1. Introduction
For many valve actuation systems, designing a closed-loop valve position control system is challenging due to its nonlinear frictions, especially for valves that must operate in high temperature environments, such as exhaust gas recirculation (EGR) valves. One approach is to apply advanced model-based control strategies (for example, sliding mode control [
1], linear parameter-varying control [
2,
3,
4], etc.) to deal with valve system nonlinearity. However, it is difficult to obtain an accurate nonlinear friction model. Thus, the advanced model-based control approach usually requires long development cycles and tremendous modeling efforts by experienced engineers [
5,
6]. Moreover, such advanced model-based controllers are often difficult to tune, validate, and implement. On the other hand, classical proportional-integral-derivative (PID) control continues to dominate in valve system control due to its advantages of simplicity and easy tuning/calibration.
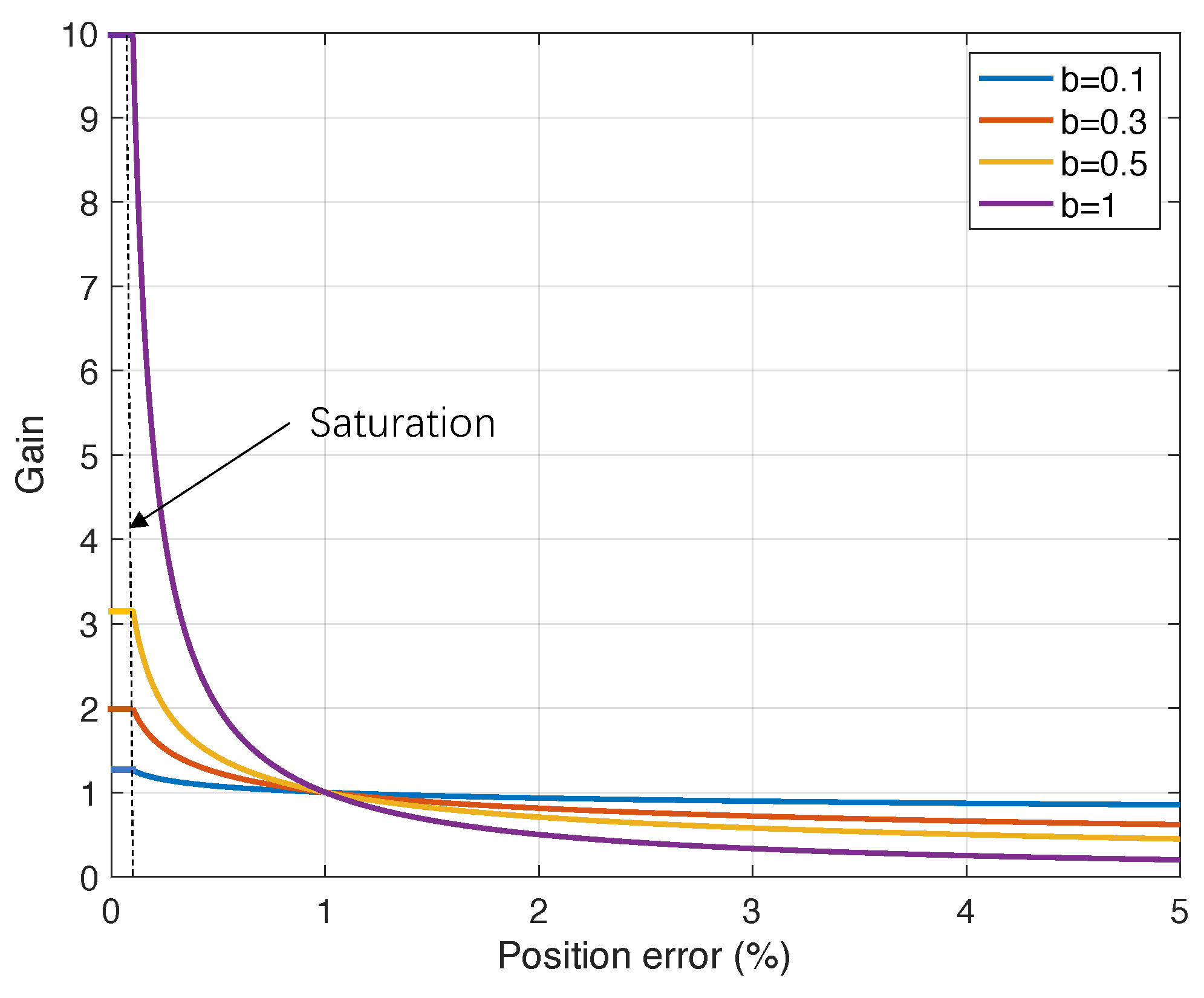
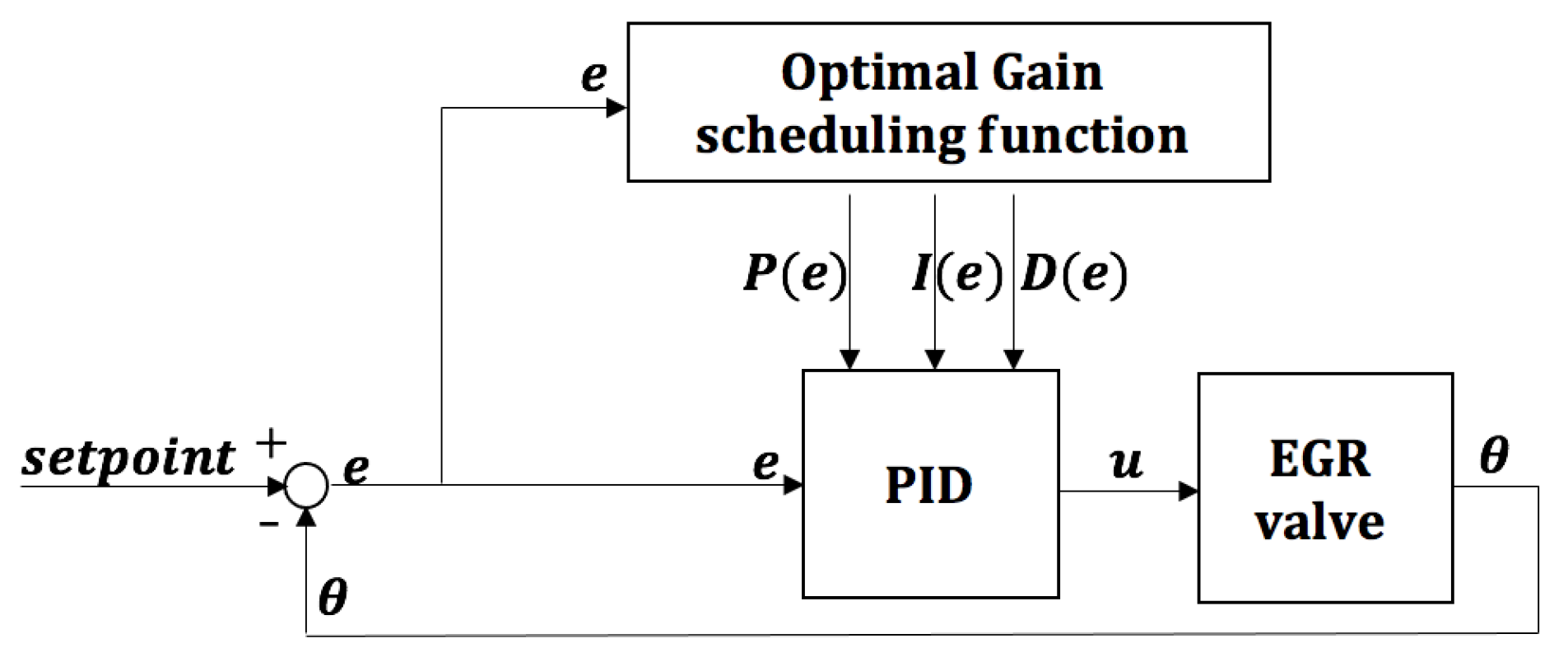
System nonlinearity with varying operating conditions is one of main challenges in PID controller tuning. For example, test results show that a well-calibrated PID EGR valve controller can have a small steady-state error under multiple operational conditions; however, under small valve opening conditions, the relative steady-state error of the valve can increase significantly [
5]. The main reason for this is that PID controllers are driven by the position error. Under small opening conditions, the control signal generated by a fixed-gain PID might not be large enough to overcome the high static friction force. To improve PID controller performance, gain-scheduled PID control has been developed with different scheduling strategies [
7,
8,
9], which allows the PID control law to be adapted for systems that experience nonlinear dynamics. However, optimizing the scheduled PID gains to obtain the best performance is challenging. The classical tuning method combines the Ziegler–Nichols [
10] method and manual tuning in a heuristic method, making it difficult to achieve optimality, especially for nonlinear dynamic systems with gain-scheduled PID controllers. More advanced optimal design methods for PID control have been developed, including nonlinear PID [
11,
12,
13,
14,
15,
16], fuzzy PID [
17,
18,
19,
20,
21], etc.
