
Image Recognition Method for Micropores Inside Small Gas Pipelines



Abstract
:1. Introduction
2. Dataset Creation
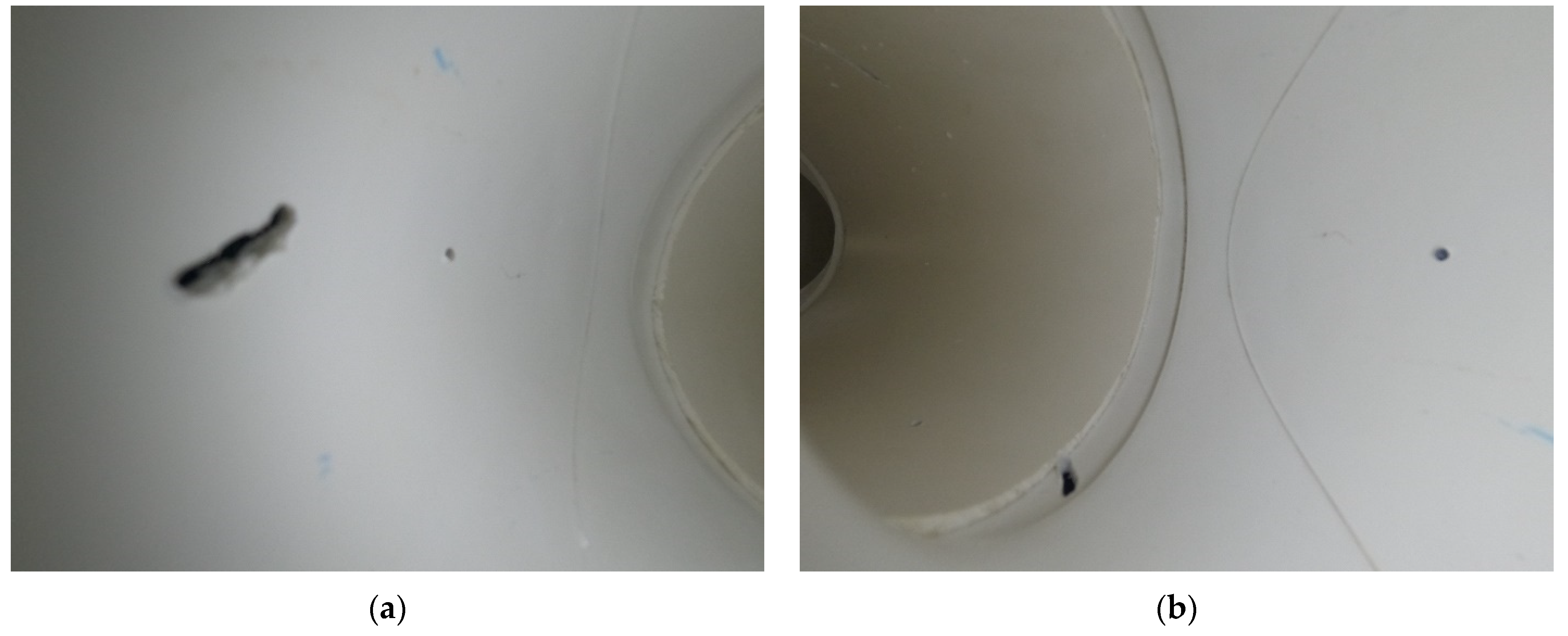
2.1. Image Acquisition
2.2. Dataset Creation
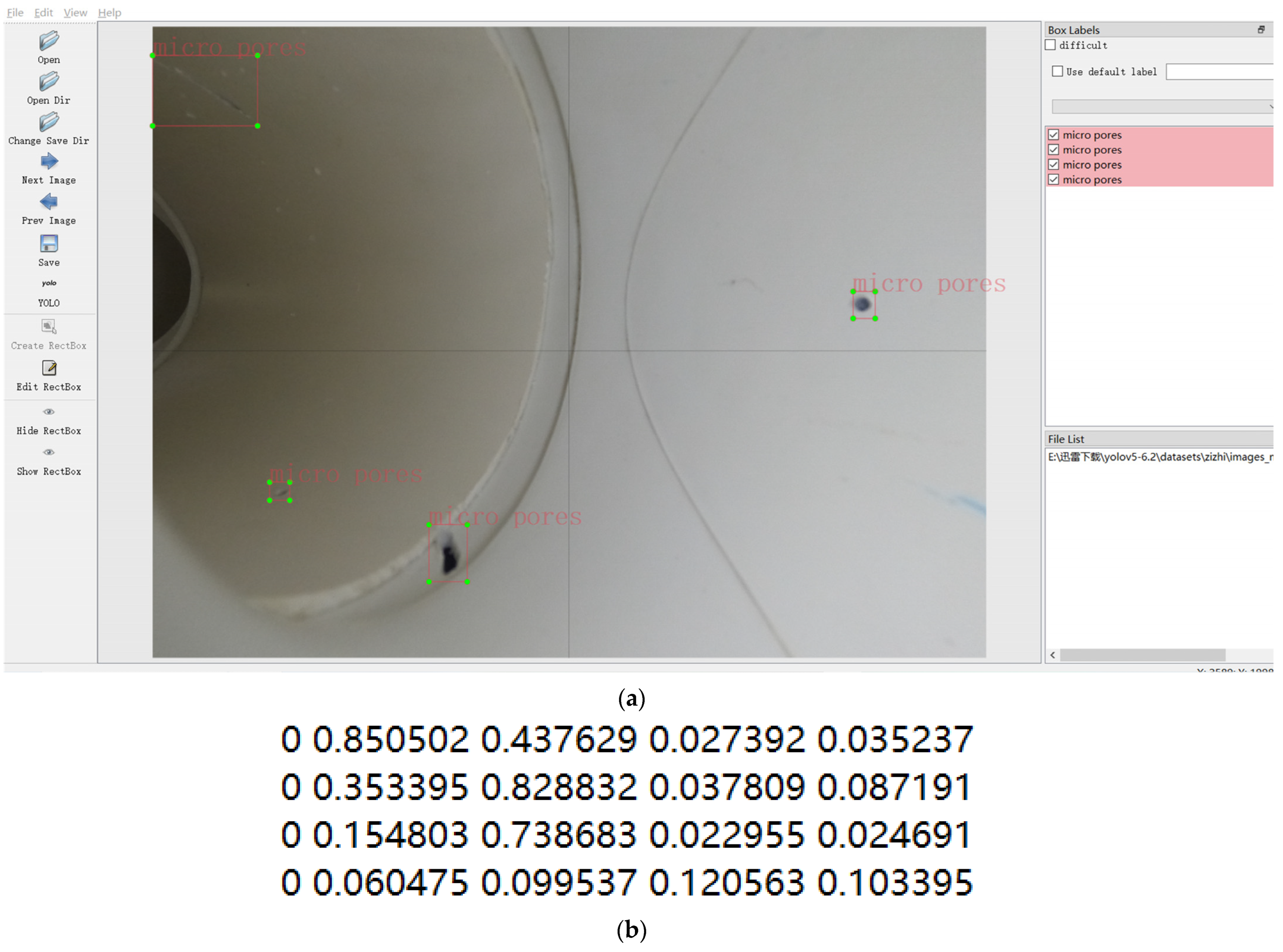
2.3. Annotation of Data Sets
3. Construction of Micropores Identification Network Model
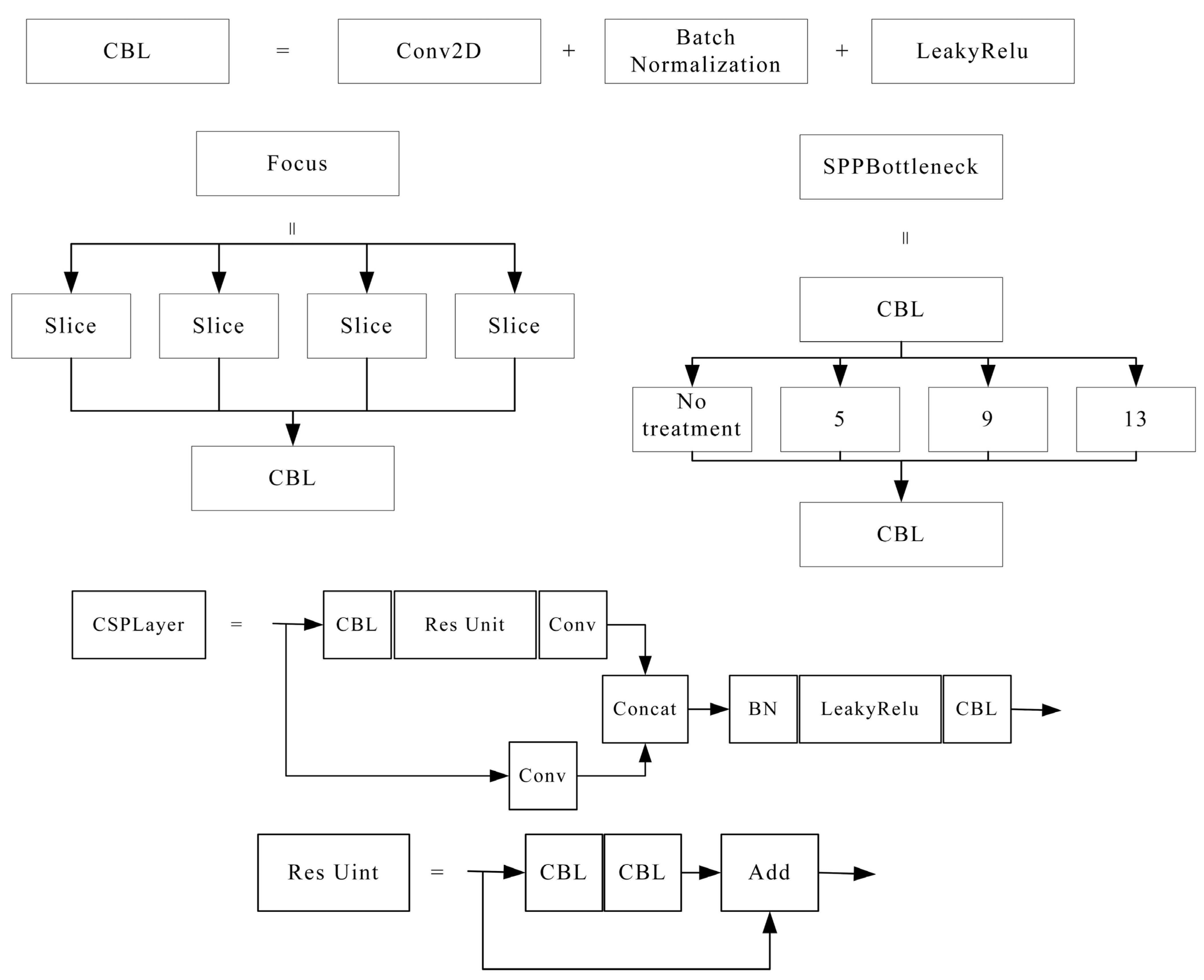
3.1. YOLOv5s Algorithm
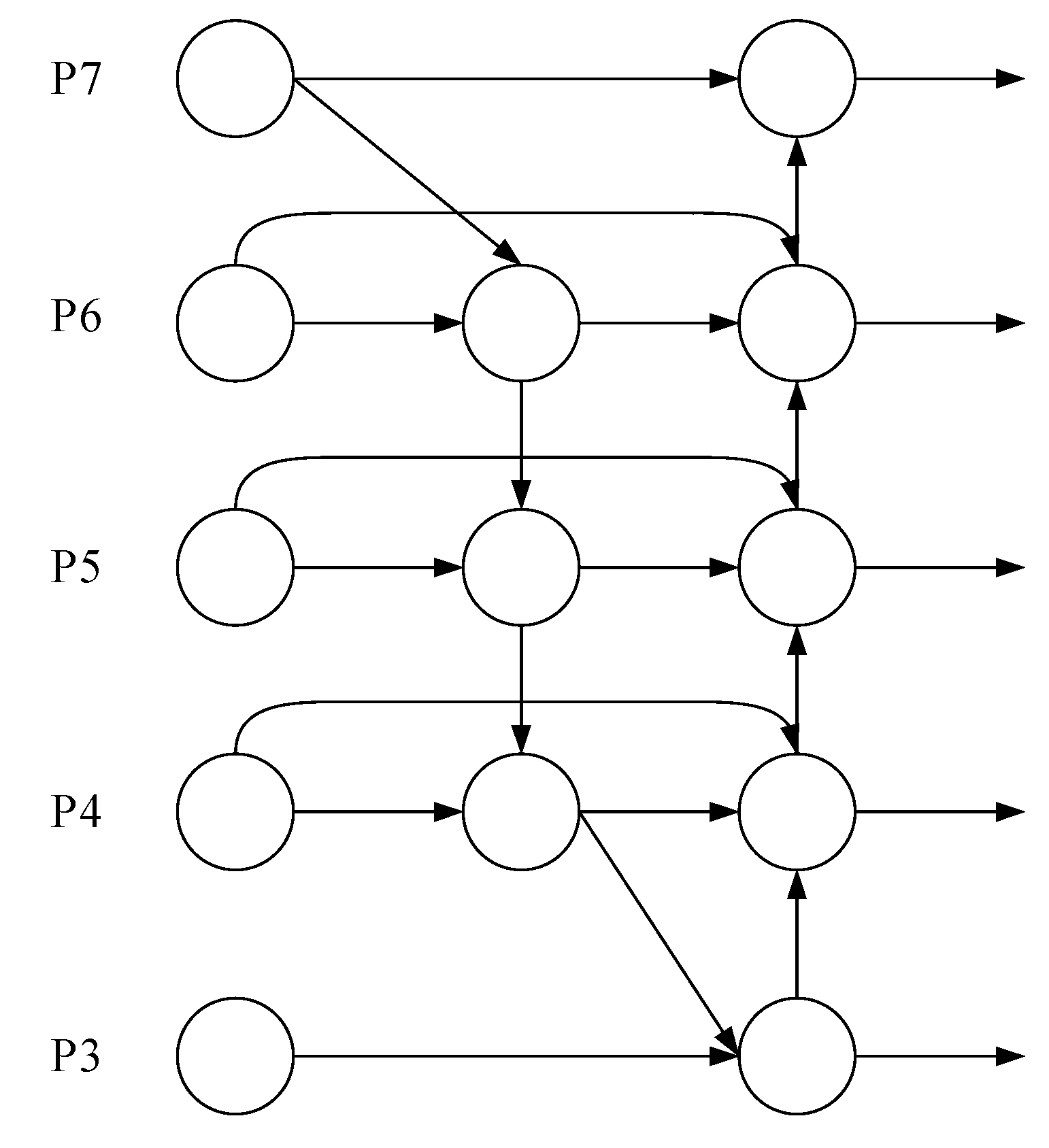
3.2. Construction of the Neck Layer
3.3. Construction of the Head Layer
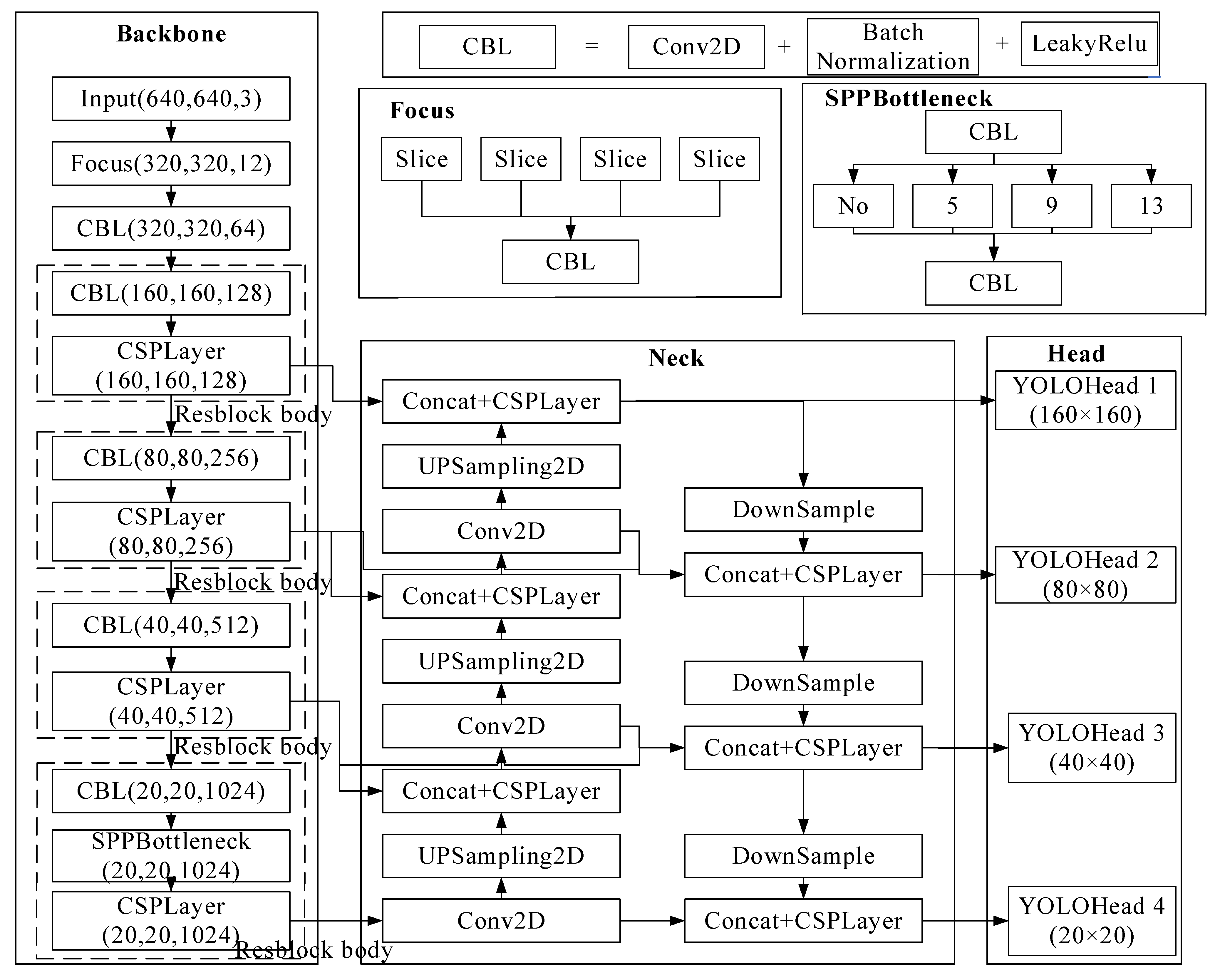
3.4. Microfine Pore Image Recognition Network Model Structure
4. Results
4.1. Experimental Conditions
4.1.1. Experimental Environment
4.1.2. Training Parameters
4.1.3. Evaluation Indicators
4.2. Training Curve Results and Analysis
4.3. Analysis of Comparative Experimental Results
4.4. Ablation Experiments and Analysis of Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, K.; Qian, X.; Liu, Z. Experimental and numerical investigations on predictor equations for determining parameters of blasting-vibration on underground gas pipe networks. Process Saf. Environ. Prot. 2020, 133, 315–331. [Google Scholar] [CrossRef]
