
Contactless Vital Sign Monitoring System for In-Vehicle Driver Monitoring Using a Near-Infrared Time-of-Flight Camera

 ,
,
Abstract
:1. Introduction
2. Background and Motivation
3. Experiment Setup
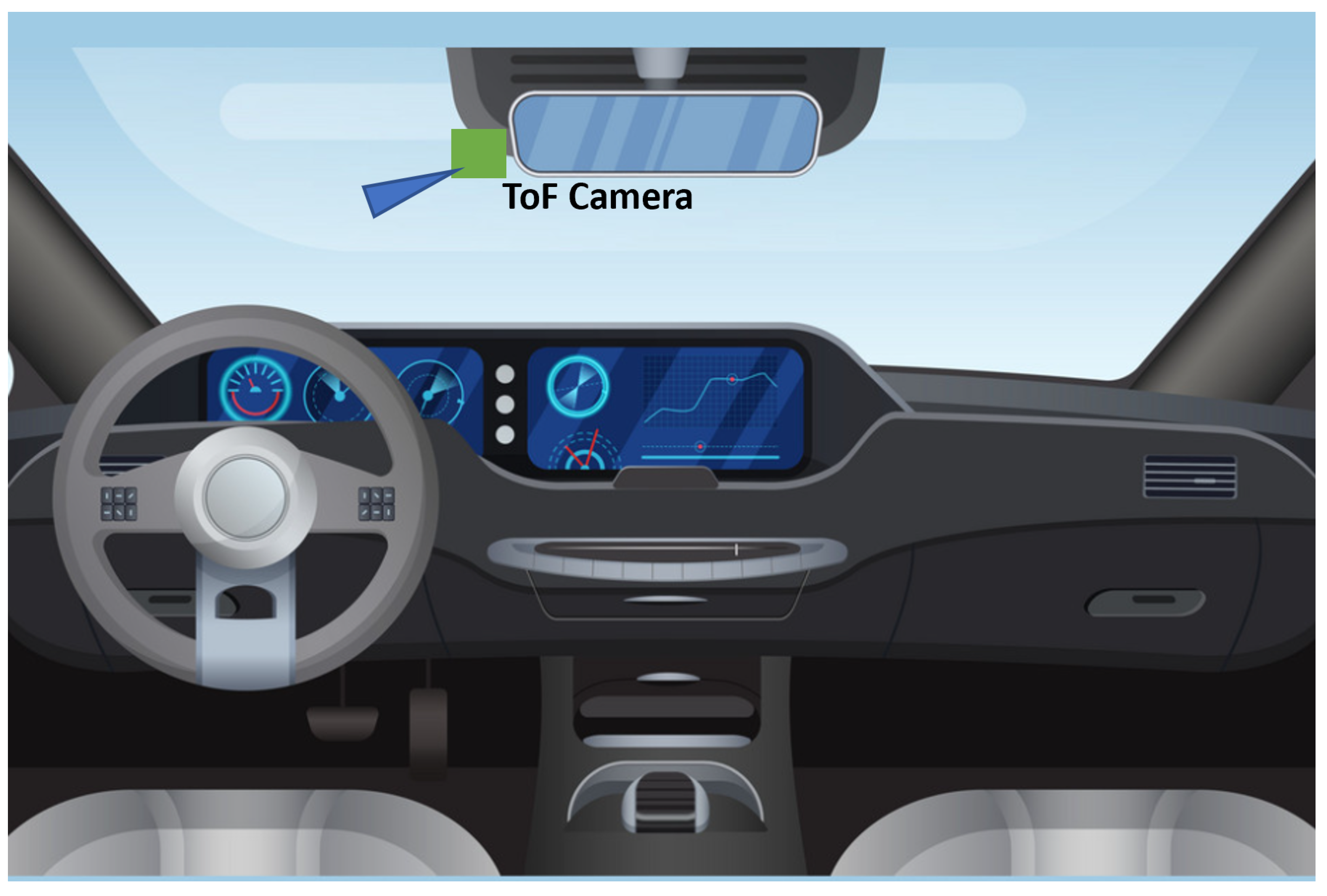
3.1. Hardware Configuration
3.2. HR and RR Extraction
3.3. In-Vehicle Testing of the System
4. Experiment Results
4.1. HR and RR Measurements in Bright and Dark Lighting Conditions
4.2. On-the-Road Testing of HR and RR
5. Discussion
6. Summary
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ziebinski, A.; Cupek, R.; Grzechca, D.; Chruszczyk, L. Review of advanced driver assistance systems (ADAS). In AIP Conference Proceedings; AIP Publishing LLC.: Melville, NY, USA, 2017; Volume 1906, p. 120002. [Google Scholar]
- Ziebinski, A.; Cupek, R.; Erdogan, H.; Waechter, S. A survey of ADAS technologies for the future perspective of sensor fusion. In International Conference on Computational Collective Intelligence; Springer: Berlin/Heidelberg, Germany, 2016; pp. 135–146. [Google Scholar]
- Béquet, A.J.; Hidalgo-Muñoz, A.R.; Jallais, C. Towards mindless stress regulation in advanced driver assistance systems: A systematic review. Front. Psychol. 2020, 11, 609124. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Warnecke, J.M.; Haghi, M.; Deserno, T.M. Unobtrusive health monitoring in private spaces: The smart vehicle. Sensors 2020, 20, 2442. [Google Scholar] [CrossRef] [PubMed]
- Patel, M.; Lal, S.K.; Kavanagh, D.; Rossiter, P. Applying neural network analysis on heart rate variability data to assess driver fatigue. Expert Syst. Appl. 2011, 38, 7235–7242. [Google Scholar] [CrossRef]
- EuroNCAP. Test and Assessment Protocol-Child Presence Detection. 2021. Available online: https://cdn.euroncap.com/media/64101/euro-ncap-cpd-test-and-assessment-protocol-v10.pdf (accessed on 27 February 2022).
