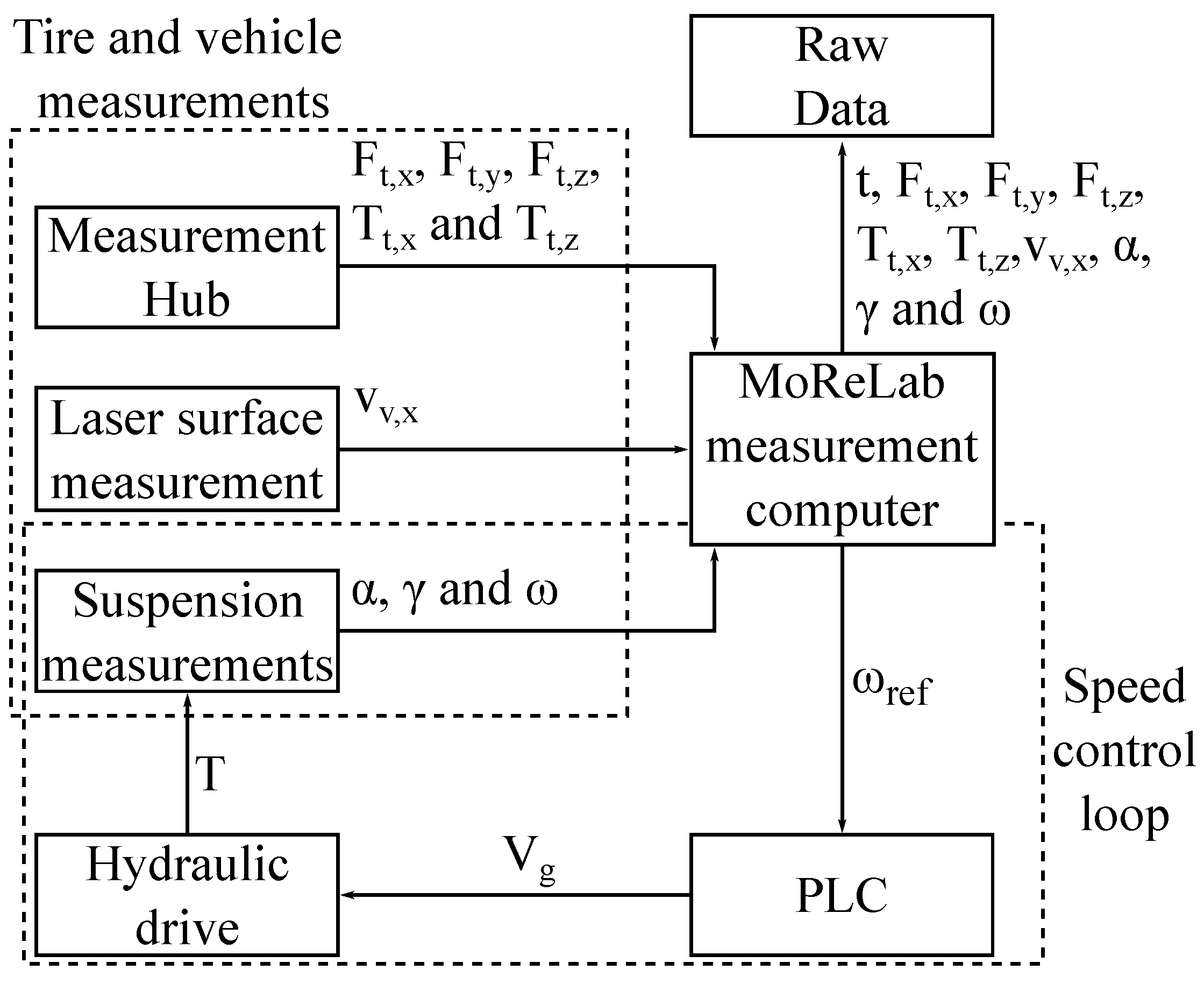
The following section shows the processing of the measured data. First, the raw data and corresponding measurements were described. Afterward, the offset correction was performed. The data were finalized by compensating the crosstalk with the help of a matrix method. All experiments were carried out at an outside temperature greater than 10 °C and less than 20 °C. Furthermore, the measurements were only taken on days without rain, and thus when the asphalted road in Vauffelin was dry. Despite light cloud cover, an asphalt temperature of approximately 20 °C was measured during the tests. Since the tires were subjected to high loads during the experiments, it was expected that they will wear out in a short period of time. For this reason, 15 tires of the same size and type were available for the experiments. The tires were changed as soon as the tread had almost completely worn off. If partial measurements were made with worn tread, they were not included in the total measurement data, since they were marked and excluded in the post-processing. To provide structure to the subsequent post-processing, the steps from raw unprocessed data to data prepared for modeling are shown in
Figure 5. As can be seen from the diagram, in a first step, the offset of the raw data was corrected. Due to the scatter that was still present after the offset correction, smoothing was performed using the robust, locally weighted scatterplot smoothing (RLOWESS). The resulting lower weighting of outliers reduced their effect on the outcome. The final step of the post-processing regarding the crosstalk compensation of the measurement system was based on the unsmoothed but offset corrected data. To minimize still present scatter, the crosstalk compensated data were smoothed afterward using RLOWESS.