- Natalya, V.; Aleksander, S.; Svetlana, K. Possibilities of diagnosis of stress corrosion cracking of main gas pipelines from the point of view of microbiology. Mater. Today Proc. 2020, 38, 1697–1700. [Google Scholar]
- Li, X.; Zhang, Y.; Abbassi, R. Dynamic probability assessment of urban natural gas pipeline accidents considering integrated external activities. J. Loss Prev. Process Ind. 2021, 69, 104388. [Google Scholar] [CrossRef]
- Malekpour, A.; She, Y. Real-time leak detection in oil pipelines using an Inverse Transient Analysis model. J. Loss Prev. Process Ind. 2021, 70, 104411. [Google Scholar] [CrossRef]
- Qiao, Z.; Guo, Q.; Sun, H. An interval gas flow analysis in natural gas and electricity coupled networks considering the uncertainty of wind power. Appl. Energy 2017, 201, 343–353. [Google Scholar] [CrossRef]
- Tian, X.; Jiao, W.; Liu, T. Leakage detection of low-pressure gas distribution pipeline system based on linear fitting and extreme learning machine. Int. J. Press. Vessel. Pip. 2021, 194, 104553. [Google Scholar] [CrossRef]
- Morteza, Z.; Mehdi, S.; Karim, S. Pipeline leakage detection and isolation: An integrated approach of statistical and wavelet feature extraction with multi-laver perceptron neural network (MLPNN). J. Loss Prev. Process Ind. 2016, 43, 479–487. [Google Scholar]
- Xiao, R.; Joseph, P.; Muggleton, J. Limits for leak noise detection in gas pipes using cross correlation. J. Sound Vib. 2022, 520, 116639. [Google Scholar] [CrossRef]
- Jia, Z.; Ho, S.; Li, Y. Multipoint hoop strain measurement based pipeline leakage localization with an optimized support vector regression approach. J. Loss Prev. Process Ind. 2019, 62, 103926. [Google Scholar] [CrossRef]
- Tariq, S.; Bakhtawar, B.; Zayed, T. Data-driven application of MEMS-based accelerometers for leak detection in water distribution networks. Sci. Total Environ. 2022, 809, 151110. [Google Scholar] [CrossRef]
- Meribout, M.; Khezzar, L.; Azzi, A. Leak detection systems in oil and gas fields: Present trends and future prospects. Flow Meas. Instrum. 2020, 75, 101772. [Google Scholar] [CrossRef]
