
Control System Design and Methods for Collaborative Robots: Review




Abstract
:1. Introduction
2. Literature Review Methodology
3. Human–Robot Collaboration
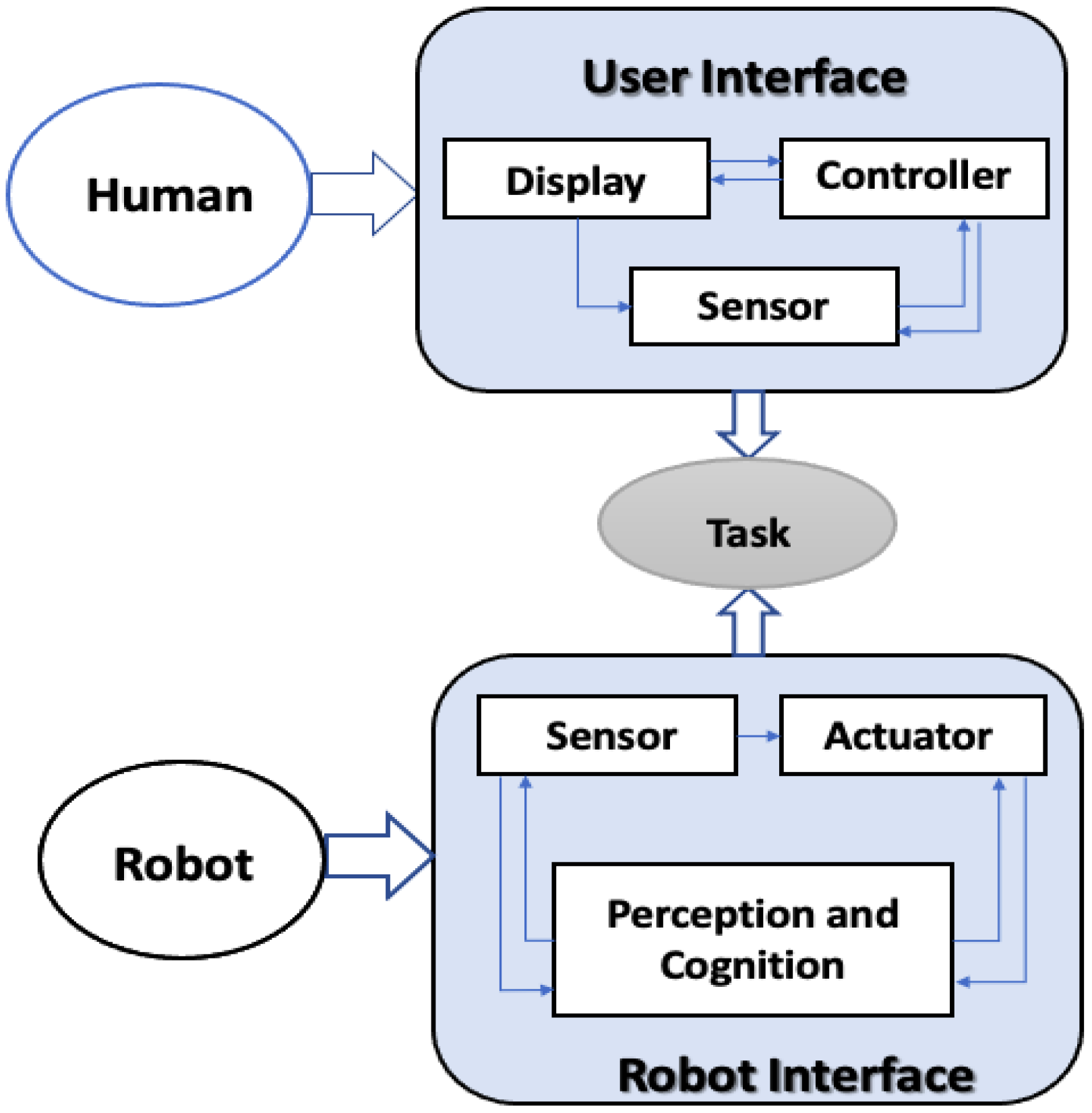
3.1. Human–Robot Interaction
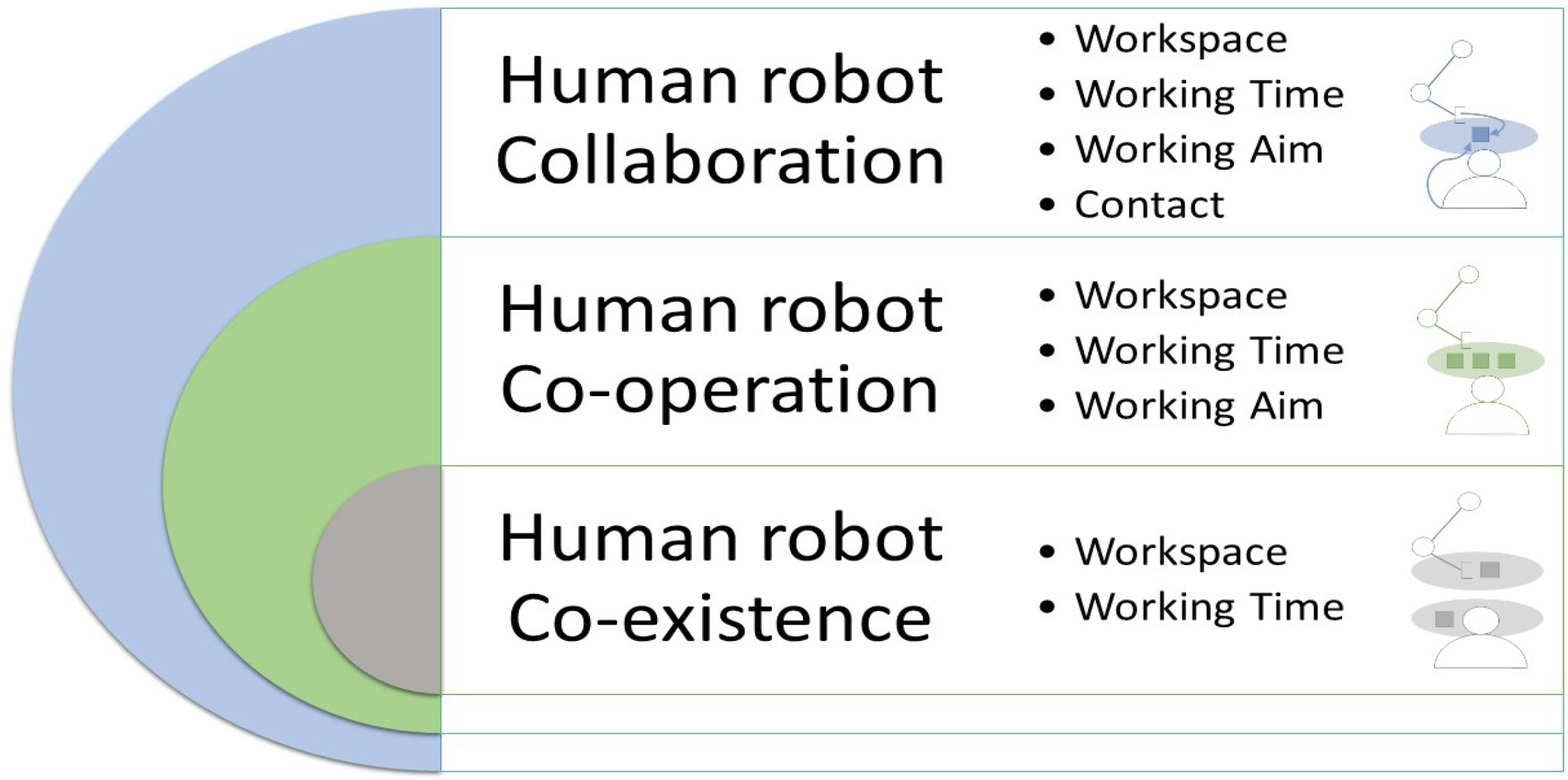
3.2. Human–Robot Collaboration Types
3.3. Collaborative Robotic Operations
4. Control Design of Human–Robot Collaboration
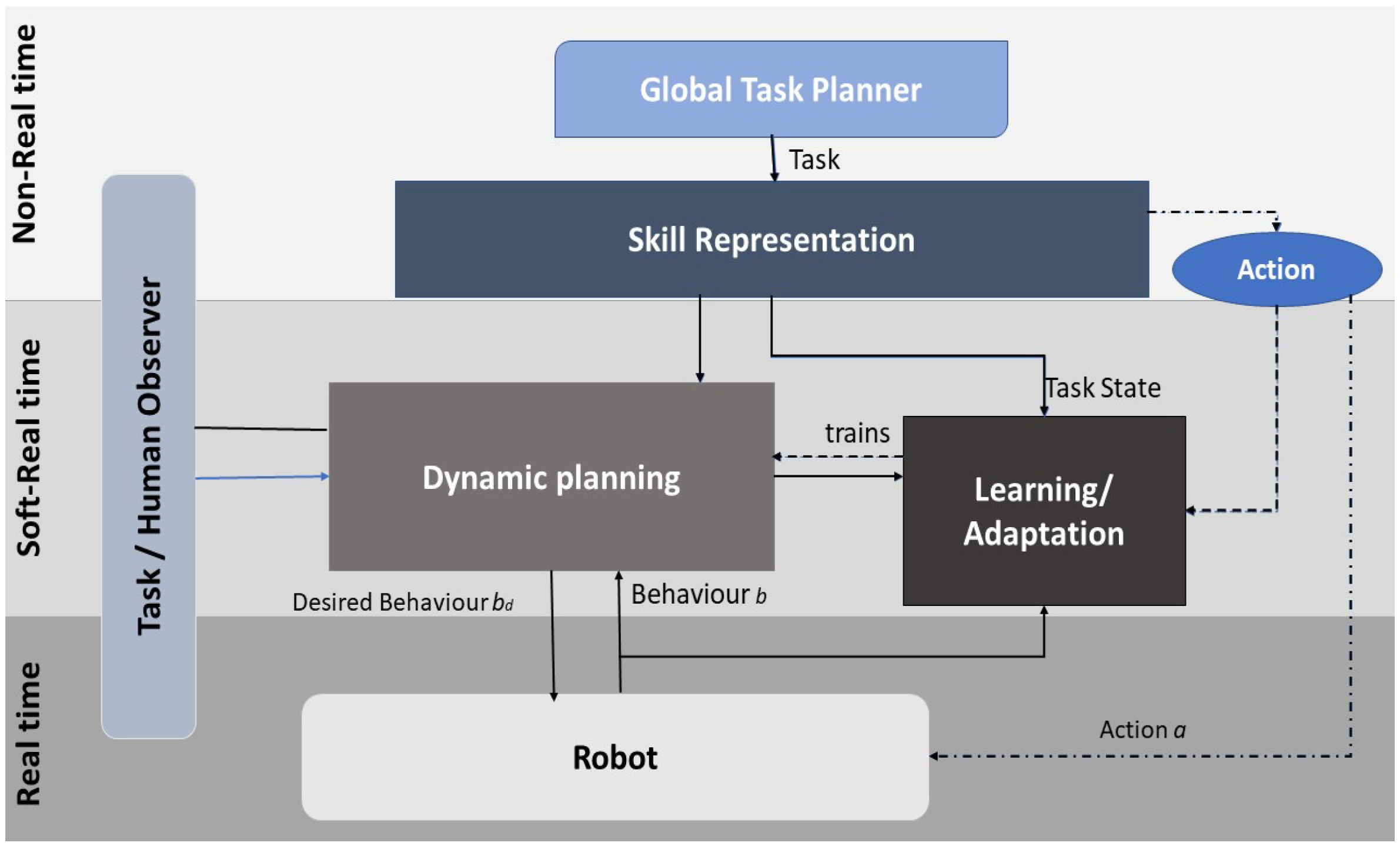
4.1. Collaborative Control System Architectures
4.1.1. Non-Real-Time Layer
4.1.2. Soft Real-Time Layer
4.1.3. Real-Time Layer
4.2. Controller Challenges
4.2.1. Estimation of Human Intention
4.2.2. Safety
4.2.3. Human-Caused Disturbances
5. Control Methodologies
5.1. Impedance Control Strategy
5.2. Invariance Control Strategy
5.3. Exteroceptive Sensor-Based Control Strategy
5.4. Proprioceptive Sensor-Based Control Strategy
5.5. Distance/Speed-Based Control Strategy
5.6. Probabilistic Method
5.7. Human-Caused Disturbance Methods
6. Discussions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peshkin, M.A.; Colgate, J.E.; Wannasuphoprasit, W.; Moore, C.A.; Gillespie, R.B.; Akella, P. Cobot architecture. IEEE Trans. Robot. Autom. 2001, 17, 377–390. [Google Scholar] [CrossRef] [Green Version]
- KUKA. KUKA Robotics, 2021. Available online: https://www.kuka.com/ (accessed on 31 December 2022).
- Mourtzis, D. Simulation in the design and operation of manufacturing systems: State of the art and new trends. Int. J. Prod. Res. 2020, 58, 1927–1949. [Google Scholar] [CrossRef]
- MarketsMarkets. Collaborative Robot Market by Payload Capacity (up to 5 Kg, between 5 and 10 K, above 10 K), Industry, Application, and G. Forecast to 2025. Technical Report. 2021. Available online: https://www.marketsandmarkets.com/Market-Reports/collaborative-robot-market-194541294.html (accessed on 31 December 2022).
- Wang, X.V.; Kemény, Z.; Váncza, J.; Wang, L. Human–robot collaborative assembly in cyber-physical production: Classification framework and implementation. CIRP Ann. 2017, 66, 5–8. [Google Scholar] [CrossRef] [Green Version]
- Parsa, S.; Saadat, M. Human–robot collaboration disassembly planning for end-of-life product disassembly process. Robot. Comput.-Integr. Manuf. 2021, 71, 102170. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. Comput.-Integr. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Zoltan, D.; S, D.K. Technology jump in the industry: Human–robot cooperation in production. Ind. Robot 2020, 47, 757–775. [Google Scholar] [CrossRef]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–robot interaction in industrial collaborative robotics: A literature review of the decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Umbrico, A.; Orlandini, A.; Cesta, A. An Ontology for Human-Robot Collaboration. Procedia CIRP 2020, 93, 1097–1102. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Crosnier, A.; Lasnier, A.; Fraisse, P. Collaborative manufacturing with physical human–robot interaction. Robot. Comput.-Integr. Manuf. 2016, 40, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Bi, Z.; Luo, M.; Miao, Z.; Zhang, B.; Zhang, W.; Wang, L. Safety assurance mechanisms of collaborative robotic systems in manufacturing. Robot. Comput.-Integr. Manuf. 2021, 67, 102022. [Google Scholar] [CrossRef]
- Schmidtler, J.; Knott, V.; Hölzel, C.; Bengler, K. Human Centered Assistance Applications for the working environment of the future. Occup. Ergon. 2015, 12, 83–95. [Google Scholar] [CrossRef]
- Matheson, E.; Minto, R.; Zampieri, E.G.G.; Faccio, M.; Rosati, G. Human–Robot Collaboration in Manufacturing Applications: A Review. Robotics 2019, 8, 100. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Gao, R.; Váncza, J.; Krüger, J.; Wang, X.; Makris, S.; Chryssolouris, G. Symbiotic human–robot collaborative assembly. CIRP Ann. 2019, 68, 701–726. [Google Scholar] [CrossRef] [Green Version]
