

Doppler Factor in the Omega-k Algorithm for Pulsed and Continuous Wave Synthetic Aperture Radar Raw Data Processing
 , , , and
, , , and 
Abstract
:1. Introduction
2. Syntethic Aperture Radar
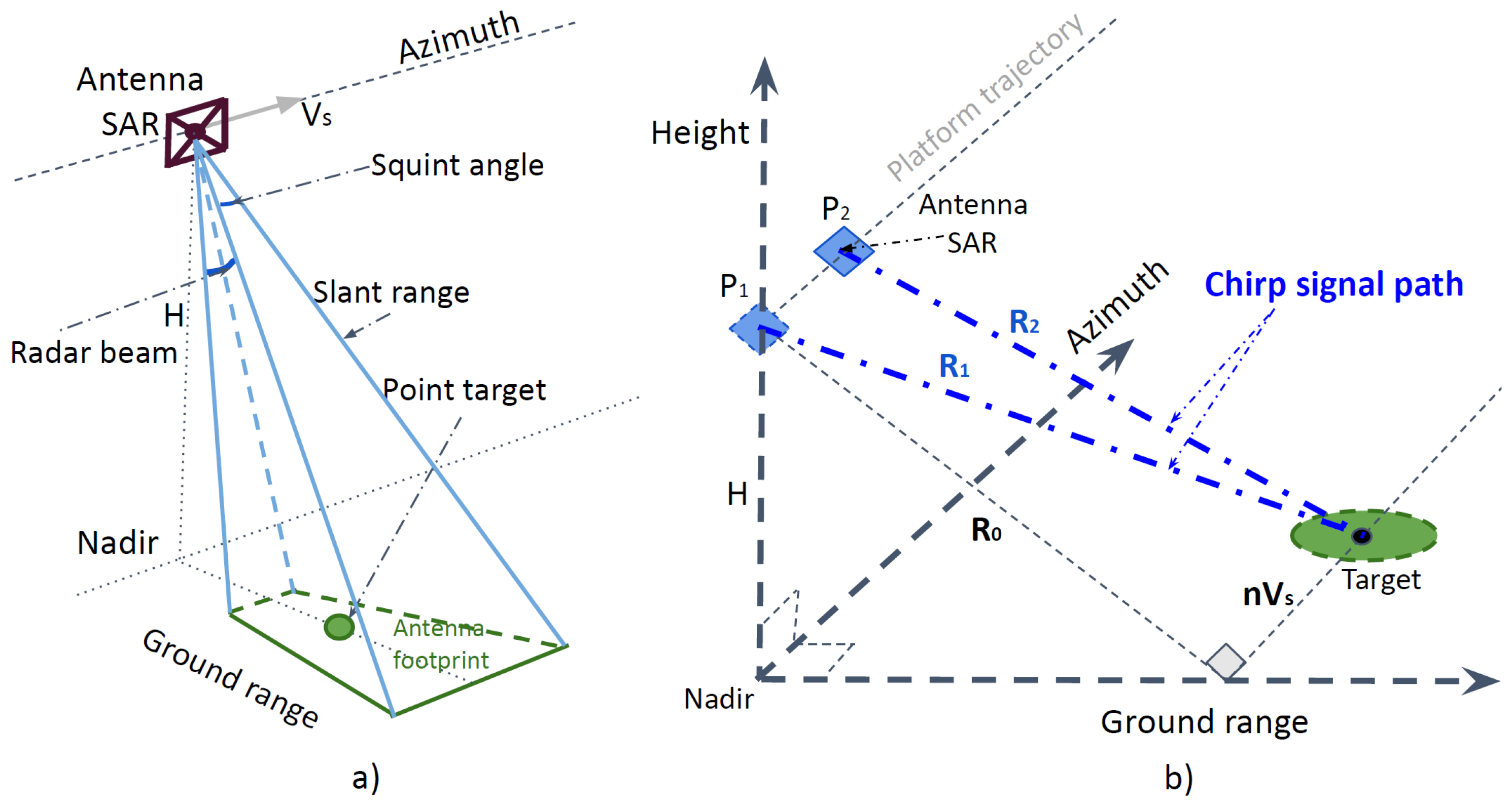
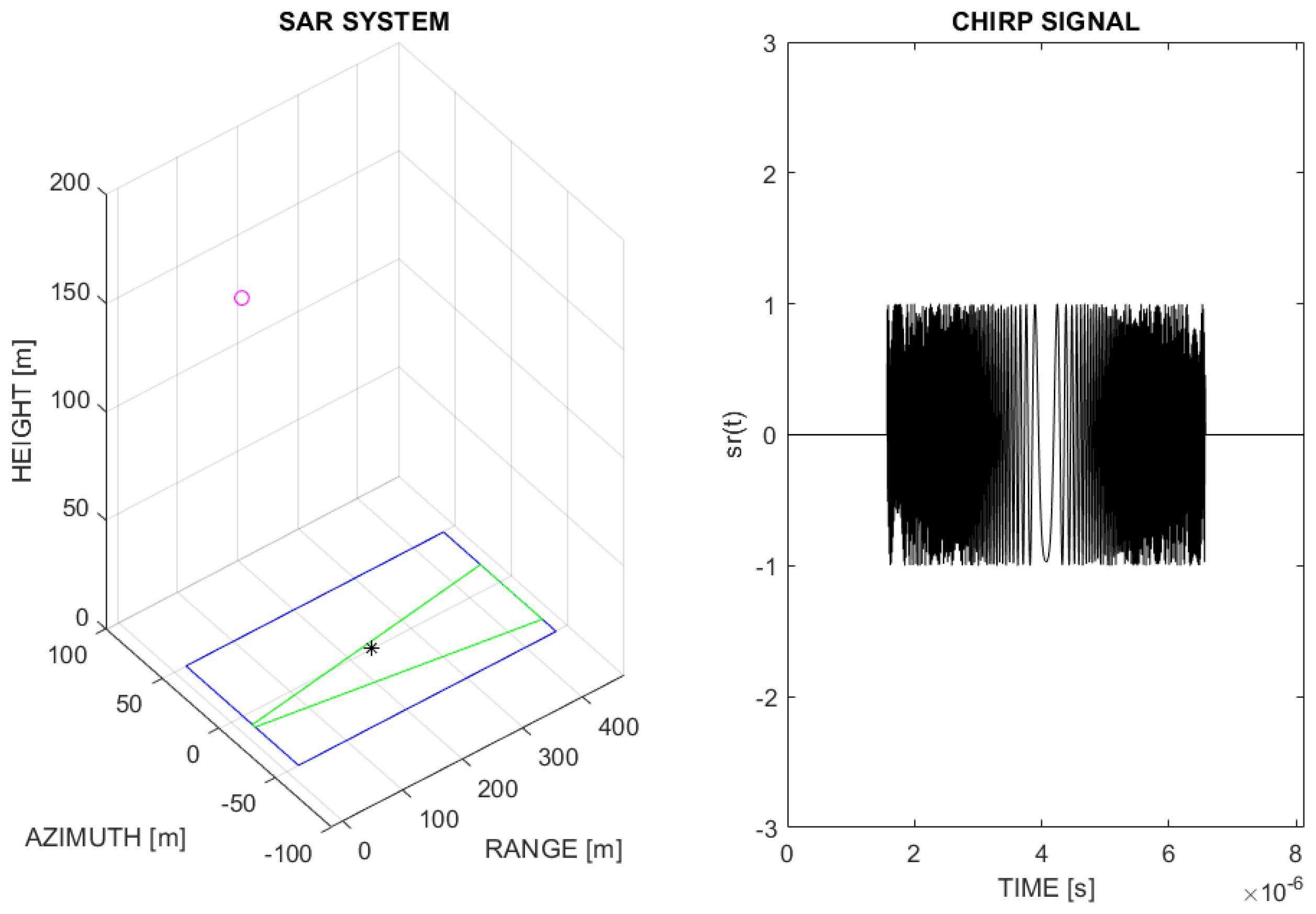
2.1. SAR Geometry
2.2. SAR Raw Signal Modeling
2.3. LFM-CW SAR Raw Signal Modeling
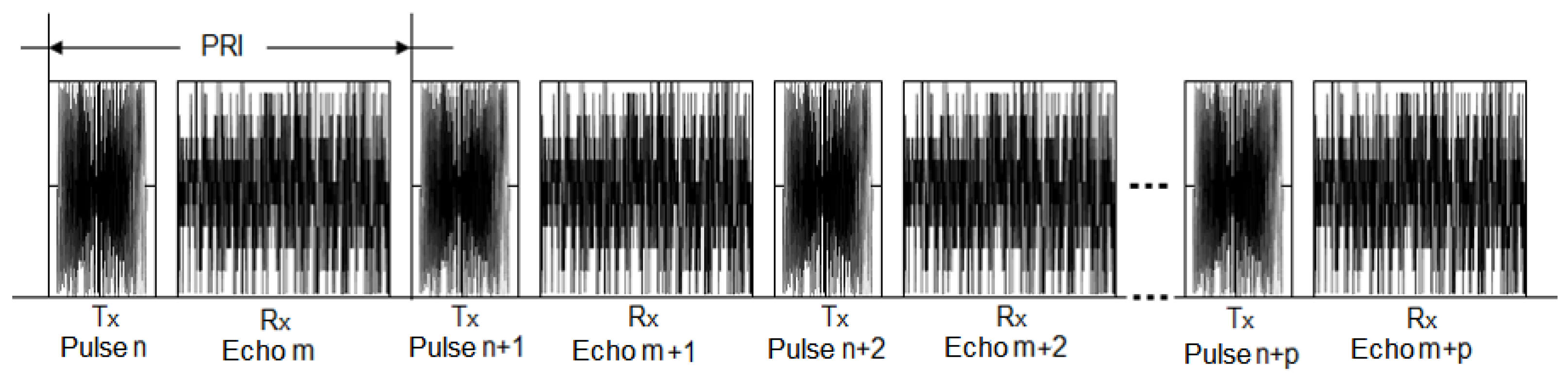
