

Multi-Objective Parametric Optimization Design for Mirrors Combined with Non-Dominated Sorting Genetic Algorithm
Abstract
:1. Introduction
2. Optimization Method
2.1. Optimization Implemention
- Determine the optimization parameters, constraints and objective functions for the optimization problem;
- Generate the modelling file by using the recording macro file function of Abaqus or scripting the file directly to model the structure, divide the mesh, define the material properties, determine the cell type, establish the analysis step, apply the load and boundary conditions, and submit the computation process;
- Write codes for extracting the required data from the results database of Abaqus and then input these codes following up those in the above modelling file. Up to this point, the modelling file may complete the whole process of simulating the deformation for the mirror model with the determined structural parameters;
- Run the modelling file in Abaqus and save the results;
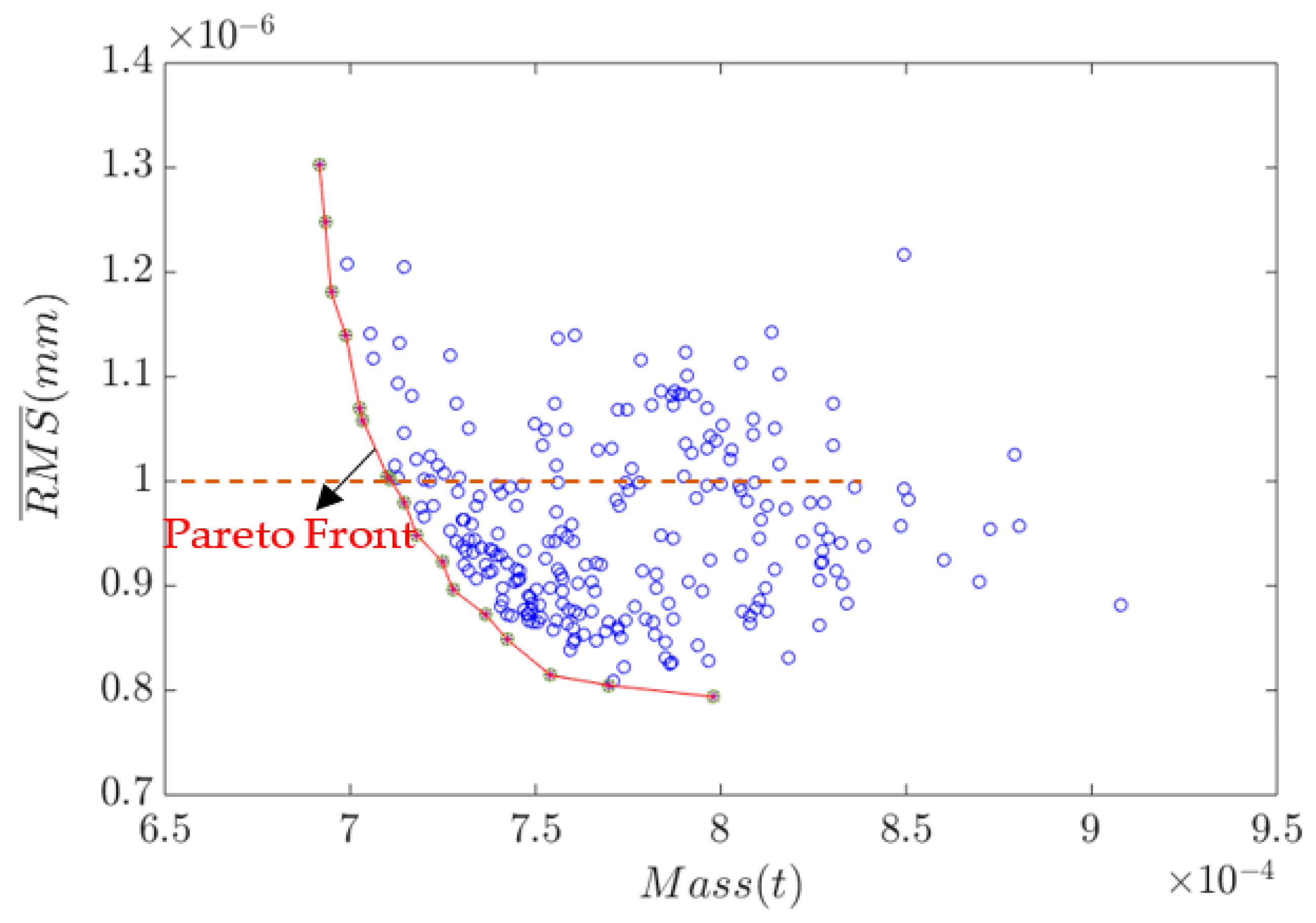
- Input the results into the objective function to calculate the objective values for population classification. According to the non-dominated sorting method, the Pareto optimal individuals are then selected for this generation;
- Retain the optimal individuals and input them into the next generation population. Meanwhile, perform the crossover and mutation operations on the old population to obtain the new generation population;
- By converting binary values to decimal values, the new optimization parameters are generated based on the new population. Then, rewrite the modelling file in Python codes to assign the new optimization parameters of the structure;
- Repeat steps (iv)–(vii) until the number of generations is satisfied;
- Output the overall Pareto optimal solution set and pick the multi-objective optimal solution according to the demand.