- Al-Yacoub, A.; Zhao, Y.; Eaton, W.; Goh, Y.; Lohse, N. Improving human robot collaboration through Force/Torque based learning for object manipulation. Robot. Comput.-Integr. Manuf. 2021, 69, 102111. [Google Scholar] [CrossRef]
- Rahman, S.M.; Wang, Y. Mutual trust-based subtask allocation for human–robot collaboration in flexible lightweight assembly in manufacturing. Mechatronics 2018, 54, 94–109. [Google Scholar] [CrossRef]
- Jiang, J.; Huang, Z.; Bi, Z.; Ma, X.; Yu, G. State-of-the-Art control strategies for robotic PiH assembly. Robot. Comput.-Integr. Manuf. 2020, 65, 101894. [Google Scholar] [CrossRef]
- Cheng, C.; Liu, S.; Wu, H.; Zhang, Y. Neural network–based direct adaptive robust control of unknown MIMO nonlinear systems using state observer. Int. J. Adapt. Control Signal Process. 2020, 34, 1–14. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Zhang, S. Human-Robot Collaborative Manipulation with the Suppression of Human-caused Disturbance. J. Intell. Robot. Syst. 2021, 102, 1–11. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Chen, W.; Zhang, J.; Sun, W.; Chen, J.; Gu, J.; Zhu, S. RBFNN-Based Adaptive Sliding Mode Control Design for Delayed Nonlinear Multilateral Telerobotic System With Cooperative Manipulation. IEEE Trans. Ind. Inform. 2020, 16, 1236–1247. [Google Scholar] [CrossRef]
- Abadi, A.S.S.; Hosseinabadi, P.A.; Mekhilef, S. Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems. Int. J. Control Autom. Syst. 2020, 18, 2492–2508. [Google Scholar] [CrossRef]
- Scholtz, J. Theory and evaluation of human robot interactions. In Proceedings of the 36th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 6–9 January 2003; p. 10. [Google Scholar] [CrossRef] [Green Version]
- Cherubini, A.; Passama, R.; Meline, A.; Crosnier, A.; Fraisse, P. Multimodal control for human–robot cooperation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2202–2207. [Google Scholar] [CrossRef] [Green Version]
- Hua, C.; Yang, Y.; Liu, P.X. Output-feedback adaptive control of networked teleoperation system with time-varying delay and bounded inputs. IEEE/ASME Trans. Mechatron. 2014, 20, 2009–2020. [Google Scholar] [CrossRef]
- Zhai, D.H.; Xia, Y. Adaptive fuzzy control of multilateral asymmetric teleoperation for coordinated multiple mobile manipulators. IEEE Trans. Fuzzy Syst. 2015, 24, 57–70. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Sun, W.; Gu, J.; Yao, B. RBF-neural-network-based adaptive robust control for nonlinear bilateral teleoperation manipulators with uncertainty and time delay. IEEE/ASME Trans. Mechatron. 2019, 25, 906–918. [Google Scholar] [CrossRef]
- Rosenstrauch, M.J.; Krüger, J. Safe human–robot-collaboration-introduction and experiment using ISO/TS 15066. In Proceedings of the 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 740–744. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Asfour, T.; Kaul, L.; Wächter, M.; Ottenhaus, S.; Weiner, P.; Rader, S.; Grimm, R.; Zhou, Y.; Grotz, M.; Paus, F.; et al. ARMAR-6: A Collaborative Humanoid Robot for Industrial Environments. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 447–454. [Google Scholar] [CrossRef]
- Tang, L.; Jiang, Y.; Lou, J. Reliability architecture for collaborative robot control systems in complex environments. Int. J. Adv. Robot. Syst. 2016, 13, 17. [Google Scholar] [CrossRef]
- Ye, Y.; Li, P.; Li, Z.; Xie, F.; Liu, X.J.; Liu, J. Real-Time Design Based on PREEMPT_RT and Timing Analysis of Collaborative Robot Control System. In Proceedings of the Intelligent Robotics and Applications; Liu, X.J., Nie, Z., Yu, J., Xie, F., Song, R., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 596–606. [Google Scholar]
- Dumonteil, G.; Manfredi, G.; Devy, M.; Confetti, A.; Sidobre, D. Reactive planning on a collaborative robot for industrial applications. In Proceedings of the 2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015; Volume 2, pp. 450–457. [Google Scholar]
