
Evaluation of the Effects of Passive Lower-Limb Exoskeletons on Muscle Activities According to Working Heights

 ,
,
Abstract
:1. Introduction
2. Methods
2.1. Participants
2.2. Lower-Limb Exoskeletons
- The CEX (Hyundai Motor Group, Seoul, Republic of Korea) can be adjusted at three angles (55, 70, and 85°) by pressing the adjustment button step by step, and the length of the frame can be adjusted appropriately according to the user and working environment (Figure 1, left). It consists of thigh supporters and calf supporters. Additional bars, the knee angle adjustment parts, are configured to support the body weight and balance from the floor. It weighs about 1.8 kg and can be adjusted to suit the user’s body, using buckles and Velcro on the thighs and calves. The CEX can support up to 200 kg body weight.
- The Chairless Chair 2.0 (CC) (Noonee, Wendlingen, Germany) can also be adjusted to the angles of the body frame using buttons located in the upper part (thigh) of the frame. While the CEX can accommodate three angles, the Chairless Chair can adjust the angle (100 to 156°) by pressing the adjustment button to release it at the desired angle. However, it cannot be adjusted at angles lower than 100° or less (Figure 1, right). It consists of thigh supports and frames attached to shoes to support the floor. The 3.0 kg Chairless Chair is designed to withstand up to 120 kg.
2.3. Experimental Procedures
2.4. Statistical Analysis
3. Results
3.1. Muscle Activity (EMG)
3.1.1. Effect of Passive Exoskeleton on EMG
3.1.2. Effect of Working Height on EMG
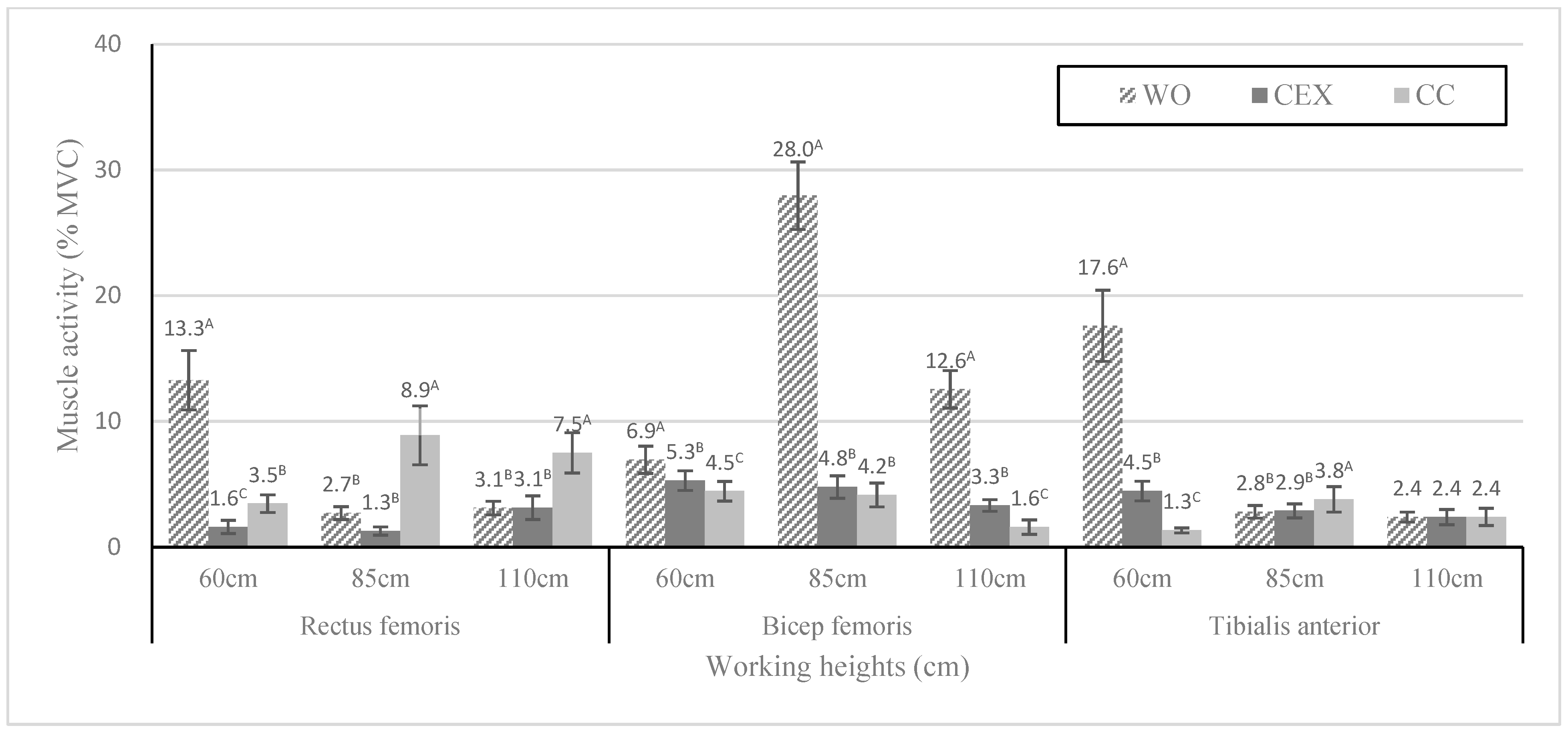
3.1.3. Interaction Effects between Working Height and Passive Exoskeleton on EMG
3.2. Subjective Discomfort Rating
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gell, N.; Werner, R.A.; Hartigan, A.; Wiggermann, N.; Keyserling, W.M. Risk factors for lower extremity fatigue among assembly plant workers. Am. J. Ind. Med. 2011, 54, 216–223. [Google Scholar] [CrossRef] [PubMed]
- Waters, T.R.; Dick, R.B. Evidence of health risks associated with prolonged standing at work and intervention effectiveness. Rehabil. Nurs. 2015, 40, 148–165. [Google Scholar] [CrossRef]
- Yazuli, Z.A.; Karuppiah, K.; Kumar, E.; Md Tamrin, S.B.; Sambasivam, S. Discomfort, fatigue and work-related musculoskeletal disorders associated with prolonged standing among Malaysian manufacturing workers: A mini review. Songklanakarin J. Sci. Technol. 2019, 41, 271–275. [Google Scholar]
- International Labour Office; International Ergonomics Association. Ergonomic Checkpoints, 2nd ed.; International Labour Office: Geneva, Switzerland, 2010. [Google Scholar]
- DeLooze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2015, 59, 671–681. [Google Scholar] [CrossRef]
- Steinhilber, B.; Seibt, R.; Rieger, M.A.; Luger, T. Postural control when using an industrial lower limb exoskeleton: Impact of reaching for a working tool and external perturbation. Hum. Factors 2020, 64, 635–648. [Google Scholar] [CrossRef]
- Kim, S.; Moore, A.; Srinivasan, D.; Akanmu, A.; Barr, A.; Harris-Adamson, C.; Rempel, D.M.; Nussbaum, M.A. Potential of exoskeleton technologies to enhance safety, health, and performance in construction: Industry perspectives and future research directions. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 185–191. [Google Scholar] [CrossRef]
