
A Review of Innovative Electromagnetic Technologies for a Totally Artificial Heart




Abstract
:1. Introduction
- Adequate cardiac output generation;
- Adoption of biocompatible and durable materials (the complete system must last more than 5 years);
- Limited heat generation and power consumption;
- Presence of a back-up supply unit whether the main one was not available;
- Balance the systemic and pulmonary circulations despite a wide variety of hemodynamic perturbations;
- Avoid bulky and complex equipment (external driver, percutaneous drivelines, or pneumatic hose) that can limit patient survival and quality of life.
2. Main TAH Projects
- The Li-ion battery (discharge time ≈ 20 min);
- The controller that monitors all the implant components and transmits device performance data using radio frequency telemetry;
- The TET coil that receives high-frequency power that is transmitted across the skin from the external TET coil to recharge the internal battery;
- The electromechanical converter that includes a high-efficiency, high-speed centrifugal pump driven by an electric motor; it adjusts the speed according to the different resistances requested to emulate the systolic and diastolic phases;
- A switching valve used to alternate the direction of the hydraulic flow between the left and right pumping chambers.
3. TAH Electromechanical Components
- The heart unit (A), consisting of the integrated actuator and pumps or membranes installed in suitable chambers, possibly provided with valves;
- An external battery pack (B) to supply the external user interface (D), which collects information about the performance of the pumps and of the TET system and tunes the system parameters. A portable lithium-ion battery-type (Li-ion) can power the TAH from 4 to 8 h;