- Parusel, S.; Haddadin, S.; Albu-Schäffer, A. Modular state-based behavior control for safe human-robot interaction: A lightweight control architecture for a lightweight robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4298–4305. [Google Scholar] [CrossRef]
- Xi, Q.; Zheng, C.W.; Yao, M.Y.; Kou, W.; Kuang, S.L. Design of a Real-time Robot Control System oriented for Human-Robot Cooperation. In Proceedings of the 2021 International Conference on Artificial Intelligence and Electromechanical Automation (AIEA), Guangzhou, China, 14–16 May 2021; pp. 23–29. [Google Scholar]
- Gambao, E.; Hernando, M.; Surdilovic, D. A new generation of collaborative robots for material handling. In Proceedings of the International Symposium on Automation and Robotics in Construction; IAARC Publications: Eindhoven, The Netherlands, 2012; Volume 29, p. 1. [Google Scholar]
- Fong, T.; Thorpe, C.; Baur, C. Advanced Interfaces for Vehicle Teleoperation: Collaborative Control, Sensor Fusion Displays, and Remote Driving Tools. Auton. Robot. 2001, 11, 77–85. [Google Scholar] [CrossRef]
- Haddadin, S.; Croft, E. Physical human-obot interaction. In Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016; pp. 1835–1874. [Google Scholar]
- Skrinjar, L.; Slavič, J.; Boltežar, M. A review of continuous contact-force models in multibody dynamics. Int. J. Mech. Sci. 2018, 145, 171–187. [Google Scholar] [CrossRef]
- Ahmadizadeh, M.; Shafei, A.; Fooladi, M. Dynamic analysis of multiple inclined and frictional impact-contacts in multi-branch robotic systems. Appl. Math. Model. 2021, 91, 24–42. [Google Scholar] [CrossRef]
- Korayem, M.; Shafei, A.; Seidi, E. Symbolic derivation of governing equations for dual-arm mobile manipulators used in fruit-picking and the pruning of tall trees. Comput. Electron. Agric. 2014, 105, 95–102. [Google Scholar] [CrossRef]
- Shafei, A.; Shafei, H. Planar multibranch open-loop robotic manipulators subjected to ground collision. J. Comput. Nonlinear Dyn. 2017, 12, 06100. [Google Scholar] [CrossRef]
- Ding, H.; Reißig, G.; Wijaya, K.; Bortot, D.; Bengler, K.; Stursberg, O. Human arm motion modeling and long-term prediction for safe and efficient Human-Robot-Interaction. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5875–5880. [Google Scholar] [CrossRef]
- Thomaz, A.; Hoffman, G.; Cakmak, M. Computational Human-Robot Interaction. Found. Trends Robot. 2016, 4, 105–223. [Google Scholar] [CrossRef]
- Lasota, P.A.; Song, T.; Shah, J.A. A Survey of Methods for Safe Human-Robot Interaction; Now: Delft, Netherlands, 2017; p. 1. [Google Scholar] [CrossRef]
- Wang, W.; Li, R.; Chen, Y.; Diekel, Z.M.; Jia, Y. Facilitating Human–Robot Collaborative Tasks by Teaching-Learning-Collaboration From Human Demonstrations. IEEE Trans. Autom. Sci. Eng. 2019, 16, 640–653. [Google Scholar] [CrossRef]
- Ragaglia, M.; Zanchettin, A.M.; Rocco, P. Safety-aware trajectory scaling for Human-Robot Collaboration with prediction of human occupancy. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 85–90. [Google Scholar] [CrossRef]
- Krämer, M.; Rösmann, C.; Hoffmann, F.; Bertram, T. Model predictive control of a collaborative manipulator considering dynamic obstacles. Optim. Control Appl. Methods 2020, 41, 1211–1232. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation: Part I—Theory. J. Dyn. Syst. Meas. Control 1985, 107, 1–7. [Google Scholar] [CrossRef]
- Ott, C.; Mukherjee, R.; Nakamura, Y. Unified Impedance and Admittance Control. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 554–561. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation: Part II—Implementation. J. Dyn. Syst. Meas. Control 1985, 107, 8–16. [Google Scholar] [CrossRef]
- Benedictis, C.D.; Franco, W.; Maffiodo, D.; Ferraresi, C. Control of Force Impulse in Human–Machine Impact; Springer International Publishing: Cham, Switzerland, 2018; pp. 956–964. [Google Scholar]