- Wang, X.; Lin, J.; Keramat, A. Matched field processing for leak localization in a viscoelastic pipe:an experimental study. Mech. Syst. Signal Process. 2019, 124, 459–478. [Google Scholar] [CrossRef]
- Diao, X.; Chi, Z.; Jiang, J. Leak detection and location of flanged pipes: An integrated approach of principle component analysis and guided wave mode. Saf. Sci. 2020, 129, 104809. [Google Scholar] [CrossRef]
- Kasai, N.; Tsuchiya, C.; Fukuda, T. Propane gas leak detection by infrared absorption using carbon infrared emitter and infrared camera. Nondestruct. Test. Eval. Int. 2011, 44, 57–60. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, X.; Cao, G. ViT-YOLO: Transformer-Based YOLO for Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2016; pp. 2799–2808. [Google Scholar]
- Zhang, K.; Wu, Y.; Wang, J. Semantic context-aware network for multiscale object detection in remote sensing images. IEEE Geosci. Remote Sens. Lett. 2021, 45, 1–5. [Google Scholar] [CrossRef]
- Zhang, K.; Cao, Z.; Wu, J. Circular Shift: An Effective Data Augmentation Method for Convolutional Neural Network on Image Classification. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Abu Dhabi, United Arab Emirates, 25–28 October 2020; pp. 1676–1680. [Google Scholar]