- The TET system, composed of the external transmitting coil (F), which in practice is the primary winding of a transcutaneous high-frequency transformer, whose secondary is the implanted receiving coil (G). The electric power collected by G via the inductive coupling enables recharging of the implanted battery (C) and/or supplies the control circuit of the heart unit (F). A bidirectional data exchange is also present, to monitor and adjust the operating condition of the implanted devices;
- The compliance chamber (E), where blood accumulates to avoid overpressures in the ventricles and to facilitate pumping action;
- The microprocessor-based control unit (H), which regulates the operation mode of the heart unit and checks its status. Usually, the closed-loop architecture ensures adequate control robustness, tuning the control strategy according to the parameters provided by the communication cables (from the TET or heart unit sensors).
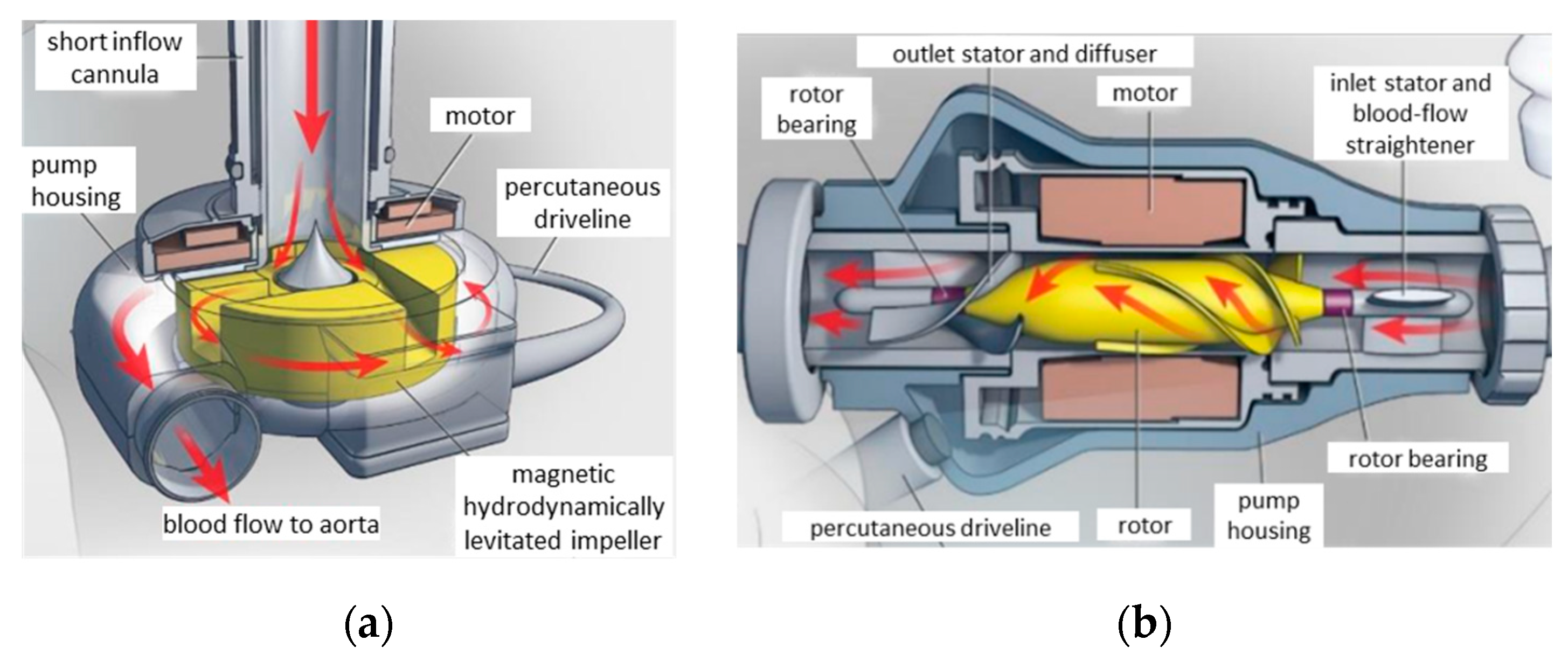
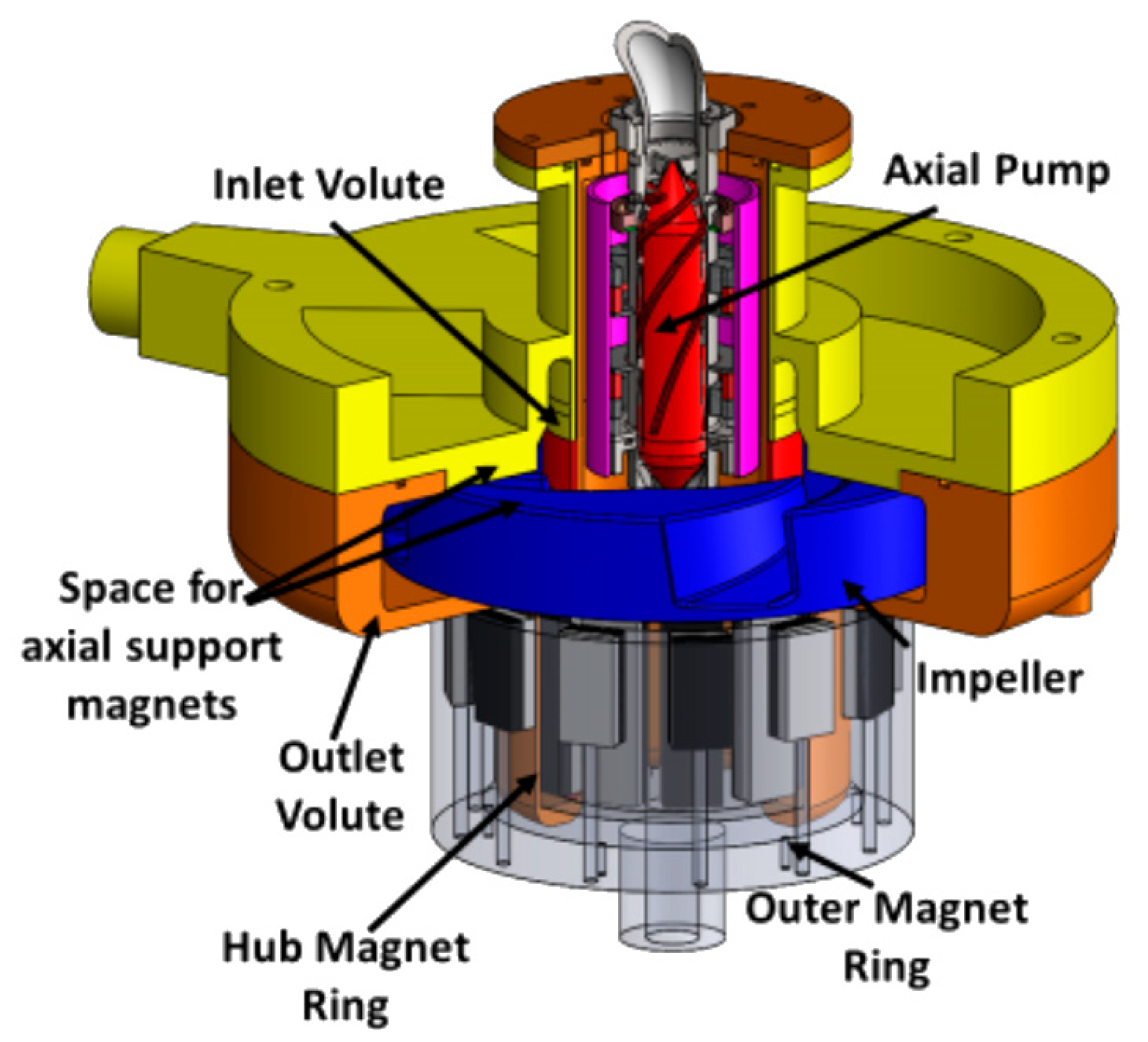
3.1. Motor Pumps and Bearings
- Linear dependence of the output flow on the motor current across the full range of the operating pump flow, enabling the pump operation to be monitored and controlled straightforwardly by means of the current value;
- The flat head curve (greater change in the flow rate for any given pressure gradient across the inlet and outlet of the pump) that enables the mimicking of the pulsatile flow variation between diastole and systole. Such a feature also provides a more accurate flow estimation from the pump speed and power;
- Easier implementation of magnetic bearing suspension, allowing a larger gap between the rotor and the stator and improving reliability (absence of lubrication and sealing) and efficiency (no friction losses).
3.2. Electrical Drive
3.3. Energy Transmission
4. Linear Electromagnetic Actuators
4.1. LOA Ratings
- Radius/active length: 32–40 mm/20–40 mm;
- Stroke length: 8–18 mm;
- Volume: 90–180 mm3;
- Peak force/force density (): 40–140 N/0.18–0.88 N/cm3;
- Average LV/RV force (systolic phase): 50–70 N/15–30 N;
- Maximum values for mass/losses: 1 kg/20 W.