This paper investigates how to automatically search and tune scheduled PID gains by utilizing system model knowledge and online data to optimize the closed-loop system performance of a nonlinear valve.
Genetic algorithms (GA) [
22,
23] can be used to solve the optimization problem of control gain tuning, especially for highly nonlinear systems, based on biological principles of natural selection and regeneration. Although GA search (optimization) does not guarantee achieving the global optimal solution in theory, it conducts a model-free search over a large parameter space. For the traditional single-objective genetic algorithm, there is only one predefined objective function to be optimized. However, to evaluate closed-loop system performance, performance indices such as the overshoot, settling time, and steady-state error need to be considered simultaneously with their trade-off relationships. One method is to combine these into a weighted sum to form a single objective optimization problem [
24,
25,
26]. In this way, the obtained optimal solution is dependent on the selected weightings. With advancements in multi-objective optimization methods [
27], this limitation can be overcome. The Non-Dominated Sorting in Genetic Algorithms-II (NSGA-II) method [
28] is one of the most well-known computationally efficient multi-objective optimization algorithms. The NSGA-II algorithm provides a Pareto-front set of solutions, allowing the decision-maker to observe the trade-off relations among different objectives and select a solution based on the desired performance requirements. This method improves the multi-objective optimization process, as there is no need to select weights for multiple performance criteria (see the early NSGA-II PID gain tuning studies [
29,
30,
31,
32] and other multi-objective optimization problems for more details [
33]).
Compared with a fixed-gain PID controller, performance improvements can be achieved by using scheduled gains for systems with high nonlinearity. Although tuning scheduled gains for the best performance introduces additional challenges over fixed-gain approaches, automatic tuning methods can be developed based on the NSGA-II search algorithm.
Two common control optimization processes are shown in
Figure 1, where the path with black arrows represents traditional offline processes and the one with blue arrows represents online processes. Based on the identified or physical system model, offline optimization can be conducted with efficient searching in the simulation environment. The optimal controller obtained from simulation study is then used on the test bench or physical system, assuming that the identified (or physical) model is accurate enough to represent the real system. However, as the modeling error can never be avoided, especially for systems with high nonlinear friction, a PID controller obtained from offline optimization may not provide satisfactory performance for the physical system. Although the system modeling accuracy can be improved with increased effort, it is impossible to eliminate the modeling error entirely. The online optimization method applies the NSGA-II algorithm directly during bench tests (see the red arrow in
Figure 1). To proceed with an intense search, a large population size with many generations is necessary, resulting in a massive number of test points. However, unlike simulation design, online global search is usually computationally infeasible due to the limitations of real-time microcontroller memory, computational capability, actuator durability, etc. In this paper, a co-optimization strategy is proposed using both offline and online information, as shown by the blue arrow in
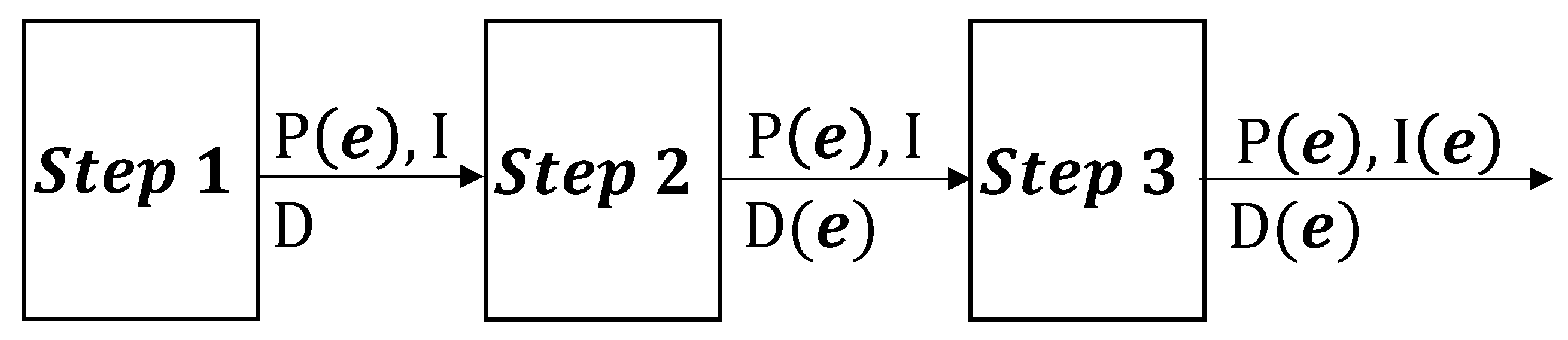