- Duan, J.; Gan, Y.; Chen, M.; Dai, X. Adaptive variable impedance control for dynamic contact force tracking in uncertain environment. Robot. Auton. Syst. 2018, 102, 54–65. [Google Scholar] [CrossRef]
- Tagliamonte, N.L.; Sergi, F.; Accoto, D.; Carpino, G.; Guglielmelli, E. Double actuation architectures for rendering variable impedance in compliant robots: A review. Mechatronics 2012, 22, 1187–1203. [Google Scholar] [CrossRef]
- Li, X.; Pan, Y.; Chen, G.; Yu, H. Adaptive Human–Robot Interaction Control for Robots Driven by Series Elastic Actuators. IEEE Trans. Robot. 2017, 33, 169–182. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Hirzinger, G. Cartesian impedance control techniques for torque controlled light-weight robots. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 657–663. [Google Scholar] [CrossRef]
- Kosuge, K.; Sato, M.; Kazamura, N. Mobile robot helper. In Proceedings of the IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 583–588. [Google Scholar] [CrossRef]
- Geravand, M.; Flacco, F.; Luca, A.D. Human–robot physical interaction and collaboration using an industrial robot with a closed control architecture. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4000–4007. [Google Scholar] [CrossRef]
- Salter, T.; Michaud, F.; Létourneau, D.; Lee, D.C.; Werry, I.P. Using proprioceptive sensors for categorizing human–robot interactions. In Proceedings of the HRI ’07: Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Arlington, VA, USA, 10–12 March 2007; pp. 105–112. [Google Scholar] [CrossRef]
- Ćehajić, D.; Erhart, S.; Hirche, S. Grasp pose estimation in human–robot manipulation tasks using wearable motion sensors. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1031–1036. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.; Li, Z.; Han, G.; Liu, N.; Su, Y.; Ning, J.; Yang, F. Adaptive EKF Based on HMM Recognizer for Attitude Estimation Using MEMS MARG Sensors. IEEE Sens. J. 2018, 18, 3299–3310. [Google Scholar] [CrossRef]
- Kimmel, M.; Hirche, S. Invariance Control for Safe Human–Robot Interaction in Dynamic Environments. IEEE Trans. Robot. 2017, 33, 1327–1342. [Google Scholar] [CrossRef] [Green Version]
- Albu-Schäffer, A.; Ott, C.; Hirzinger, G. A Unified Passivity-based Control Framework for Position, Torque and Impedance Control of Flexible Joint Robots. Int. J. Robot. Res. 2007, 26, 23–39. [Google Scholar] [CrossRef]
- Gribovskaya, E.; Kheddar, A.; Billard, A. Motion learning and adaptive impedance for robot control during physical interaction with humans. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4326–4332. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Meng, Q. Impedance control with adaptation for robotic manipulations. IEEE Trans. Robot. Autom. 1991, 7, 408–415. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Ceriani, N.M.; Rocco, P.; Ding, H.; Matthias, B. Safety in human–robot collaborative manufacturing environments: Metrics and control. IEEE Trans. Autom. Sci. Eng. 2016, 13, 882–893. [Google Scholar] [CrossRef] [Green Version]
- Cherubini, A.; Navarro-Alarcon, D. Sensor-Based Control for Collaborative Robots: Fundamentals, Challenges, and Opportunities. Front. Neurorobot. 2021, 14, 576846. [Google Scholar] [CrossRef] [PubMed]
- Erden, M.S.; Billard, A. Hand Impedance Measurements During Interactive Manual Welding With a Robot. IEEE Trans. Robot. 2015, 31, 168–179. [Google Scholar] [CrossRef]
- Lippiello, V.; Siciliano, B.; Villani, L. Robot Interaction Control Using Force and Vision. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1470–1475. [Google Scholar] [CrossRef]
- Santis, A.D.; Lippiello, V.; Siciliano, B.; Luigi, V. Human-Robot Interaction Control Using Force and Vision. In Advances in Control Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2007; Volume 353. [Google Scholar] [CrossRef] [Green Version]