4.2. PM-LOAs
4.3. Single-Mover MM-LOA
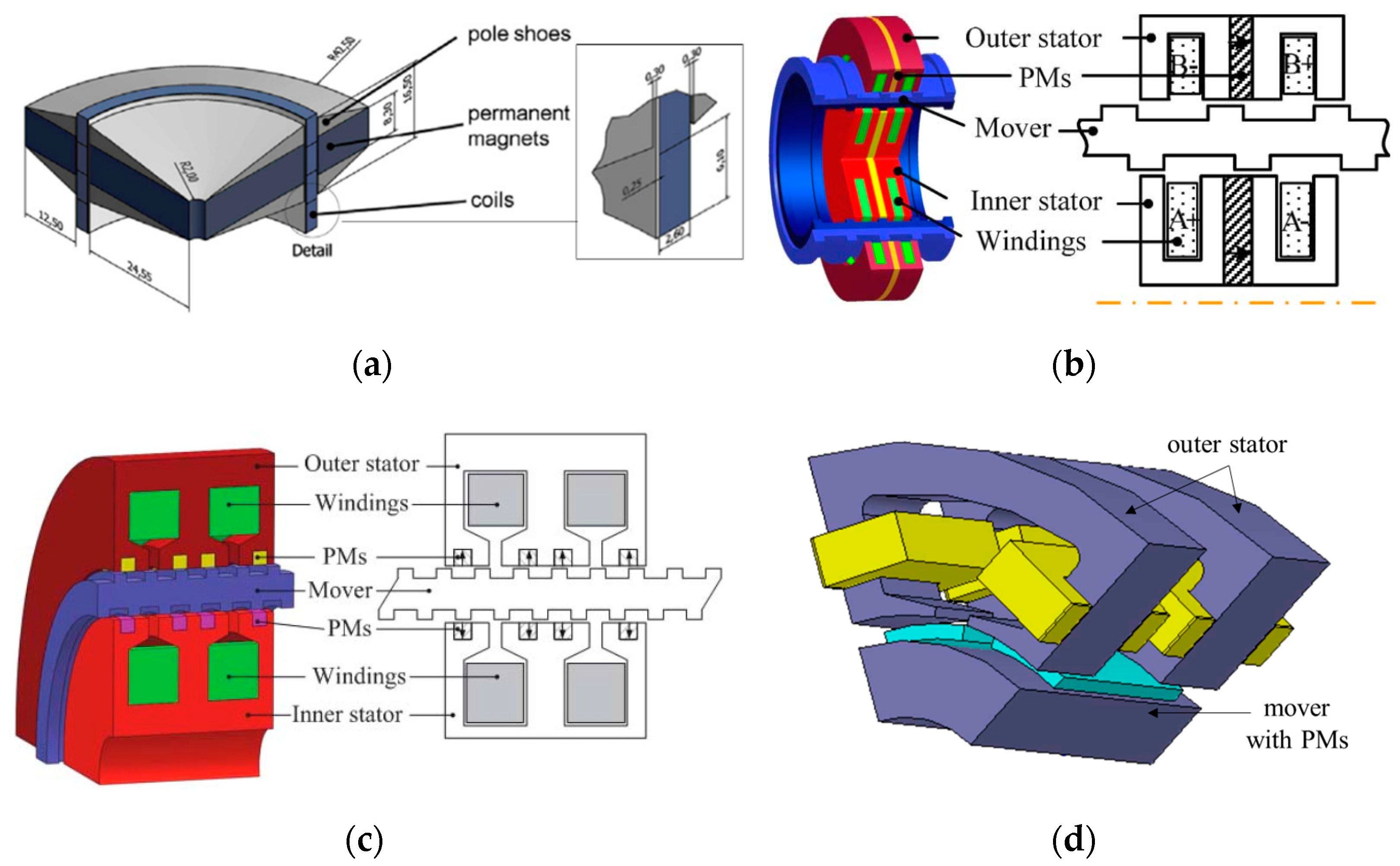
4.4. Dual-Mover MM-LOA
- Identical radially magnetized NdFeB-48 PMs in a repulsive configuration;
- Two distinct coils, enclosed in the outer high permeability stator core (CoFe alloy) and supplied by reverse currents to produce opposite thrusts in the nearby movers;
- The cross sections of the LV and RV coil cross sections are proportional to the related ampere-turn and , respectively, in turn proportioned with the corresponding rated thrust peak values 70 N/25 N;
- A fixed hollow core in the inner part to provide a return path for both the PM and winding fluxes.
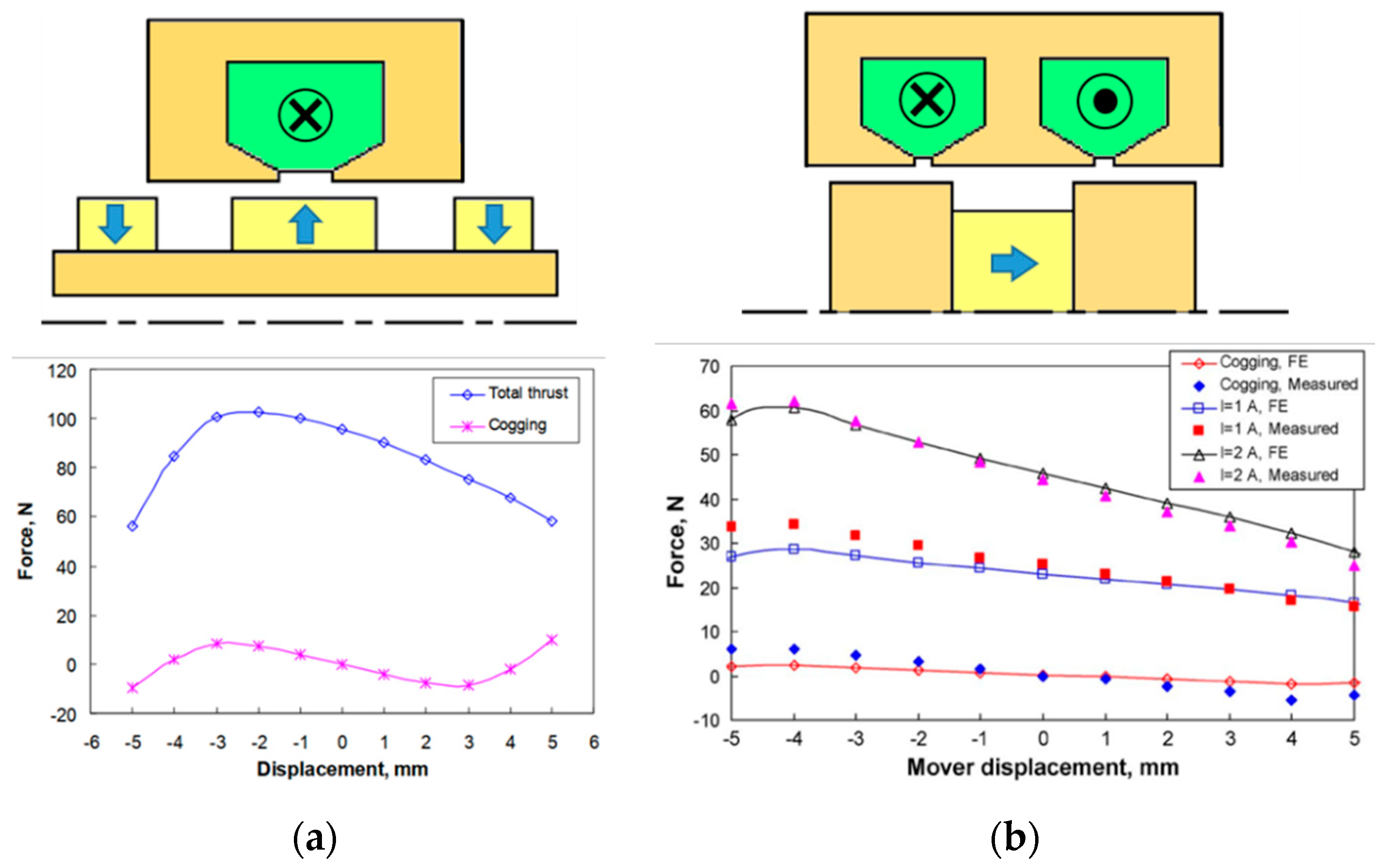
- The cogging force ( 0) benefits the forward stroke for both movers;
- Inverting the LV coil supply current near the end of the stroke (see point ) increases the thrust, which otherwise would even become negative, producing a braking effect;
- Due to the mutual linkage between the coils, the simultaneous current inversion in both coils slightly worsens the RV thrust;
- A residual cogging force opposes the backward motion in both movers (points and ), regardless of the current value.