3.1. Post-Processing
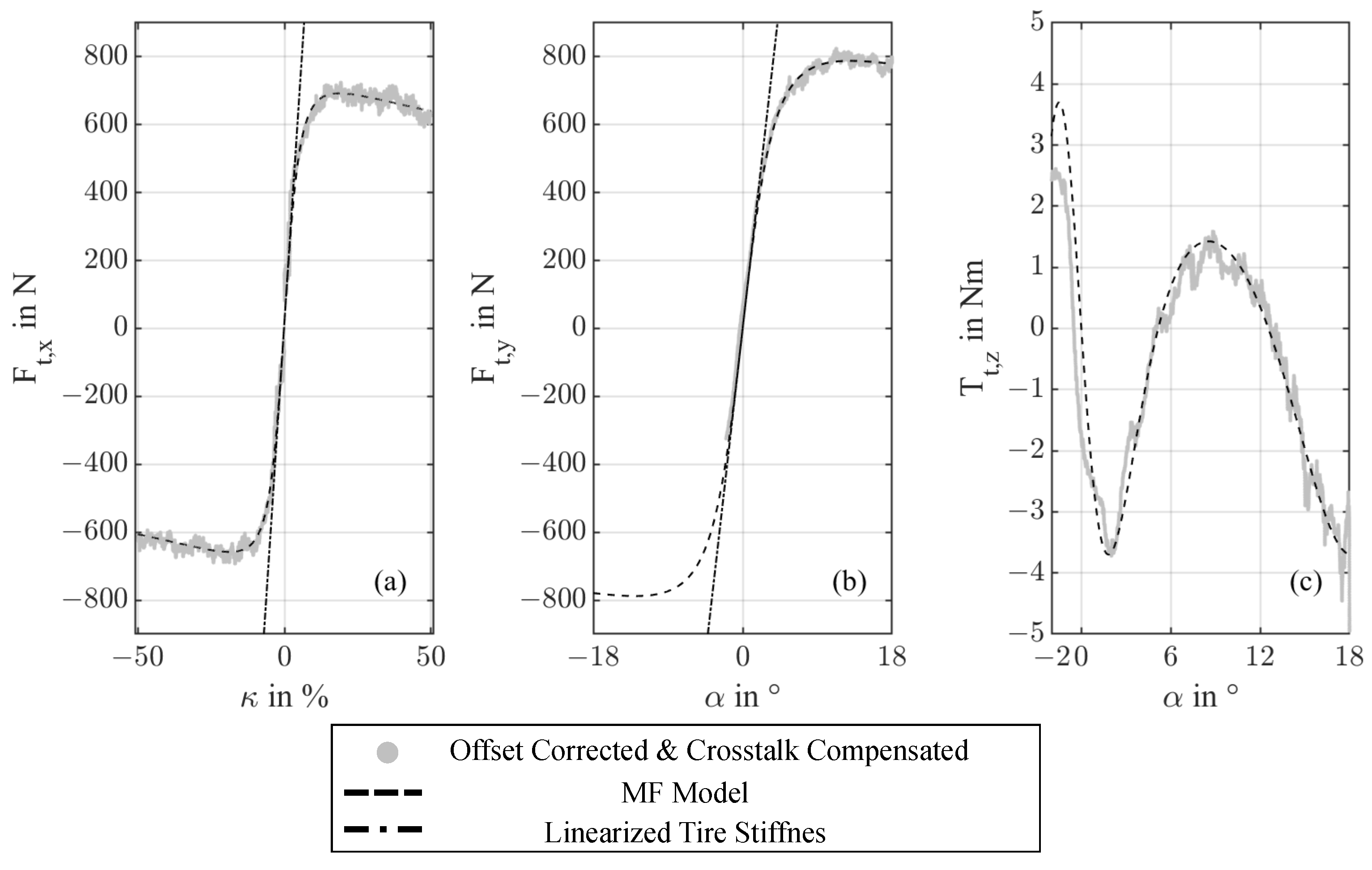
Figure 6 presents the data of test no. 3.1. The diagram is divided into the results of the acceleration and braking tests that cover
, which are listed in
Figure 6a. The results of the steering test are shown in (b) as
and (c) shows the relation
.
In a first step, the raw data are analyzed more closely, which is visualized as a black point cloud and shows a large scatter for
,
and
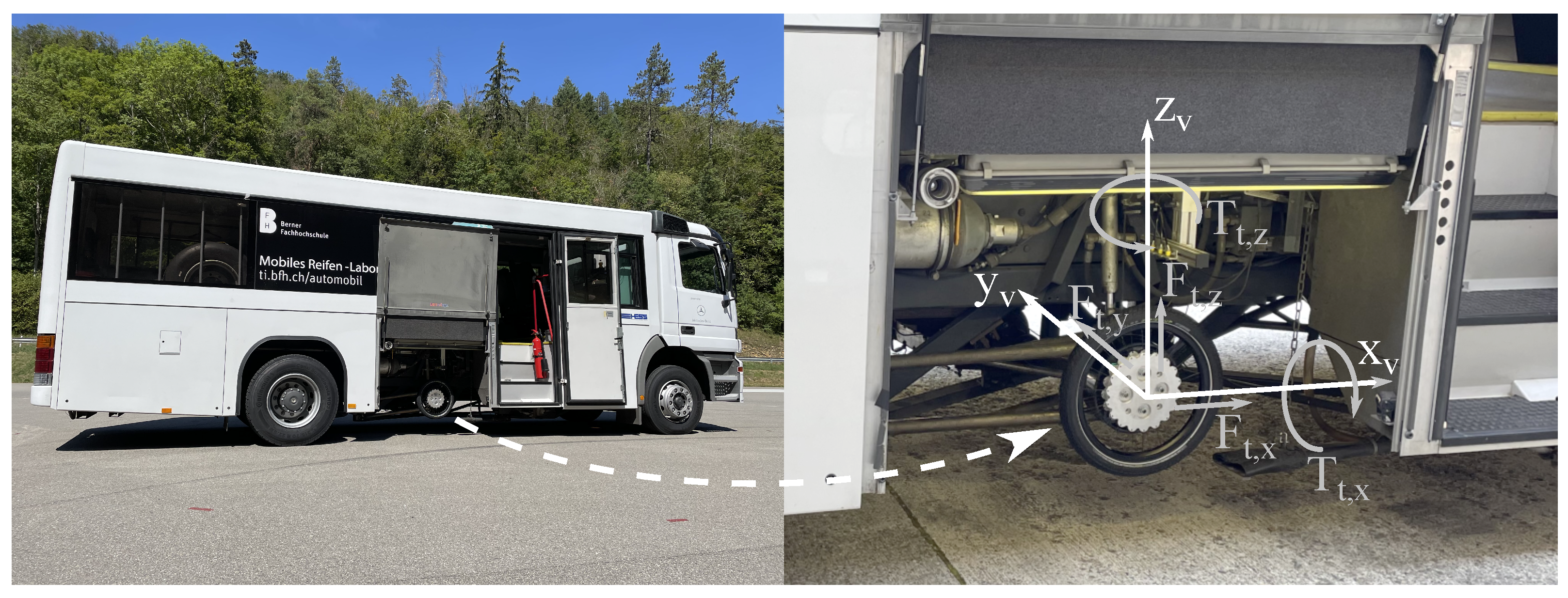
. This results, in part, from the not exactly reproducible environmental conditions, such as the asphalt condition, tire wear or the temperature. In addition, there is a fluctuation in the contact force
that the test truck exerts on the tire. The pneumatic adjustment of the contact force must be repeated after each tire change. A noticeable behavior can be seen in diagram (c), which shows the drift of the raw
data when the slip angle
is larger than 8
. It is assumed that the crosstalk of the measurement system is responsible for this effect, since investigations according to [
16] specify a different shape of the base curve of
. In contrast to the base curve, which generally has two zero crossings and a minimum in-between, only one zero crossing and a subsequent drifting of the
curve in the direction of
, as can be observed in the raw data. The proof of this assumption is provided by the crosstalk correction described later in this section. After its application, the
data show a second zero-crossing and a minimum between the first and second zero-crossing, as can be seen in
Figure 6c. To draw conclusions about the real behavior of the tire from the data, the offset of the measurement system is compensated first. Within the scope of the offset correction, an attempt is made to compensate the measurement error of the system which results, for example, from hysteresis. For this purpose, load-free conditions are set before and after each measurement series, so the unloaded condition offset of the force channels can be measured. Resulting offset values for test no. 3.1 are listed in
Table 2. The recorded offsets of
,
and
before and after the measurement series of one test case, e.g., driving for test no. 3.1 are used to calculate a straight line passing through the offset points. Subsequently, this straight line is subtracted from the measurement data. Offset-corrected and RLOWESS smoothed data are represented in
Figure 6 as a dark gray point cloud. Since the offset data are recorded for the force sensors, but not for the measurement of torque, diagram (c) does not show an offset-corrected dataset. The offset still existing after the compensation, especially for the measurements of
and
, results from a default setting of
and
of the measurement equipment, which is not exactly at 0
. A more precise setup of these parameters is not possible.