- Upasani, S.; Franco, R.; Niewolny, K.; Srinivasan, D. The potential for exoskeletons to improve health and safety in agriculture—Perspectives from service providers. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 222–229. [Google Scholar] [CrossRef]
- P’erez Vidal, A.F.; Rumbo Morales, J.Y.; Ortiz Torres, G.; Sorcia V’azquez, F.D.J.; Cruz Rojas, A.; Brizuela Mendoza, J.A.; Rodríguez Cerda, J.C. Soft exoskeletons: Development, requirements, and challenges of the last decade. Actuators 2021, 10, 166. [Google Scholar] [CrossRef]
- Pillai, M.V.; Engelhoven, L.V.; Kazerooni, H. Evaluation of a lower leg support exoskeleton on floor and below him height panel work. Hum. Factors 2020, 62, 489–500. [Google Scholar] [CrossRef]
- Hasegawa, Y.; Muramatsu, M. Wearable lower-limb assistive device for physical load reduction of caregiver on transferring support. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Wollongong, Australia, 9–12 July 2013; pp. 1027–1032. [Google Scholar]
- Luger, T.; Cobb, T.J.; Seibt, R.; Rieger, M.A.; Steinhiber, B. Subjective evaluation of a passive lower-limb industrial exoskeleton used during simulated assembly. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 175–184. [Google Scholar] [CrossRef]
- Huysamen, K.; de Looze, M.; Bosch, T.; Ortiz, J.; Toxiri, S.; O’Sullivan, L.W. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks. Appl. Ergon. 2018, 68, 125–131. [Google Scholar] [CrossRef]
- Alabdulkarim, S.; Nussbaum, M.A. Influences of different exoskeleton designs and tool mass on physical demands and performance in a simulated overhead drilling task. Appl. Ergon. 2019, 74, 55–66. [Google Scholar] [CrossRef]
- Gillette, J.C.; Stephenson, M.L. EMG analysis of an upper body exoskeleton during automotive assembly. In Proceedings of the 42nd Annual Meeting of the American Society of Biomechanics, Rochester, NY, USA, 8–11 August 2018; pp. 308–309. [Google Scholar]
- Barrett, A.L.; Fathallah, F.A. Evaluation of four weight transfer devices for reducing loads on the lower back during agricultural stoop labor. In Proceedings of the American Society of Agricultural Engineers, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar]
- Ulrey, B.L.; Fathallah, F.A. Effect of a personal weight transfer device on muscle activities and joint flexions in the stooped posture. J. Electromyogr. Kinesiol. 2013, 23, 195–205. [Google Scholar] [CrossRef]
- Rashedi, E.; Kim, S.; Nussbaum, M.A.; Agnew, M.J. Ergonomic evaluation of a wearable assistive device for overhead work. Ergonomics 2014, 57, 1684–1874. [Google Scholar] [CrossRef] [PubMed]
- Van Engelhoven, L.; Poon, N.; Kazerooni, H.; Barr, A.; Rempel, D.; Harris-Adamson, C. Evaluation of an Adjustable Support Shoulder Exoskeleton on Static and Dynamic Overhead Tasks. In Proceedings of the Human Factors and Ergonomics Society 2018 Annual Meeting, Philadelphia, PA, USA, 1–5 October 2018; Volume 62, pp. 804–808. [Google Scholar]
- Hermens, H.J.; Freriks, B.; Disselhorst-Klug, C.; Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. J. Electromyogr. Kinesiol. 2000, 10, 361–374. [Google Scholar] [CrossRef] [PubMed]
- Size Korea. 2021. Available online: www.sizekorea.or.kr (accessed on 1 April 2023).