Figure 1. First, based on the advantages of offline global search, an optimal gain-scheduled PID controller is obtained based on adequate population size and deep generation using the offline model. The offline optimization result is then used as an initial condition for online optimization using an iterative NSGA-II algorithm. The PID controller is automatically tuned online with reduced computational cost based on the proposed iterative NSGA-II algorithm. Thus, the proposed approach combines the comprehensiveness of offline search and the authenticity of online search.
In this paper, a highly nonlinear friction EGR valve system is modeled analytically with nonlinear friction, and the scheduled PID gains are tuned based on the proposed NSGA-II optimization algorithm using the offline optimized control gains as the initial setting. The closed-loop system performance is then validated through simulations and experimental studies. The main contribution of this paper is three-fold. First, an offline model-assisted scheduled PID gain tuning method based on the NSGA-II algorithm is proposed. Offline optimization through the simulation study provides a good initial ‘guess’ for online optimization. Second, the scheduled PID gains are optimized using the NSGA-II algorithm with reduced scheduling parameters based on the test bench input and output responses to make the online optimization feasible in terms of time and actuator durability constraints. Lastly, the coordinated offline–online optimization process is implemented in a microcontroller and the closed-loop system performance is validated by both simulations and experimental studies.
The rest of this paper is organized as follows. In
Section 2, the detailed system model is depicted, experimentally validated, and used for offline optimization.
Section 3 formulates the optimization problem of control gain tuning with defined control gain functions, objective functions, and decision-making criteria.
Section 4 provides a step-by-step summary of the modified NSGA-II algorithm. In
Section 5, the simulations and experimental setups are introduced and optimization results are presented along with associated discussions. Finally,
Section 6 presents our conclusions and discusses future work.
2. Valve System Model
The nonlinear valve system architecture is shown in
Figure 2, where the angular displacement
, driven by a DC motor, is converted to the linear valve displacement
y using a constrained slide rail–rod structure. Based on the valve structure in
Figure 2, the relationship between
and
y can be expressed by (
1):
where
and
y are the radian degree and valve opening percentage (%), respectively. The slide rod angular position
is at the upright vertical position and the initial slide rod position is at
rad (10 degrees), corresponding to the fully closed valve position (
), meaning that when the valve is fully open (
), the angle
is
rad (80 degrees); see the dashed-line in
Figure 2.
The system moment of inertia
J is calculated in (
2), where
is the total rotational assembly moment of inertia,
is the equivalent moment of inertia of all the linear moving components at angular position
,
m is the total mass of linear moving part, and
r is the length of the slide rod connection arm.
The valve dynamics can be described by (
3) using Newton’s law.
where
and
represent the electric motor output torque and spring load torque, stated in (
4) and (
5), respectively;
and
are the motor torque and back EMF (electromagnetic fields) coefficients, respectively;
,
R, and
represent the armature voltage, motor winding resistance, and spring preload position, respectively;
is the nonlinear friction torque; and
denotes the nonlinear torque created by the constraint of sliding rail–rod structure based on (
6).
For the prominent nonlinear friction, the Stribeck friction model [
34,
35] is used, which calculates the friction force based on the relative speed between two contacted surfaces. Based on the Stribeck friction model, the friction torque
can be represented by (
7):
where
,
, and
are the Coulomb friction torque, static friction torque, and viscous friction torque coefficients, respectively, and
is the characteristic velocity.