Compared to the raw data, the offset-corrected data of
and
show a similar linear trend at the beginning. However, with the beginning of the non-linear range at
≥ 4% or
≥ 5
, the deviation of the graphs increases. At this point, the offset corrected graphs exceed the mean of the raw data. This behavior is particularly clear when looking at
for
≥ 12
. Considering
Table 2, this behavior can be explained as the offset measurement of
after the test case “steer” is far below 0 N. The same applies to all other axes, whose values after the test cases deviate further from 0 N than the values measured before the test case. Further,
and
show an oscillatory force characteristic for the ranges
> 15% and, respectively,
> 8
in the nonlinear region.
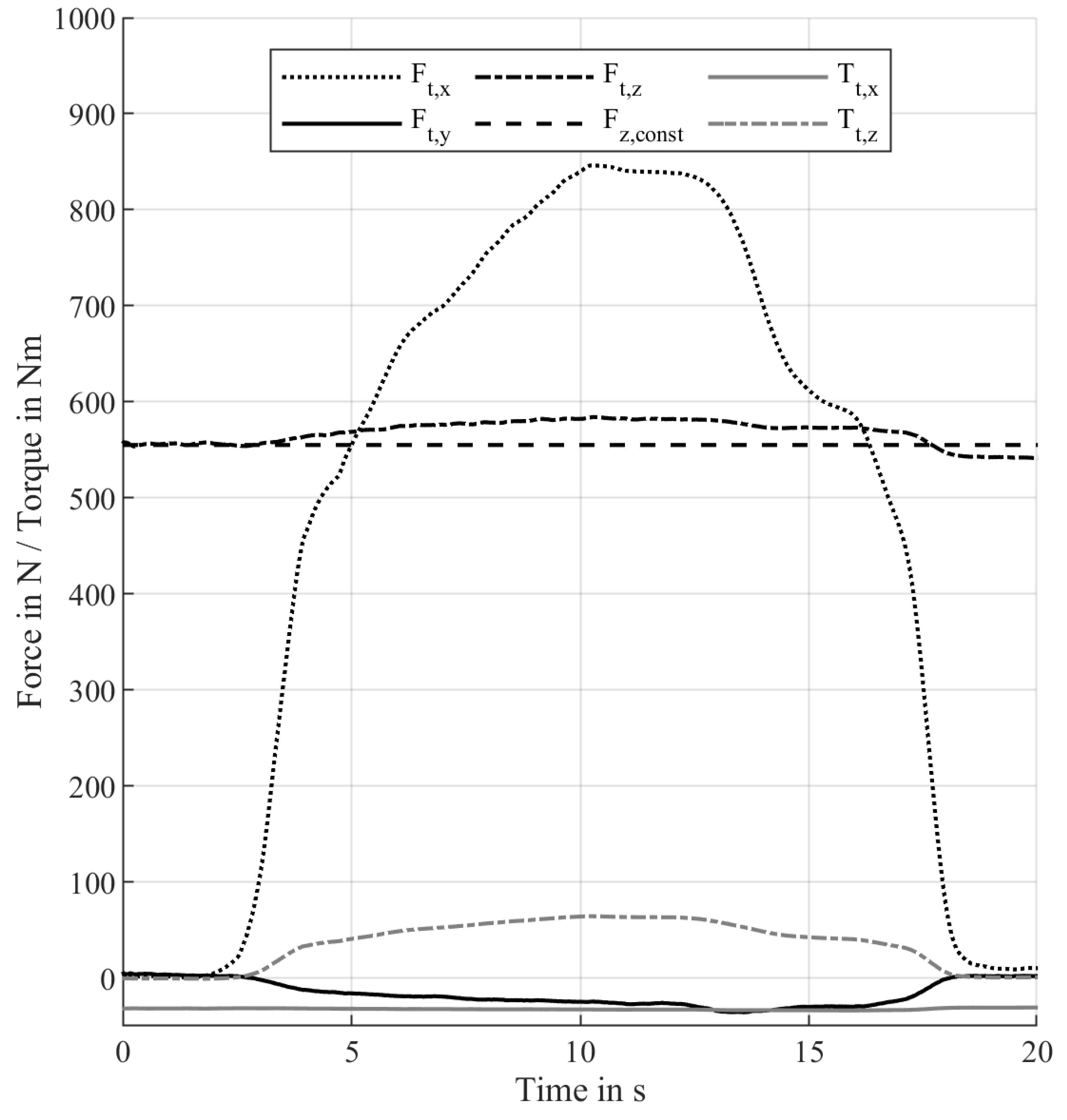
As already explained, it can be assumed that the measurement system suffers from crosstalk. For this reason, test measurements were carried out to identify the crosstalk and its effects. By applying an increasing force in the x-direction, whether all other channels show a change as well or whether they remain unchanged is unexamined. The results of the investigation are shown in
Figure 7.
As can be seen from
Figure 7, all other channels except
show increasing or decreasing behavior, which rises with a higher force in x-direction, although they should not undergo a significant force or torque change. For this reason, the confirmed crosstalk is compensated.
Measurements with the MoReLab are normally made with a measurement rim with an offset of 60 mm, so the use of the adapter rim with an offset of 5 mm results in a different behavior, with a crosstalk effect that has to be corrected. For this reason, the crosstalk of the force and torque measurements is evaluated more closely in the subsequent section. Since [
22] describes similar effects for this kind of measurement device, the method he described for crosstalk compensation of force sensors is also used in the proposed research. Therefore, according to [
22], a correction matrix
K is created by applying a defined force in one direction, while the effects on all other channels that measure forces and torques are recorded. The introduced force or torque is applied via an adapter that geometrically corresponds to the adapter rim, so that all existing lever ratios that will appear during the tire measurements are considered. The procedure is carried out on all axes by applying a force, followed by a defined torque on all axes. Because the measurement hub of the test truck does not have a brake and is only driven by a hydraulic driveshaft, the torque of the y-axis cannot be measured. For this reason, the correction matrix of [
22] is reduced by one column and one row. The objective is to determine the effects that the introduction of a static force or torque to adapter rims geometry have on the measurements of the remaining axes. From uncorrected tire measurements, a maximum force of 1000 N and a maximum torque of 15 Nm can be expected. Based on these expected values, a slightly larger input force and torque were used in these experiments to cover the range needed for the tire measurements. The input forces and torques, as well as the resulting output values on all other channels, can be seen in
Table 3.
Subsequently, the correction matrix
K was obtained from the crosstalk data listed in
Table 3 by dividing each output value of a column by the applied input force or torque.
Finally, the inverse of the
correction matrix
K was determined to solve Equation (
8). Matrix
O is defined as the
raw data matrix and
X as the final and crosstalk-compensated
output matrix.
