
An Image Processing Method for Measuring the Surface Area of Rapeseed Pods


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Materials and Equipment
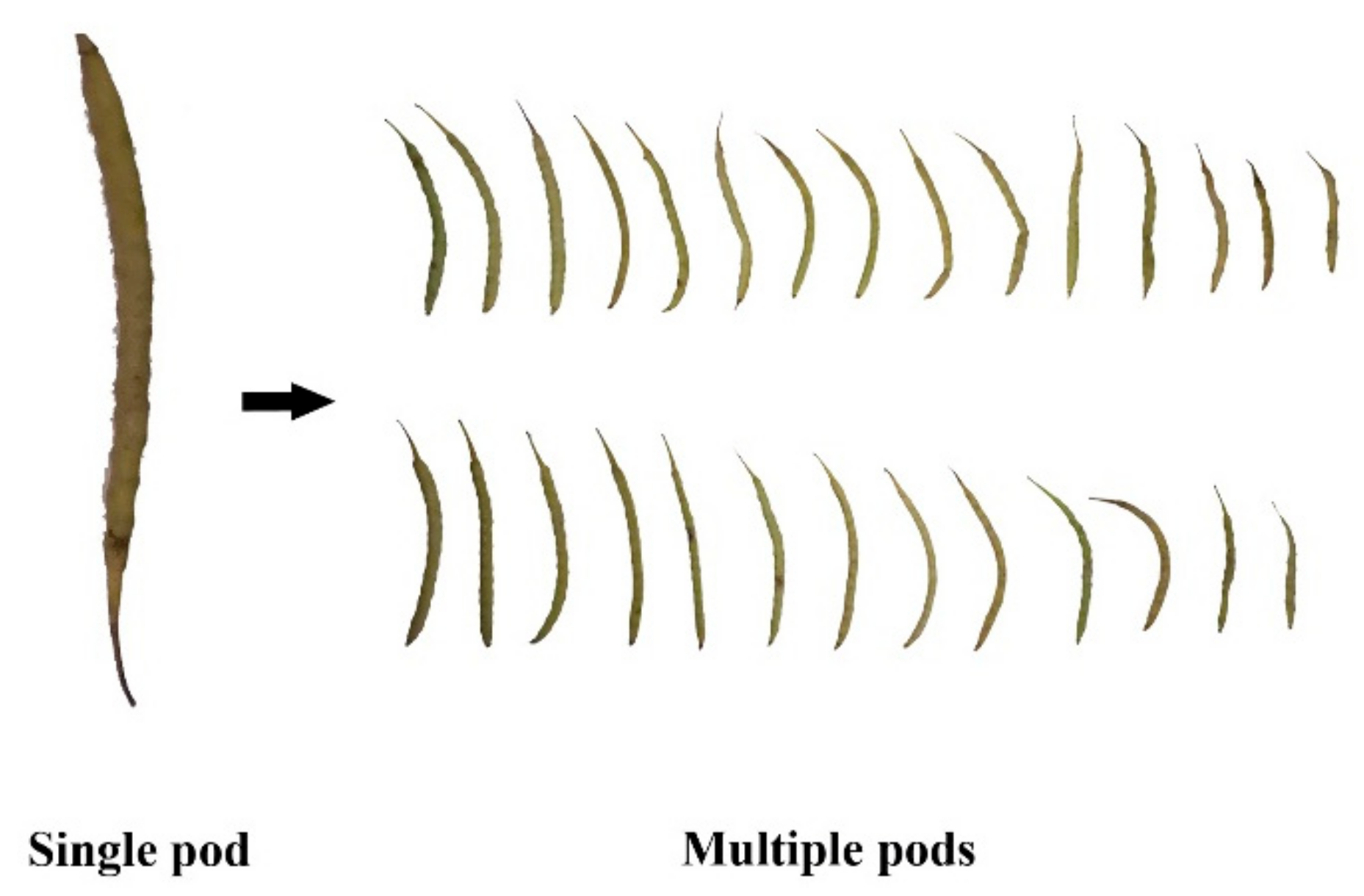
2.1.1. Materials
2.1.2. Equipment and Software
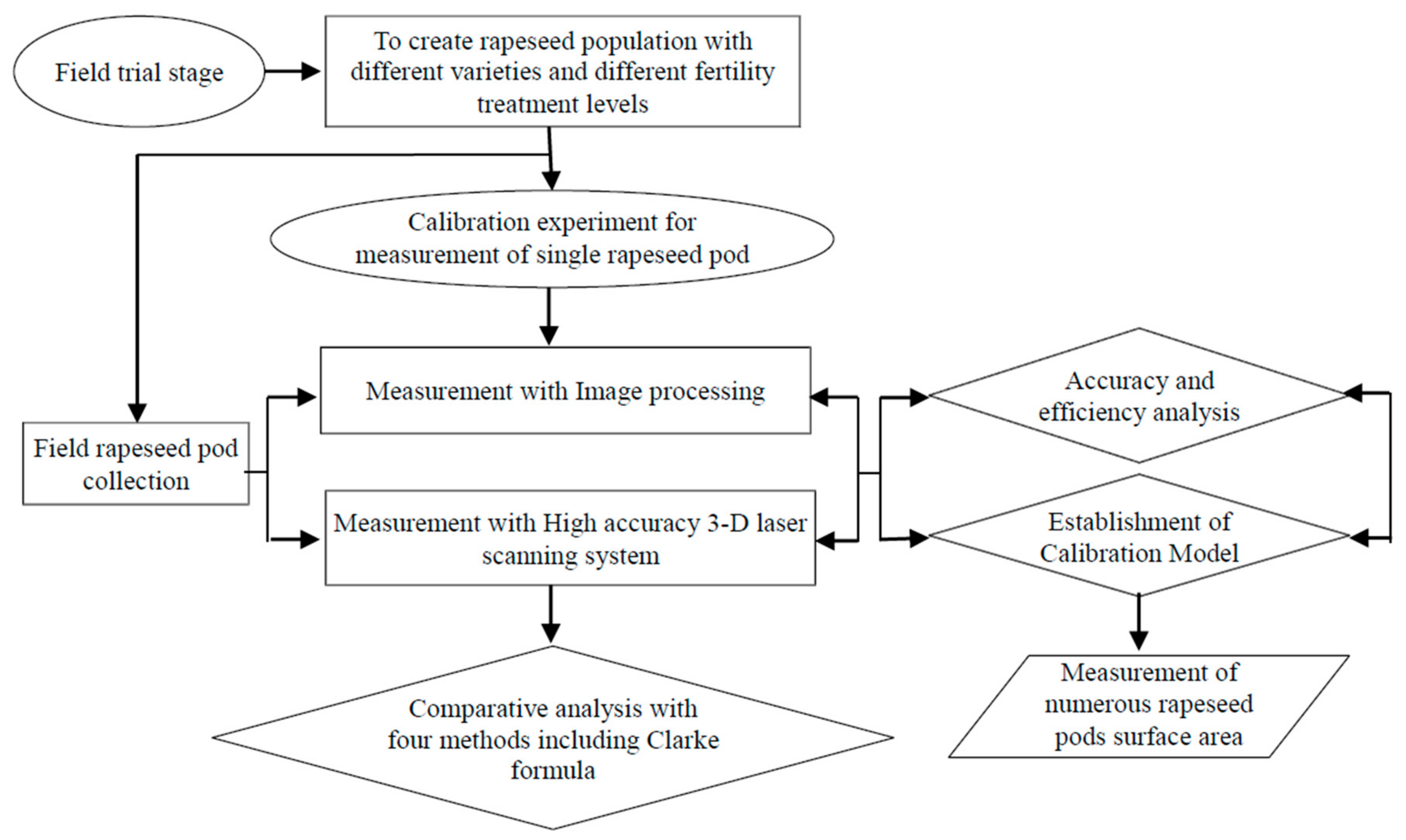
2.2. Measurement Method and Technical Roadmap
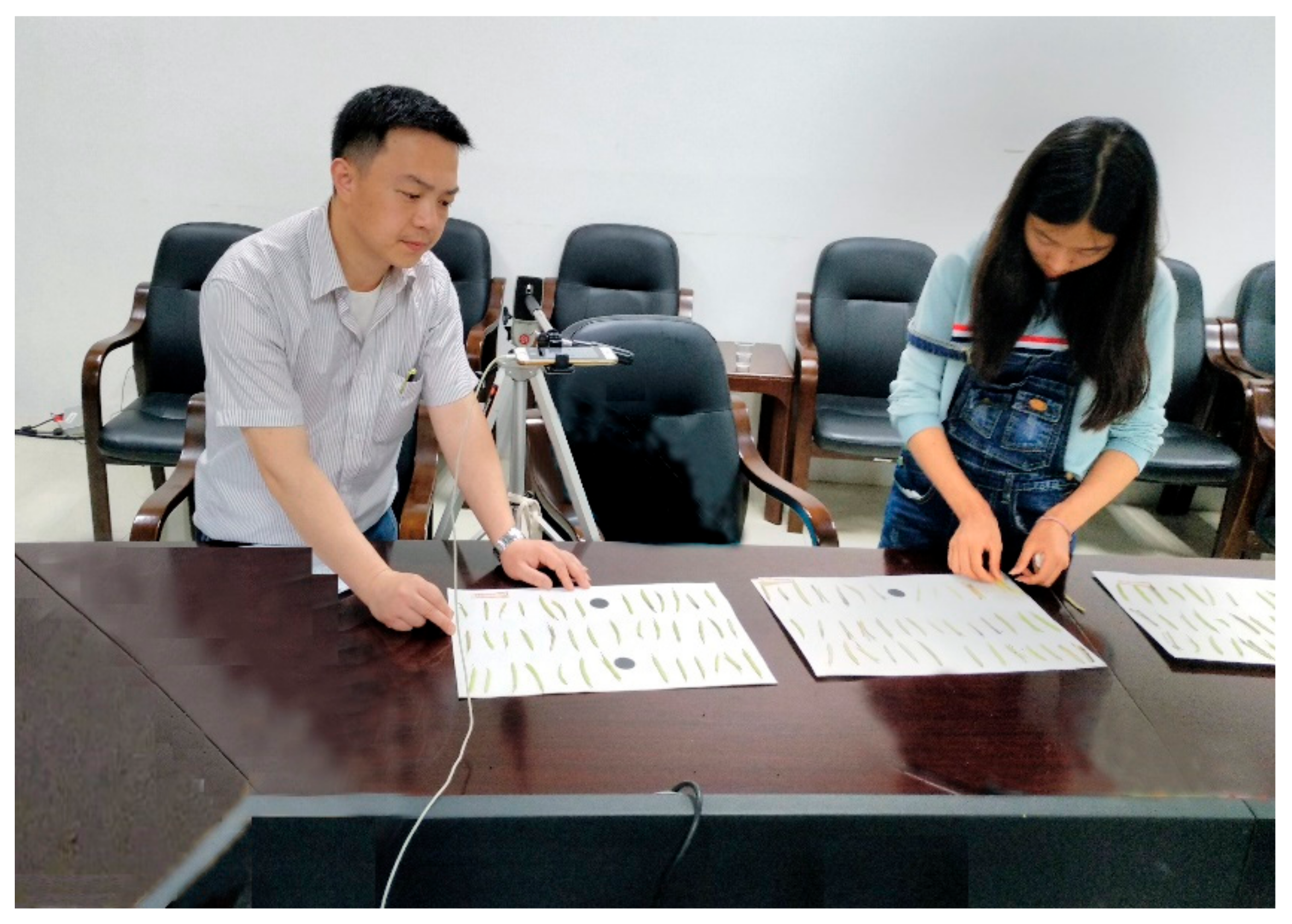
2.3. Measurement Principle and Operation
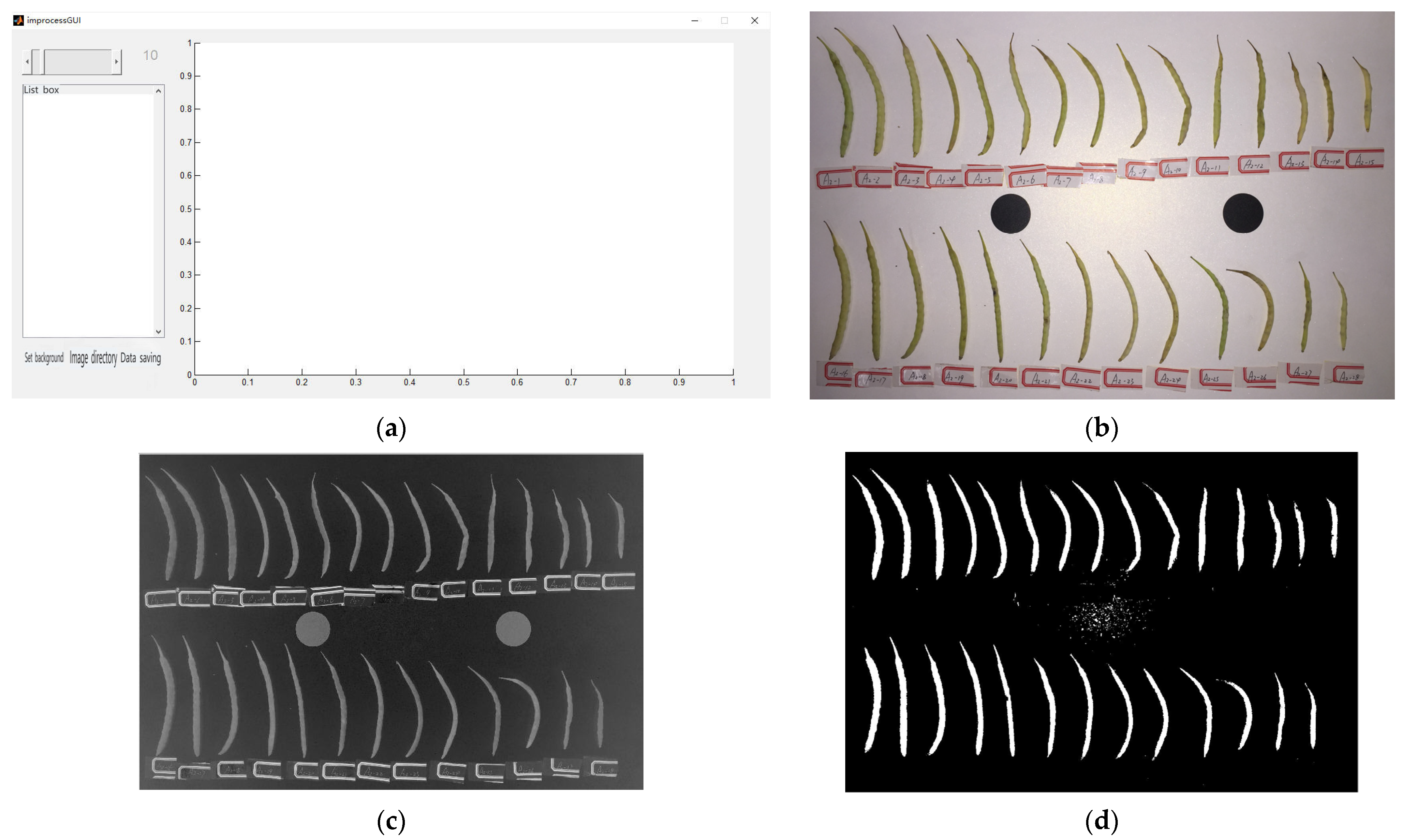
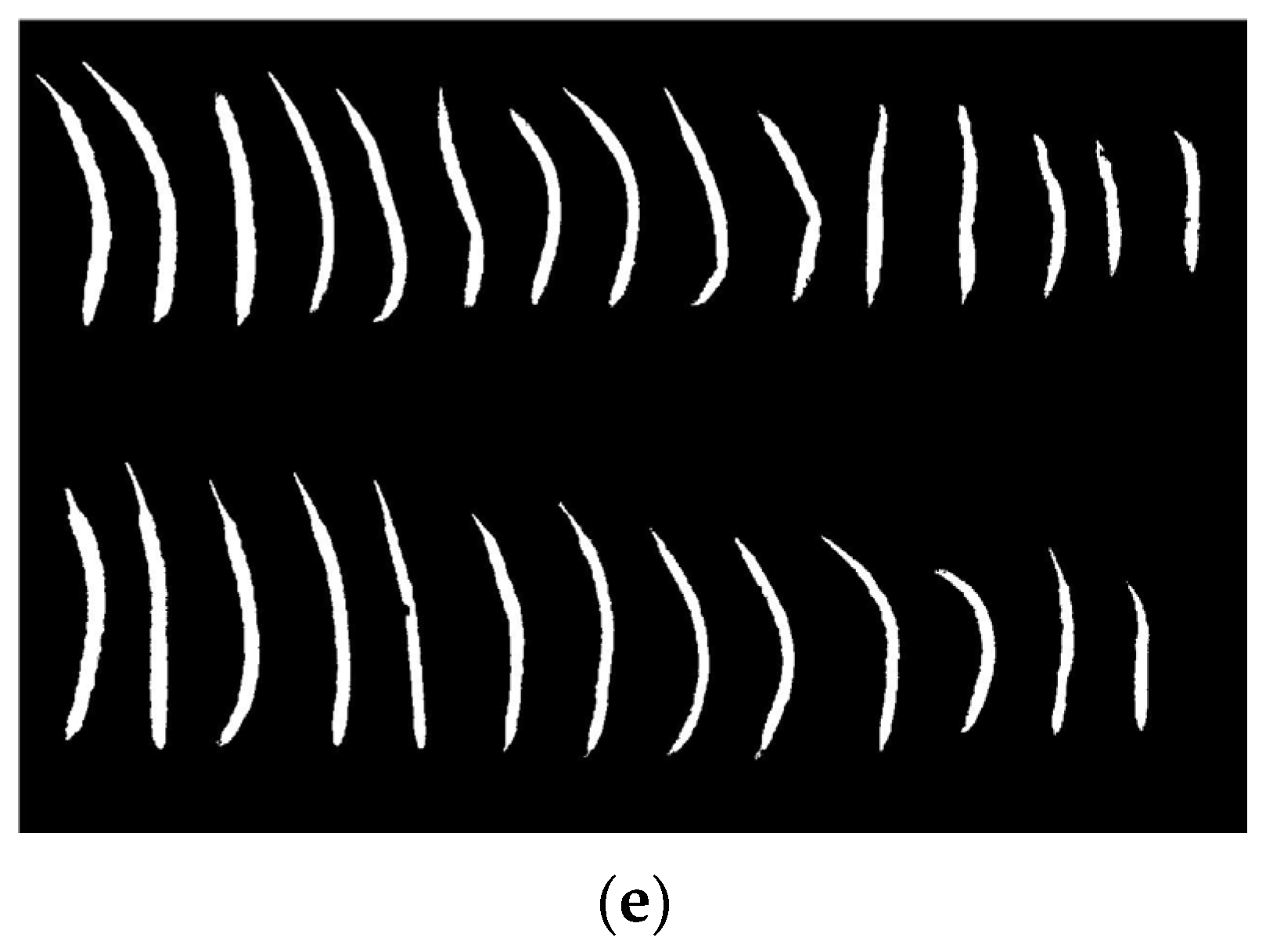
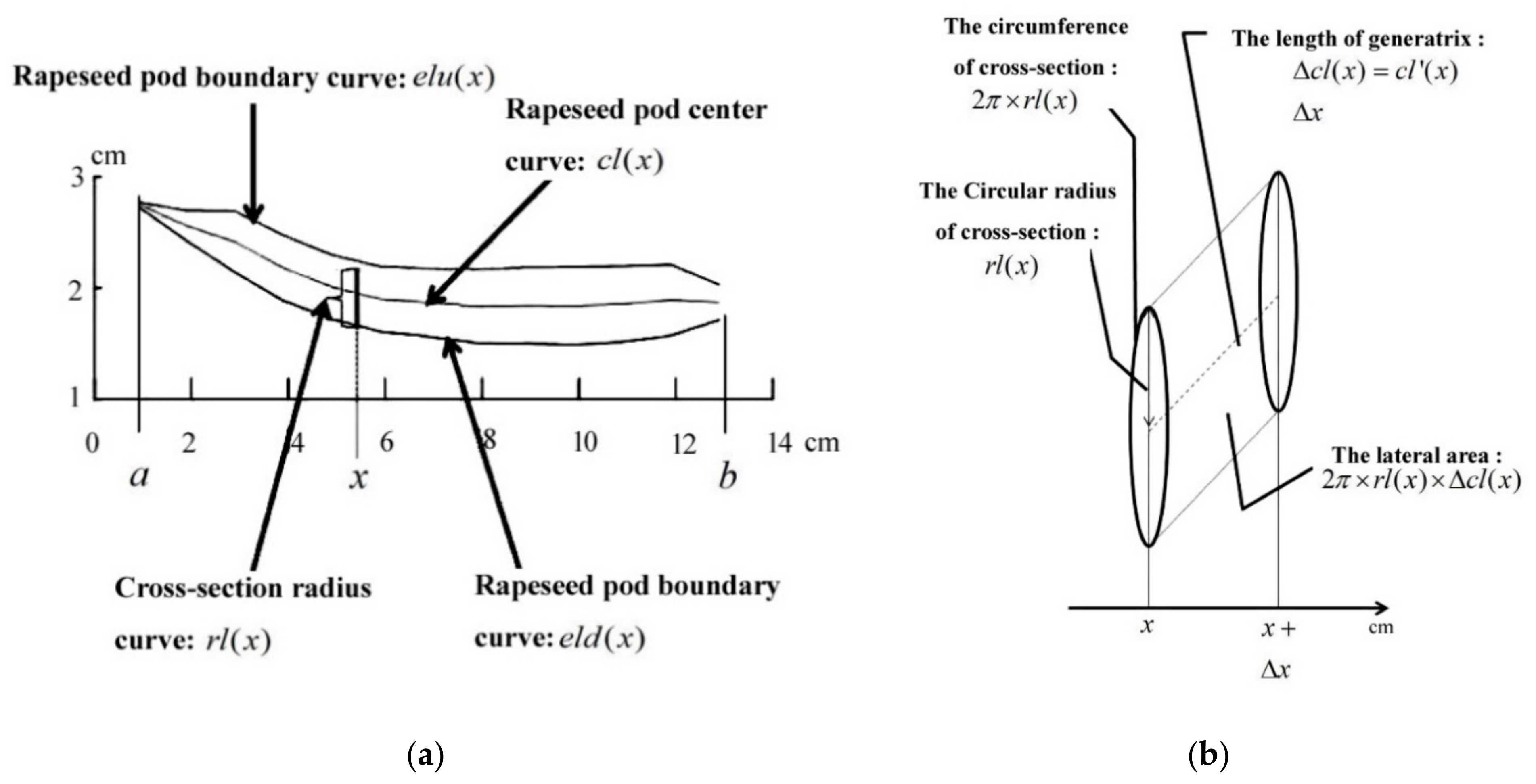
2.3.1. Image Processing Method
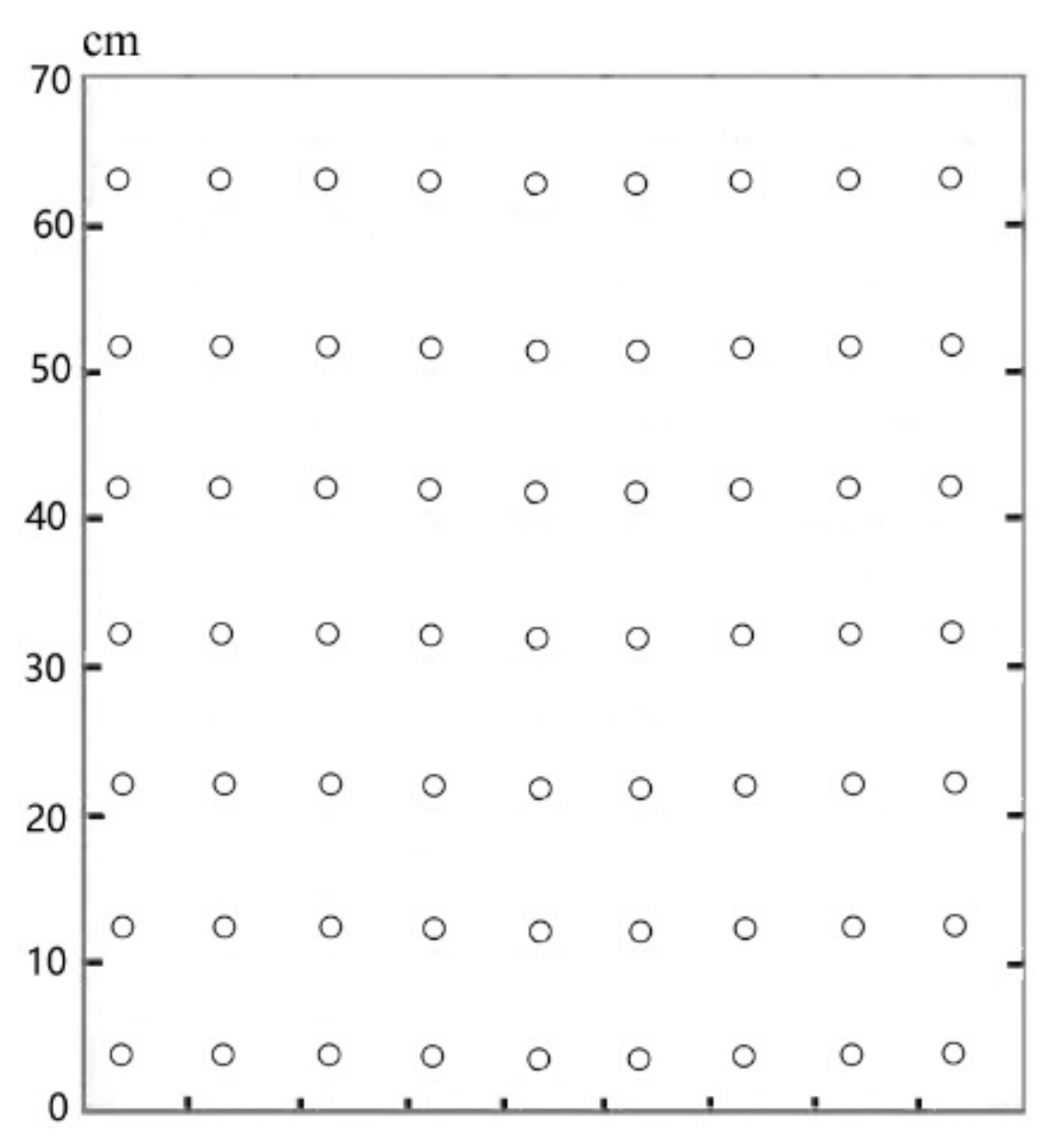
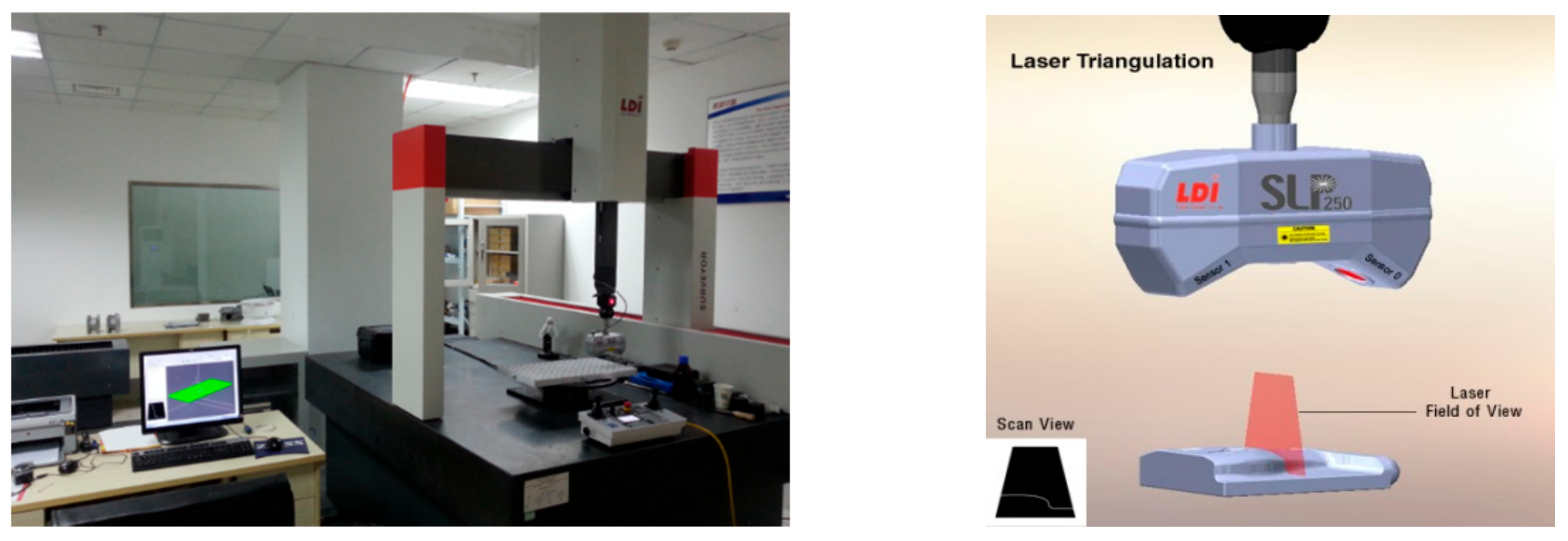
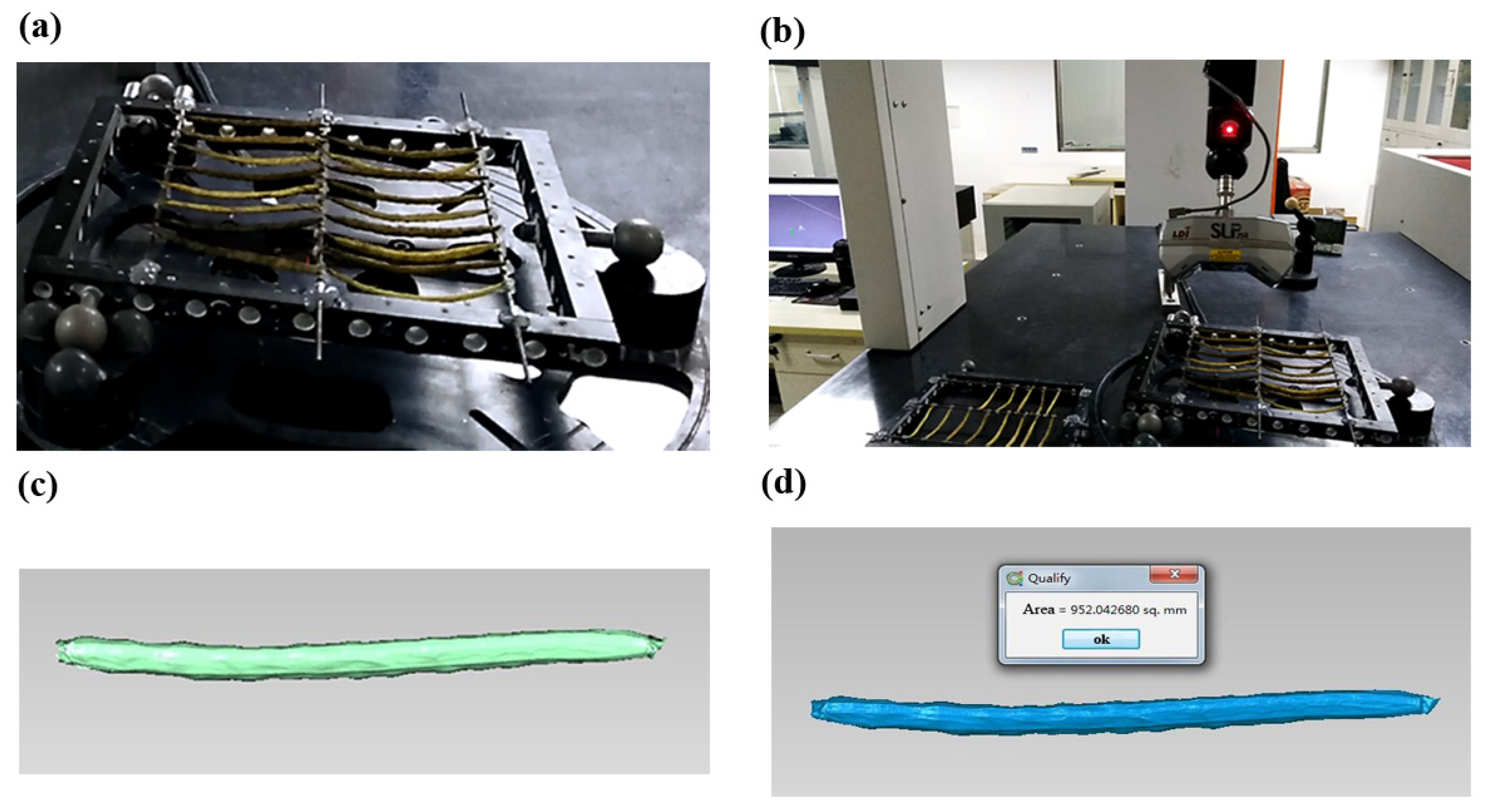
2.3.2. High-Precision 3-D Laser Scanner Measurement Method
2.3.3. The Other Four Measurement Methods Used for Comparison
3. Results and Analysis
3.1. Analysis of the Accuracy of Measurement
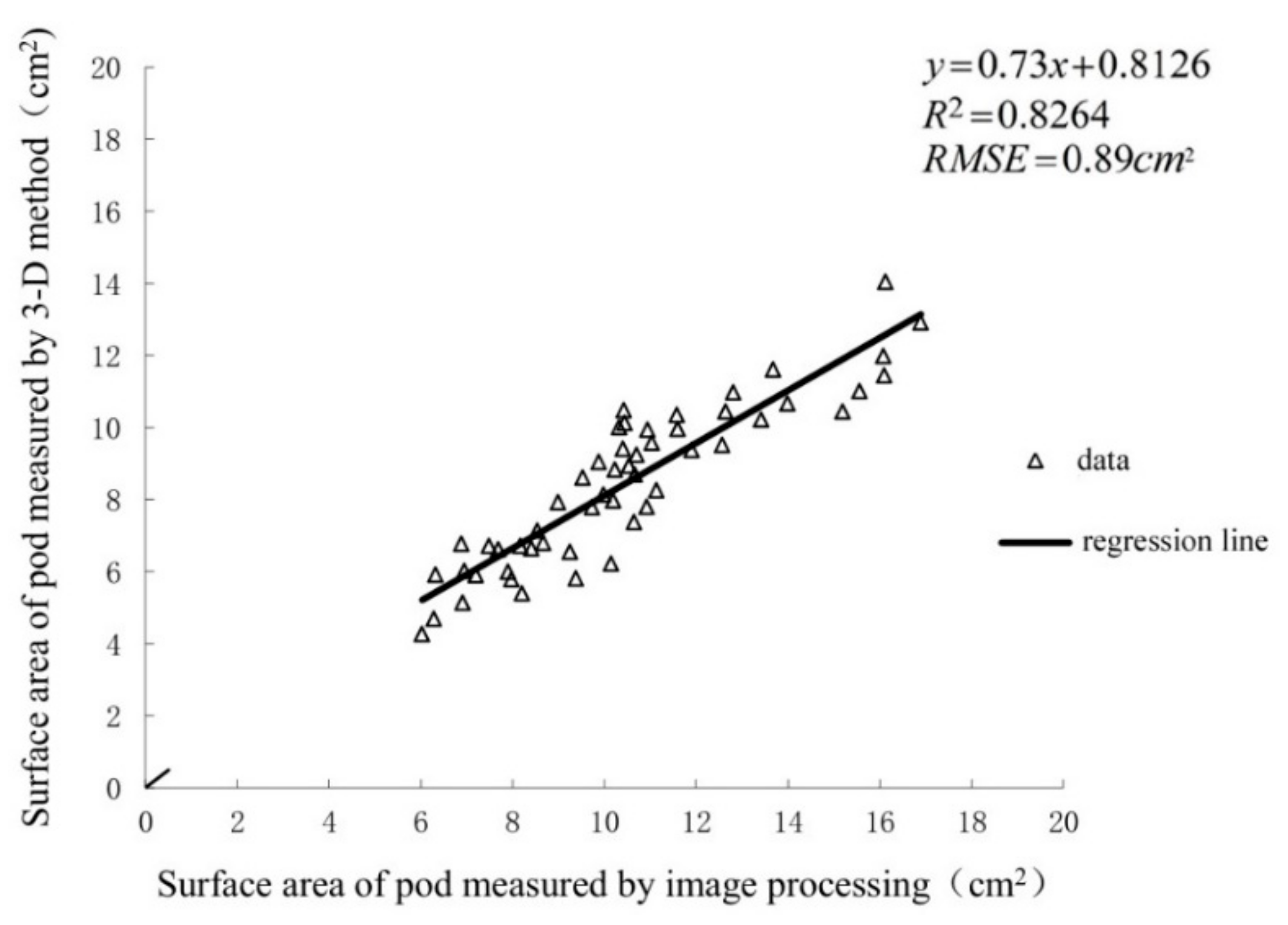
3.1.1. Comparison of the Measurement Results between the Image Processing and 3-D Methods
3.1.2. Comparison of the Results of the Other Four Measurement Methods with the 3-D Method
3.1.3. Comparison of the Results of Measurement Obtained by the Image Processing Method with Those of the Other Four Methods of Measurement