5. Unconventional Electromagnetic Actuators
5.1. Contactless Power Transfer (CPT)
5.2. Linear Rotary Actuator (LiRA)
6. Overall Comparison
- The brushless motor (DC or AC) presents the highest maturity level because of its widespread ability in many low-rated applications, therefore ensuring high reliability and flexible control; however, in FD- and EM-TAH, the overall efficiency can suffer from the presence of gear or hydraulic converters, and in CF-TAH, the control can be more complicated in presence of magnetic bearings;
- The VR-LOA is the least suitable, as the manufacturing and control simplicity is by far offset by the limited thrust density and efficiency, the latter related to the required high current density;
- Among THE PM-LOAs, the MM one seems slightly better in terms of manufacturing simplicity, because no moving coils as well as complicated stator assembly are present;
- The CPT systems provide a promising performance and likely the most compact configuration as only the moving part is implanted; however, control issues can arise in the presence of misalignments or increased axial distancing between the external and the implanted parts;

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TAH Type | Actuator | Maturity | Compactness | Manufacturing Simplicity | Control Simplicity | Overall Efficiency |
|---|---|---|---|---|---|---|
| FD | Brushless motor | High | Low | Medium | High | Medium |
| EM | Brushless motor | High | Low | Medium | High | Medium |
| CF | Brushless motor | Medium | Medium | Medium | Low | High |
| EM | VR-LOA | Low | Low | High | High | Low |
| EM | MC-LOA | Medium | High | Medium | Medium | High |
| EM | MM-LOA | Medium | High | High | High | High |
| EM | PM VR-LOA | Low | Low | Low | Medium | Medium |
| EM | CPT | Low | High | Medium | Low | High |
| EM | MC-LiRA | Medium | High | Low | Medium | High |
| EM | Conventional LiRA | Low | Medium | Low | Low | High |
- LiRAs have no distinguished merits due to their still limited development and manufacturing complexity; however, the possibility to combine mover rotation and translation could lead to the simplest operational management for a TAH (pumping and blood flow control).
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, M.; Zhang, Y. Introduction to Artificial Hearts. In Artificial Hearts, 2nd ed.; Yang, M., Ed.; Springer Nature: Singapore, 2020; pp. 1–19. [Google Scholar]
- Watt, T.M.F.; Pagani, F.D. Artificial mechanical hearts and ventricular assist devices. In Emerging Technologies for Heart Diseases, 2nd ed.; Nussinovitch, U., Ed.; Academic Press: Cambridge, MA, USA, 2020; Volume 1, pp. 25–40. [Google Scholar]
- Phillips, K.G.; Ranganath, N.K.; Moazami, N. Status and Availability of a Total Artificial Heart. In Mechanical Support for Heart Failure; Karimov, J.H., Fukamachi, K., Starling, R.C., Eds.; Springer Nature: Cham, Switzerland, 2020; pp. 191–220. [Google Scholar]
- Jefferson, H.L.; Kent, W.D.T.; MacQueen, K.T.; Miller, R.J.H.; Holloway, D.D.; Hassanabad, A.F. Left ventricular assist devices: A comprehensive review of major clinical trials, devices, and future directions. J. Card. Surg. 2021, 36, 1480–1491. [Google Scholar] [CrossRef] [PubMed]
- Andrade, A.; Nicolosi, D.; Lucchi, J.; Biscegli, J.; Arruda, A.C.; Ohashi, Y.; Mueller, J.; Tayama, E.; Glueck, J.; Nosé, Y. Auxiliary total artificial heart: A compact electromechanical artificial heart working simultaneously with the natural heart. Artif. Organs 1999, 23, 876–880. [Google Scholar] [CrossRef] [PubMed]
- Andrade, A.; Fonseca, J.; Legendre, D.; Nicolosi, D.; Biscegli, J.; Pinotti, M.; Ohashi, Y.; Nosé, Y. Improvement on the Auxiliary Total Artificial Heart (ATAH) Left Chamber Design. Artif. Organs 2003, 27, 452–456. [Google Scholar] [CrossRef] [PubMed]
- Cohn, W.E.; Timms, D.L.; Frazier, O.H. Total artificial hearts: Past, present, and future. Nat. Rev. Cardiol. 2015, 12, 609–617. [Google Scholar] [CrossRef]
- Cole, R.M.; Arabía, F.A. Total Artificial Heart Technology: Where Are We Now? Curr. Transpl. Rep. 2018, 5, 315–318. [Google Scholar] [CrossRef]
- Spiliopoulos, S.; Hergesell, V.; Wasler, A.; Dapunt, O. Current state of total artificial heart therapy and introduction of the most important total artificial heart systems. Biomed. Eng. /Biomed. Tech. 2019, 64, 247–250. [Google Scholar] [CrossRef]
- Alnajar, A.; Frazier, O.H. The State of Artificial Heart Therapy. Tex. Heart Inst. J. 2019, 46, 77–79. [Google Scholar] [CrossRef]
- Gerosa, G.; Scuri, S.; Iop, L.; Torregrossa, G. Present and future perspectives on total artificial hearts. Ann. Cardiothorac. Surg. 2014, 3, 595–602. [Google Scholar]
- Goerlich, C.E.; Frazier, O.H.; Cohn, W.E. Previous challenges and current progress–the use of total artificial hearts in patients with end-stage heart failure. Expert Rev. Cardiovasc. Ther. 2016, 14, 1095–1098. [Google Scholar] [CrossRef] [Green Version]
