1. Introduction
A number of different modeling techniques that are capable of representing the nonlinear behavior of physical devices have been proposed and, for each of these, there are sophisticated techniques for identifying the parameters that characterize the modeling technique.
Modeling techniques of nonlinear devices can be grouped into three main categories that differ in the level of knowledge of the physical phenomenon that is represented in the model itself. The so-called white-box approaches require complete knowledge of the physics governing the nonlinear system [
1]. Examples of these techniques are those that define the model of the real physical system by making use of differential equations [
2] or wave digital filters [
3,
4].
The complexity of a physical system often makes it necessary to carry out simplification techniques. Depending on the degree of simplification, the techniques are considered to be part of the grey box or black box approaches. The grey box techniques imply partial knowledge of the physical phenomenon [
5,
6], for example, in [
7,
8]; the black box techniques, which in fact are among the most widely adopted, do not require prior knowledge of the physics of the system and the device is defined through its input–output relation [
1,
9]. In the following, only nonlinear systems of the black box type are considered.
In the case of black box techniques, the most widely adopted model is the Volterra series [
10,
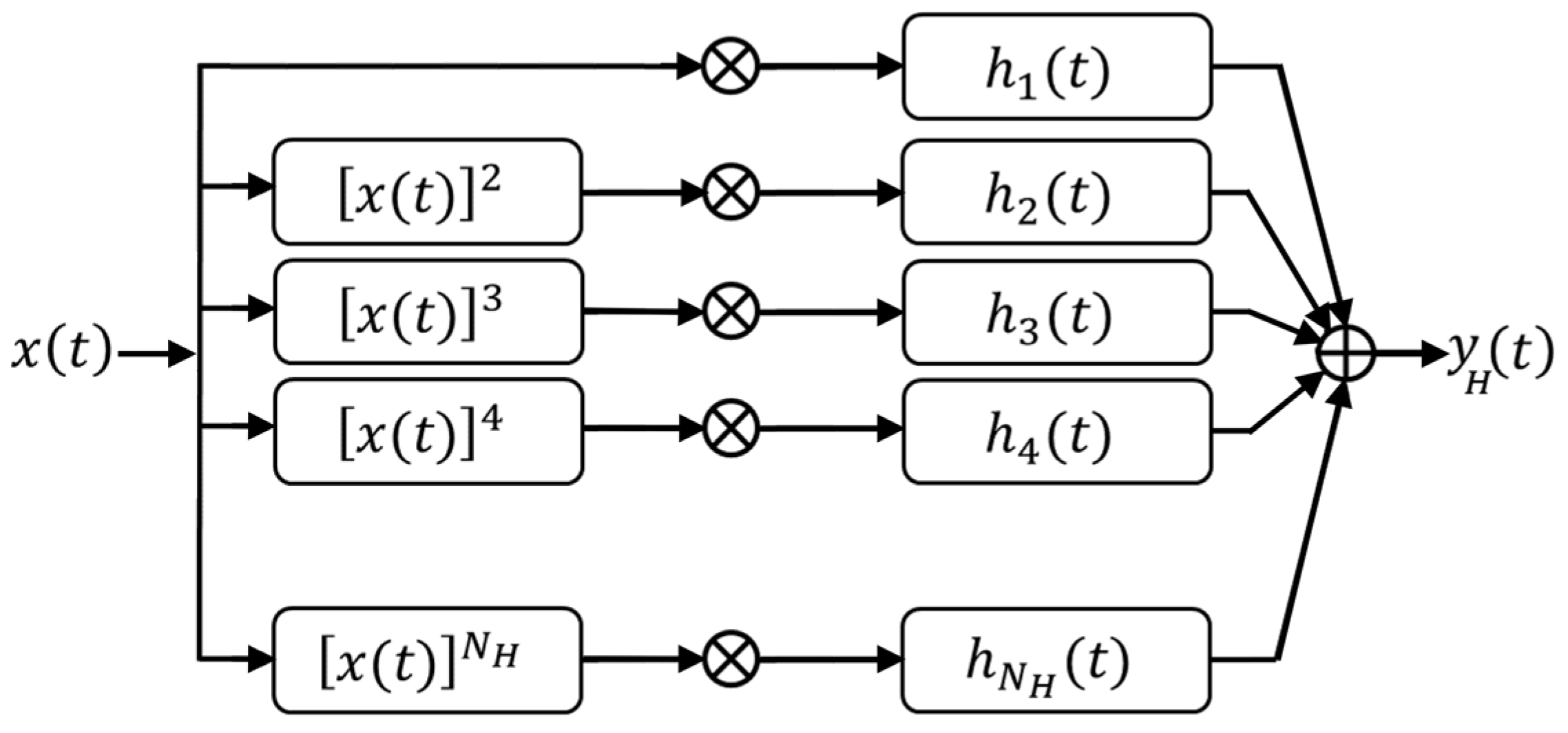
11]. For practical reasons, the series must be truncated to bring the number of model parameters to a finite number. Even in the case of a truncated Volterra series, the number of coefficients needed to define the model quickly becomes very large as the degree of the model increases. This becomes a serious limitation in that, in practice, it allows this technique to be used only with systems characterized by a limited degree of nonlinearity. Simplified models with respect to the Volterra series have been studied to deal with cases of strong nonlinearities. Among them, the Hammerstein and Wiener models are based on a split between a part of the model representing the dynamics of the response through linear filters, and a part of the model representing the nonlinear part of the response, which is considered static. In this way, these models provide accurate, though less general, representations of nonlinear systems even in the case of high-degree nonlinearities [
12,
13].
There are numerous techniques in the technical literature for identifying such models [
14,
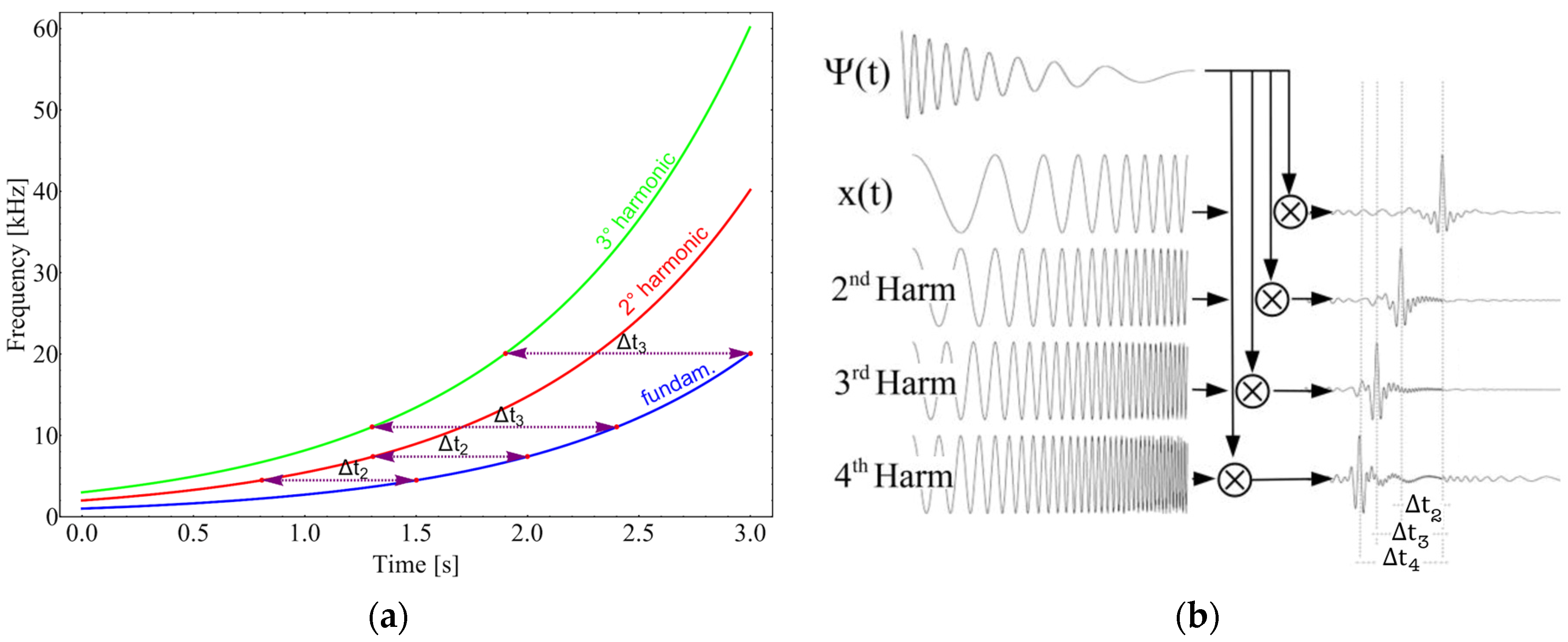
15], and in particular, in the case of the Hammerstein model, a technique that has proven to be particularly effective is based on the use of appropriate swept-sine signals as input [
16,
17,
18,
19]. This technique has yielded excellent results in numerous application areas, including acoustics and nondestructive testing and evaluation [
20,
21,
22,
23].