- Vicente, J.; Laguna, P.; Bartra, A.; Bailón, R. Drowsiness detection using heart rate variability. Med Biol. Eng. Comput. 2016, 54, 927–937. [Google Scholar] [CrossRef] [PubMed]
- Kiashari, S.E.H.; Nahvi, A.; Homayounfard, A.; Bakhoda, H. Monitoring the variation in driver respiration rate from wakefulness to drowsiness: A non-intrusive method for drowsiness detection using thermal imaging. J. Sleep Sci. 2018, 3, 1–9. [Google Scholar]
- Fujiwara, K.; Abe, E.; Kamata, K.; Nakayama, C.; Suzuki, Y.; Yamakawa, T.; Hiraoka, T.; Kano, M.; Sumi, Y.; Masuda, F.; et al. Heart rate variability-based driver drowsiness detection and its validation with EEG. IEEE Trans. Biomed. Eng. 2018, 66, 1769–1778. [Google Scholar] [CrossRef]
- Leonhardt, S.; Leicht, L.; Teichmann, D. Unobtrusive vital sign monitoring in automotive environments—A review. Sensors 2018, 18, 3080. [Google Scholar] [CrossRef] [Green Version]
- Nowara, E.M.; Marks, T.K.; Mansour, H.; Veeraraghavan, A. Near-infrared imaging photoplethysmography during driving. IEEE Trans. Intell. Transp. Syst. 2000, 23, 3589–3600. [Google Scholar] [CrossRef]
- Huang, P.W.; Wu, B.J.; Wu, B.F. A heart rate monitoring framework for real-world drivers using remote photoplethysmography. IEEE J. Biomed. Health Inform. 2020, 25, 1397–1408. [Google Scholar] [CrossRef]
- Magdalena Nowara, E.; Marks, T.K.; Mansour, H.; Veeraraghavan, A. SparsePPG: Towards driver monitoring using camera-based vital signs estimation in near-infrared. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1272–1281. [Google Scholar]
- Zhang, Q.; Zhou, Y.; Song, S.; Liang, G.; Ni, H. Heart rate extraction based on near-infrared camera: Towards driver state monitoring. IEEE Access 2018, 6, 33076–33087. [Google Scholar] [CrossRef]
- Lee, Y.S.; Pathirana, P.N.; Steinfort, C.L.; Caelli, T. Monitoring and analysis of respiratory patterns using microwave doppler radar. IEEE J. Transl. Eng. Health Med. 2014, 2, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Zhao, P.; Lu, C.X.; Wang, B.; Chen, C.; Xie, L.; Wang, M.; Trigoni, N.; Markham, A. Heart rate sensing with a robot mounted mmwave radar. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Virtual Confernece, 31 May–31 August 2020; pp. 2812–2818. [Google Scholar]
- Verkruysse, W.; Svaasand, L.O.; Nelson, J.S. Remote plethysmographic imaging using ambient light. Opt. Express 2008, 16, 21434–21445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kumar, M.; Veeraraghavan, A.; Sabharwal, A. DistancePPG: Robust non-contact vital signs monitoring using a camera. Biomed. Opt. Express 2015, 6, 1565–1588. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W.; Den Brinker, A.C.; Stuijk, S.; De Haan, G. Algorithmic principles of remote PPG. IEEE Trans. Biomed. Eng. 2016, 64, 1479–1491. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Nakayama, Y.; Dagdanpurev, S.; Abe, S.; Nishimura, H.; Kirimoto, T.; Matsui, T. Remote sensing of multiple vital signs using a CMOS camera-equipped infrared thermography system and its clinical application in rapidly screening patients with suspected infectious diseases. Int. J. Infect. Dis. 2017, 55, 113–117. [Google Scholar] [CrossRef] [Green Version]
- Negishi, T.; Abe, S.; Matsui, T.; Liu, H.; Kurosawa, M.; Kirimoto, T.; Sun, G. Contactless vital signs measurement system using RGB-thermal image sensors and its clinical screening test on patients with seasonal influenza. Sensors 2020, 20, 2171. [Google Scholar] [CrossRef] [Green Version]