- Gupta, A.; Vedaldi, A.; Zisserman, A. Synthetic Data for Text Lacalisation in Natural Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 2315–2324. [Google Scholar]
- Zhao, K.; Zhao, L.; Zhao, Y.; Deng, H. Study on Lightweight Model of Maize Seedling Object Detection Based on YOLOv7. Appl. Sci. 2023, 13, 7731. [Google Scholar] [CrossRef]
- Cao, L.; Song, P.; Wang, Y.; Yang, Y.; Peng, B. An Improved Lightweight Real-Time Detection Algorithm Based on the Edge Computing Platform for UAV Images. Electronics 2023, 12, 2274. [Google Scholar] [CrossRef]
- Tian, Z.; Huang, J.; Yang, Y.; Nie, W. KCFS-YOLOv5: A High-Precision Detection Method for Object Detection in Aerial Remote Sensing Images. Appl. Sci. 2023, 13, 649. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, L.; Han, T.; Xu, S.; Liu, Y.; Fu, J. High-Accuracy Insulator Defect Detection for Overhead Transmission Lines Based on Improved YOLOv5. Appl. Sci. 2022, 12, 12682. [Google Scholar] [CrossRef]
- Glučina, M.; Anđelić, N.; Lorencin, I.; Car, Z. Detection and Classification of Printed Circuit Boards Using YOLO Algorithm. Electronics 2023, 12, 667. [Google Scholar] [CrossRef]
