021, 14, 569. [Google Scholar] [CrossRef]
- Minh, P.V.; Le Quang, S.; Pham, M.-H. Technical Economic Analysis of Photovoltaic-Powered Electric Vehicle Charging Stations under Different Solar Irradiation Conditions in Vietnam. Sustainability 2021, 13, 3528. [Google Scholar] [CrossRef]
- Rafique, M.K.; Khan, S.U.; Saeed Uz Zaman, M.; Mehmood, K.K.; Haider, Z.M.; Bukhari, S.B.A.; Kim, C.-H. An Intelligent Hybrid Energy Management System for a Smart House Considering Bidirectional Power Flow and Various EV Charging Techniques. Appl. Sci. 2019, 9, 1658. [Google Scholar] [CrossRef] [Green Version]
- Zeng, B.; Dong, H.; Sioshansi, R.; Xu, F.; Zeng, M. Bilevel Robust Optimization of Electric Vehicle Charging Stations With Distributed Energy Resources. IEEE Trans. Ind. Appl. 2020, 56, 5836–5847. [Google Scholar] [CrossRef]
- Wu, H.; Pang, G.K.H.; Choy, K.L.; Lam, H.Y. An Optimization Model for Electric Vehicle Battery Charging at a Battery Swapping Station. IEEE Trans. Veh. Technol. 2018, 67, 881–895. [Google Scholar] [CrossRef]
- Chung, C.-H.; Jangra, S.; Lai, Q.; Lin, X. Optimization of Electric Vehicle Charging for Battery Maintenance and Degradation Management. IEEE Trans. Transp. Electrif. 2020, 6, 958–969. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Robust Optimal Power Management System for a Hybrid AC/DC Micro-Grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Sigalo, M.B.; Pillai, A.C.; Das, S.; Abusara, M. An Energy Management System for the Control of Battery Storage in a Grid-Connected Microgrid Using Mixed Integer Linear Programming. Energies 2021, 14, 6212. [Google Scholar] [CrossRef]
- Moser, A.; Muschick, D.; Gölles, M.; Nageler, P.; Schranzhofer, H.; Mach, T.; Ribas Tugores, C.; Leusbrock, I.; Stark, S.; Lackner, F.; et al. A MILP-Based Modular Energy Management System for Urban Multi-Energy Systems: Performance and Sensitivity Analysis. Appl. Energy 2020, 261, 114342. [Google Scholar] [CrossRef]
- Abou El-Ela, A.A.; El-Sehiemy, R.A.; Allam, S.M.; Shaheen, A.M.; Nagem, N.A.; Sharaf, A.M. Renewable Energy Micro-Grid Interfacing: Economic and Environmental Issues. Electronics 2022, 11, 815. [Google Scholar] [CrossRef]
- El-Ela, A.A.A.; El-Seheimy, R.A.; Shaheen, A.M.; Wahbi, W.A.; Mouwafi, M.T. PV and Battery Energy Storage Integration in Distribution Networks Using Equilibrium Algorithm. J. Energy Storage 2021, 42, 103041. [Google Scholar] [CrossRef]
- Shaheen, A.M.; Hamida, M.A.; El-Sehiemy, R.A.; Elattar, E.E. Optimal Parameter Identification of Linear and Non-Linear Models for Li-Ion Battery Cells. Energy Rep. 2021, 7, 7170–7185. [Google Scholar] [CrossRef]
- Hamida, M.A.; El-Sehiemy, R.A.; Ginidi, A.R.; Elattar, E.; Shaheen, A.M. Parameter Identification and State of Charge Estimation of Li-Ion Batteries Used in Electric Vehicles Using Artificial Hummingbird Optimizer. J. Energy Storage 2022, 51, 104535. [Google Scholar] [CrossRef]
- Sechilariu, M.; Locment, F. Photovoltaic Source Modeling and Control. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 35–91. ISBN 978-0-12-803736-2. [Google Scholar]
- Sechilariu, M.; Locment, F. Backup Power Resources for Microgrid. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 93–132. ISBN 978-0-12-803736-2. [Google Scholar]
- Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F. PV-Powered Charging Station: Energy Management and Cost Optimization. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar]
- Sechilariu, M.; Locment, F. Direct Current Microgrid Power Modeling and Control. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 133–170. ISBN 978-0-12-803736-2. [Google Scholar]
- Sechilariu, M.; Locment, F. Experimental Evaluation of Urban Direct Current Microgrid. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 209–250. ISBN 978-0-12-803736-2. [Google Scholar]
- Montaño-Salcedo, C.E.; Sechilariu, M.; Locment, F. Human-System Interfaces for PV-Powered Electric Vehicles Charging Station. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar]
- Marra, F.; Yang, G.Y.; Træholt, C.; Larsen, E.; Rasmussen, C.N.; You, S. Demand Profile Study of Battery Electric Vehicle under Different Charging Options. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar]
- ILOG CPLEX Optimization Studio—Overview. Available online: https://www.ibm.com/products/ilog-cplex-optimization-studio (accessed on 16 March 2022).
- Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F.; Krim, Y. PV-Powered Electric Vehicle Charging Stations: Preliminary Requirements and Feasibility Conditions. Appl. Sci. 2021, 11, 1770. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 20% | 50 kW | 0.01 €/kWh | |||
| 80% | 50 kW | 1.2 €/kWh | |||
| 20% | 34.5 kW | 400 V | |||
| 100% | 84 PV | 90 kWh | |||
| 50% | 28.98 kWp | 50 kWh | |||
| 50 kW | 0.1 €/kWh | ||||
| 22 kW | 0.7 €/kWh | ||||
| 7 kW | 2.5 €/kWh |
| EVs | |||||
|---|---|---|---|---|---|
| EV1 | 29% | 74% | 09:10 | 03:13 | Slow |
| EV2 | 23% | 78% | 09:40 | 01:15 | Average |
| EV3 | 22% | 88% | 12:20 | 04:43 | Slow |
| EV4 | 32% | 78% | 14:20 | 03:18 | Slow |
| EV5 | 29% | 70% | 14:30 | 00:25 | Fast |
| 35% | 5 kW | 0.01 €/kWh | |||
| 60% | 5 kW | 1.2 €/kWh | |||
| 20% | 3.45 kW | 400 V | |||
| 100% | 12 PV | 37.44 kWh | |||
| 50% | 4.14 kWp | 5 kWh | |||
| 5 kW | 0.1 €/kWh | ||||
| 2.2 kW | 0.7 €/kWh | ||||
| 0.7 kW | 2.5 €/kWh |
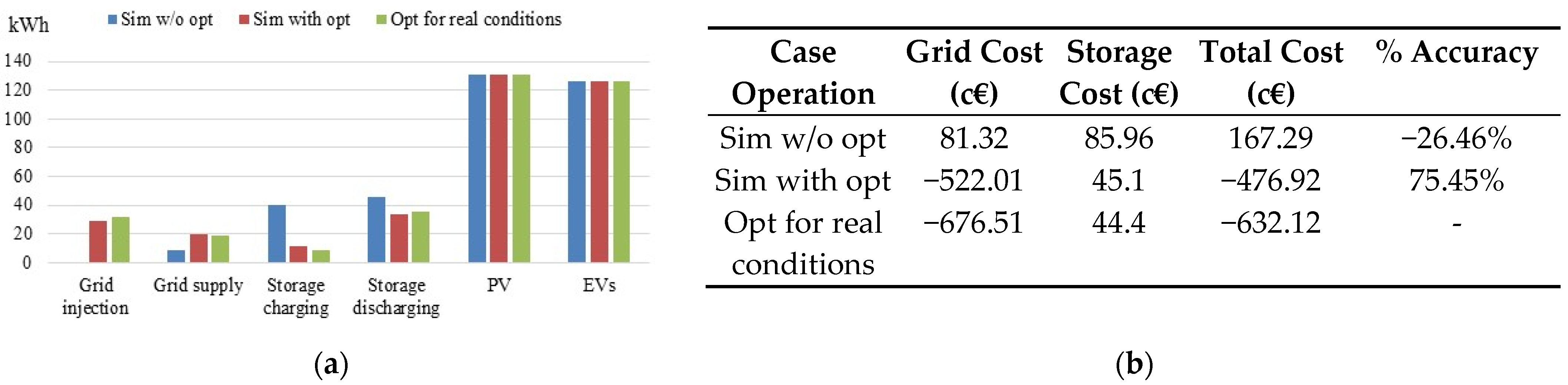
| Case Operation | Grid Cost (c€) | Storage Cost (c€) | Total Cost (c€) |
|---|---|---|---|
| Real-time exp w/o opt | 13.90 | 8.52 | 22.73 |
| Real-time exp with opt | 59.18 | 5.68 | 64.86 |
| Opt for real conditions | 5.51 | 5.61 | 11.12 |
| Case Operation | Grid Cost (c€) | Storage Cost (c€) | EV Shedding Cost (c€) | Total Cost (c€) |
|---|---|---|---|---|
| Real-time exp w/o opt | 109.83 | 6.17 | 40.72 | 156.73 |
| Real-time exp with opt | 54.88 | 5.73 | 0 | 60.91 |
| Opt for real conditions | 47.75 | 5.61 | 0 | 53.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F. Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations. Appl. Sci. 2022, 12, 4323. https://doi.org/10.3390/app12094323
Cheikh-Mohamad S, Sechilariu M, Locment F. Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations. Applied Sciences. 2022; 12(9):4323. https://doi.org/10.3390/app12094323
Chicago/Turabian StyleCheikh-Mohamad, Saleh, Manuela Sechilariu, and Fabrice Locment. 2022. "Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations" Applied Sciences 12, no. 9: 4323. https://doi.org/10.3390/app12094323
APA StyleCheikh-Mohamad, S., Sechilariu, M., & Locment, F. (2022). Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations. Applied Sciences, 12(9), 4323. https://doi.org/10.3390/app12094323