- Nahler, C.; Feldhofer, B.; Ruether, M.; Holweg, G.; Druml, N. Exploring the usage of Time-of-Flight Cameras for contact and remote Photoplethysmography. In Proceedings of the 2018 21st Euromicro Conference on Digital System Design (DSD), Prague, Czech Republic, 29–31 August 2018; pp. 433–441. [Google Scholar]
- De Haan, G.; Jeanne, V. Robust pulse rate from chrominance-based rPPG. IEEE Trans. Biomed. Eng. 2013, 60, 2878–2886. [Google Scholar] [CrossRef]
- Cheng, J.; Chen, X.; Xu, L.; Wang, Z.J. Illumination variation-resistant video-based heart rate measurement using joint blind source separation and ensemble empirical mode decomposition. IEEE J. Biomed. Health Inform. 2016, 21, 1422–1433. [Google Scholar] [CrossRef]
- Feng, L.; Po, L.M.; Xu, X.; Li, Y.; Ma, R. Motion-resistant remote imaging photoplethysmography based on the optical properties of skin. IEEE Trans. Circuits Syst. Video Technol. 2014, 25, 879–891. [Google Scholar] [CrossRef]
- van Gastel, M.; Stuijk, S.; de Haan, G. Motion robust remote-PPG in infrared. IEEE Trans. Biomed. Eng. 2015, 62, 1425–1433. [Google Scholar] [CrossRef]
- Yu, S.; Hu, S.; Azorin-Peris, V.; Chambers, J.A.; Zhu, Y.; Greenwald, S.E. Motion-compensated noncontact imaging photoplethysmography to monitor cardiorespiratory status during exercise. J. Biomed. Opt. 2011, 16, 077010. [Google Scholar]
- Guo, K.; Zhai, T.; Pashollari, E.; Varlamos, C.J.; Ahmed, A.; Islam, M.N. Contactless Vital Sign Monitoring System for Heart and Respiratory Rate Measurements with Motion Compensation Using a Near-Infrared Time-of-Flight Camera. Appl. Sci. 2021, 11, 10913. [Google Scholar] [CrossRef]
- Charlton, P.H.; Bonnici, T.; Tarassenko, L.; Clifton, D.A.; Beale, R.; Watkinson, P.J. An assessment of algorithms to estimate respiratory rate from the electrocardiogram and photoplethysmogram. Physiol. Meas. 2016, 37, 610. [Google Scholar] [CrossRef] [PubMed]
- van Gastel, M.; Stuijk, S.; de Haan, G. Robust respiration detection from remote photoplethysmography. Biomed. Opt. Express 2016, 7, 4941–4957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gleichauf, J.; Herrmann, S.; Hennemann, L.; Krauss, H.; Nitschke, J.; Renner, P.; Niebler, C.; Koelpin, A. Automated non-contact respiratory rate monitoring of neonates based on synchronous evaluation of a 3D Time-of-Flight camera and a microwave interferometric radar sensor. Sensors 2021, 21, 2959. [Google Scholar] [CrossRef] [PubMed]
- Matsuda, T.; Makikawa, M. ECG monitoring of a car driver using capacitively-coupled electrodes. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; pp. 1315–1318. [Google Scholar]
- Wusk, G.; Gabler, H. Non-invasive detection of respiration and heart rate with a vehicle seat sensor. Sensors 2018, 18, 1463. [Google Scholar] [CrossRef] [Green Version]
- Foix, S.; Alenya, G.; Torras, C. Lock-in Time-of-Flight (ToF) cameras: A survey. IEEE Sens. J. 2011, 11, 1917–1926. [Google Scholar] [CrossRef] [Green Version]
- Lugaresi, C.; Tang, J.; Nash, H.; McClanahan, C.; Uboweja, E.; Hays, M.; Zhang, F.; Chang, C.L.; Yong, M.G.; Lee, J.; et al. Mediapipe: A framework for building perception pipelines. arXiv 2019, arXiv:1906.08172. [Google Scholar]
- Ruiz, N.; Chong, E.; Rehg, J.M. Fine-grained head pose estimation without keypoints. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2074–2083. [Google Scholar]
- Zanuttigh, P.; Marin, G.; Dal Mutto, C.; Dominio, F.; Minto, L.; Cortelazzo, G.M. Time-of-flight and structured light depth cameras. Technol. Appl. 2016, 978–983. [Google Scholar] [CrossRef] [Green Version]
- NHTSA. Traffic Safety Facts (2018 Data): Rural/Urban Comparison of Traffic Fatalities. 2020. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812957 (accessed on 27 February 2022).