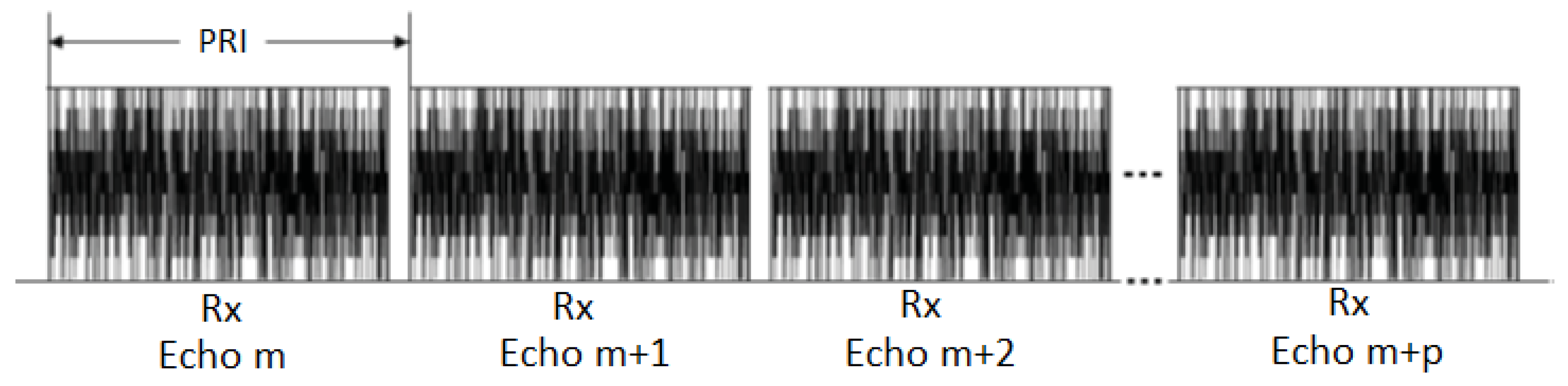
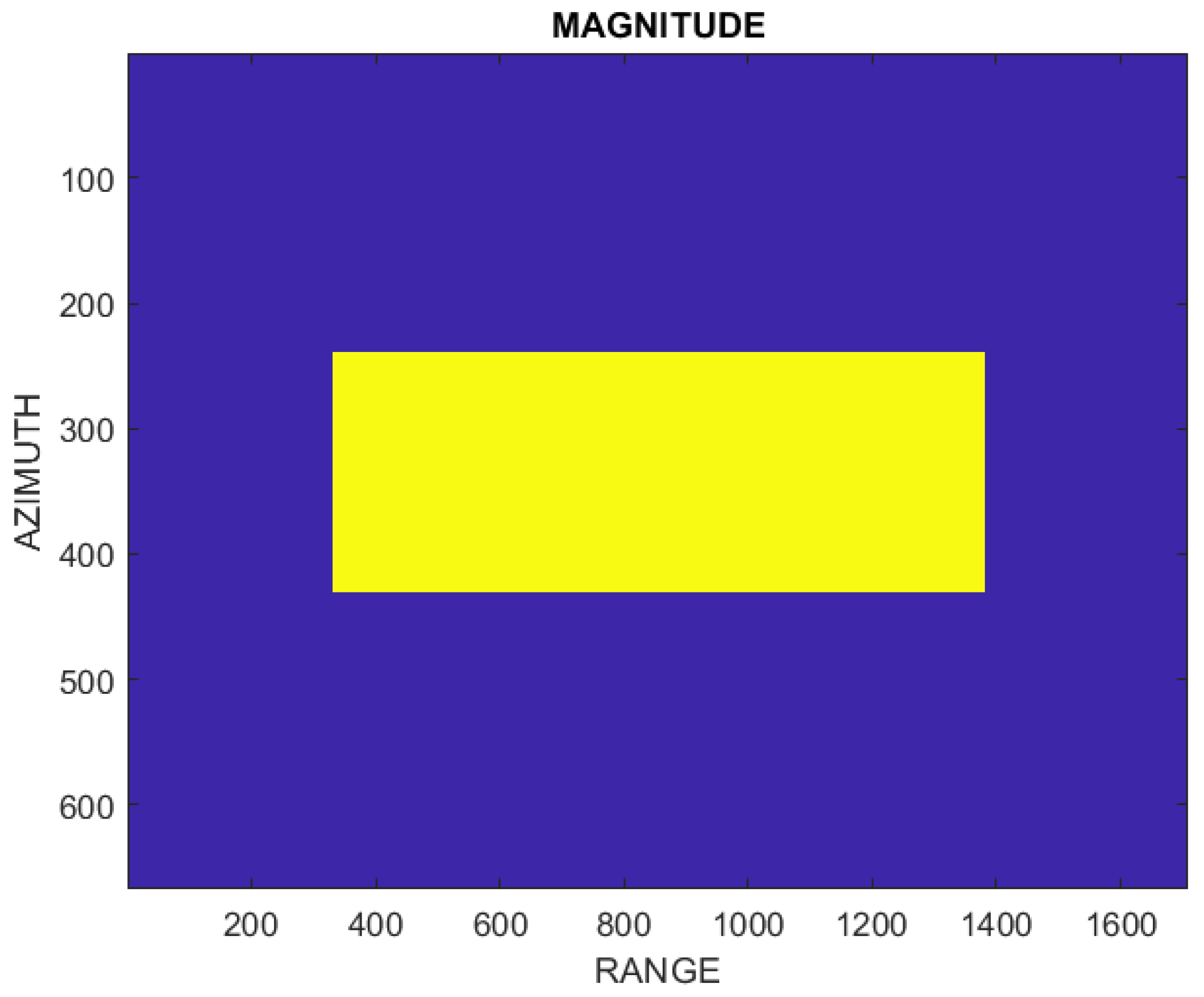
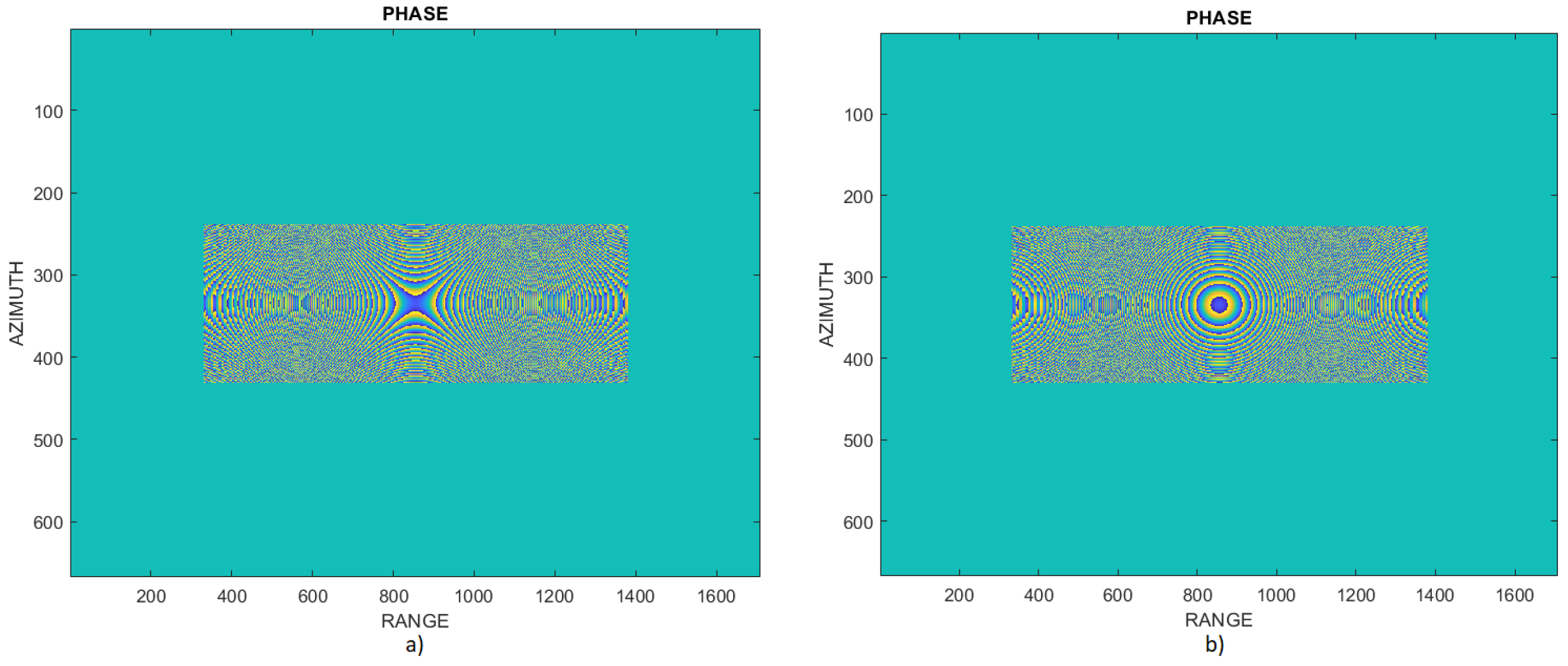
2.4. SAR Raw Data
3. Two-Dimensional Frequency Domain