3.2. Analysis of Measurement Efficiency
3.3. Analysis of the Results of Measurement for Multiple Pod Surface Areas
4. Discussion
4.1. 3-D Measurement Method and a Comparison of Image Processing Methods
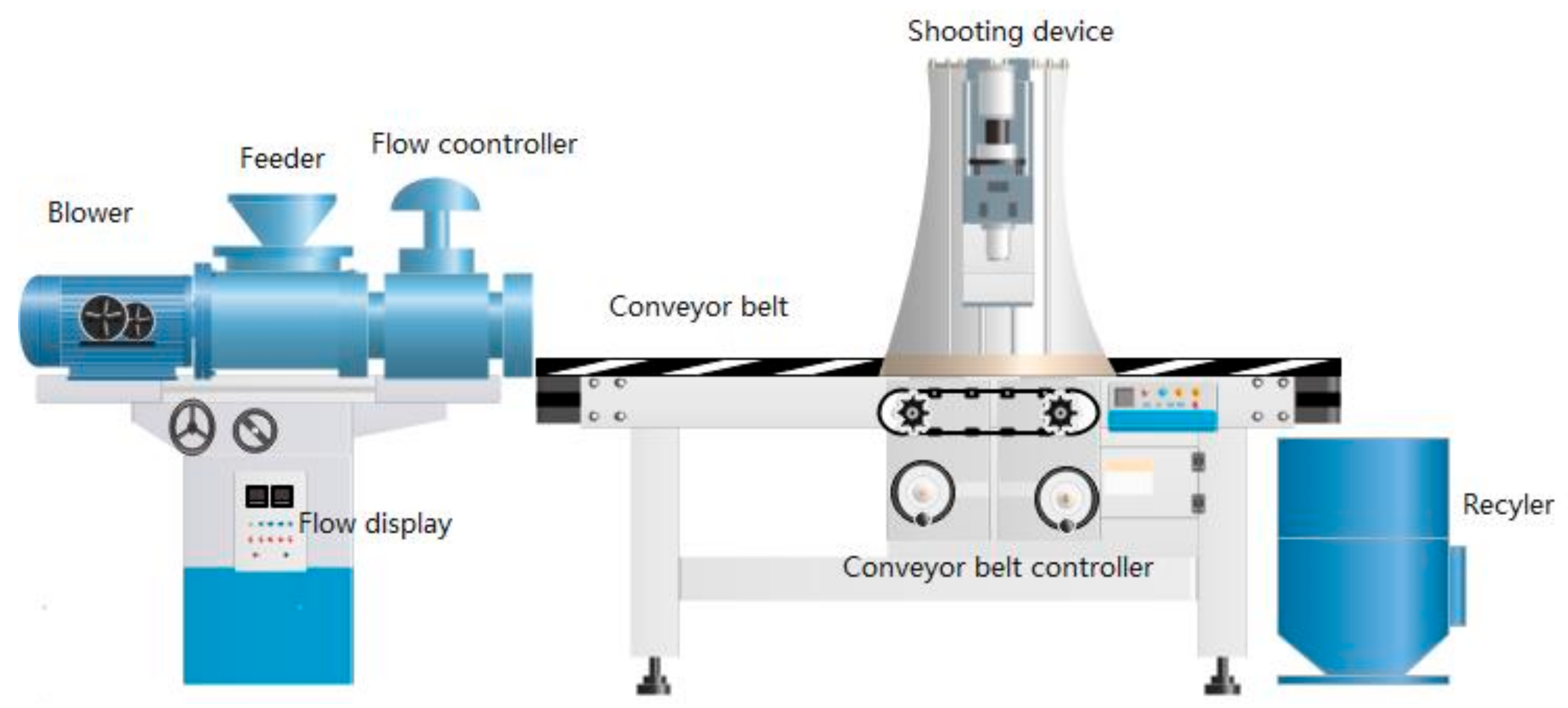
4.2. The Application of Image Processing Technology in a Future Rapeseed Pod Testing Machine
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guan, C.Y. Fruiting Organs and Yield Formation in Rapeseed; Science Press: Beijing, China, 2017. [Google Scholar]
- Ling, Q.H. Crop Population Quality; Shanghai Scientific & Technical Publishers: Shanghai, China, 2000. [Google Scholar]
- Leng, S.H.; Tang, Y.; Li, Q.L.; Zuo, Q.S.; Yang, P. Studies on source and sink of rapeseed Ⅰ. Regulation of pod size on source and sink in rapeseed after flowering. Chin. J. Oil Crop Sci. 2005, 27, 37–40. [Google Scholar]
- Guan, C.Y. Physiological Ecology and Modern Cultivation Techniques of High-Quality Rapeseed; China Agriculture Press: Beijing, China, 2013. [Google Scholar]
- Inanaga, S.; Kumura, N.; Murata, Y. Research on material production on rapeseed- characteristics of photosynthesis and material production in pod layer. Chin. J. Oil Crop Sci. 1981, 3, 84–87. [Google Scholar]