- Vis, A.; Arfaee, M.; Khambati, H.; Slaughter, M.S.; Gummert, J.F.; Overvelde, J.T.; Kluin, J. The ongoing quest for the first total artificial heart as destination therapy. Nat. Rev. Cardiol. 2022, 19, 813–828. [Google Scholar] [CrossRef]
- Slepian, M.J.; Alemu, Y.; Soares, J.S.; Smith, R.G.; Einav, S.; Bluestein, D. The Syncardia™ total artificial heart: In vivo, in vitro, and computational modeling studies. J. Biomech. 2013, 46, 266–275. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Essandoh, M.; Kumar, N. Total artificial heart system. Int. Anesthesiol. Clin. 2022, 60, 39–45. [Google Scholar] [CrossRef] [PubMed]
- Dowling, R.D.; Gray, L.A., Jr.; Etoch, S.W.; Laks, H.; Marelli, D.; Samuels, L.; Entwistle, J.; Couper, G.; Vlahakes, G.J.; Frazier, O.H. The AbioCor implantable replacement heart. Ann. Thorac. Surg. 2003, 75, 93–99. [Google Scholar] [CrossRef] [PubMed]
- Gray, L.A. Total Artificial Heart (AbioCorTM). In Treatment of Advanced Heart Disease, 1st ed.; Baughmann, K.L., Baumgartner, W.A., Eds.; CRC Press: Boca Raton, FL, USA, 2006; pp. 459–471. [Google Scholar]
- Mohacsia, P.; Leprince, P. The CARMAT total artificial heart. Eur. J. Cardio-Thorac. Surg. 2014, 46, 933–934. [Google Scholar] [CrossRef] [Green Version]
- Carmat. Available online: https://www.carmatsa.com/en/our_product/ (accessed on 9 December 2022).
- Lippi, G.; Sanchis-Gomar, F. Global epidemiology and future trends of heart failure. AME Med. J. 2020, 5, 1–6. [Google Scholar] [CrossRef]
- Ministero Della Salute. Available online: https://www.trapianti.salute.gov.it/trapianti/archivioDatiCnt.jsp?lingua=italiano&anno=2022 (accessed on 9 December 2022).
- Coyan, G.N.; Huckaby, L.V.; Diaz-Castrillon, C.E.; Miguelino, A.M.; Kilic, A. Trends and outcomes following total artificial heart as bridge to transplant from the UNOS database. J. Card. Surg. 2022, 37, 1215–1221. [Google Scholar] [CrossRef]
- Palazzolo, T.; Hirschhorn, M.; Garven, E.; Day, S.; Stevens, R.M.; Rossano, J.; Tchantchaleishvili, V.; Throckmorton, A.L. Technology landscape of pediatric mechanical circulatory support devices: A systematic review 2010–2021. Artif. Organs 2022, 46, 1475–1490. [Google Scholar] [CrossRef]
- Bticherl, E.S.; Hennig, E.; Baer, P.; Frank, J.; Lemm, W.; Zartnack, F. Status of the Artificial Heart Program in Berlin. World J. Surg. 1985, 9, 103–115. [Google Scholar] [CrossRef]
- Jeong, G.S.; Hwang, C.M.; Nam, K.W.; Ahn, C.B.; Kim, H.C.; Lee, J.J.; Choi, J.; Son, H.S.; Fang, Y.H.; Son, K.H.; et al. Development of a Closed Air Loop Electropneumatic Actuator for Driving a Pneumatic Blood Pump. Artif. Organs 2009, 33, 657–662. [Google Scholar] [CrossRef]
- Dal Sasso, E.; Bagno, A.; Scuri, S.T.G.; Gerosa, G.; Iop, L. The Biocompatibility Challenges in the Total Artificial Heart Evolution. Annu. Rev. Biomed Eng. 2019, 21, 85–110. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.; Wang, X.; Yang, M. Biocompatible materials of pulsatile and rotary blood pumps: A brief review. Rev. Adv. Mater. Sci. 2020, 59, 322–339. [Google Scholar] [CrossRef]
- Homma, A.; Taenaka, Y.; Tatsumi, E.; Takewa, Y.; Mizuno, T.; Shioya, K.; Lee, H.S.; Tsukiya, T.; Kakuta, Y.; Katagiri, N.; et al. Development of an Electrohydraulic Total Artificial Heart System: Improvement of Pump Unit. Electron. Commun. Jpn. 2010, 93, 34–46. [Google Scholar] [CrossRef]
- Pohlmann, A.; Leßmann, M.; Finocchiaro, T.; Schmitz-Rode, K.T.; Hameyer, K. Numerical Computation Can Save Life: FEM Simulations for the Development of Artificial Hearts. IEEE Trans. Mag. 2011, 47, 1166–1169. [Google Scholar] [CrossRef]
- Pohlmann, A.; Leßmann, M.; Fritschi, A.; Finocchiaro, T.; Steinseifer, U.; Hameyer, K. Experimental validation of the linear drive train for a total artificial heart system. Mechatronics 2013, 23, 222–226. [Google Scholar] [CrossRef]
- Pelletier, B.; Spiliopoulos, S.; Finocchiaro, T.; Graef, F.; Kuipers, K.; Laumen, M.; Guersoy, D.; Steinseifer, U.; Koerfer, R.; Tenderich, G. System overview of the fully implantable destination therapy—ReinHeart-total artificial heart. Eur. J. Cardio-Thorac. Surg. 2015, 47, 80–86. [Google Scholar] [CrossRef] [Green Version]
- Unthan, K.; Gräf, F.; Laumen, M.; Finocchiaro, T.; Sommer, C.; Lanmüller, H.; Steinseifer, W. Design and Evaluation of a Fully Implantable Control Unit for Blood Pumps. BioMed Res. Int. 2015, 2015, 257848. [Google Scholar] [CrossRef] [Green Version]
- Candela, V.; Todesco, M.; Visentin, A.; Meneghetti, G.; Fabozzo, A.; Gerosa, G.; Bagno, A. Preliminary Computational Analysis of Three Configurations for an Innovative Ventricular Chamber. Processes 2020, 8, 1358. [Google Scholar] [CrossRef]