- Xiao, Q.; Yu, W. Traffic sign detection in complex environment based on improved YOLOV3. Int. Core J. Eng. 2021, 7, 102–108. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D. SSD: Single Shot Multibox Detector. In European Conference on Computer Vision; Springer: Berlin, Germany, 2016; pp. 21–37. [Google Scholar]
- Ren, S.; He, K.; Girshick, R. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Environment Name | Parameters |
|---|---|---|
| 1 | Operating system | Win10 |
| 2 | CPU | Inter Core i5-13600 |
| 3 | GPU | NVIDIA RTX 3060 |
| 4 | Programming software | Pycharm2022.2.3 |
| 5 | Deep learning framework | Pytorch1.13.0 |
| 6 | Programming language | Python3.8 |
| Serial Number | Parameter Name | Numerical Size |
|---|---|---|
| 1 | Weight | Random |
| 2 | Epoch | 300 |
| 3 | Image size | 640 × 640 × 3 |
| 4 | Batch size | 16 |
| 5 | Optimizer | SGD |
| 6 | Workers | 8 |
| 7 | Warm-up | Yes |
| Network Model | Precision/% | Recall/% | AP/% |
|---|---|---|---|
| SSD | 88.5 | 86.3 | 87.2 |
| YOLOv3 | 87.8 | 85.9 | 86.7 |