3.1. SAR Raw Signal Spectrum
3.2. LFM-CW SAR Raw Signal Spectrum
4. SAR Raw Signal Processing
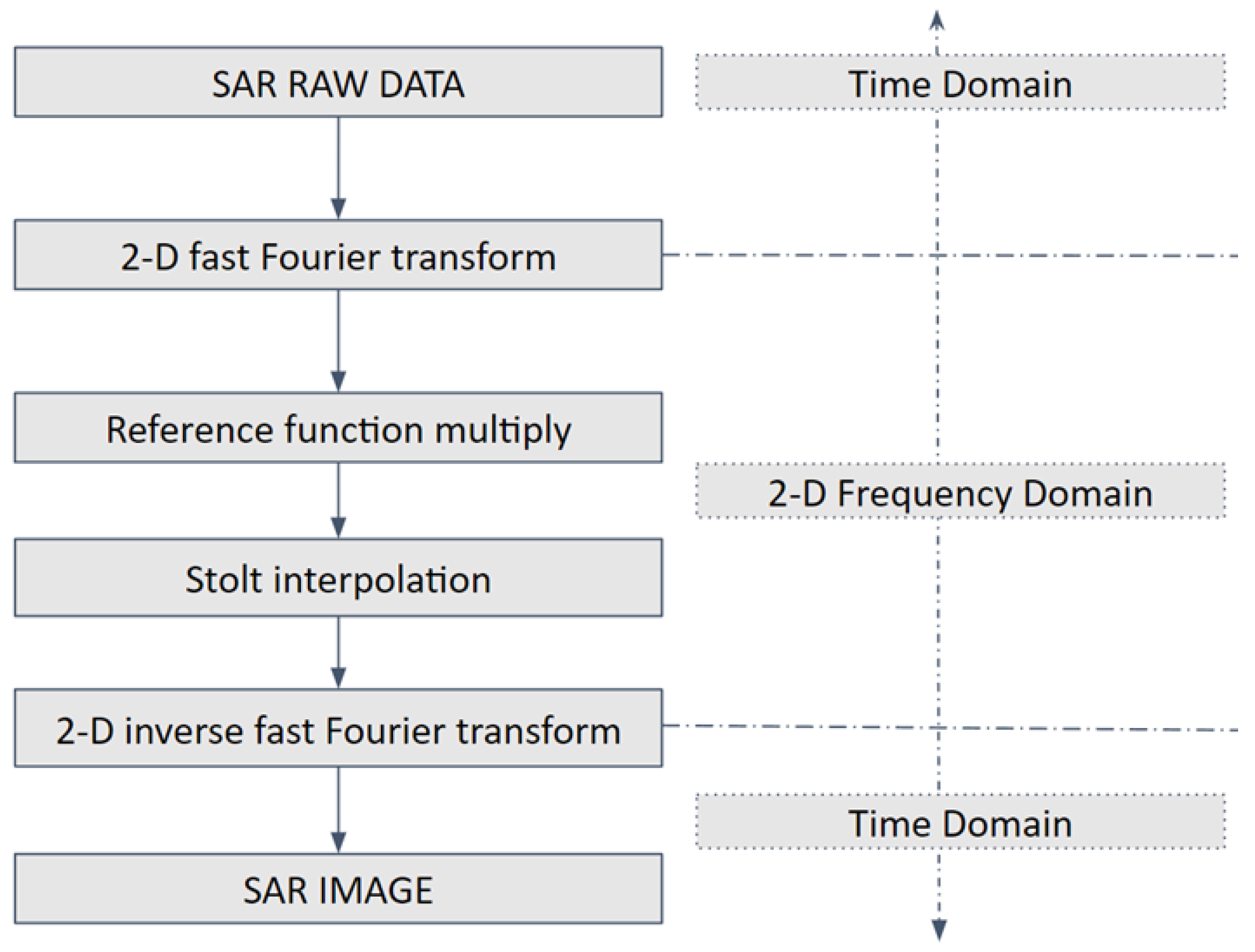
4.1. Omega-k Algorithm for SAR System