The excellent results achieved with this identification technique are, however, always related to integral analyses performed in the frequency domain. The results of this identification method appear to be less brillant with regard to the time behavior of the model response, or equivalently of the impulse response of the filters present in the different branches associated with the different orders of the model. Anomalies in the time response are often found, among which the most frequent is related to oscillations at transitions.
Artifacts of this type are known in the technical literature as Gibbs artifacts, and they manifest themselves in the form of spurious oscillations in the time domain response. It is well known that the cause of the occurrence of such spurious oscillations comes from bandwidth limitations of the performed measurements [
24,
25].
In the present paper, the focus is on the optimization of the Hammerstein’s model identification procedure for the purpose of the optimization of its results as seen in the time domain. To this end, the entire identification procedure is revisited in order to verify the adequacy of the frequency band of each of the components that contribute to the identification procedure. A possible cause of criticality is identified in the choice of the parameters characterizing both the swept-sine signal used as excitation and the corresponding matched filter; the consequent criteria for choosing these parameters to optimize the response of the model even in the time domain are hypothesized.
The proposed solution is verified through experimental tests in simulation; the tests are defined by making use of a simulated nonlinear system so that the expected ideal response is known, and this allows the effectiveness of the proposed solution to be verified. The results of these experiments fully confirm the hypothesis made; consequently, in this paper, we provide clear guidance for choosing the signal parameters to be used in applying the identification procedure.
This paper is organized as follows: In
Section 2.1, the Hammerstein’s model of nonlinear systems is briefly described and its identification procedure based on the use of exponential swept-sine signals as input is presented. In
Section 2.2, we analyze the identification procedure based on swept-sine signals in the frequency domain and we highlight the features of the identification procedure that have the potential to lead to frequency limitations in the functions describing the responses of the individual filters of the Hammerstein model. We then identify the possible causes of the above limitations and propose a possible solution. In
Section 3, we define an experiment to test the reliability of the assumption made about the causes of the limitations in the identification procedure and to identify the characteristics that the exponential swept-sine input signal is required to possess in order to enable accurate characterizations, in both the time and frequency domains of the linear filters present in the Hammerstein model to be identified. In
Section 4, we discuss the results obtained. In
Section 5, we draw conclusions and indicate possible evolution of the work.
3. Results
The consequences of the aspects that were highlighted in the previous section need to be verified experimentally. To this end, a specific synthetic experiment, described later in this section, was defined to verify the correctness of the observations made in the previous section regarding the bandwidth of the signals involved in the identification step carried out by means of the PuC technique, and to analyze what consequences the choices made on the frequency bands of these signals have on the quality of the Hammerstein model identification result. The choice was made that the simulated nonlinear physical system defined for the experiment was constructed following the exact Hammerstein model. The reason for this choice is that, as a result, the reference transfer functions, , of each branch, or, equivalently, the corresponding functions, , are known to us. The ideal parameters to which the identification procedure should strive are known. The PuC identification technique is applied to this simulated physical system in order to obtain, through the identification procedure, an estimate of the different branch functions of the model. Knowledge of the ideal reference trend of the or functions allows us to compare these reference trends with the corresponding trends obtained through the identification technique. Thus, it is possible to verify the impact of different choices of the parameters of the identification procedure on the quality of the result obtained.
The nonlinear physical system was defined by simulating it through a Hammerstein structure. Then, since the ideal functions
were known, it was possible to calculate the output corresponding to the exponential swept-sine signal at the input. Through the PuC technique, the
functions were estimated, their equivalent
functions evaluated in the frequency domain and, from these, the
functions (and thus the
). The PuC estimate of the ideal
is obtained through Relation (12), which is the inverse of Relation (11):
A comparison of the amplitude responses of the estimated functions obtained from by applying (12) on the results obtained in simulation, comparing the moduli, and the ideal or a comparison of the corresponding time functions and give us an indication of the effects of the choice of parameters adopted in the PuC identification technique.
The system considered in our simulation experiment is a fifth-order Hammerstein system at the input of which an exponential swept-sine signal was input, sampled at 300 kHz, extending in the frequency range from 300 Hz to 10 kHz, with a growth rate L = 0.16583. Consequently, the exponential swept-sine signal duration from to is calculated to be T = 0.5815 [s] while the duration up to the frequency is T = 0.8484 [s].
On the five branches of the nonlinear system simulated through a Hammerstein model, bandpass filters of different types and order were placed: on branches 1, 3, and 5, Butterworth-aligned bandpass filters of orders 6, 4, and 2, respectively; on branches 2 and 4, Chebyshev-aligned bandpass filters of orders 5 and 3, respectively. The cutoff frequencies of all five bandpass filters are 300 Hz and 20 kHz for the lower and upper cutoff frequencies; the high end cutoff frequency is twice
, therefore, that there are significant components of the amplitude responses up to the frequency
. All parameters used to define the simulated system in accordance with Hammerstein model are given in
Table 1. The simulations were carried out using the software Mathematica™.
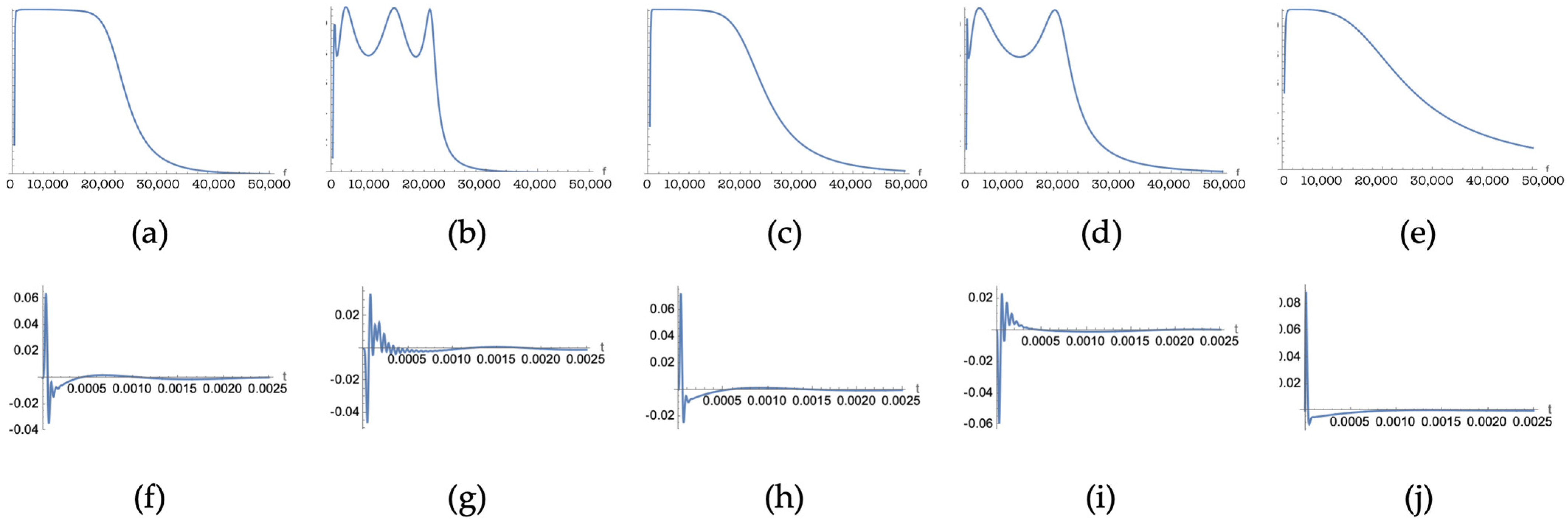
Figure 9 shows, on the first line, the five amplitude responses of the filters that were inserted into the branches of the Hammerstein structure that represent the nonlinear system in the simulation. The second line of
Figure 9 shows the corresponding five impulse responses. The curves on the two rows are our references in the frequency and time domains, respectively.