| YOLOv5s | 89.6 | 87.6 | 88.4 |
| Faster RCNN | 91.8 | 93.4 | 92.5 |
| Our method | 94.7 | 96.6 | 95.5 |
| Network Model | Precision/% | Recall/% | AP/% |
|---|---|---|---|
| YOLOv5s | 89.6 | 87.6 | 88.4 |
| YOLOv5s + BiFPN | 92.4 | 90.7 | 91.4 |
| YOLOv5s + small target detection layer | 91.6 | 92.9 | 92.2 |
| Our method | 94.7 | 96.6 | 95.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Su, Z.; Zhou, H.; Lin, J. Image Recognition Method for Micropores Inside Small Gas Pipelines. Appl. Sci. 2023, 13, 9697. https://doi.org/10.3390/app13179697
Zhao Y, Su Z, Zhou H, Lin J. Image Recognition Method for Micropores Inside Small Gas Pipelines. Applied Sciences. 2023; 13(17):9697. https://doi.org/10.3390/app13179697
Chicago/Turabian StyleZhao, Yuxin, Zhong Su, Hao Zhou, and Jiazhen Lin. 2023. "Image Recognition Method for Micropores Inside Small Gas Pipelines" Applied Sciences 13, no. 17: 9697. https://doi.org/10.3390/app13179697
APA StyleZhao, Y., Su, Z., Zhou, H., & Lin, J. (2023). Image Recognition Method for Micropores Inside Small Gas Pipelines. Applied Sciences, 13(17), 9697. https://doi.org/10.3390/app13179697