The crosstalk compensated and RLOWESS smoothed data are shown as a purple point clouds in
Figure 6. The crosstalk correction slightly raises the curve in
and
compared to the pure offset-compensated data. The most significant effect of the crosstalk correction is visible on the curve of
. While
shows a strong drift before the crosstalk correction, the behavior after the correction corresponds to the base curve of [
16] with a zero crossing around
= 0
and
= 5
. In addition, the processed
data have a minimum location between the first and second zero-crossing at around
= 2.5
. While the base curve after [
16] shows an asymptotic approximation for high slip angles, this cannot be observed even in the crosstalk-compensated data from the present investigations. One explanation for this is the detachment of the tire casing from the rim at high slip angles, which was observed during the tests. Compared to car or truck tires that are used without an inner tube, tires with an inner tube can exhibit this behavior without losing pressure. In the crosstalk-compensated data, the effect is reflected at values of
> 10
. The resulting impact on the shear stress distribution in the contact area of the tire causes nonlinear effects, which lead to new reductions in
for
> 13
. These effects have not yet been analyzed in detail within this framework, but they exhibit a fundamentally different behavior than tubeless car or truck tires. Since a tire slip from −50% to 50% and a slip angle from −2
to 18
were used in the measurements, the saturation of the tire for
and
is clearly visible in
Figure 6. Therefore, data quality is only obtained after post-processing obtained, which allows for a realistic modeling on the basis of the collected data.
3.2. Observations during the Measurement
During the test campaign, some noticeable findings were observed that contain:
Loose spokes of the adapter rim after steering measurements;
High tire abrasion after steering measurements;
Thin high-temperature line on the tire surface.
When measuring
and