To simplify the system identification process, the back EMF torque
is lumped into the term
in
, resulting in motor torque
, where
u is the control input. Note that the scaled PWM (Pulse Width Modulation) range of
u has been defined as
based on the software interface used for system test bench, presenting the full duty cycle range of the H-bridge output in the control unit. With
, the system dynamic equation is shown in (
8).
Model coefficient identification is challenging in nonlinear systems. Multiple tests were conducted to isolate the effects of different parameters. First, the controller gain
was obtained from valve specification data, then the spring stiffness
, spring preload
, and viscous friction were estimated by releasing the valve at different positions to generate the estimated Stribeck friction curve. Iterative calibrations were obtained by comparing the simulation and test responses to improve model accuracy. Based on the carefully calibrated model, two free falling cases (52.5% and 20.3% opening to 0%) were then compared using the experimental and model simulation results (Cases 1 and 2). In addition, the experimental closed-loop step response (0% opening to 50% opening, Case 3) using a PID controller (with gains P = 400, I = 0, and D = 0) was compared. The responses were closely matched (see
Figure 3), validating the modeling accuracy. Detailed model parameters are shown in
Table 1. The parameter units are omitted. as the system identification has been processed as “control input to system output”.
4. Non-Dominated Sorting Genetic Algorithm-II
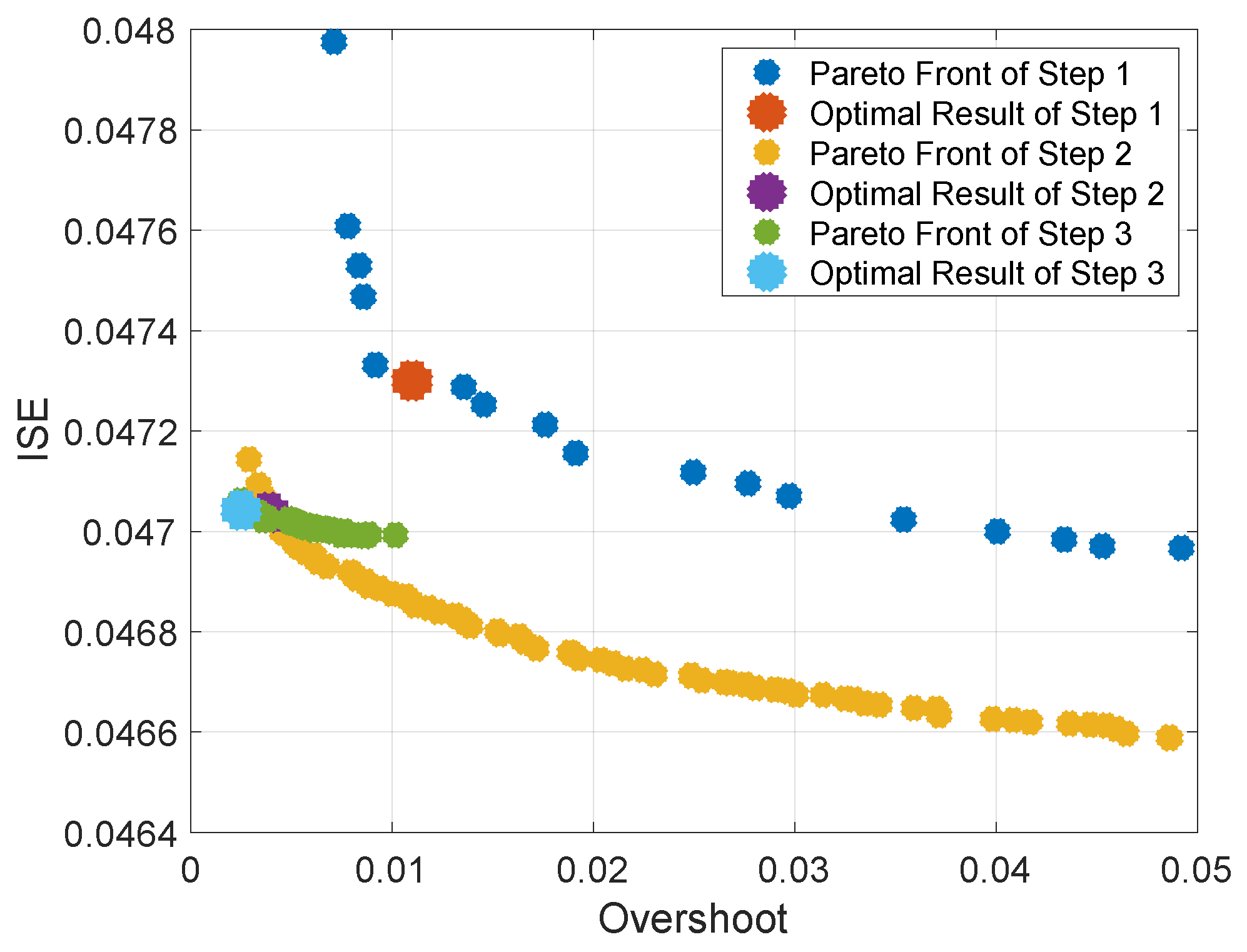
In the traditional approach, multiple-objective optimization problems can be converted to single-objective optimization problems by predefining the weighting for each objective function. Thus, the optimal solution depends crucially on the selected weights. In addition, certain profitable trade-off relationships may be ignored, as a slight sacrifice of one objective function may lead to a significant improvement in the others. Using a different approach, the NSGA-II algorithm selects the optimal solutions on a Pareto front, which includes multiple non-dominated solutions. The trade-off relationship between each objective can be clearly