2.2. Non-Dominated Sorting Genetic Algorithm
- dominates if and only if for , ;
- weakly dominates if and only if for , and there exists such that ;
- and do not dominate each other if and only if for , and also such that .
2.3. Rigid-Body Motion and Surface Shape Error of a Mirror
3. Mirror Optimization Design
3.1. Fundamental Structure of a Mirror
3.2. Optimization Problem Construction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mirror Material Properties | |
|---|---|
| Components | Value |
| Density | |
| Young’s Modulus | 70 Gpa |
| Poisson’s Ratio | 0.27 |
| NSGA parameters | |
| Population size | 20 |
| Mutation probability | 0.15 |
| Cross probability | 0.8 |
| Number of iterations | 35 |
| Structural parameter constraints | |
| [] | |
| [] | |
3.3. Optimization Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bao, Q.W. Lightweight and Optimization Design and Research for the Opto-Mechanical Structure of Off-Axis Space Camera. Master’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2016; p. 16. [Google Scholar]
- Liu, G.; Guo, L.; Wang, X.; Wu, Q. Topology and parametric optimization based lightweight design of a space reflective mirror. Opt. Eng. 2018, 57, 075101. [Google Scholar] [CrossRef]
- Jiang, C.; Miao, L.; Bao, Q.; Xie, Z.; Tan, Y.; Peng, Q.; Tan, Y. Optimized design of mirror support structure to reduce surface sensitivity. Opt. Eng. 2020, 11, 59. [Google Scholar] [CrossRef]
- Yang, J.W.; Huang, Q.L.; Han, Y.M. Application and Simulation in Fitting Optical Surface with Zernike Polynomial. Spacecr. Recovery Remote Sens. 2010, 31, 49–55. [Google Scholar]
- Wu, Q.W. Treating with surface figure error of mirror/lens by means of Surface equation. Opt. Precis. Eng. 1998, 6, 56–60. [Google Scholar]
- Zhang, C.; Li, Z. A Review of Lightweight Design for Space Mirror Core Structure: Tradition and Future. Machines 2022, 10, 1066. [Google Scholar] [CrossRef]
- Park, K.; Chang, S.; Youn, S. Topology optimization of the primary mirror of a multi-spectral camera. Struct. Multidiscip. Optim. 2003, 25, 46–53. [Google Scholar] [CrossRef]
- Sahu, R.; Patel, V.; Singh, S.K.; Munjal, B.S. Structural optimization of a space mirror to selectively constrain optical aberrations. Struct. Multidiscip. Optim. 2017, 55, 2353–2363. [Google Scholar] [CrossRef]
- Qu, Y.; Jiang, Y.; Feng, L.; Li, X.; Liu, B.; Wang, W. Lightweight Design of Multi-objective Topology for a Large-Aperture Space Mirror. Appl. Sci. 2018, 8, 2259. [Google Scholar] [CrossRef] [Green Version]
- Srinivas, N.; Deb, K. Multiobjective Function Optimization Using Nondominated Sorting Genetic Algorithms. Evol. Comput. 1994, 2, 1301–1308. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley and Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Elarbi, M.; Bechikh, S.; Gupta, A.; BenSaid, L.; Ong, Y.S. A New Decomposition-Based NSGA-II for Many-Objective Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1191–1210. [Google Scholar] [CrossRef]
- Jian, H.; Xu, Y.; Chen, W.; Rang, T.; Tao, Z. An Improved NSGA-II Algorithm Based on Adaptive Weighting and Searching Strategy. Appl. Sci. 2022, 12, 11573. [Google Scholar]
- Xie, W.Z.; Li, Y.L.; Yang, S.Y. A Hybrid Multi-Objective Optimization Method and Its Application to Electromagnetic Device Designs. Appl. Sci. 2022, 12, 12110. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems with Box Constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Granata, V.; Pierro, V.; Troiano, L. Meta-Heuristics Optimization of Mirrors for Gravitational Wave Detectors: Cryogenic Case. Appl. Sci. 2022, 12, 7680. [Google Scholar] [CrossRef]