- Avanzini, G.B.; Ceriani, N.M.; Zanchettin, A.M.; Rocco, P.; Bascetta, L. Safety Control of Industrial Robots Based on a Distributed Distance Sensor. IEEE Trans. Control Syst. Technol. 2014, 22, 2127–2140. [Google Scholar] [CrossRef]
- Kouris, A.; Dimeas, F.; Aspragathos, N. A Frequency Domain Approach for Contact Type Distinction in Human–Robot Collaboration. IEEE Robot. Autom. Lett. 2018, 3, 720–727. [Google Scholar] [CrossRef]
- Schimmack, M.; Haus, B.; Mercorelli, P. An Extended Kalman Filter as an Observer in a Control Structure for Health Monitoring of a Metal–Polymer Hybrid Soft Actuator. IEEE/ASME Trans. Mechatron. 2018, 23, 1477–1487. [Google Scholar] [CrossRef]
- Lacevic, B.; Rocco, P. Kinetostatic danger field—A novel safety assessment for human–robot interaction. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2169–2174. [Google Scholar] [CrossRef]
- Parker, C.A.C.; Croft, E.A. Design & Personalization of a Cooperative Carrying Robot Controller. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3916–3921. [Google Scholar] [CrossRef]
- Meziane, R.; Li, P.; Otis, M.J.; Ezzaidi, H.; Cardou, P. Safer hybrid workspace using human–robot interaction while sharing production activities. In Proceedings of the 2014 IEEE International Symposium on Robotic and Sensors Environments (ROSE) Proceedings, Timisoara, Romania, 16–18 October 2014; pp. 37–42. [Google Scholar] [CrossRef]
- Michieletto, S.; Ghidoni, S.; Pagello, E.; Moro, M. Why teach robotics using ROS. J. Autom. Mob. Robot. Intell. Syst. 2014, 60–68. [Google Scholar] [CrossRef]
- Fong, T.; Thorpe, C.; Baur, C. Collaboration, Dialogue, Human-Robot Interaction; Springer: Berlin/Heidelberg, Germany, 2003; pp. 255–266. [Google Scholar]
- Kragic, D.; Gustafson, J.; Karaoguz, H.; Jensfelt, P.; Krug, R. Interactive, Collaborative Robots: Challenges and Opportunities; AAAI Press: Palo Alto, CA, USA, 2018; pp. 18–25. [Google Scholar]
- Sheng, W.; Thobbi, A.; Gu, Y. An Integrated Framework for Human–Robot Collaborative Manipulation. IEEE Trans. Cybern. 2015, 45, 2030–2041. [Google Scholar] [CrossRef]
- Hoffman, G. Evaluating Fluency in Human–Robot Collaboration. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 209–218. [Google Scholar] [CrossRef]
- Bascetta, L.; Ferretti, G.; Rocco, P.; Ardö, H.; Bruyninckx, H.; Demeester, E.; Lello, E.D. Towards safe human–robot interaction in robotic cells: An approach based on visual tracking and intention estimation. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2971–2978. [Google Scholar] [CrossRef]
- Berger, E.; Vogt, D.; Haji-Ghassemi, N.; Jung, B.; Amor, H.B. Inferring guidance information in cooperative human-robot tasks. In Proceedings of the 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 124–129. [Google Scholar]
- Liu, P.; Yu, H.; Cang, S. Adaptive neural network tracking control for underactuated systems with matched and mismatched disturbances. Nonlinear Dyn. 2019, 98, 1447–1464. [Google Scholar] [CrossRef] [Green Version]
- Schaal, S. Dynamic movement primitives-a framework for motor control in humans and humanoid robotics. In Adaptive Motion of Animals and Machines; Springer: Tokyo, Japan, 2006; pp. 261–280. [Google Scholar]
- Shyam, R.A.; Lightbody, P.; Das, G.; Liu, P.; Gomez-Gonzalez, S.; Neumann, G. Improving local trajectory optimisation using probabilistic movement primitives. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 2666–2671. [Google Scholar]
- Ding, H.; Heyn, J.; Matthias, B.; Staab, H. Structured collaborative behavior of industrial robots in mixed human–robot environments. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–20 August 2013; pp. 1101–1106. [Google Scholar]
- Ding, H.; Schipper, M.; Matthias, B. Collaborative behavior design of industrial robots for multiple human–robot collaboration. In Proceedings of the IEEE ISR 2013, Seoul, Republic of Korea, 24–26 October 2013; pp. 1–6. [Google Scholar]