presented, allowing the decision-maker to pick the optimal solutions based on specific criteria. Note that there is no unique way to select the optimal individual solution among the nondominated solution set from NSGA-II, as the performance evaluation criteria vary with different requirements. In this work, reference point-based multiple-criteria decision-making (MCDM) [
36] is applied by considering the origin point as the reference point, with equal weights for objectives
and
. Thus, the point on the Pareto front with minimum distance to the origin (
) is selected as the ultimate solution.
The detailed NSGA-II optimization method implemented in this paper is described below, along with the parameters predefined for calibrating the PID scheduled gains; see [
28,
33] for details.
- 1.
Initialization: Letting , the initial parent population is generated with size . For each individual, all decision variables are randomly generated among the related search space with .
- 2.
Nondomination sorting: The resulting individual is evaluated based on the nondomination level with the nondomination rank (rank 1 is the best level, rank 2 is the next-best level, etc.) assigned.
- 3.
Offspring generation: The usual binary tournament selection is applied, with binary crossover at probability and distribution index, polynomial mutation at probability, and distribution index for generating an offspring population with size equal to .
- 4.
Combination and sorting: An extended set is generated by combining
and
with a size of
. After nondominated sorting (as stated in Step 2), selection starts from low ranked individuals and continues to form a new population
of size
until it is filled. If the rank of multiple individuals is the same and the remaining space in
is limited, individuals with larger crowding distance have priority in selection; for further details on crowding distance, see [
28]. Lastly, the new population set
is filled with the selected individuals.
- 5.
Iteration: After updating the generation , Steps 2 to 4 are repeated until the stopping criterion is satisfied.
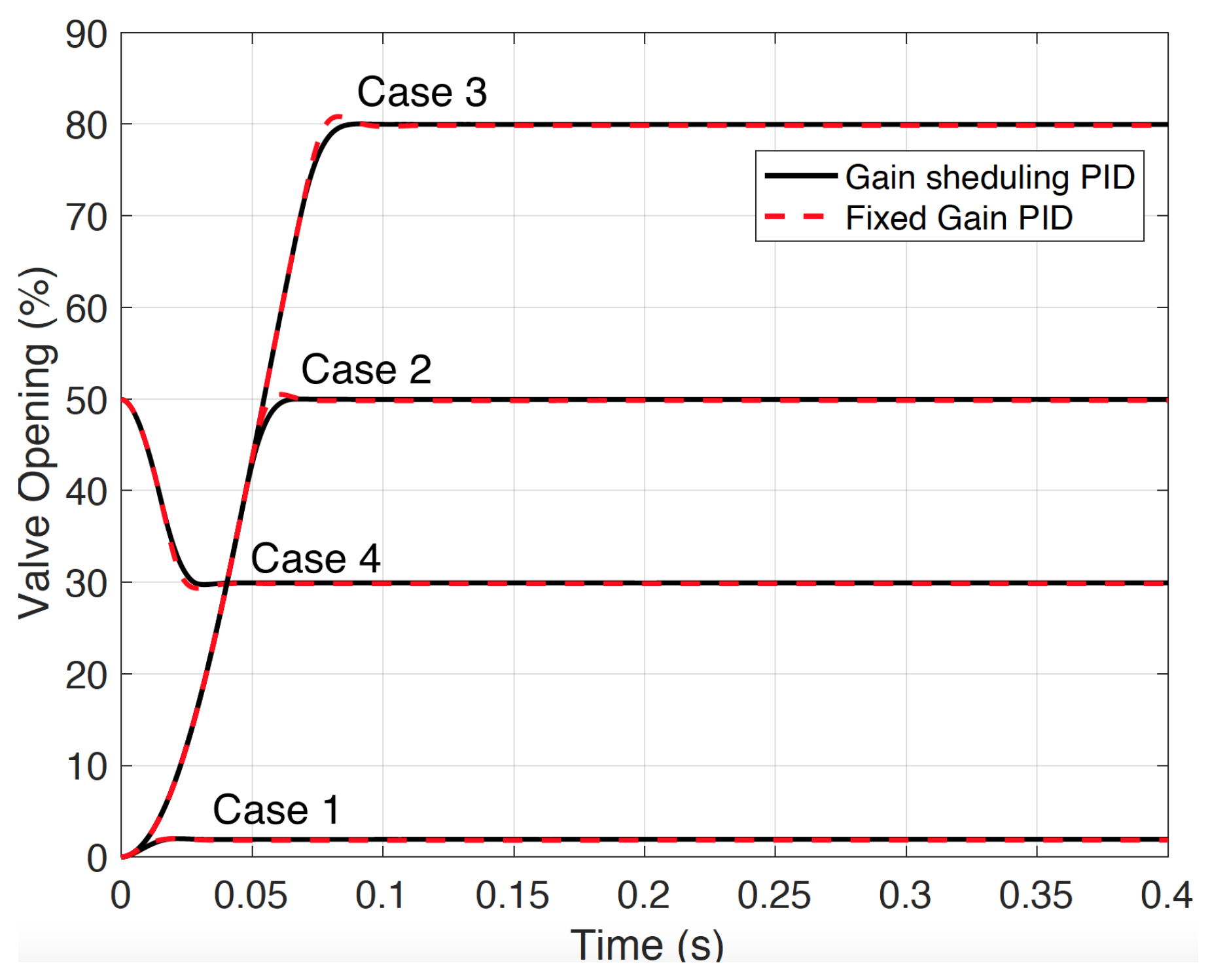
To demonstrate the advantages of the gain-scheduled PID controller, a fixed-gain PID controller was optimized for the high static friction model using NSGA-II. To ensure a fair comparison, an identical search space, population, and generation size to the gain-scheduled case were selected.