- Todesco, M.; Zardin, C.; Iop, L.; Palmosi, T.; Capaldo, P.; Romanato, F.; Gerosa, G.; Bagno, A. Hybrid membranes for the production of blood contacting surfaces: Physicochemical, structural and biomechanical characterization. Biomater. Res. 2021, 25, 26. [Google Scholar] [CrossRef]
- Greatrex, N.A.; Timms, D.L.; Kurita, N.; Palmer, E.W.; Masuzawa, T. Axial magnetic bearing development for the BiVACOR rotary BiVAD/TAH. IEEE Trans. Biomed. Eng. 2010, 57, 714–721. [Google Scholar] [CrossRef] [Green Version]
- Kleinheyer, M.; Timms, D.L.; Greatrex, N.A.; Masuzawa, T.; Frazier, O.H.; Cohn, W.E. Pulsatile operation of the BiVACOR TAH—Motor design, control and hemodynamics. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 5659–5662. [Google Scholar]
- Greatrex, N.; Kleinheyer, M.; Nestler, F.; Timms, D. The Maglev Heart. IEEE Spectr. 2019, 56, 22–29. [Google Scholar] [CrossRef]
- Miyamoto, T.; Horvath, D.J.; Horvath, D.W.; Kuban, B.D.; Fukamachi, K.; Karimov, J.H. Analysis of Cleveland Clinic continuous-flow total artificial heart performance using the Virtual Mock Loop: Comparison with an in vivo study. Artif. Organs 2020, 44, 375–383. [Google Scholar] [CrossRef] [PubMed]
- Karimov, J.H.; Horvath, D.J.; Fukamachi, K. Cleveland Clinic Total Artificial Heart. In Mechanical Support for Heart Failure; Karimov, J.H., Fukamachi, K., Starling, R.C., Eds.; Springer Nature: Cham, Switzerland, 2020; pp. 493–504. [Google Scholar]
- Glynn, J.; Song, H.; Hull, B.; Withers, S.; Gelow, J.; Mudd, J.; Starr, A.; Wampler, R. The OregonHeart Total Artificial Heart: Design and Performance on a Mock Circulatory Loop. Artif. Organs 2017, 41, 904–910. [Google Scholar] [CrossRef] [PubMed]
- Fresiello, L.; Najar, A.; Brynedal Ignell, N.; Zieliński, K.; Rocchi, M.; Meyns, B.; Perkins, I.L. Hemodynamic characterization of the Realheart® total artificial heart with a hybrid cardiovascular simulator. Artif. Organs 2022, 46, 1585–1596. [Google Scholar] [CrossRef]
- Tozzi, P.; Maertens, A.; Emery, J.; Joseph, S.; Kirsch, M.; Avellan, F. An original valveless artificial heart providing pulsatile flow tested in mock circulatory loops. Int. J. Artif. Organs 2017, 40, 683–689. [Google Scholar] [CrossRef]
- HybridHeart. White Paper on Requirements and Constraints of Combining Technologies. Available online: https://hybridheart.eu/wp-content/uploads/2019/05/Requirements.pdf (accessed on 9 December 2022).
- AbioCor Implantable Replacement Heart. Available online: https://www.accessdata.fda.gov/cdrh_docs/pdf4/h040006b.pdf (accessed on 9 December 2022).
- Luo, C.; Ware, D.L.; Zwischenberger, J.B.; Clark, J.W., Jr. A mechanical model of the human heart relating septal function to myocardial work and energy. Cardiovasc. Eng. 2008, 8, 174–184. [Google Scholar] [CrossRef] [PubMed]
- Yamane, T. How Do We Select Pump Types? In Mechanism of Artificial Heart, 2nd ed.; Springer: Tokyo, Japan, 2016; pp. 13–21. [Google Scholar]
- Wang, Y.; Liang, L.; Wang, W.; Tan, Z.; Sethu, P.; El-Baz, A.S.; Giridharan, G.A. Basis of Artificial Heart Technologies. In Artificial Hearts, 2nd ed.; Yang, M., Ed.; Springer Nature: Singapore, 2020; pp. 31–52. [Google Scholar]
- Rogers, J.G.; Pagani, F.D.; Tatooles, A.J.; Bhat, G.; Slaughter, M.S.; Birks, E.J.; Boyce, S.W.; Najjar, S.S.; Jeevanandam, V.; Anderson, A.S.; et al. Intrapericardial Left Ventricular Assist Device for Advanced Heart Failure. N. Engl. J. Med. 2017, 376, 451–460. [Google Scholar] [CrossRef] [PubMed]
- Hosseinipour, M.; Gupta, R.; Bonnell, M.; Elahinia, M. Rotary mechanical circulatory support systems. J. Rehabil. Assist. Technol. Eng. 2017, 4, 2055668317725994. [Google Scholar] [CrossRef] [Green Version]
- Andriollo, M.; Bettanini, G.; Tortella, A. Design procedure of a small-size axial flux motor with Halbach-type permanent magnet rotor and SMC cores. In Proceedings of the 2013 International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013; pp. 775–780. [Google Scholar]
- Kurita, N.; Ishikawa, T.; Saito, N.; Masuzawa, T.; Timms, D.L. A Double-Sided Stator Type Axial Bearingless Motor Development for Total Artificial Heart. IEEE Trans. Ind. Appl. 2019, 55, 1516–1523. [Google Scholar] [CrossRef]
- Slaughter, M.S.; Rogers, J.G.; Milano, C.A.; Russell, S.D.; Conte, J.V.; Feldman, D.; Sun, B.; Tatooles, A.J.; Delgado, R.M., III; Long, J.W.; et al. Advanced heart failure treated with continuous-flow left ventricular assist device. N. Engl. J. Med. 2009, 361, 2241–2251. [Google Scholar] [CrossRef] [Green Version]
- Abe, Y.; Ono, T.; Isoyama, T.; Mochizuki, S.; Iwasaki, K.; Chinzei, T.; Saito, I.; Kouno, A.; Imachi, K. Development of a miniature undulation pump for the distributed artificial heart. Artif. Organs 2000, 24, 656–658. [Google Scholar] [CrossRef]