- Inanaga, S.; Kumura, N.; Murata, Y. Research on material production on rapeseed-photosynthesis, respiration and carbon metabolism of pod. Chin. J. Oil Crop Sci. 1981, 3, 74–78, 81. [Google Scholar]
- Chen, T. Influence of Leaf and Silique Photosynthesis on Seeds Yield and Seed Soil Quality of Oilseed Rape; Northwest A&F University: Yangling, China, 2016. [Google Scholar]
- Li, N.; Song, D.J.; Peng, W.; Zhan, J.P.; Shi, J.Q.; Wang, X.F.; Liu, G.H.; Wang, H.Z. Maternal control of seed weight in rapeseed (Brassica napus L.): The causal link between the size of pod (mother, source) and seed (offspring, sink). Plant Biotechnol. J. 2019, 17, 736–749. [Google Scholar] [CrossRef]
- Leng, S.H.; Zhu, G.R. Calculation Method of Rapeseed pod Surface Area. Chin. J. Oil Crop Sci. 1991, 13, 76–77. [Google Scholar]
- Liu, H.L. Cultivation of Rape; Shanghai Scientific & Technical Publishers: Shanghai, China, 1987. [Google Scholar]
- Wang, H.X. Effects of Seeding Quantity and Fertilizer Treatments on the Structural Characters of Rape Silique Layer. J. Anhui Agric. Sci. 2017, 45, 33–36. [Google Scholar]
- Liu, R.F.; Huang, S.Y.; Nie, Y.P.; Xu, S.Y. Automated detection research for number and key phenotypic parameters of rapeseed silique. Chin. J. Oil Crop Sci. 2020, 42, 71–77. [Google Scholar]