an increased occurrence of slightly loose spokes in the rim during the steering measurement series was observed. A possible explanation for this effect is based on the assumption that bicycle rims are developed for driving with higher camber angles; the high
values with
= 0
during the measurements can bend the rim. As a consequence, the spokes can be stressed by compressive forces even though they are optimized for tensile forces. The compressive force can relieve the spoke nipples and, consequently, the threads, which can then be loosened by oscillations in the system, as seen in
Figure 6b for
> 6
. The spokes were checked after each series of measurements and tightened if necessary.
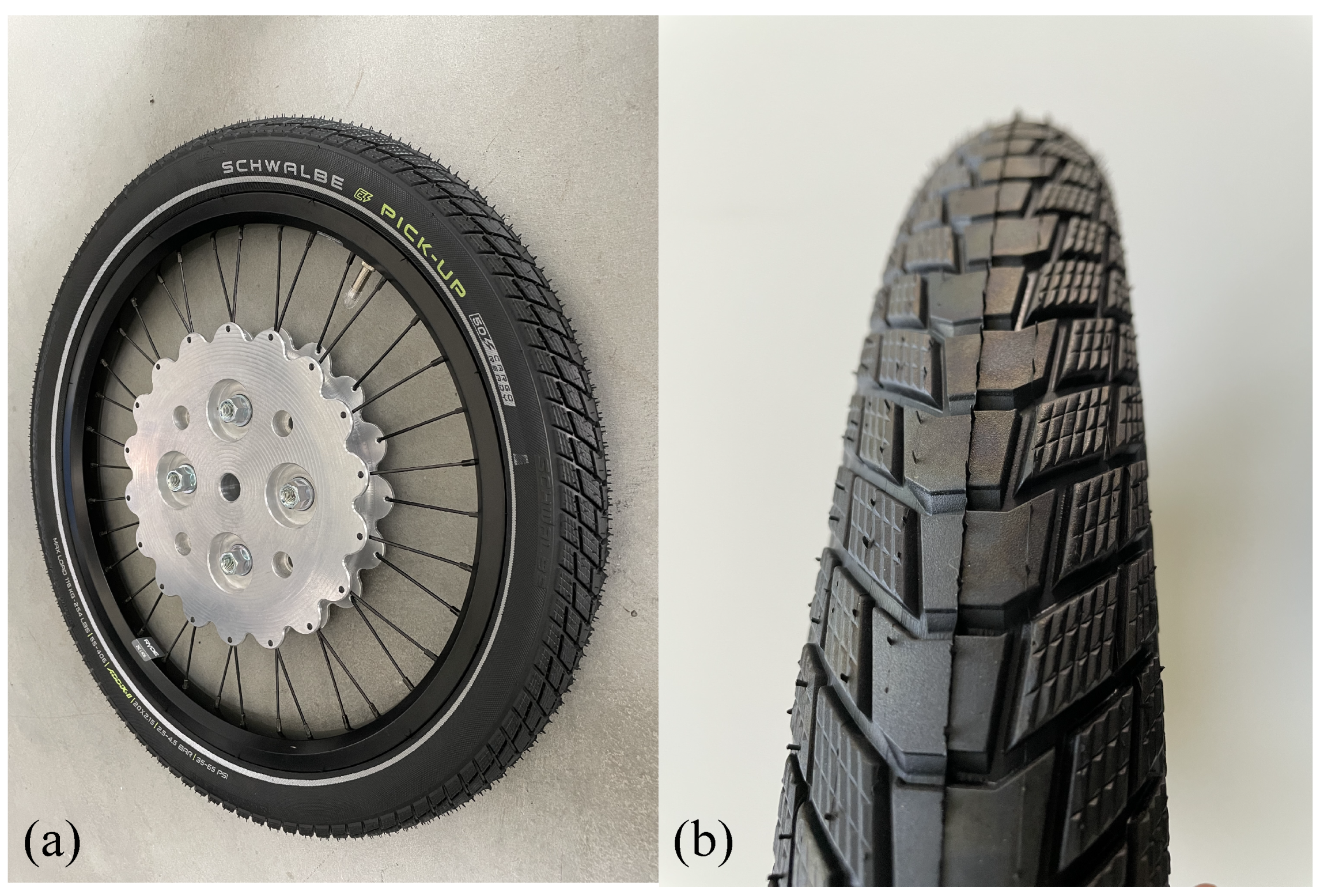
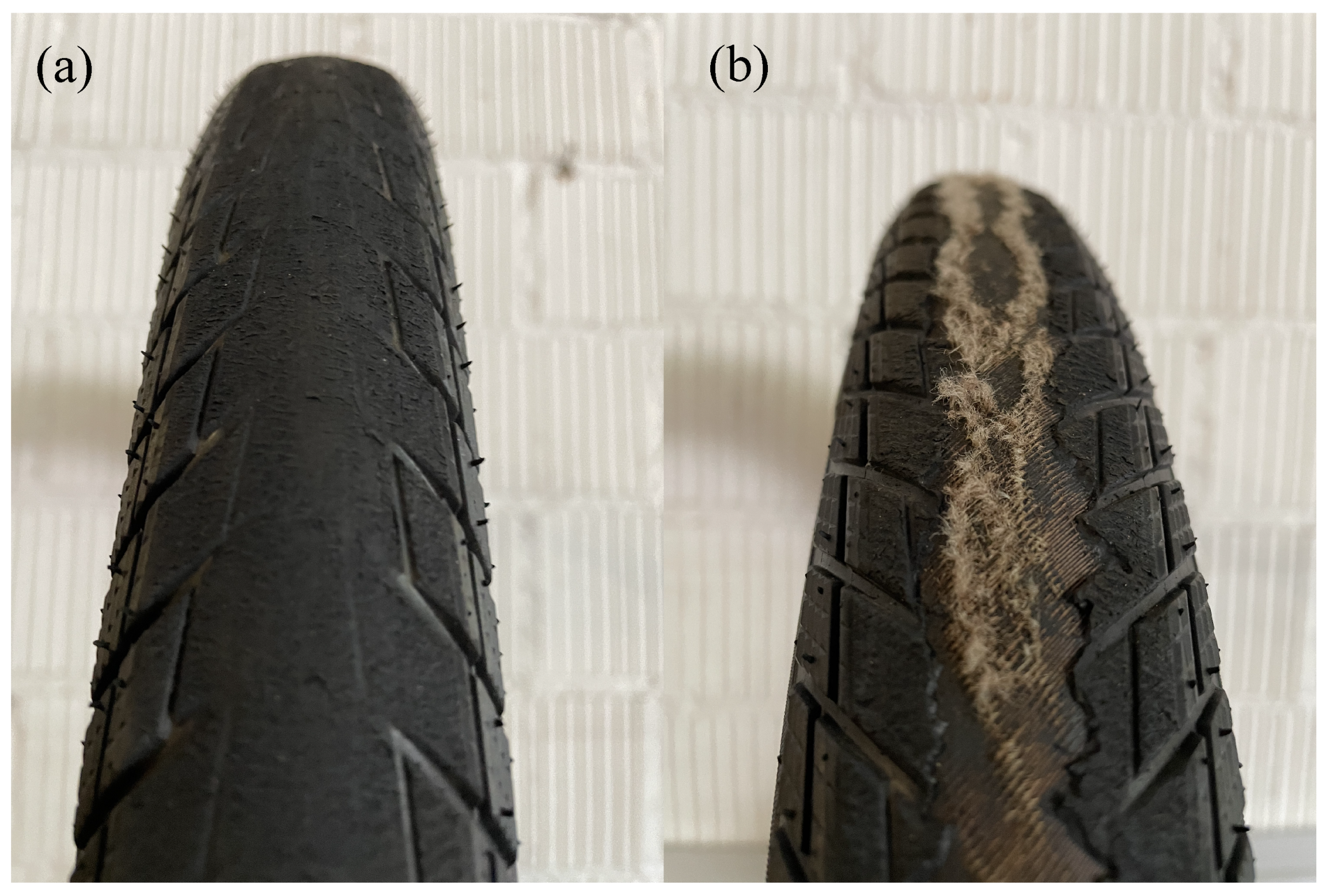
Due to the high loads during the bicycle tire tests, a high level of tire abrasion was noticed. As the used tires do not have a mark for replacement, they were used until the tire tread was completely worn away. The complete removal of the tread by a series of measurements can be seen in
Figure 8a.
Figure 8b shows a tire that was overstressed as the internal mesh became visible. Measurements made with overstressed tires were not included in the evaluation, since the detached tread of the tire has a strong impact on the adhesion values.
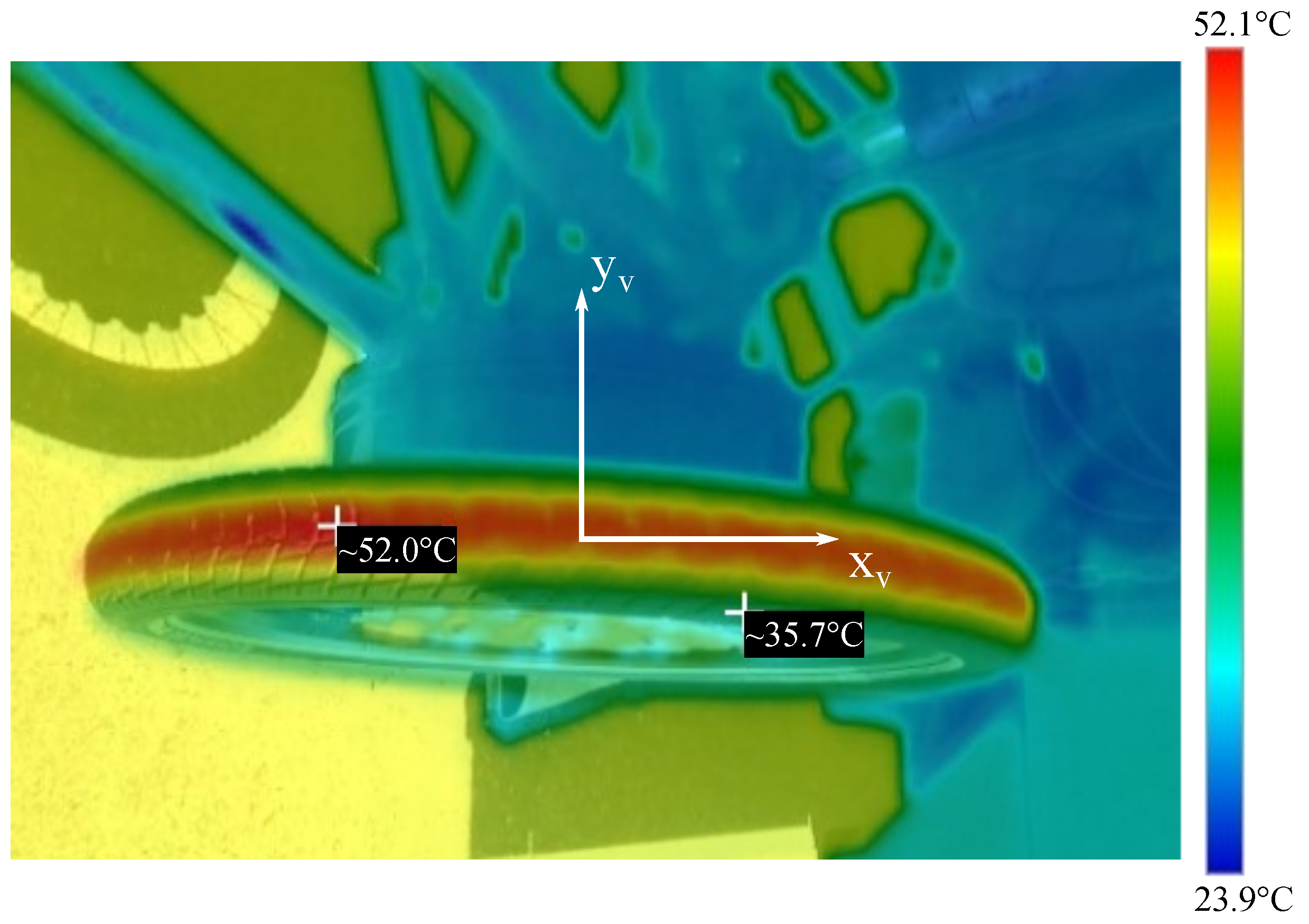
In order to evaluate the temperature behavior of the tires more accurately, the image shown in
Figure 9 was obtained after a series of 18 steering measurements with the aid of a thermal imaging camera. As can be seen from the Figure, a thin line forms in the center of the tire, which reaches temperatures of approx. 52 °C. After a slim transition layer, the tire reaches a temperature of approx. 36 °C at the edge. Since the tire is driven without any camber angle, there is little to no friction at the edge areas of the tire. The local heat zones thus correspond to the overstressed tire tread shown in
Figure 8b. Furthermore, the thermal imaging can ensure that a new tire survives a measurement series of 18 measurements without excessive temperatures. The tire image in
Figure 8b is, therefore, the result of excessive testing.