- Dhanalakshmi, S.; Kannan, S.; Mahadevan, K.; Baskar, S. Application of modified NSGA-II algorithm to combined economic and emission dispatch problem. Int. J. Electr. Power Energy Syst. 2011, 33, 992–1002. [Google Scholar] [CrossRef]
- Baklouti, A.; Dammak, K.; Hami, A.E. Optimum reliable design of rolling element bearings using multi-objective optimization based on C-NSGA-II. Reliab. Eng. Syst. Saf. 2022, 223, 108508. [Google Scholar] [CrossRef]
- Zangooei, M.H.; Habibi, J.; Alizadehsani, R. Disease Diagnosis with a hybrid method SVR using NSGA-II. Neurocomputing 2014, 136, 14–29. [Google Scholar] [CrossRef]
- Kurita, M.; Ohmori, H.; Kunda, M.; Kawamura, H.; Noda, N.; Seki, T.; Nishimura, Y.; Yoshida, M.; Sato, S.; Nagata, T. Light-weight telescope structure optimized by genetic algorithms. Proc. SPIE 2010, 7733, 54–58. [Google Scholar]
- Kihm, H.; Yang, H.S.; Moon, I.K.; Yeon, J.H.; Lee, S.H.; Lee, Y.W. Adjustable bipod flexures for mounting mirrors in a space telescope. Appl. Opt. 2012, 51, 76–83. [Google Scholar] [CrossRef] [PubMed]
- Kihm, H.; Yang, H. Design optimization of a 1-m lightweight mirror for a space telescope. Opt. Eng. 2013, 52, 091806. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Qi, L. Bayesian Regularization Algorithm Based Recurrent Neural Network Method and NSGA-II for the Optimal Design of the Reflector. Machines 2022, 10, 63. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, Z.; Zhao, H.J.; Zou, B.Y. Rigid-body displacement separation of optics in optical-structural-thermal integrated analysis. Infrared Laser Eng. 2012, 41, 276. [Google Scholar]
- Zhang, J.Q.; Dong, D.Y.; Wu, Q.W.; Yan, C.X.; Zhang, X.J. Treatment of surface figure error and rigid body motion for mirror/lens in optical remote sensor. Chin. J. Sci. Instrum. 2011, 32, 242–247. [Google Scholar]
- Doyle, K.B.; Genberg, V.L.; Michels, G.J. Chapter 4: Optical surface error. In Integrated Optomechanical Analysis, 2nd ed.; National Defense Industry Press: Beijing, China, 2015; pp. 67–76. [Google Scholar]
- Tan, S.L.; Wang, L.J.; Zhang, X.; Zhang, J.Z.; Xie, X.L. Snap Together Design and Analysis of Visible Quality Aluminum Mirror. J. Chang. Univ. Sci. Technol. 2017, 40, 5–12. [Google Scholar]
- Zhang, J.Z.; Zhang, X.; Tan, S.L.; Xie, X.L. Design and Manufacture of an Off-axis Aluminum Mirror for Visible-light Imaging. Curr. Opt. Photonics 2017, 1, 364–371. [Google Scholar]
- Wu, J.F. Design of High-lightweight Space Mirror Component Based on Automatic Optimization. J. Phys. Conf. Ser. 2020, 1605, 012023. [Google Scholar] [CrossRef]







| Components | Value |
|---|---|
| 64.4 mm | |
| 46 mm | |
| 13 mm | |
| 21.6 mm | |
| mm | |
| mm | |
| mm | |
| mm | |
| Mirror Mass | 717.9 g |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Zhang, B.; Wang, P.; Gan, Z.; Han, P.; Wang, Y. Multi-Objective Parametric Optimization Design for Mirrors Combined with Non-Dominated Sorting Genetic Algorithm. Appl. Sci. 2023, 13, 3346. https://doi.org/10.3390/app13053346
Sun L, Zhang B, Wang P, Gan Z, Han P, Wang Y. Multi-Objective Parametric Optimization Design for Mirrors Combined with Non-Dominated Sorting Genetic Algorithm. Applied Sciences. 2023; 13(5):3346. https://doi.org/10.3390/app13053346
Chicago/Turabian StyleSun, Lu, Bao Zhang, Ping Wang, Zhihong Gan, Pengpeng Han, and Yijian Wang. 2023. "Multi-Objective Parametric Optimization Design for Mirrors Combined with Non-Dominated Sorting Genetic Algorithm" Applied Sciences 13, no. 5: 3346. https://doi.org/10.3390/app13053346
APA StyleSun, L., Zhang, B., Wang, P., Gan, Z., Han, P., & Wang, Y. (2023). Multi-Objective Parametric Optimization Design for Mirrors Combined with Non-Dominated Sorting Genetic Algorithm. Applied Sciences, 13(5), 3346. https://doi.org/10.3390/app13053346