- Wang, C.L.; Hai, J.B.; Yang, J.L.; Tian, J.H.; Chen, W.J.; Chen, T.; Luo, H.B.; Wang, H. Influence of leaf and silique photosynthesis on seeds yield and seeds oil quality of oilseed rape (Brassica napus L.). Eur. J. Agron. 2016, 74, 112–118. [Google Scholar] [CrossRef]
- Chen, X.C.; Wang, H.H.; Gu, Z.Q. Study on the Measurement of Rape Pod Surface Area. J. Hubei Agric. Coll. 2004, 24, 170–173. [Google Scholar]
- Zhang, Y.W.; Wang, Z.Y.; Li, D.R.; Zhang, X.; Chen, W.J.; Tian, J.H. Study on Diurnal Changes of Photosynthetic Characteristics in Pods of Brassica napus. Acta Agric. Boreali-Occident. Sin. 2008, 17, 174–180. [Google Scholar]
- Leng, S.H.; Yang, G.; Chen, X.L.; Chen, W.D.; Ye, J.A. Effects of N application on pod characteristics among different layer of pod canopy in Ningza No. 1 (Brassica napus L.). Chin. J. Oil Crop Sci. 2002, 24, 25–28. [Google Scholar]
- Gao, J.Q.; Pu, H.M.; Long, W.H.; Chen, X.J. Changes in dry matter and oil accumulation during pod development of rapeseed. Jiangsu Agric. Sci. 2007, 35, 50–52. [Google Scholar]
- Ding, X.Q. Study on characters of silique and seed in spring rape (B. campestris L.). Chin. J. Oil Crop Sci. 1996, 18, 28–30. [Google Scholar]