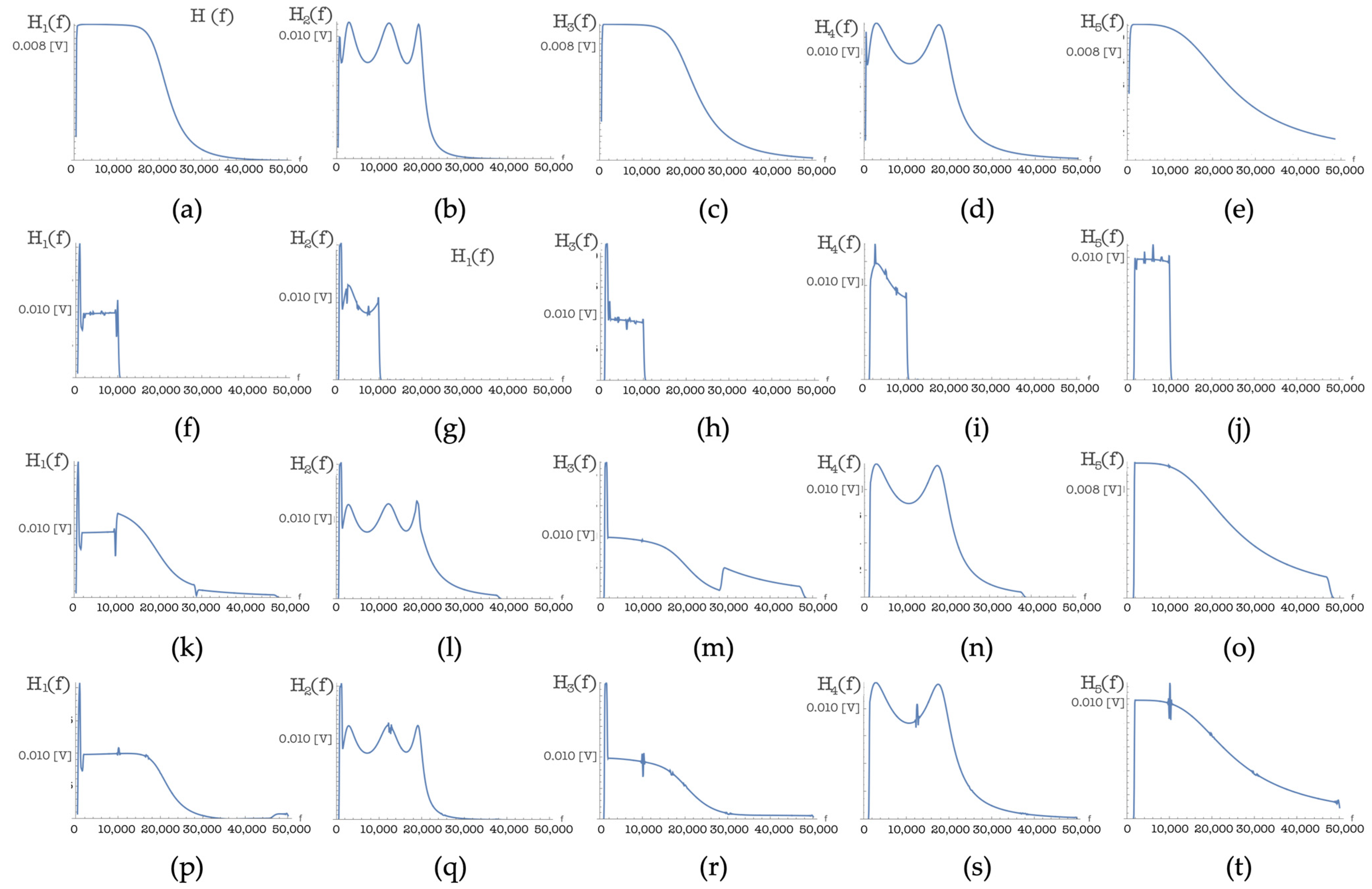
Figure 10 compares the results obtained by applying the PuC procedure of model identification, viewed in terms of estimating the frequency responses of the filters on the five branches of the model itself, according to the three different procedures described above for the choice of frequency bands adopted for the exponential swept-sine signal at the input and for the corresponding matched filter. The three procedures can be summarized as follows: All have as their starting point the frequency range from
to
, within which the nonlinear system must operate. Specifically, for Procedure 1, the exponential swept-sine input test signal is defined in the range from
to
and the matched filter operates in the same frequency range; for Procedure 2, the range of the exponential swept-sine input test signal goes from
to
, while the matched filter covers the frequency range from
to
; for Procedure 3, both the exponential swept-sine test signal at the input and the impulse response of the matched filter cover the frequency range from
to
.
In the case of Procedure 1 (panels “f” to “j”), it is evident that the amplitude response estimation is strictly limited to the maximum frequency
(10 kHz in the experiment) common to the exponential swept-sine signal and the matched filter, and this is in line with what was assumed following the observation of
Figure 6.
In the case of Procedure 2 (panels “k” to “o”), the trends exhibit discontinuities at frequency multiple integers of
. For example, panel “k” shows a discontinuity at
(10 kHz) and an additional discontinuity at 3
(30 kHz). The trends between one discontinuity and the next are not in line with the desired ideal trend of the amplitude response (first row). This result confirms two aspects highlighted earlier. It confirms the considerations made in correspondence to
Figure 7, which show that, in this case, the different functions,
are characterized in frequency bands that are different from each other, and therefore, only up to
are all the components that must add up present, while in higher frequency bands the lower order functions
are not defined and the combination occurs in the absence of some contributions that would be essential. A second aspect that is evidenced by examining the panels from “k” to “o,” is that only some of the components enter into the combination, as evidenced by the structure of matrix
in Relation (12). The
functions that combine to give rise to the first order function,
, are all the
components of odd index starting from
, and thus, the frequencies at which the components will be involved are odd integer multiples of
(10 kHz, 30 kHz, …); for
of higher orders, given the upper triangular structure of the
combination matrix, the
functions that will combine will be those of indices k to OrdMax, and therefore, discontinuities in the combination will occur at higher frequencies. For example, in
the first discontinuity occurs at 2
(20 kHz) and the next discontinuity occurs at 4
(40 kHz); in the case of
the first discontinuity is found at 3
(30 kHz) and the next discontinutiy is found at 5
(50 kHz).