- Borg, G.A. Psychophysical bases of perceived exertion. Med. Sci. Sports Exerc. 1982, 14, 377–381. [Google Scholar] [CrossRef]
- Yan, Z.; Han, B.; Du, Z.; Huang, T.; Bai, O.; Peng, A. Development and testing of a wearable passive lower-limb support exoskeleton to support industrial workers. Biocybern. Biomed. Eng. 2021, 41, 221–238. [Google Scholar] [CrossRef]
- Bosch, T.; van Eck, J.; Knitel, K.; de Looze, M. The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 2016, 54, 212–217. [Google Scholar] [CrossRef] [PubMed]
- Kong, Y.K.; Park, C.W.; Cho, M.U.; Kim, S.Y.; Kim, M.J.; Hyun, D.J.; Bae, K.; Choi, J.K.; Ko, S.M.; Choi, K.H. Guidelines for working heights of the lower-limb exoskeleton (CEX) based on ergonomic evaluations. Int. J. Environ. Res. Public. Health 2021, 18, 5199. [Google Scholar] [CrossRef] [PubMed]
- Williams, V.J.; Nagai, T.; Sell, T.C.; Abt, J.P.; Rowe, R.S.; McGrail, M.A.; Lephart, S.M. Prediction of dynamic postural stability during single-leg jump landings by ankle and knee flexibility and strength. J. Sport Rehabil. 2016, 25, 266–272. [Google Scholar] [CrossRef]
- Almeida, G.L.; Carvalho, R.L.; Talis, V.L. Postural strategy to keep balance on the seesaw. Gait Posture 2006, 23, 17–21. [Google Scholar] [CrossRef] [PubMed]
- Maeda, N.; Urabe, Y.; Fujii, E.; Moriyama, N.; Iwata, S.; Sasadai, J. The effect of different stretching techniques on ankle joint range of motion and dynamic postural stability after landing. J. Sports Med. Phys. Fit. 2016, 56, 692–698. [Google Scholar]
- Lee, S.; Crea, S.; Malcolm, P.; Galiana, I.; Asbeck, A.; Walsh, C. Controlling negative and positive power at the ankle with a soft exosuit. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3509–3515. [Google Scholar]
- He, H.; Kiguchi, K.; Horikawa, E. A study on lower-limb muscle activities during daily lower-limb motions. Int. J. Bioelectromagn. 2007, 9, 79–84. [Google Scholar]
- Luger, T.; Seibt, R.; Cobb, T.J.; Rieger, M.A.; Steinhilber, B. Influence of a passive lower-limb exoskeleton during simulated industrial work tasks on physical load, upper body posture, postural control and discomfort. Appl. Ergon. 2019, 80, 152–160. [Google Scholar] [CrossRef] [PubMed]
- Darvishi, E.; Maleki, A.; Giahi, O.; Akbarzadeh, A. Subjective mental workload and its correlation with musculoskeletal disorders in bank staff. J. Manip. Physiol. Ther. 2016, 39, 420–426. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Muscle | Intervention [Unit: %MVC] | p-Value | ||
|---|---|---|---|---|
| WO | WCC | WCEX | ||
| Upper trapezius (UT) | 9.2 (1.8) | 9.3 (1.3) | 10.1 (1.4) | 0.854 |
| Middle deltoid (MD) | 3.0 (0.2) | 3.4 (0.4) | 3.2 (0.3) | 0.622 |
| Triceps brachii (TB) | 3.8 (0.6) | 4.6 (1.2) | 4.1 (1.1) | 0.860 |
| Biceps brachii (BB) | 9.1 (1.0) | 10.1 (1.2) | 10.3 (1.2) | 0.669 |