- Bai, Y.Z. The research for the growing course of three kinds rapeseed and rapefruit. J. Xinjiang Norm. Univ. (Nat. Sci. Ed.) 1993, 12, 54–57. [Google Scholar]
- Pu, H.M.; Qi, C.K.; Fu, S.Z. The growth characteristics and source-sink effect of pods in rapeseed. Jiangsu Agric. Sci. 1993, 21, 22–25. [Google Scholar]
- Zhao, H.; Sun, C.C. Study on the Relationship between the morphological differences of pod and seeds in Brassica napus. Shanghai Agric. Sci. Technol. 1990, 20, 17–19. [Google Scholar]
- Wang, C.L.; Wang, Z.L.; Chen, T.; Yang, J.L.; Chen, W.J.; Mu, J.X.; Tian, J.H.; Zhao, X.G. Relationship between Yield and Photosynthesis of Leaf and Silique of Different Brassica napus L. Varieties during Reproduction Period. Acta Bot. Boreali-Occident. Sin. 2016, 36, 1417–1426. [Google Scholar]
- Li, C.F.; Wang, C.F. Effects of nitrogen nutrition on pods development in rape (B. napus). Acta Agron. Sin. 1988, 14, 329–335. [Google Scholar]
- Mao, F.R.; Wang, L. Measurement Technology of 3D Laser Scanning. J. Astronaut. Metrol. Meas. 2005, 25, 1–6. [Google Scholar]
- Tong, S.; Xu, X.G.; Yi, C.T.; Shao, C.Y. Overview on vision-based 3D reconstruction. Appl. Res. Comput. 2011, 28, 2411–2417. [Google Scholar]