In the case of identification Procedure 3 (panels “p” to “t”), the trends faithfully reflect throughout the frequency band of interest the ideal trends. It is evident that the result comes from the combination of several components and, in fact, at frequency multiples of , small irregularities are found; however, the overall trend is consistent with the ideal reference, and this denotes that there is a correct combination of all the necessary components. The only aspect that merits some further investigation concerns the peak found at the minimum frequency .
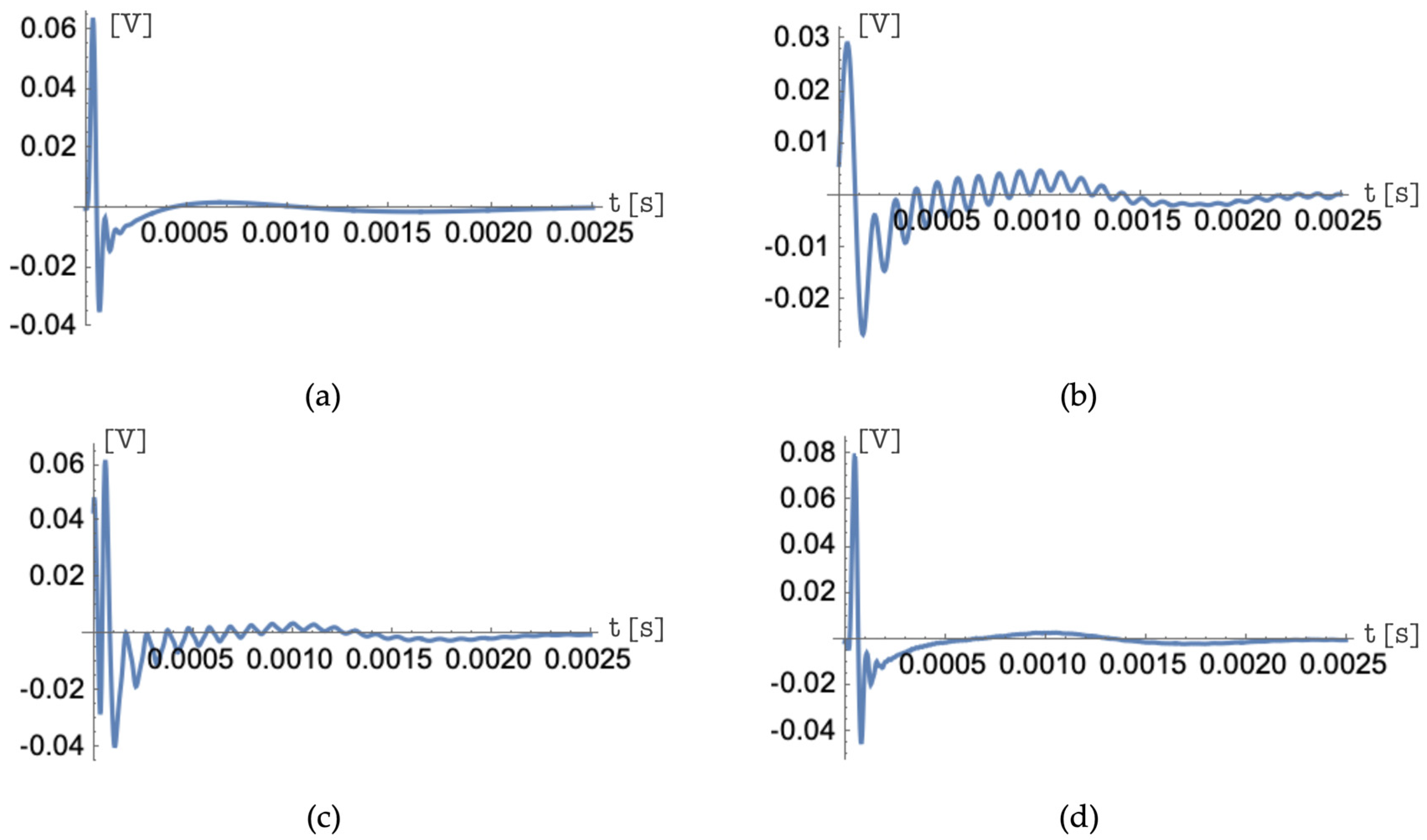
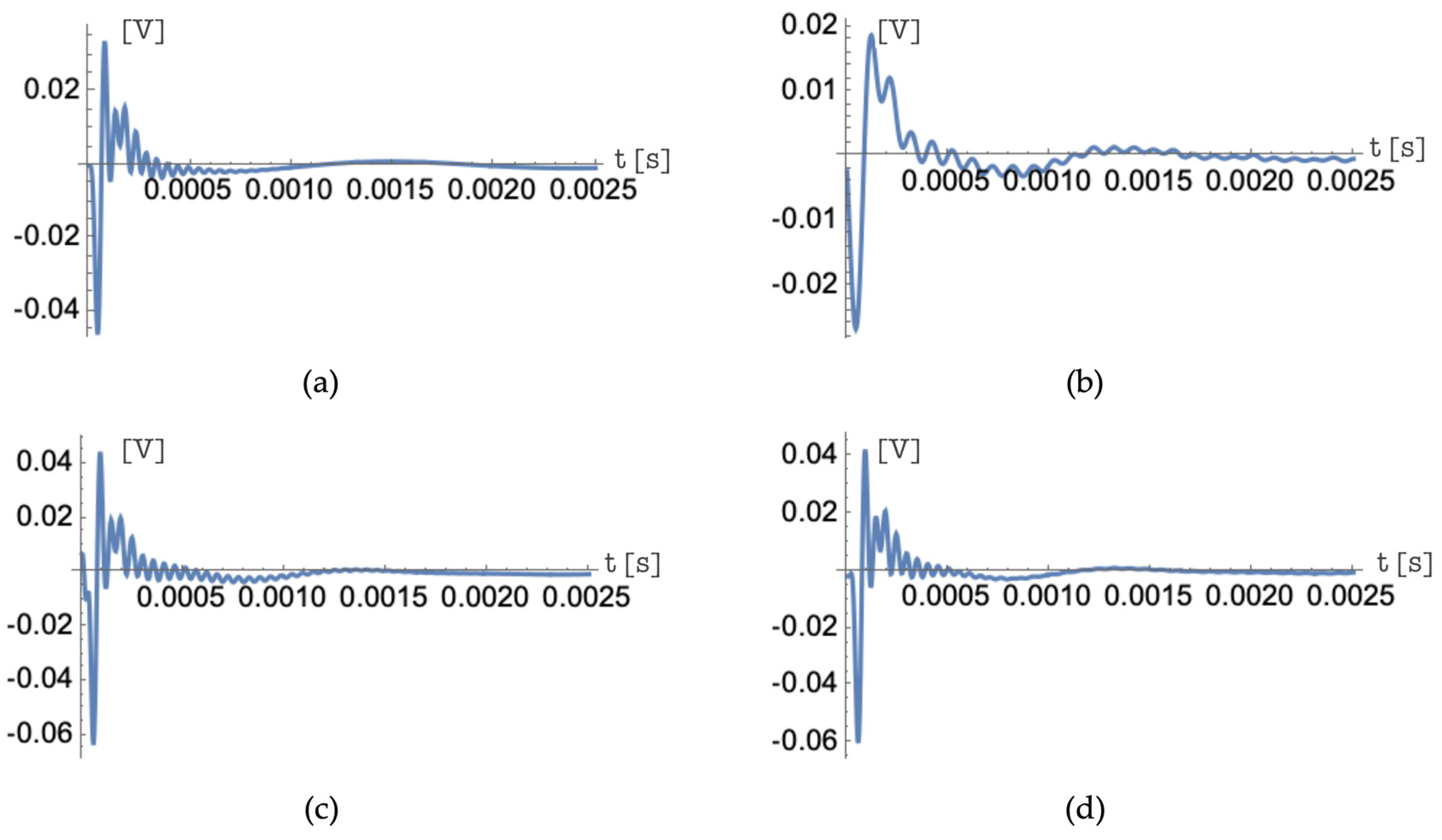
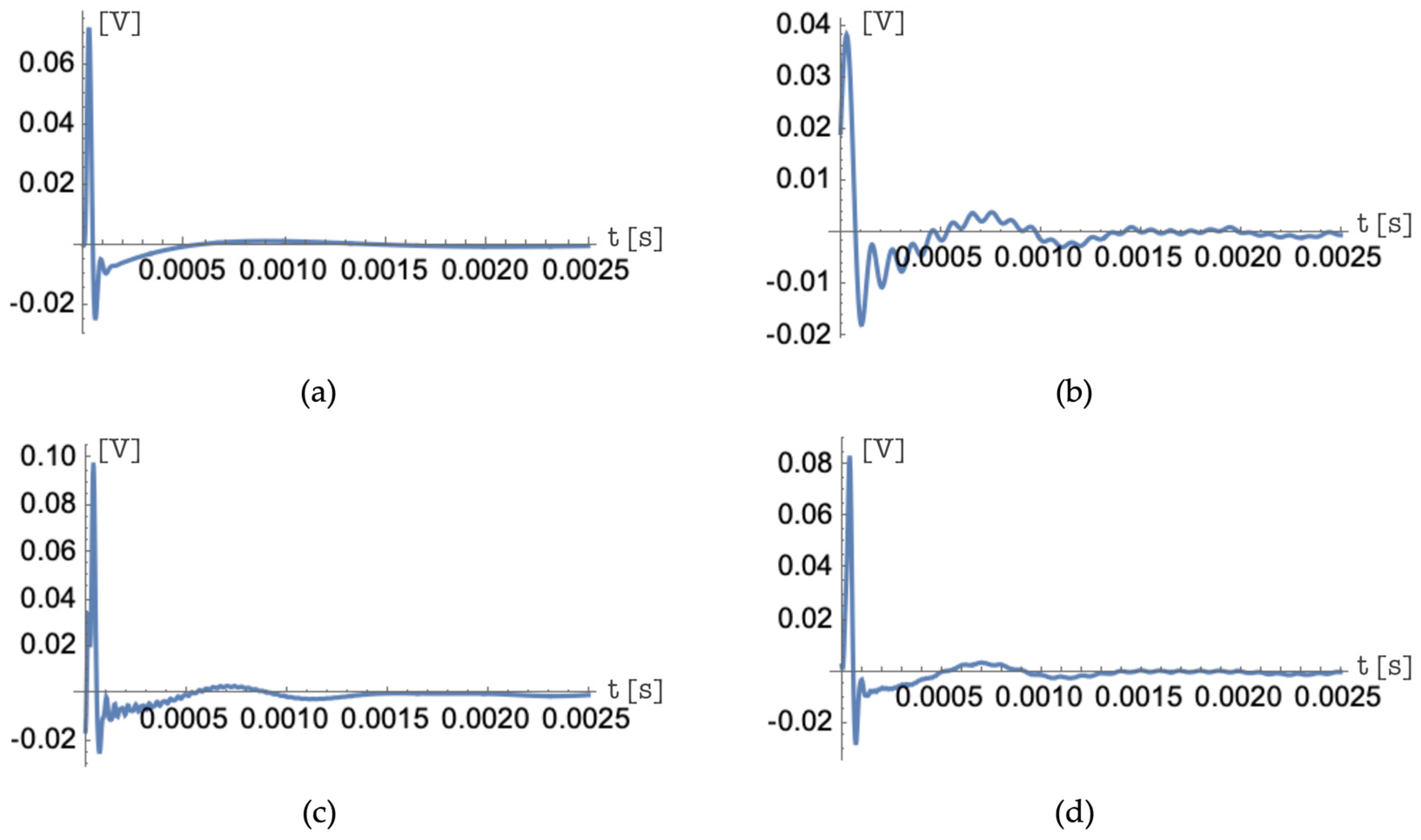
The corresponding result obtained in the time domain is very interesting. For ease of reading, in each of
Figure 11a,
Figure 12a and
Figure 13a are reported the reference trend of each of the three functions
,
and
considered, respectively, shown as compared with those obtained by the identification Procedures 1, 2, and 3, plotted in
Figure 11b–d,
Figure 12b–d and
Figure 13b–d, respectively.
The considerations can be made cumulatively with reference to the three figures considered. Identification Procedure 1, which involves a significant limitation in the bandwidth of the identified function and an abrupt jump in the amplitude response at , leads, in all cases considered, to an increase in the duration of the initial peak and to a strongly oscillating trend in the response over time.