- Saito, I.; Chinzei, T.; Abe, Y.; Ishimaru, M.; Mochizuki, S.; Ono, T.; Isoyama, T.; Iwasaki, K.; Kouno, A.; Baba, A.; et al. Progress in the Control System of the Undulation Pump Total Artificial Heart. Artif. Organs 2003, 27, 27–33. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.M.; Huang, M.S. Design and Implementation of a Magnetically Levitated Single-Axis Controlled Axial Blood Pump. IEEE Trans. Ind. Electr. 2009, 56, 2213–2219. [Google Scholar] [CrossRef]
- Hirschhorn, M.; Catucci, N.; Day, S.; Stevens, R.M.; Tchantchaleishvili, V.; Throckmorton, A.L. Channel impeller design for centrifugal blood pump in hybrid pediatric total artificial heart: Modeling, magnet integration, and hydraulic experiments. Artif. Organs. 2022, 00, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Ishii, K.; Hosoda, K.; Isoyama, T.; Saito, I.; Ariyoshi, K.; Inoue, Y.; Sato, M.; Hara, S.; Lee, X.; Wu, S.Y.; et al. Pulsatile driving of the helical flow pump. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 2724–2727. [Google Scholar]
- Puers, R.; Vandevoorde, G. Recent Progress on Transcutaneous Energy Transfer for Total Artificial Heart Systems. Artif. Organs 2001, 25, 400–405. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Yang, Q.; Chen, H. Transcutaneous Energy and Information Transmission System With Optimized Transformer Parameters for the Artificial Heart. IEEE Trans. Appl. Supercond. 2010, 20, 798–801. [Google Scholar]
- Miura, H.; Arai, S.; Kakubari, Y.; Sato, F.; Matsuki, H.; Sato, T. Improvement of the Transcutaneous Energy Transmission System Utilizing Ferrite Cored Coils for Artificial Hearts. IEEE Trans. Magn. 2006, 42, 3578–3580. [Google Scholar] [CrossRef]
- Grzesik, B.; Stepien, M. Topology of TET system with soft switched converters. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012. [Google Scholar]
- Andriollo, M.; Fanton, E.; Forzan, M.; Tortella, A. Design and Analysis of a Dual Mover Linear Oscillating Actuator for a Totally Artificial Heart. In Proceedings of the International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022. [Google Scholar]
- Boldea, I.; Nasar, S.A. Linear Electric Actuators and Generators, 1st ed.; Academic Press: London, UK, 1997; pp. 91–132. [Google Scholar]
- Finocchiaro, T.; Butschen, T.; Kwant, P.; Steinseifer, U.; Schmitz-Rode, T.; Hameyer, K.; Leßmann, M. New linear motor concepts for artificial hearts. IEEE Trans. Magn. 2008, 44, 678–681. [Google Scholar] [CrossRef]
- Llibre, J.F.; Martinez, N.; Nogarede, B.; Leprince, P. Linear tubular switched reluctance motor for heart assistance circulatory: Analytical and finite element modeling. In Proceedings of the 2011 10th International Workshop on Electronics, Control, Measurement and Signals, Liberec, Czech Republic, 1–3 June 2011. [Google Scholar]
- Ji, J.; Yan, S.; Zhao, W.; Liu, G.; Zhu, X. Minimization of Cogging Force in a Novel Linear Permanent-Magnet Motor for Artificial Hearts. IEEE Trans. Magn. 2013, 49, 3901–3904. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, W.; Ji, J.; Chen, Q. A Novel Double-Stator Tubular Vernier Permanent-Magnet Motor With High Thrust Density and Low Cogging Force. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Ji, J.; Zhao, J.; Zhao, W.; Fang, Z.; Liu, G.; Du, Y. New High Force Density Tubular Permanent-Magnet Motor. IEEE Trans. Appl. Supercond. 2014, 24, 1–5. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, Q.; Yu, M.; Ye, Y. A Novel Transverse-Flux Moving-Magnet Linear Oscillatory Actuator. IEEE Trans. Magn. 2012, 48, 1856–1862. [Google Scholar] [CrossRef]
- Yamada, H.; Yano, T.; Wakiwaka, H.; Yamamoto, Y.; Nakagawa, H.; Maeda, Y. Development of high power linear pulse motor for artificial heart. In Proceedings of the 1991 Fifth International Conference on Electrical Machines and Drives (Conf. Publ. No. 341), London, UK, 11–13 September 1991; pp. 110–114. [Google Scholar]
- Chen, X.; Zhu, Z.Q.; Howe, D.; Dai, J.S. Comparative study of alternative permanent magnet linear oscillating actuators. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 2826–2831. [Google Scholar]
- Zhu, Z.Q.; Chen, X.; Howe, D.; Iwasaki, S. Electromagnetic modeling of a novel linear oscillating actuator. IEEE Trans. Magn. 2008, 44, 3855–3858. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Chen, X. Analysis of an E-Core Interior Permanent Magnet Linear Oscillating Actuator. IEEE Trans. Magn. 2009, 45, 4384–4387. [Google Scholar] [CrossRef]
- Sun, J.; Luo, C.; Xu, S. Improvement of tubular linear oscillating actuators by using end ferromagnetic pole pieces. IEEE Trans. Energy Conv. 2018, 33, 1686–1691. [Google Scholar] [CrossRef]
- Watada, M.; Yanashima, K.; Oishi, K.; Ebihara, D. Improvement on characteristics of linear oscillatory actuator for artificial hearts. IEEE Trans. Magn. 1993, 29, 3361–3363. [Google Scholar] [CrossRef]
- Lu, H.; Zhu, J.; Lin, Z.; Guo, Y. A Miniature Short Stroke Linear Actuator—Design and Analysis. IEEE Trans. Magn. 2008, 44, 497–504. [Google Scholar]