- Yang, B.S.; Liang, F.S.; Huang, R.G. Progress, Challenges and Perspectives of 3D LiDAR Point Cloud Processing. Acta Geod. Cartogr. Sin. 2017, 46, 1509–1516. [Google Scholar]
- Sun, Y.C.; Ge, B.Z.; Zhang, Y.M. Review for the 3D Information Measuring Technology. J. Optoelectron.·Laser 2004, 15, 248–254. [Google Scholar]
- Nguyen, H.; Nguyen, D.; Wang, Z.Y.; Kieu, H.; Le, M. Real-time, high-accuracy 3D imaging and shape measurement. Appl. Opt. 2015, 54, A9–A17. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.G. Classification and Application of Terrestrial Laser Scanners. Geospat. Inf. 2005, 3, 60–62. [Google Scholar]
- Rantung, J.; Oh, J.M.; Kim, H.K.; Oh, S.J.; Kim, S.B. Real-Time Image Segmentation and Determination of 3D Coordinates for Fish Surface Area and Volume Measurement based on Stereo Vision. J. Inst. Control. Robot. Syst. 2018, 24, 141–148. [Google Scholar] [CrossRef]
- Reichert, J.; Schellenberg, J.; Schubert, P.; Wilke, T. 3D scanning as a highly precise, reproducible, and minimally invasive method for surface area and volume measurements of scleractinian corals. Limnol. Oceanogr.-Methods 2016, 14, 518–526. [Google Scholar] [CrossRef]