- Hawkins, K.P.; Bansal, S.; Vo, N.N.; Bobick, A.F. Anticipating human actions for collaboration in the presence of task and sensor uncertainty. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2215–2222. [Google Scholar]
- Mariotti, E.; Magrini, E.; Luca, A.D. Admittance Control for Human-Robot Interaction Using an Industrial Robot Equipped with a F/T Sensor. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6130–6136. [Google Scholar] [CrossRef]
- Roveda, L.; Iannacci, N.; Tosatti, L.M. Discrete-Time Formulation for Optimal Impact Control in Interaction Tasks. J. Intell. Robot. Syst. 2018, 90, 407–417. [Google Scholar] [CrossRef]
- Rahman, S.M.; Wang, Y.; Walker, I.D.; Mears, L.; Pak, R.; Remy, S. Trust-based compliant robot-human handovers of payloads in collaborative assembly in flexible manufacturing. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 355–360. [Google Scholar]
- Rahman, S.M.; Liao, Z.; Jiang, L.; Wang, Y. A regret-based autonomy allocation scheme for human–robot shared vision systems in collaborative assembly in manufacturing. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 897–902. [Google Scholar]
- Whitsell, B.; Artemiadis, P. Physical human–robot interaction (pHRI) in 6 DOF with asymmetric cooperation. IEEE Access 2017, 5, 10834–10845. [Google Scholar] [CrossRef]
- Bös, J.; Wahrburg, A.; Listmann, K.D. Iteratively learned and temporally scaled force control with application to robotic assembly in unstructured environments. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3000–3007. [Google Scholar]
- Vemula, B.; Matthias, B.; Ahmad, A. A design metric for safety assessment of industrial robot design suitable for power- and force-limited collaborative operation. Int. J. Intell. Robot. Appl. 2018, 2, 226–234. [Google Scholar] [CrossRef] [Green Version]
- Darvish, K.; Bruno, B.; Simetti, E.; Mastrogiovanni, F.; Casalino, G. Interleaved online task planning, simulation, task allocation and motion control for flexible human–robot cooperation. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 58–65. [Google Scholar]
- Wojtynek, M.; Oestreich, H.; Beyer, O.; Wrede, S. Collaborative and robot-based plug & produce for rapid reconfiguration of modular production systems. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 1067–1073. [Google Scholar]
- Michalos, G.; Kousi, N.; Karagiannis, P.; Gkournelos, C.; Dimoulas, K.; Koukas, S.; Mparis, K.; Papavasileiou, A.; Makris, S. Seamless human robot collaborative assembly–An automotive case study. Mechatronics 2018, 55, 194–211. [Google Scholar] [CrossRef]
- Tsarouchi, P.; Makris, S.; Michalos, G.; Matthaiakis, S.; Chatzigeorgiou, X.; Athanasatos, A.; Stefos, M.; Aivaliotis, P.; Chryssolouris, G. ROS Based Coordination of Human Robot Cooperative Assembly Tasks-An Industrial Case Study. Procedia CIRP 2015, 37, 254–259. [Google Scholar] [CrossRef]
- Michieletto, S.; Tosello, E.; Romanelli, F.; Ferrara, V.; Menegatti, E. ROS-I Interface for COMAU Robots. In Proceedings of the Simulation, Modeling, and Programming for Autonomous Robots; Brugali, D., Broenink, J.F., Kroeger, T., MacDonald, B.A., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 243–254. [Google Scholar]
- Safeea, M.; Neto, P.; Béarée, R. On-line collision avoidance for collaborative robot manipulators by adjusting off-line generated paths: An industrial use case. Robot. Auton. Syst. 2019, 119, 278–288. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robotic Operation | Human Input | Speed | Techniques | Torques |
|---|---|---|---|---|
| Power- and force-limiting | Application-dependent | Maximum determined speed to limit forces | The robot cannot exceed power excessive force | Max. determined torques |
| Speed and separation monitoring | No human control in collaborative workspace | Safety-rated monitored speed | Limited contact between robot and human | Necessary to establish a minimum separation distance and to execute the application |