- Ahmad, Z.; Khan, H.A.; Khan, S.; Ullah, B.; Khalid, S.; Akbar, S. Design and Analysis of a Novel Dual Stator Tubular Moving Magnet Linear Actuator for Compressor Application. In Proceedings of the 2021 International Conference on Frontiers of Information Technology (FIT), Islamabad, Pakistan, 13–14 December 2021; pp. 299–304. [Google Scholar]
- Yan, S.; Ji, J.; Wang, F.; Liu, G. New tubular fault-tolerant permanent-magnet motor for artificial heart. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–5. [Google Scholar]
- Birbilen, U.; Lazoglu, I. Design and Analysis of a Novel Miniature Tubular Linear Actuator. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar] [CrossRef]
- Saotome, H.; Shimizu, K.; Okada, T. Design of Magnetic Actuator Intended for Artificial Heart Drive. Trans. Magn. Soc. Jpn. 2004, 4, 64–66. [Google Scholar] [CrossRef]
- Kim, S.H.; Hashi, S.; Ishiyama, K. Actuation of Novel Blood Pump by Direct Application of Rotating Magnetic Field. IEEE Trans. Magn. 2012, 48, 1869–1874. [Google Scholar] [CrossRef]
- Xia, D. A Bionic Artificial Heart Blood Pump Driven by Permanent Magnet Located Outside Human Body. IEEE Trans. Appl. Supercond. 2012, 22, 4401304. [Google Scholar]
- Mustafa, D.; Hussain, A. A Survey on the Design and Analysis of Magnetic Screws. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 3759–3766. [Google Scholar]
- Schenk, S.; Weber, S.; Luangphakdy, V.; Klatte, R.S.; Flick, C.R.; Chen, J.F.; Kopcak, M.W., Jr.; Ootaki, Y.; Kamohara, K.; Hirschman, G.B.; et al. MagScrew Total Artificial Heart In Vivo Performance Above 200 Beats Per Minute. Ann. Thorac. Surg. 2005, 79, 1378–1383. [Google Scholar] [CrossRef] [PubMed]
- Ji, J.; Ling, Z.; Wang, J.; Zhao, W.; Liu, G.; Zeng, T. Design and analysis of a Halbach magnetized magnetic screw for artificial heart. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Ling, Z.; Ji, J.; Wang, F.; Bian, F. Design and analysis of a field modulated magnetic screw for artificial heart. AIP Adv. 2017, 7, 056717. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Szabó, L. A Survey on Rotary-Linear Motors Used in Emerging Applications. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 3257–3262. [Google Scholar]
- Nezamabadi, M.M.; Afjei, E.; Torkaman, H. Design, Dynamic Electromagnetic Analysis, FEM, and Fabrication of a New Switched-Reluctance Motor With Hybrid Motion. IEEE Trans. Magn. 2016, 52, 1–8. [Google Scholar] [CrossRef]
- Jin, P.; Fang, S.; Lin, H.; Zhu, Z.Q.; Huang, Y.; Wang, X. Analytical Magnetic Field Analysis and Prediction of Cogging Force and Torque of a Linear and Rotary Permanent Magnet Actuator. IEEE Trans. Magn. 2011, 47, 3004–3007. [Google Scholar] [CrossRef]
- Krebs, G.; Tounzi, A.; Pauwels, B.; Willemot, D.; Piriou, F. Modeling of A Linear and Rotary Permanent Magnet Actuator. IEEE Trans. Magn. 2008, 44, 4357–4360. [Google Scholar] [CrossRef]
- Miric, S.; Giuffrida, R.; Rohner, G.; Bortis, D.; Kolar, J.W. Design and Experimental Analysis of a Selfbearing Double-Stator Linear-Rotary Actuator. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021. [Google Scholar]













| TAH | Type | Mass (g) | Volume (mL) | Power Supply | Output (l/min) | Input Power (W) | Total Efficiency (%) |
|---|---|---|---|---|---|---|---|
| Aeson CARMAT [18] | FD | 900 | 750 | Percutaneous | 2–9 | N.A. | N.A. |
| BiVACOR [35,36,37] | CF | 650 | N.A. | Percutaneous | 3–12 | 15.5 | N.A. |
| Cleveland [38,39] | CF | 486 | 160 | Percutaneous | 7.4 | 12.9 | 13.3 |
| OregonHeart [40] | CF | N.A. | 130 | Percutaneous | 7.5 | 10.0 | 17.5 |
| Realheart [41] | EM | 800 | 1.790 | TET | 2.7–8.2 | N.A. | N.A. |
| ReinHeart [29,30,31,32] | EM | 940 | 550 | TET | 5.5 | 12.5 | 10 |
| RollingHeart [42] | EM | N.A. | 704 | Percutaneous | 5.3 | 14.0 | 14.1 |
| SynCardia 70cc [14] | FD | 240 | 400 | Percutaneous | 9.5 | N.A. | N.A. |
| HybridHeart [43] | FD | <900 | N.A. | TET | 2–8 | 34 | 6.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andriollo, M.; Fanton, E.; Tortella, A. A Review of Innovative Electromagnetic Technologies for a Totally Artificial Heart. Appl. Sci. 2023, 13, 1870. https://doi.org/10.3390/app13031870
Andriollo M, Fanton E, Tortella A. A Review of Innovative Electromagnetic Technologies for a Totally Artificial Heart. Applied Sciences. 2023; 13(3):1870. https://doi.org/10.3390/app13031870
Chicago/Turabian StyleAndriollo, Mauro, Enrico Fanton, and Andrea Tortella. 2023. "A Review of Innovative Electromagnetic Technologies for a Totally Artificial Heart" Applied Sciences 13, no. 3: 1870. https://doi.org/10.3390/app13031870
APA StyleAndriollo, M., Fanton, E., & Tortella, A. (2023). A Review of Innovative Electromagnetic Technologies for a Totally Artificial Heart. Applied Sciences, 13(3), 1870. https://doi.org/10.3390/app13031870