In the case of identification Procedure 2, it is not so much the band limitation that makes its effects on the time course, but the irregularities, which are observed in the amplitude response, are reflected in irregularities in the time course and, again, in oscillations in the response.
Only identification Procedure 3, in all the cases considered, provides an adequate ability to regain the time course of the functions considered, and thus, a correct identification of the Hammerstein model in both the time and frequency domains. It can be added that the trends of functions
and
lead to essentially equivalent considerations to those of the three functions
,
and
shown in
Figure 11,
Figure 12 and
Figure 13, respectively.
4. Discussion
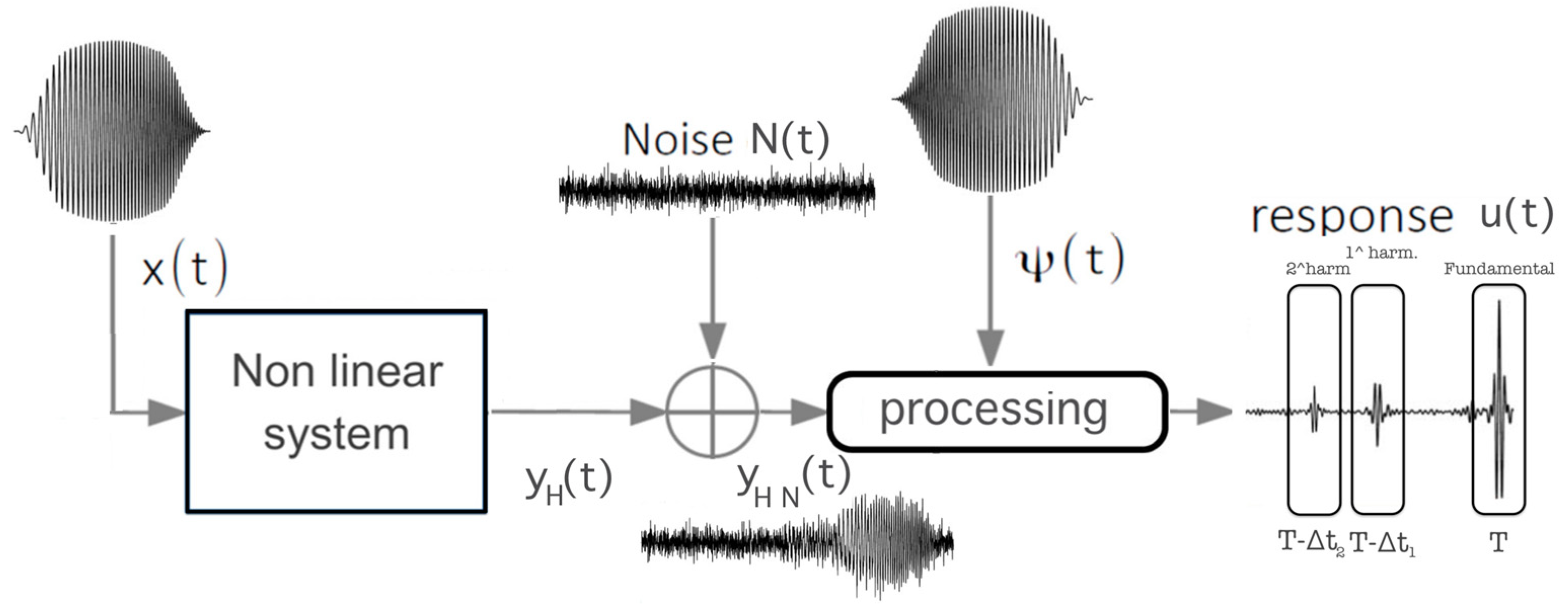
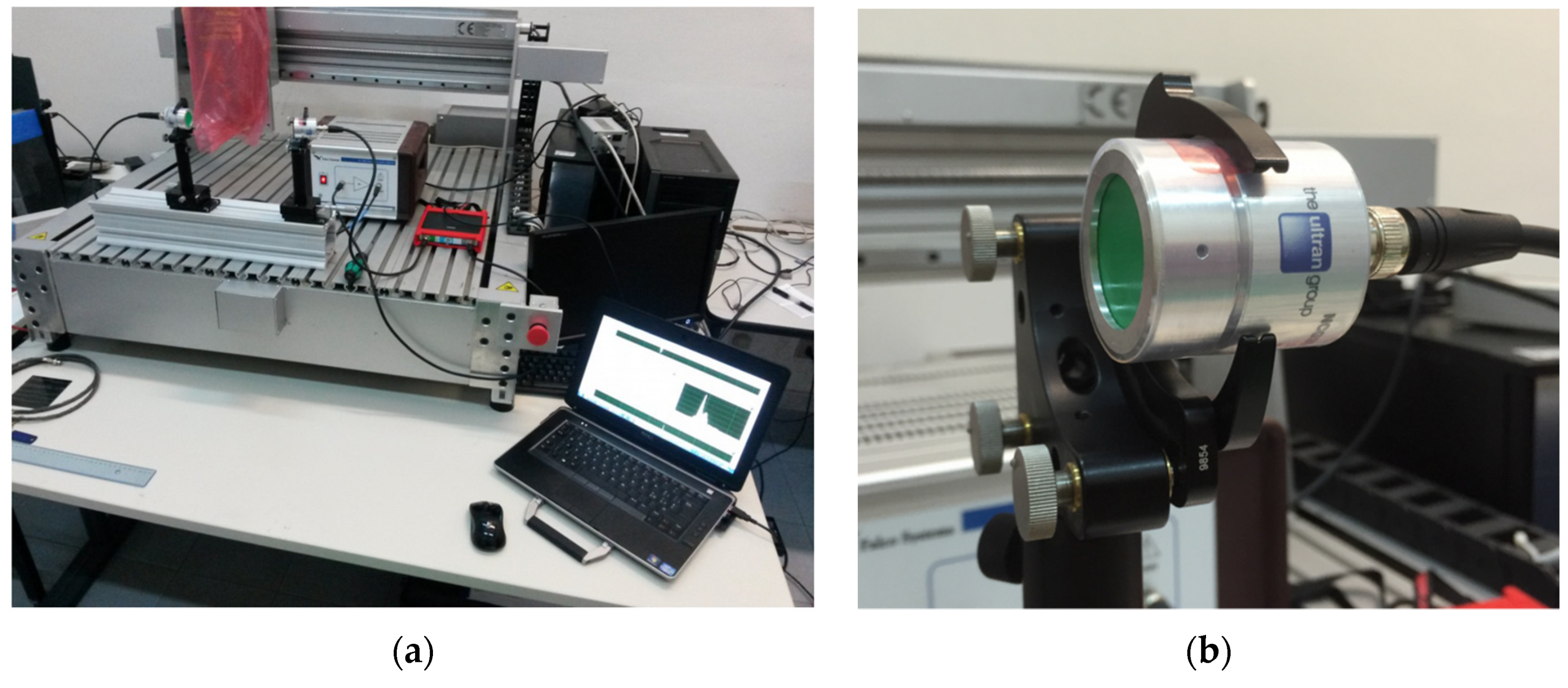
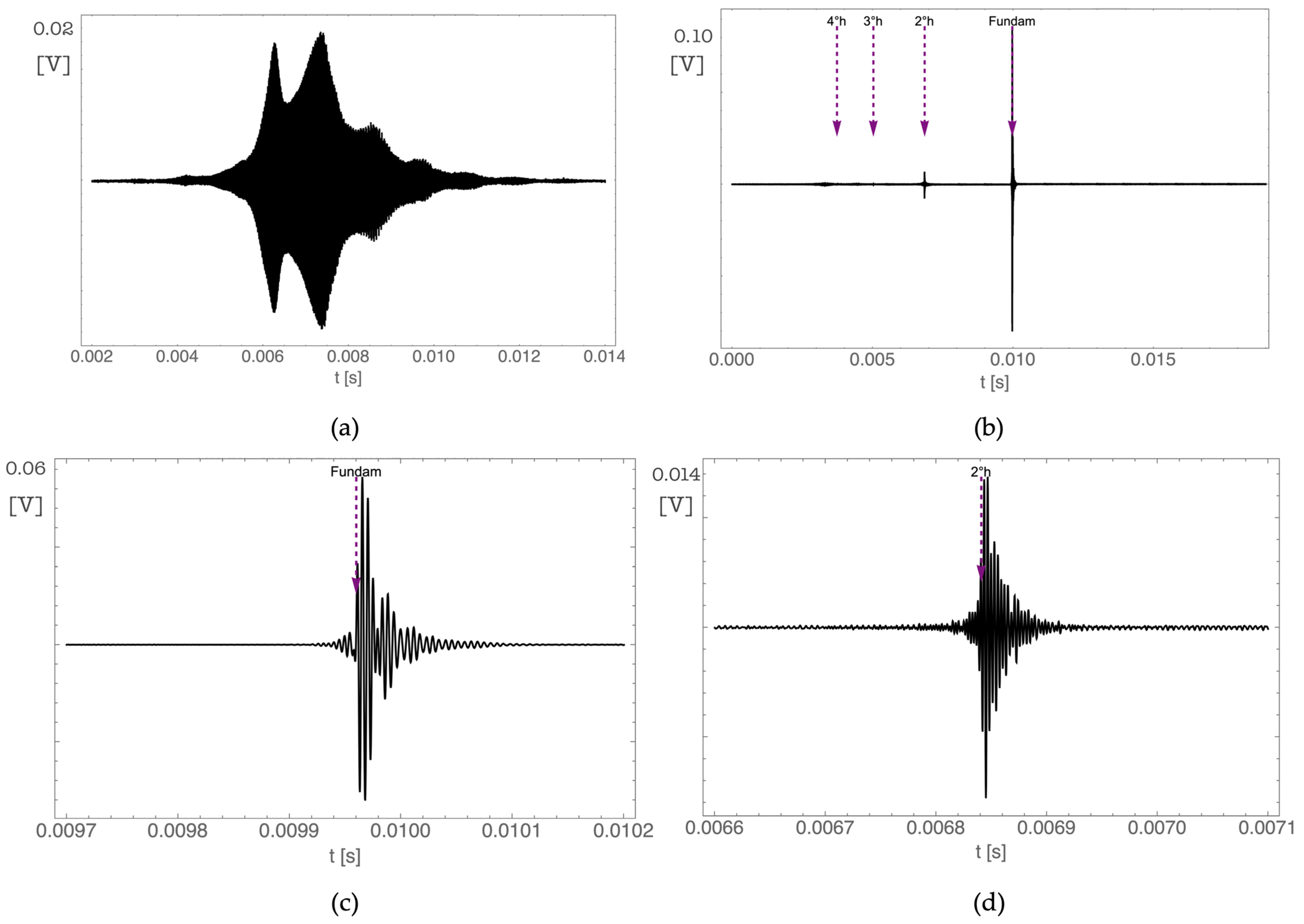
The present work addressed the problem of the quality of the estimation of kernels characterizing the different branches of a Hammerstein model of a nonlinear system, in the case in which such a model is identified through the PuC technique. First, the work was concerned with verifying the real existence of the problem and, in particular, the presence of spurious oscillations at transitions in the time response of the system. To do this, and to verify that this problem is present in real physical devices, an attempt was made to verify the existence of the problem through a laboratory experiment. The experiment involved an ultrasonic system with probes designed to operate in air. An analysis of the results obtained by modeling the real physical system through a Hammerstein model showed that the impulsive responses of the various filters entering into the model’s characterization do indeed exhibit precursors, in the form of oscillations that anticipate the theoretically calculated instant of attack. It was hypothesized that the presence of such oscillations was associated with the Gibbs phenomenon, which motivated us to analyze possible limitations of the frequency band covered by the characterization of the different impulse responses of the filters that constitute the kernels of the Hammerstein model. This analysis of the frequency bands was carried out by rewriting the PuC procedure in the frequency domain and observing how the final result, i.e., the functions, were obtained by linearly combining the functions, which, in turn, were obtained through the convolution between the response of the nonlinear system to an exponential swept-sine signal and the filter matched to that signal.