| Erector spinae (ES) | 12.8 (1.1) | 11.6 (1.1) | 14.1 (1.1) | 0.226 |
| Rectus femoris (RF) | 6.4 (1.3) A | 6.6 (1.4) A | 2.0 (0.5) B | 0.002 * |
| Biceps femoris (BF) | 15.8 (1.9) A | 3.4 (0.7) B | 4.5 (0.6) B | <0.001 * |
| Tibialis anterior (TA) | 7.6 (1.6) A | 2.5 (0.6) B | 3.2 (0.5) B | <0.001 * |
| Muscle | Working Height [Unit: %MVC] | p-Value | ||
|---|---|---|---|---|
| 60 cm | 85 cm | 110 cm | ||
| Upper trapezius (UT) | 11.8 (1.9) A | 6.7 (1.1) B | 10.1 (1.4) AB | 0.009 * |
| Middle deltoid (MD) | 3.0 (0.3) | 3.3 (0.3) | 3.3 (0.4) | 0.710 |
| Triceps brachii (TB) | 3.9 (1.2) | 4.4 (1.0) | 4.3 (0.8) | 0.930 |
| Biceps brachii (BB) | 7.4 (0.9) B | 11.5 (1.2) A | 10.6 (1.2) AB | 0.016 * |
| Erector spinae (ES) | 11.6 (1.2) | 14.0 (1.3) | 12.9 (0.8) | 0.212 |
| Rectus femoris (RF) | 6.1 (1.4) | 4.3 (1.2) | 4.6 (1.0) | 0.390 |
| Biceps femoris (BF) | 5.6 (0.7) B | 12.3 (2.0) A | 5.8 (1.0) B | <0.001 * |
| Tibialis anterior (TA) | 7.8 (1.6) A | 3.2 (0.6) B | 2.4 (0.5) B | <0.001 * |
| Body Part | Interventions | Working Height | ||||||
|---|---|---|---|---|---|---|---|---|
| WO | WCC | WCEX | p-Value | 60 cm | 85 cm | 110 cm | p-Value | |
| Neck | 2.1 | 1.6 | 1.5 | 0.677 | 1.7 | 1.8 | 1.7 | 0.053 |
| Shoulder | 2.1 | 1.7 | 1.6 | 0.541 | 1.7 | 1.8 | 1.9 | 0.152 |
| Chest | 1.5 | 1.5 | 1.2 | 0.265 | 1.4 | 1.4 | 1.4 | 0.057 |
| Arm | 2.3 | 1.8 | 1.8 | 0.476 | 1.8 | 1.9 | 2.1 | 0.189 |
| Back | 2.7 | 2.3 | 2.3 | 0.327 | 2.5 | 2.6 | 2.2 | 0.258 |
| Leg | 2.3 | 2.8 | 2.5 | 0.474 | 3.0 | 2.4 | 2.3 | 0.823 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shim, H.-H.; Choi, K.-H.; Keum, H.; Son, S.; Kim, J.H.; Seo, M.-T.; Kim, S.-Y.; Park, D.; Kong, Y.-K. Evaluation of the Effects of Passive Lower-Limb Exoskeletons on Muscle Activities According to Working Heights. Appl. Sci. 2023, 13, 11754. https://doi.org/10.3390/app132111754
Shim H-H, Choi K-H, Keum H, Son S, Kim JH, Seo M-T, Kim S-Y, Park D, Kong Y-K. Evaluation of the Effects of Passive Lower-Limb Exoskeletons on Muscle Activities According to Working Heights. Applied Sciences. 2023; 13(21):11754. https://doi.org/10.3390/app132111754
Chicago/Turabian StyleShim, Hyun-Ho, Kyeong-Hee Choi, Hyunji Keum, Seungjae Son, Jeong Ho Kim, Min-Tae Seo, Seoung-Yeon Kim, Donghyun Park, and Yong-Ku Kong. 2023. "Evaluation of the Effects of Passive Lower-Limb Exoskeletons on Muscle Activities According to Working Heights" Applied Sciences 13, no. 21: 11754. https://doi.org/10.3390/app132111754
APA StyleShim, H. -H., Choi, K. -H., Keum, H., Son, S., Kim, J. H., Seo, M. -T., Kim, S. -Y., Park, D., & Kong, Y. -K. (2023). Evaluation of the Effects of Passive Lower-Limb Exoskeletons on Muscle Activities According to Working Heights. Applied Sciences, 13(21), 11754. https://doi.org/10.3390/app132111754