3.3. Tire Modeling
The modeling of the tire behavior according to Equation (
4) was carried out using the offset-compensated, crosstalk-corrected and RLOWESS-averaged data. The coefficients were optimized using the non-linear least squares method with the aid of the trust region algorithm, so that the model fit the data as accurately as possible. Since the model represents both
,
and
the coefficients carried the following indices
i:
x for MF coefficients used to model ;
y for MF coefficients used to model ;
z for MF coefficients used to model .
A modified form of Equation (
4) was further recommended according to [
16] for modeling
. This involves replacing the sine function in Equation (
4) with a cosine function, which results in a different shape of the curve that has proved to have more accuracy when fitting the measured values of
.
The resulting equation is given by:
Thus,
and
were subsequently modeled using Equation (
4), while the model of
was created using Equation (
9). Furthermore, the longitudinal and lateral stiffness of the tires
and
can be obtained from the MF coefficients after fitting the models with:
and:
After post-processing of the measurement data, a small offset and shift was still present. For the measurements of the vertical offset was caused by the rolling resistance. Therefore, a horizontal shift of the model was accepted during optimization via the parameter . Since no ply-steer and conicity effects are expected for a bicycle tire, the parameter was not considered and remains at 0.
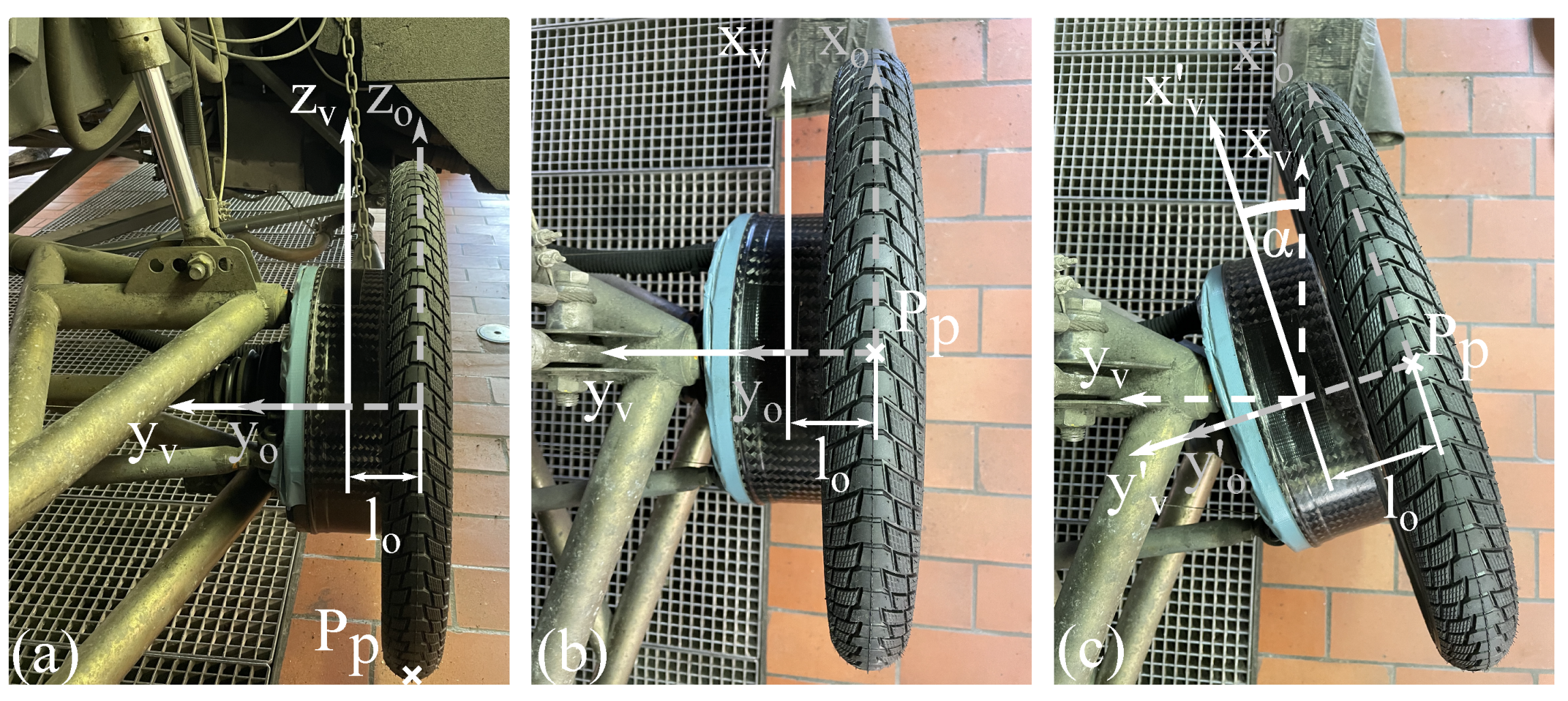
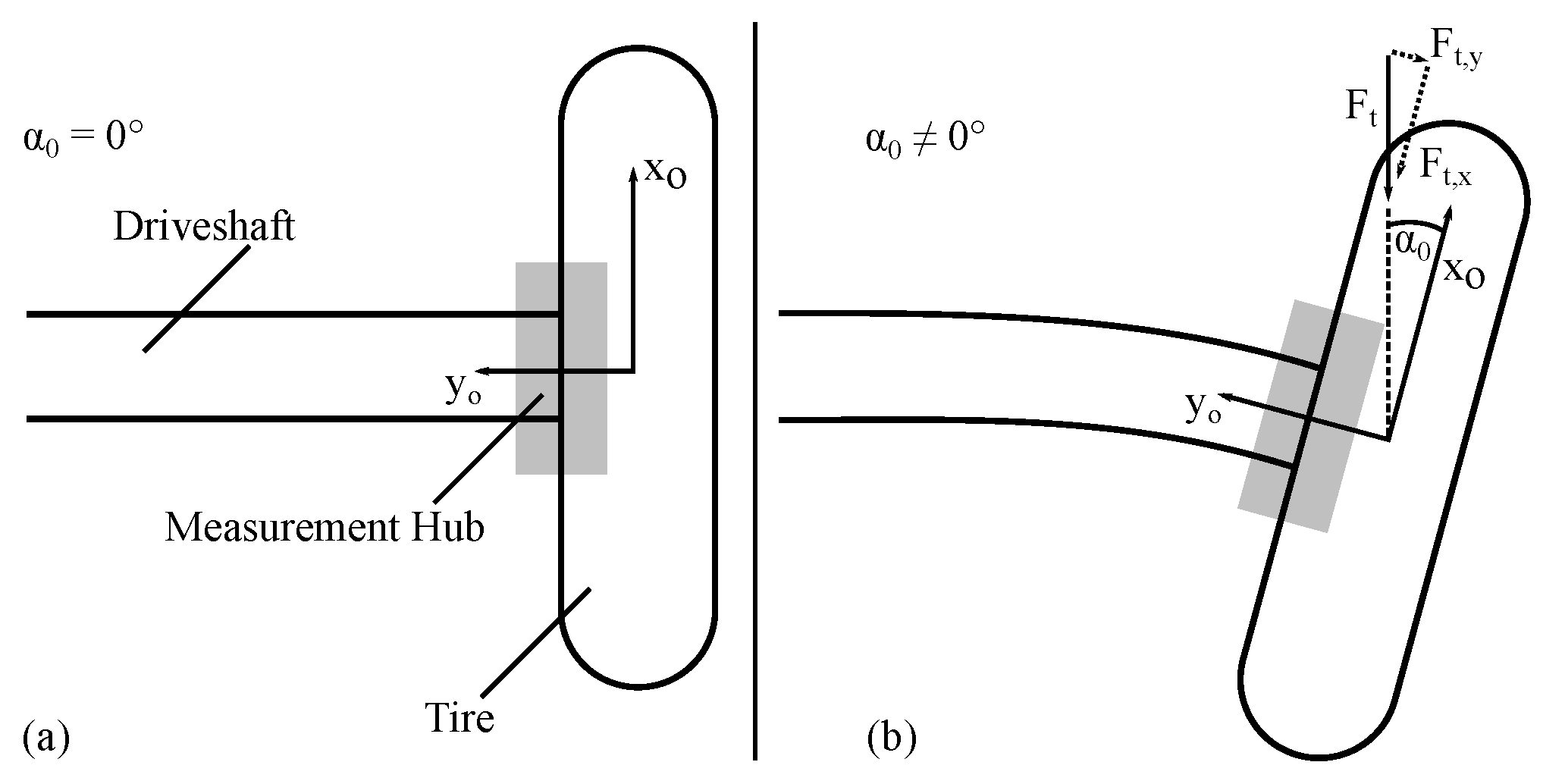
However, the not precisely adjustable zero position of the slip angle
= 0
of the test truck leads to a shift in the post-processed data of the
and
measurements. Furthermore, the lever arm discussed in
Section 2.1.1 can result in an unintended torque around the z-axis, which leads to the elastic deformation of the fixture of the measurement wheel shown on
Figure 10. As a result of the errors mentioned above, the angle
iwa affected by means of
≠ 0
.