- Keel, M.S.; Kim, D.; Kim, Y.; Bae, M.; Ki, M.; Chung, B.; Son, S.; Lee, H.; Jo, H.; Shin, S.C.; et al. A 4-tap 3. In 5 μm 1.2 Mpixel Indirect Time-of-Flight CMOS Image Sensor with Peak Current Mitigation and Multi-User Interference Cancellation. In Proceedings of the 2021 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 13–22 February 2021; Volume 64, pp. 106–108. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Sensor | HR? | RR? * | Contactless? | HR Robust against Motion? | Ambient Light Resistance? | Independent of Skin Color? |
|---|---|---|---|---|---|---|
| Electrocardiogram [9,32] | ++ | Indirect | N | ++ | ++ | ++ |
| Radar [15,16] | − | Direct | Y | − | ++ | ++ |
| Ballistocardiograph [33] | − | Direct | N | − | ++ | ++ |
| Thermography [8,20] | N/A | Direct | Y | N/A | ++ | ++ |
| PPG with RGB Camera [12,14] | ++ | Indirect | Y | + | − | − |
| PPG with IR Camera [11,13] | + | N/A | Y | − | + | + |
| PPG with indirect ToF Camera [This Study] | + | Direct | Y | + | ++ | + |
| Parameters Measured | Test Condition | Number of Participants | Number of Measurements | Total Miles Driven |
|---|---|---|---|---|
| HR | Highway-Passenger | 6 | 141 | >70 |
| HR | Highway-Driver | 5 | 151 | >60 |
| HR | Local-Passenger | 6 | 141 | >15 |
| HR | Local-Driver | 5 | 143 | >12 |
| HR | Highway-Driver | 5 | 135 | >60 |
| Frame Rate (FPS) | 15 | 30 | 60 | 105 |
|---|---|---|---|---|
| Npixel | 7 | 4 | 2 | 1 |
| Success Rate | 58.7% | 68% | 76% | N/A |
| Clothing Type | T-Shirt | Sweater | Rain Jacket | Wool Coat | Down Jacket | Multi-Layer * Clothing |
|---|---|---|---|---|---|---|
| Absolute Mean Error (BPM) | 1.77 | 1.56 | 1.51 | 1.02 | 1.75 | 3.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Zhai, T.; Purushothama, M.H.; Dobre, A.; Meah, S.; Pashollari, E.; Vaish, A.; DeWilde, C.; Islam, M.N. Contactless Vital Sign Monitoring System for In-Vehicle Driver Monitoring Using a Near-Infrared Time-of-Flight Camera. Appl. Sci. 2022, 12, 4416. https://doi.org/10.3390/app12094416
Guo K, Zhai T, Purushothama MH, Dobre A, Meah S, Pashollari E, Vaish A, DeWilde C, Islam MN. Contactless Vital Sign Monitoring System for In-Vehicle Driver Monitoring Using a Near-Infrared Time-of-Flight Camera. Applied Sciences. 2022; 12(9):4416. https://doi.org/10.3390/app12094416
Chicago/Turabian StyleGuo, Kaiwen, Tianqu Zhai, Manoj H. Purushothama, Alexander Dobre, Shawn Meah, Elton Pashollari, Aabhaas Vaish, Carl DeWilde, and Mohammed N. Islam. 2022. "Contactless Vital Sign Monitoring System for In-Vehicle Driver Monitoring Using a Near-Infrared Time-of-Flight Camera" Applied Sciences 12, no. 9: 4416. https://doi.org/10.3390/app12094416
APA StyleGuo, K., Zhai, T., Purushothama, M. H., Dobre, A., Meah, S., Pashollari, E., Vaish, A., DeWilde, C., & Islam, M. N. (2022). Contactless Vital Sign Monitoring System for In-Vehicle Driver Monitoring Using a Near-Infrared Time-of-Flight Camera. Applied Sciences, 12(9), 4416. https://doi.org/10.3390/app12094416