- Sholts, S.B.; Warmlander, S.K.T.S.; Flores, L.M.; Miller, K.W.P.; Walker, P.L. Variation in the Measurement of Cranial Volume and Surface Area Using 3D Laser Scanning Technology. J. Forensic Sci. 2010, 55, 871–876. [Google Scholar] [CrossRef]
- Telfer, S.; Woodburn, J. The use of 3D surface scanning for the measurement and assessment of the human foot. J. Foot Ankle Res. 2010, 3, 19. [Google Scholar] [CrossRef]
- Lee, H.Y.; Hong, K.; Kim, E.A. Measurement protocol of women’s nude breasts using a 3D scanning technique. Appl. Ergon. 2004, 35, 353–359. [Google Scholar] [CrossRef]
- Villordon, A.; Gregorie, J.C.; LaBonte, D. Direct Measurement of Sweetpotato Surface Area and Volume Using a Low-cost 3D Scanner for Identification of Shape Features Related to Processing Product Recovery. Hortscience 2020, 55, 722–728. [Google Scholar] [CrossRef]
- Villordon, A.Q.; LaBonte, D. Using a Low-cost 3D Scanner for Non-destructive Measurement of Surface Area and Volume of Storage Roots in Postharvest Research. Hortscience 2017, 52, S65. [Google Scholar]
- SGKS. LDI Ultra-High Precision 3D Laser Scanning Measurement System. 2022. Available online: http://www.sgkslabs.com/resources-v.asp?id=2 (accessed on 20 August 2022).