The average horizontal shift error
of all tests due to misalignments of
at
=
for
results in 1.2%. The horizontal shift error
due to misalignment of
at
= 0
for
is given as 1.7% compared to the full scale angle of 20
. Despite the described error, the model that is to be developed is supposed to follow the physical conformity of tires with
= 0
. Based on this consideration, the modeling of
and
is carried out with the conditions
= 0 N and
= 0 Nm, although
and
are slightly visible in the data. As a consequence, the MF coefficients
and
for the model of
resulted in a fixed value of 0. Due to the cosine function in Equation (
9), a small shift must be allowed to maintain
= 0 Nm, to provide an optimal fit of the model to the data. Therefore, the coefficient
was limited to 0 for the modeling of
, while
≠ 0 allowed a small shift to achieve a zero transition at
. The models created under these boundary conditions for test no. 3.1 are shown in
Figure 11, while the
Table 4,
Table 5 and
Table 6 show the MF coefficients as well as the models normalized root mean squared error (NRMSE) for all tests that were carried out. The normalization of the root mean squared error (RMSE) was performed with respect to the range of measured values described by Equation (
12).
Depending on the case,
y must be replaced by
,
or
. The data and figures for the remaining tests can be found in [
18].
As can be seen from
Figure 11, with respect to
Table 4,
Table 5 and
Table 6, it is possible to fit the measured and post-processed data of a bicycle tire with the MF Equations (
4) and (
9). The model of
allows for the representation of
for
< −2
. The model of
was only plotted for
values from −2
to 18
. This results from the modeling of
using Equation (
9), which shows no symmetric behavior for the coefficients that were used. For this reason,
must be intersected, inverted and flipped at
= 0
to obtain a model of
in the range
< 0
. The calculated coefficients used to model
,
, and
, as well as the goodness of fit of the models, are shown in
Table 4,
Table 5 and
Table 6. As can be seen from the tables, by optimizing the coefficients, it is possible to model all measured values of the six tests using the MF model with an R
2 value > 0.9. Therefore, the choice of coefficients results in a suitable model quality.
With respect to the NRMSE, minimum and maximum values from 0.009 to 0.074 indicate an overall good model fit. A larger error of
than
can be obtained for most cases. This effect results from the sharpness of the measured curves of
, which will lead to difficulties in modeling with the coefficients B, C, D and E. Reference [
16] refers to the introduction of a new parameter
H in an extra term of Equation (
4), whereby the sharpness of the curve can be modeled more accurately. Since a basic MF model was used in the present research, this parameter is not considered. Slightly increased values of the NRMSE for the goodness of fit of the model of
result from the described shift in the measured data, which was corrected by the boundary conditions during modeling. In addition, Equation (
9) of the MF model used is capable of representing even the missing asymptotic behavior for large slip angles, as shown in
Figure 11 for
> 10
.
3.4. Impact of Tire Pressure and Normal Force
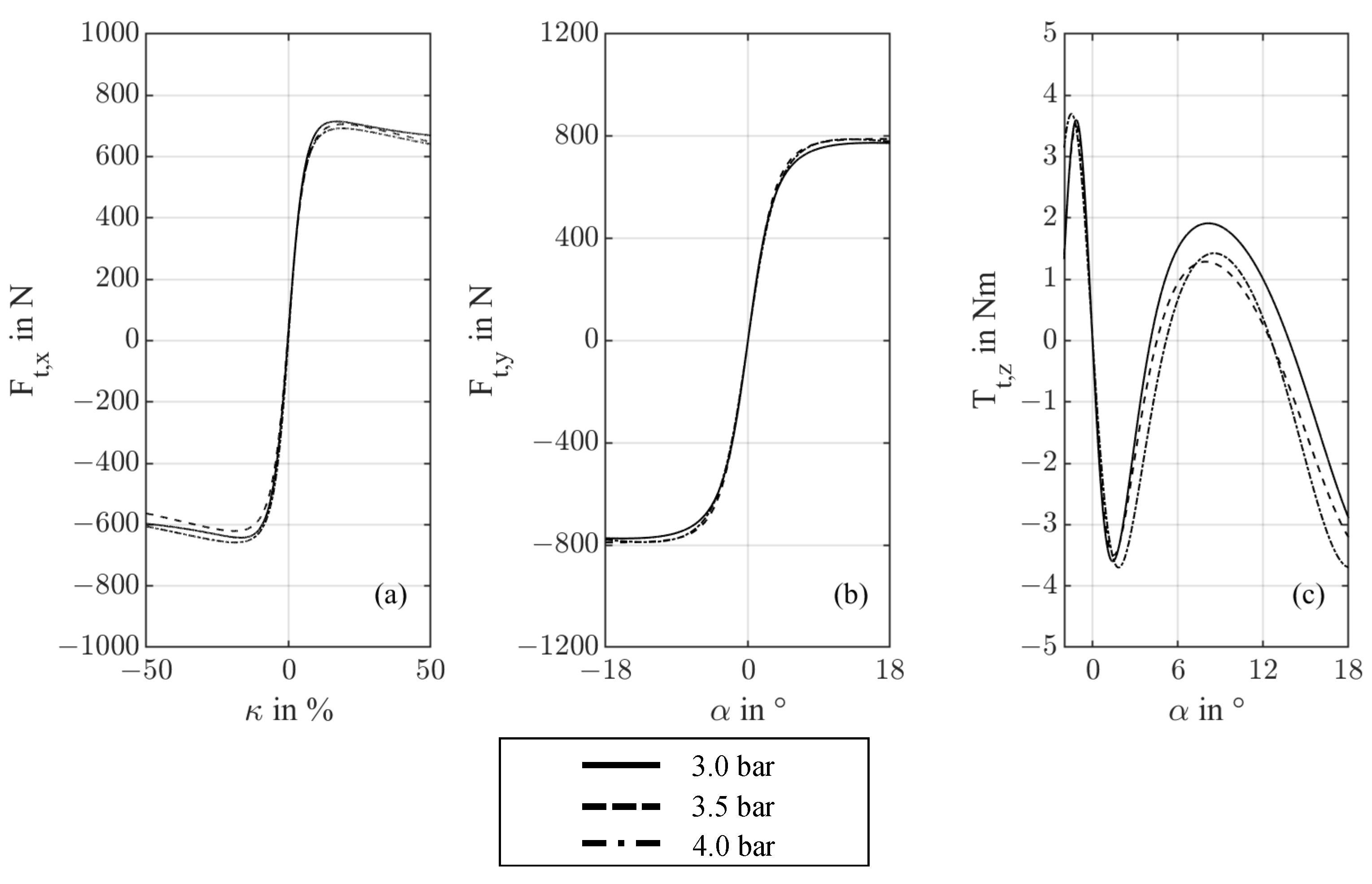
To investigate the impact of tire pressure on the measurements,
Figure 12 shows the model curves of
,
and
at a normal force of 625 N and tire pressures of 3.0, 3.5 and 4.0 bar. As can be seen from (a), (b) and (c) in
Figure 12, a change from 1 bar to the tire pressure only had a minor effect on the maximum transmittable longitudinal and lateral forces, as well as the aligning torque of the bicycle tire tested when
= 625 N. In addition, the slope of the models in the linear range remains almost the same.