| Hand guiding | Emergency stop | Safety-rated monitored speed | Motion controlled with direct operator input | Operator input |
| Safety-rated monitored stop | Operator has no control | When human is in collaborative workspace, speed is zero | Robotic operation stops, if the human is present | Gravity and load compensation only |
| Collaborative Robot | Robotic Platform | Collaborative Robot Operation | Collaboration Configuration | Collaborative Interaction | Collaborative Triggering Parameter | Physical HR Interaction | Collaborative Scenarios | Goal | Sensors | Control Methods | Control Objective | Performance | Year (Reference) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ABB FRIDA | Dual-arm robot | Speed and separation monitoring | One robot–two humans | Two interaction zone | Distance | Yes | Automatic | Safety | Microsoft Kinect | Impedance control | HR-Collision avoidance | Improve collision-free path for each robotic arm | 2013 [87] |
| ABB FRIDA | Dual-arm robot | Speed and separation monitoring | Multiple robots-multiple humans | Two interaction zones | Distance | Yes | Automatic | Productivity | Microsoft Kinect | Impedance control | Reduce speed | Improve robotic functionality by reducing uptime with safety constraints | 2013 [88] |
| Universal Robots | One-arm robot | Power and force limiting | Multiple robots–multiple humans | One interaction zone | Euclidean distance | Yes | Automatic | Productivity | Position, velocity, camera | Control strategy | Handle uncertainty and perceptual perturbations | Improves collaborative task efficiency by reducing disturbances for multi path anticipation | 2014 [89] |
| KUKA KR5 | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Distance | Yes | Automatic | Safety | Position, force | Web-based control systems | HR collision avoidance | Improve assembly operation | 2015 [90] |
| KUKA LWR4+ | One-arm robots | Hand guiding | One robot–one human | One interaction zone | Distance | Yes | Automatic | Productivity | Force | Safe and task consistent control | HR collision avoidance | Improve safety during HR interaction | 2015 [91] |
| Kinova | One-arm robot | Speed and separation monitoring | One robot–one human | One interaction zone | Human trust threshold | Yes | Automatic | Safety | Vision | Proprioceptive sensor-based control | N/A | Improves HR interaction by trust-based handover in motion planning | 2016 [92] |
| Rethink Baxter | Dual-arm robot | Hand guiding | One robot–one human | One interaction zone | HR Team fluency, human cognitive workload, human trust | Yes | Automatic | Productivity | Vision | Exteroceptive control | Suboptimal autonomy allocation | HR interaction is attain for sub-optimal allocation in different sensing modes | 2016 [93] |
| KUKA LWR IV | Dual-arm robot | Hand guiding | One robot–one human | One interaction zone | Vision | Yes | Automatic | Safety | Vision, force | Joint space kinematic control | HR collision avoidance | Intrinsic collision detection obeys safety standard using trajectory optimization and visual gesture monitoring | 2016 [11] |
| KUKA LBRiiwa | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Displacement | Yes | Automatic | Productivity | Force | Impedance control | Motion trajectory tracking | Controller shows smooth trajectory following in assembly application | 2017 [94] |
| ABB YuMi | Dual-arm robot | No | One robot–one human | One interaction zone | Stiffness | Yes | Manual | Productivity | Reduce contact force and trajectory tracking | Iterative learning and temporal scaled force control | Productivity | It increases assembly speed and adjusts reference trajectory | 2017 [95] |
| Kuka LWR | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Force | Yes | Manual | Safety, productivity | Position, force | Invariance control | HR collision avoidance | Controller provide larger damping with dynamic constraint perpendicular to assembly line | 2017 [68] |