Because of the way the matched filter was defined in the present case (optimized for additive white Gaussian noise), the convolution with the matched filter was equivalent to the correlation function of the response of the nonlinear system with the signal at its input.
If the signal at the input and the matched filter both had infinite bands, the correlation would extend over the entire frequency range; since the bands are limited, the frequency band in which the correlating signals overlap, i.e., the band in which the procedure allows the definition of the
functions, depends on the frequency bands in which the input signal and the matched filter are defined. In addition, it can be observed that the combination of
functions occurs through matrices whose upper triangular structure means that the
functions of low
index, which are in most cases energetically more significant, are obtained by combining more
functions than for the
functions of high
index. This implies that if
functions are defined in frequency bands that are inconsistent with each other, the
functions that will be most affected will be those that are energetically more significant.
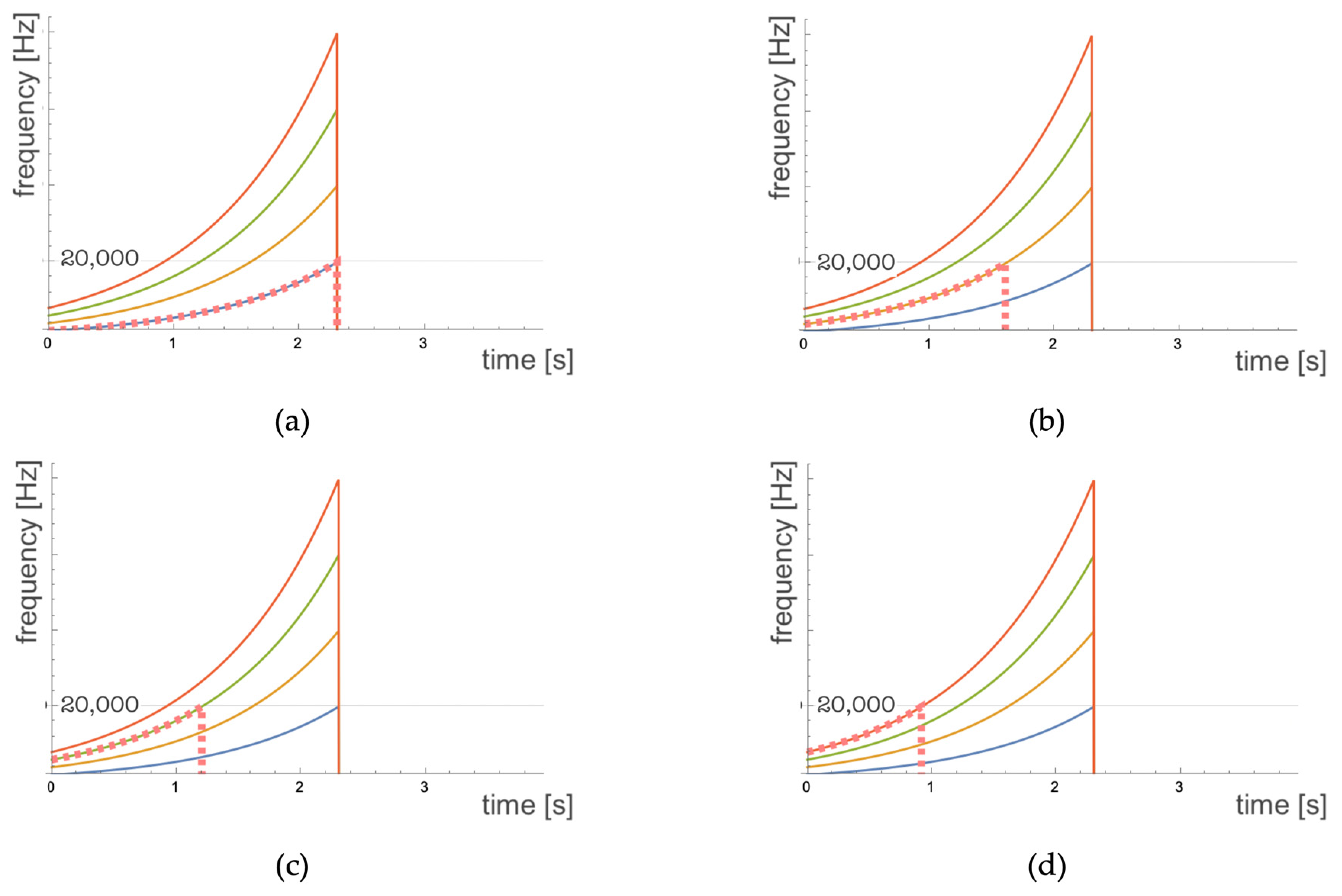
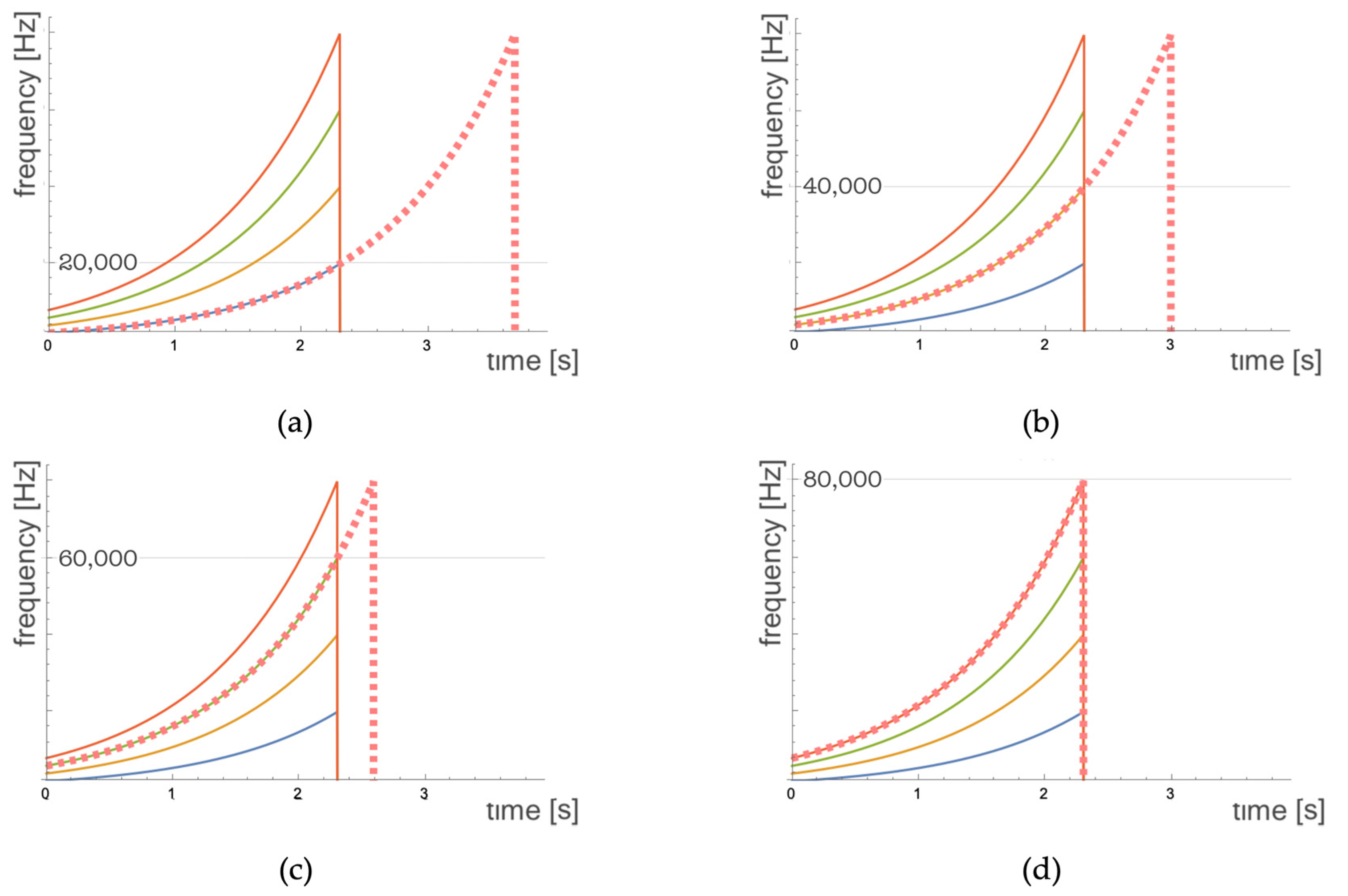
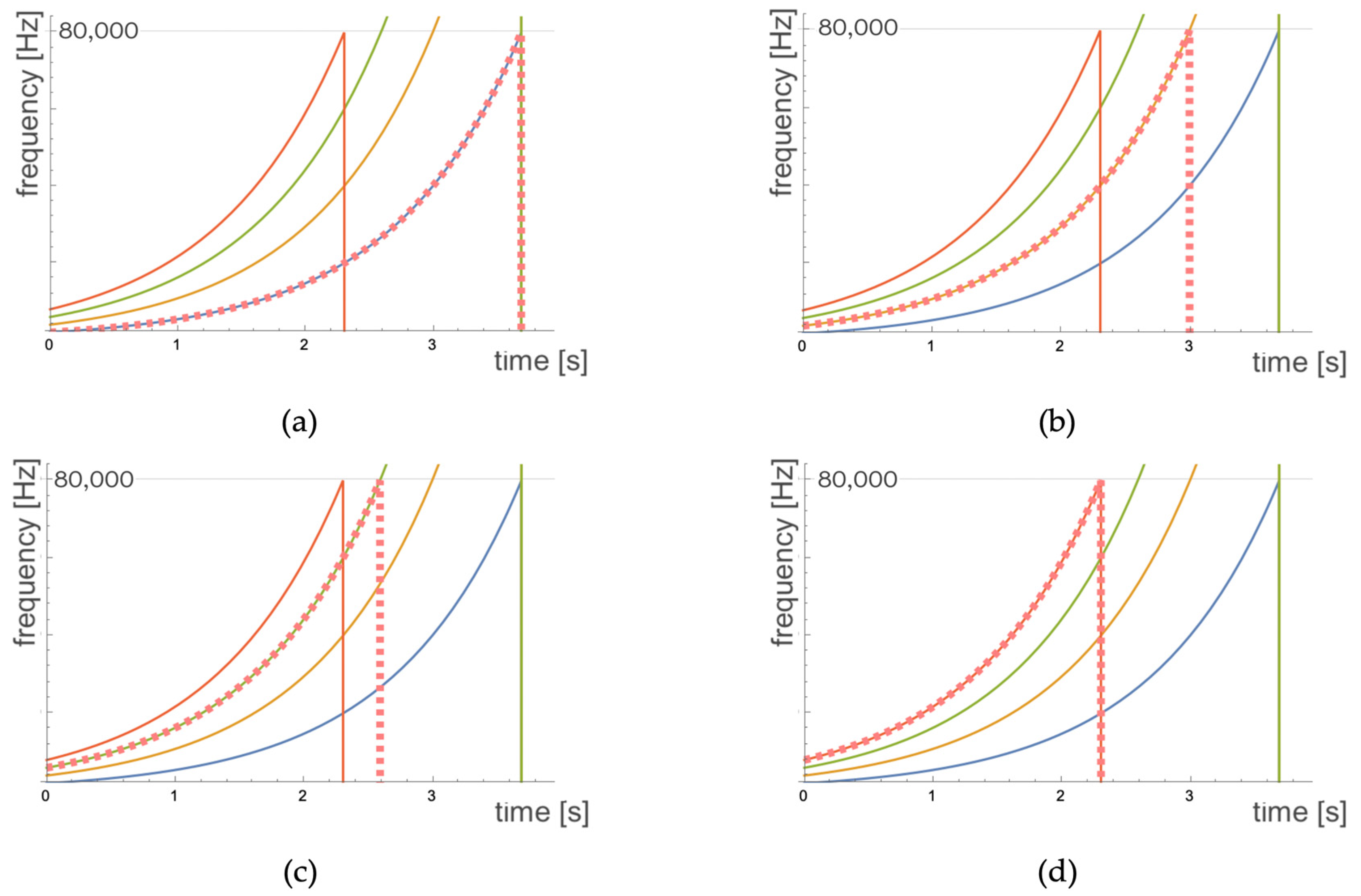
Figure 6,
Figure 7 and
Figure 8 graphically represent the effect of frequency band limitations in the estimation of
functions. An analysis of the schematizations shown in these figures shows that in order for the
functions to ensure that the frequency band covered by the correlation, for all
indices, is the necessary one, both the exponential swept-sine signal as input and the matched filter must be defined in the frequency band from
to
.