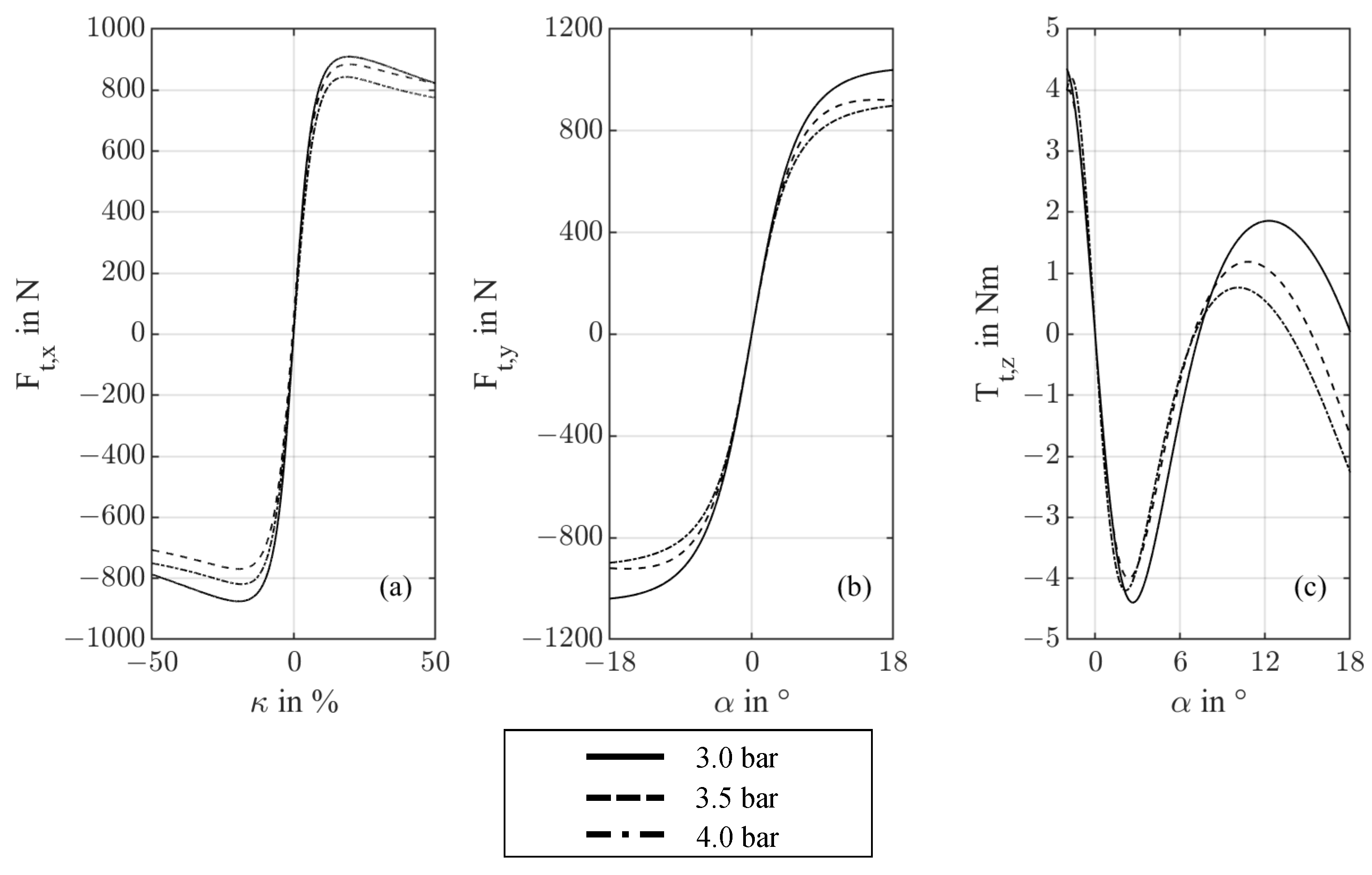
The impact of changing the tire pressure from 3 bar to 4 bar in steps of 0.5 bar on the longitudinal and lateral forces
and
as well as the aligning torque
at
= 765 N is shown in
Figure 13.
Compared with the measurements at
= 625 N, a contact force of
= 765 N results in a significantly larger spread of the force curves
and
in the range of
> 10% and
> 4
at different tire pressures. Furthermore, the three-bar model curve can reach the highest force values in both the longitudinal and lateral direction. However, the four-bar curve produces the lowest force values in both directions. By comparing the curves of
= 625 N and
= 765 N, it is clear that the effects of different tire pressures are more significant for a higher value of
. For example, by comparing
=
at
= 25% for
= 625 N and
= 765 N.
results in 17.6 N for
= 625 N.
for
= 765 N results in 70 N. The effect is more significant when looking at
=
at
= 9
and
= 625 N as well as
= 765 N.
for
= 625 N results in 21.8 N
at
= 765 N reaches 118.6 N. It is assumed that the wire-reinforced carcass of the bicycle tire prevents a significant increase in the contact area when the tire pressure is reduced. A larger tire contact area is achievable at higher values for
, which results in a higher transmittable longitudinal and lateral force. Therefore, the effects of the tire pressure are only slightly visible on the model curves of the
= 625 N, but are clearly visible in the model curves of
= 765 N. Ref. [
23] describes a similar effect for the behavior of scooter tires. Ref. [
24] describes an opposite behavior for high-performance motorcycle tires, but refers to the dependence on the construction of the tire if this effect is observed.





 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}