| KUKA KR5 | One-arm robot | Power- and force-limiting | One robot–one human | One interaction zone | Velocity | Yes | Automatic | Productivity, safety | Position, Force | Impedance control | HR collision detection and avoidance | Fast collision detection and safe robot reaction to unexpected collisions | 2017 [58] |
| DLR | One-arm robot | Power- and force-limiting | One robot–one human | One interaction zone | Force | Yes | Automatic | Safety | Force | Control strategy | HR collision detection | Effect of contact force and human body elasticity is verified in simulation for collision | 2017 [96] |
| Baxter Robot | Dual-arm robot | Hand guiding | One robot–one human | One interaction zone | Velocity | No | No | Productivity | Microsoft Kinect, acceleration | Control approach | Online motion tracking | Online perception-task planning is implemented for collaborative assembly | 2018 [97] |
| Kuka LBRIIWA | Two-finger gripper robot | Hand guiding | One robot–one human | One interaction zone | Position mounting points | Yes | Manual | Productivity and safety | Force | Exteroceptive- sensor-based control | Collision detection with trajectory tracking | Adaptation and verification of robot behavior is performed through a simulation-based planning subsystem | 2017 [98] |
| COMAU | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Force | Yes | Manual | Safety | Force | Admittance control | HR collision avoidance | Cycle time reduction and human’s operator strain is minimized | 2018 [99] |
| Universal robot | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Position | Yes | Automatic | Safety | Distance | Impedance and admittance control | HR collaboration collision detection | Safe HR collaboration is achieved | 2018 [11] |
| Cobot | Dual-arm robot | Hand guiding | One robot–one human | One interaction zone | Position | No | Manual | Productivity | Camera | Impedance and admittance control | HR task coordination | Coordination of HR assembly task scenario is simulated on ROS platform | 2018 [100] |
| COMAU Smart5 SiX | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Position | Yes | Manual | Productivity | Camera | Multi-modal control | Motion tracking in HR collaboration | Controller guarantees same trajectory interpolation | 2018 [101] |
| KUKA | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Position | Yes | Automatic | Safety | force | State observer control | HR collision avoidance | Collision avoidance guarantee through repulsion vector reshaping | 2019 [102] |
| Cobot | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Position | Yes | Automatic | Productivity | Position | Admittance control | HR collision avoidance | 3D motion tracking is achieved with accuracy and stability | 2019 [61] |
| Cobot | One-arm robot | Hand guiding | One robot–one human | One interaction zone | Position, Vision | No | Manual | Safety | Position | Exteroceptive control | HR collision avoidance | Collision avoidance algorithm is simulated and tested | 2019 [37] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hameed, A.; Ordys, A.; Możaryn, J.; Sibilska-Mroziewicz, A. Control System Design and Methods for Collaborative Robots: Review. Appl. Sci. 2023, 13, 675. https://doi.org/10.3390/app13010675
Hameed A, Ordys A, Możaryn J, Sibilska-Mroziewicz A. Control System Design and Methods for Collaborative Robots: Review. Applied Sciences. 2023; 13(1):675. https://doi.org/10.3390/app13010675
Chicago/Turabian StyleHameed, Ayesha, Andrzej Ordys, Jakub Możaryn, and Anna Sibilska-Mroziewicz. 2023. "Control System Design and Methods for Collaborative Robots: Review" Applied Sciences 13, no. 1: 675. https://doi.org/10.3390/app13010675
APA StyleHameed, A., Ordys, A., Możaryn, J., & Sibilska-Mroziewicz, A. (2023). Control System Design and Methods for Collaborative Robots: Review. Applied Sciences, 13(1), 675. https://doi.org/10.3390/app13010675