To verify that the analysis performed was correct, a specific experiment was designed. The experiment had to be able to compare the result obtained through PuC identification with the ideal result. To have such an ideal reference available, we chose to adopt a simulated experiment in which the nonlinear system was realized according to the Hammerstein model scheme. In this way, what kernel trends are expected to be estimated by the PuC identification system were known. The Results section describes the nonlinear system simulator and the results of the identification by means of the PuC procedure. The simulator was realized using a fifth-order Hammerstein system, placing on the five branches in parallel, linear filters whose parameters are given in
Table 1, and whose amplitude and impulse responses are shown in
Figure 9.
Figure 10 shows, in terms of the amplitude responses of the five filters, the comparison between the ideal trends and the trends obtained by adopting the PuC procedure with three different choices of the frequency bands of the input signal and the matched filter. The reported result highlights the correctness of the assumptions made about the necessary bands. Only in the case in which both the exponential swept-sine signal at the input and the corresponding matched filter have frequency band ranging from
to
, are all five amplitude response trends obtained by PuC identification reasonable estimates of the ideal trends across the whole useful band.
Figure 11,
Figure 12 and
Figure 13 show similar results in the time domain, comparing, in each figure, the ideal impulse responses and those obtained with the three choices of the frequency bands of the input signal and of the corresponding impulse response of the matched filter.
Figure 11,
Figure 12 and
Figure 13 show the comparison of the results over time for the impulse responses
,
and
, respectively. The time-domain analysis also confirms all the assumptions made. The best approximation always occurs when the chosen frequency bands range from
to
and, in the case of different choices for frequency bands, the trends of the lowest index
functions are most strongly affected by this frequency limitation.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}