- Li, X.M.; Deng, Y.P.; Wang, X.H.; Li, F.Y.; Guan, C.Y. A New Method for Rapid Estimation of Rapeseed Pod Surface Area. China CN201911170476, 21 February 2020. [Google Scholar]
- Tang, Q.Y.; Zhang, C.X. Data Processing System (DPS) software with experimental design, statistical analysis and data mining developed for use in entomological research. Insect Sci. 2013, 20, 254–260. [Google Scholar] [CrossRef]
- James, S. Calculus; World Publishing Corporation: Beijing, China, 2004. [Google Scholar]
- Li, X.M.; Wang, X.H.; Wei, H.L.; Zhu, X.G.; Peng, Y.L.; Li, M.; Li, T.; Huang, H. A technique system for the measurement, reconstruction and character extraction of rice plant architecture. PLoS ONE 2017, 12, e0177205. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Chen, J.H.; Shang, W.Y. Study on the processes of the development of pods and seeds in Brassica napus L. Chin. J. Oil Crop Sci. 1988, 10, 23–26. [Google Scholar]
- Leng, S.H.; Hui, F.H.; Zuo, Q.S.; Tang, Y. Regulations of N application on pod qualities of different branches in rapeseed. Chin. J. Oil Crop Sci. 2003, 25, 60–63. [Google Scholar]
- Zhang, Q.F.; Sun, X.S. Measuring Principle and Developmental Prospect of 3D Laser Scanner. Beijing Surv. Mapp. 2011, 25, 39–42. [Google Scholar]
- Duan, L.F.; Yang, W.N. Research advances and futurescenarios of rice phenomics. Chin. Bull. LifeSciences 2016, 28, 1129–1137. [Google Scholar]
- Mu, J.H.; Chen, Y.Z.; Feng, H.; Li, W.J.; Zhou, L.B. A new revolutionin crop breeding: The era of high-throughput phenomics. Plant Sci. J. 2016, 34, 962–971. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | The Model Established with the Modeling Samples | Accuracy Analysis of the Testing Samples | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Number of Samples | The Average Measurement Value of the 3-D Method (cm2) | The Average Measurement Value of the Image Processing Method (cm2) | Correlation Coefficient | Number of Samples | The Average Measurement Value of the 3-D Method (cm2) | The Average Measurement Value of the Image Processing Method (cm2) | Relative Error | RMSE (cm2) | |
| Replicate 1 | 54 | 8.44 | 10.25 | 0.92 ** | 27 | 8.42 | 8.74 | 3.78% | 0.95 |
| Replicate 2 | 54 | 8.46 | 10.47 | 0.91 ** | 27 | 8.39 | 8.25 | 1.67% | 0.89 |
| Replicate 3 | 54 | 8.40 | 10.41 | 0.91 ** | 27 | 8.49 | 8.33 | 1.93% | 0.93 |
| Average | 54 | 8.43 | 10.38 | 0.92 ** | 27 | 8.43 | 8.44 | 2.46% | 0.92 |
| Experiment | Number of Samples | The Average Measurement Value of the 3-D Method (cm2) | Clark Formula Method | Leng Formula Method | Flattening Scanning Method | Quasi-Cylinder Side Area Method | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | |||
| Replicate 1 | 27 | 8.42 | 10.63 | 26.25% | 2.64 | 10.43 | 23.80% | 2.52 | 7.21 | 14.43% | 1.66 | 12.27 | 45.67% | 4.24 |
| Replicate 2 | 27 | 8.39 | 10.08 | 20.15% | 2.12 | 9.85 | 17.44% | 1.99 | 6.78 | 19.10% | 1.78 | 11.63 | 38.63% | 3.61 |
| Replicate 3 | 27 | 8.49 | 10.19 | 19.92% | 2.40 | 9.96 | 17.30% | 2.32 | 7.13 | 16.05% | 1.49 | 11.75 | 38.37% | 3.86 |
| Average | 27 | 8.43 | 10.30 | 22.10% | 2.39 | 10.08 | 19.51% | 2.27 | 7.04 | 16.53% | 1.64 | 11.88 | 40.89% | 3.90 |
| Experiment | Number of Samples | The Average Measurement Value of the 3-D Method (cm2) | Image Processing Method | Clark Formula Method | Flattening Scanning Method | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Correlation Coefficient of Modelling | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | Correlation Coefficient of Modelling | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | Correlation Coefficient of Modelling | The Average Measurement Value (cm2) | Relative Error | RMSE (cm2) | |||
| Replicate 1 | 27 | 8.42 | 0.92 ** | 8.74 | 3.78% | 0.95 | 0.87 ** | 8.78 | 4.21% | 1.09 | 0.96 ** | 8.71 | 3.47% | 1.18 |
| Replicate 2 | 27 | 8.39 | 0.91 ** | 8.25 | 1.67% | 0.89 | 0.85 ** | 8.25 | 1.59% | 1.09 | 0.92 ** | 8.04 | 4.15% | 0.86 |
| Replicate 3 | 27 | 8.49 | 0.91 ** | 8.33 | 1.93% | 0.93 | 0.88 ** | 8.29 | 2.37% | 1.26 | 0.90 ** | 8.54 | 0.59% | 0.58 |
| Average | 27 | 8.43 | 0.92 ** | 8.44 | 2.46% | 0.92 | 0.87 ** | 8.44 | 2.72% | 1.15 | 0.92 ** | 8.43 | 2.74% | 0.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Li, X.; Huang, H.; Xiang, H.; Guan, C.; Guan, M. An Image Processing Method for Measuring the Surface Area of Rapeseed Pods. Appl. Sci. 2023, 13, 5129. https://doi.org/10.3390/app13085129
Li F, Li X, Huang H, Xiang H, Guan C, Guan M. An Image Processing Method for Measuring the Surface Area of Rapeseed Pods. Applied Sciences. 2023; 13(8):5129. https://doi.org/10.3390/app13085129
Chicago/Turabian StyleLi, Fangyi, Xumeng Li, Huang Huang, Hao Xiang, Chunyun Guan, and Mei Guan. 2023. "An Image Processing Method for Measuring the Surface Area of Rapeseed Pods" Applied Sciences 13, no. 8: 5129. https://doi.org/10.3390/app13085129
APA StyleLi, F., Li, X., Huang, H., Xiang, H., Guan, C., & Guan, M. (2023). An Image Processing Method for Measuring the Surface Area of Rapeseed Pods. Applied Sciences, 13(8), 5129. https://doi.org/10.3390/app13085129