8. Conclusions and Future Work
In this paper, we have presented an offline model-assisted online optimization method to automatically tune the gain-scheduled PID gains for an exhaust gas recirculation (EGR) valve with large nonlinear friction. The optimized gain-scheduled PID controller can adaptively compensate for the increased friction force in low-velocity regions. In the optimization problem, two objective functions are proposed to consider commonly used performance indices such as the settling time, overshoot, and steady-state error. The NSGA-II optimization results can provide decision-makers with a Pareto front that clearly shows the trade-offs. The optimal initial gain-scheduled functions are obtained using the multi-objective NSGA-II algorithm, eliminating the process of manually tuning control gains. Next, the proposed online iterative NSGA-II optimization approach is used to further optimize the closed-loop system performance, significantly reducing the need for bench tests. Our experimental results show that the proposed automatically tuned optimal gain-scheduled PID controller has better overall performance than a fixed-gain controller.
In future work, the proposed algorithm based on offline and online co-optimization can be extended to optimize advanced controllers, such as model predictive control and learning-based control. Although this paper provides a meaningful attempt to combine prior model knowledge with black-box online learning, it is interesting and worthwhile to develop analytical tools to study the resulting system’s robustness and optimality. Earlier work on model-based control can provide useful insights in this direction [
37]. Of particular interest, constraints on states and control inputs as well as learning-based control can be further included in the proposed algorithm to enable computationally efficient tuning of online-learning control. In addition, comparison studies with other data-driven PID automatic tuning algorithms, such as the Monte Carlo method, are meaningful and will be part of our future work.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}