4.1.1. 2D Fast Fourier Transform
4.1.2. Reference Function Multiply
4.1.3. Stolt Interpolation
4.1.4. 2D Inverse Fast Fourier Transform
4.2. Omega-k Algorithm for LFM-CW SAR System
4.2.1. Fast Fourier Transform in Range
4.2.2. Residual Video Phase Removal
4.2.3. Motion Compensation 1
4.2.4. Fast Fourier Transform in Azimuth
4.2.5. Reference Function Multiply
4.2.6. Stolt Interpolation
4.2.7. Inverse Fast Fourier Transform in Azimuth
4.2.8. Motion Compensation 2
5. Results of Testing the Omega-k Algorithm
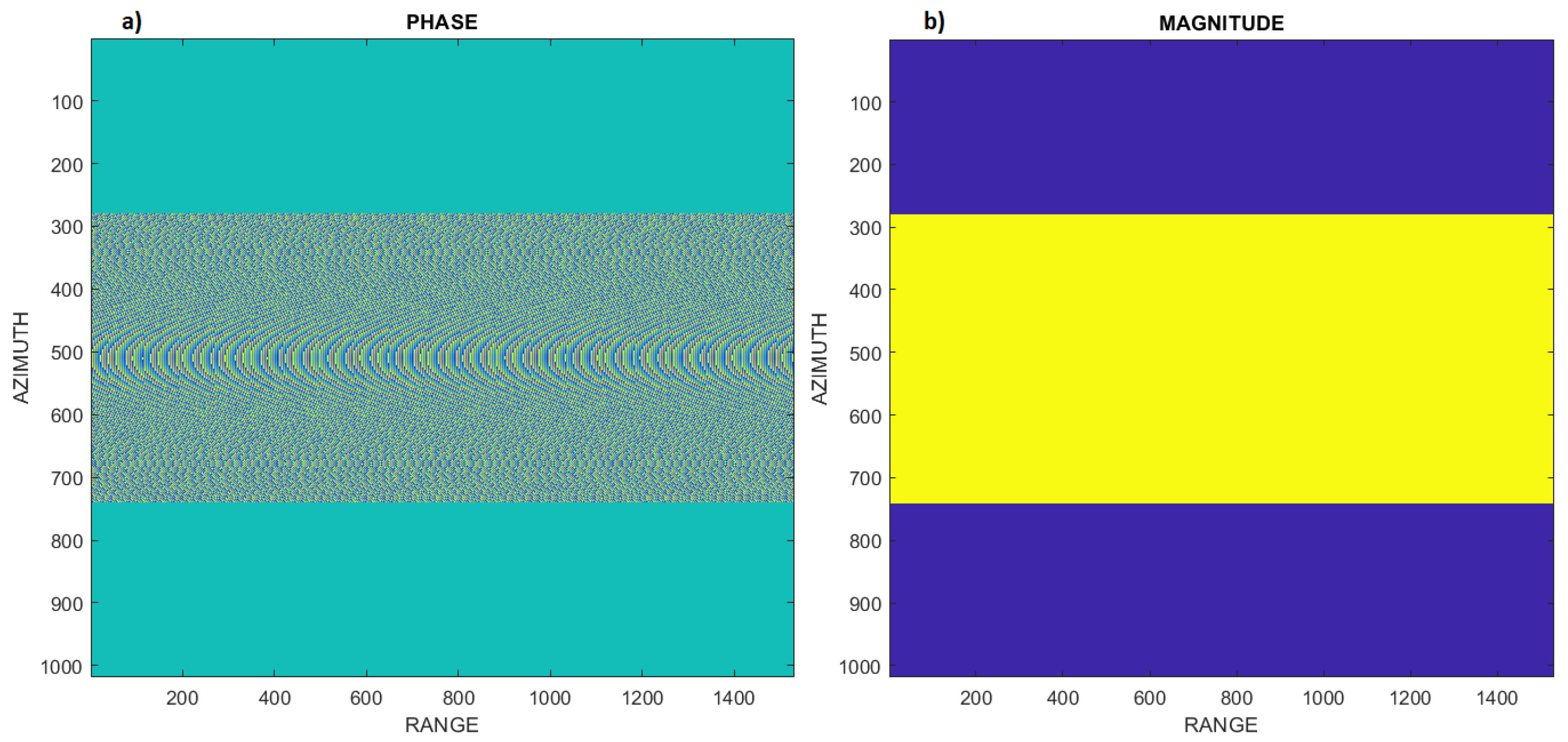
5.1. Simulated SAR Raw Data
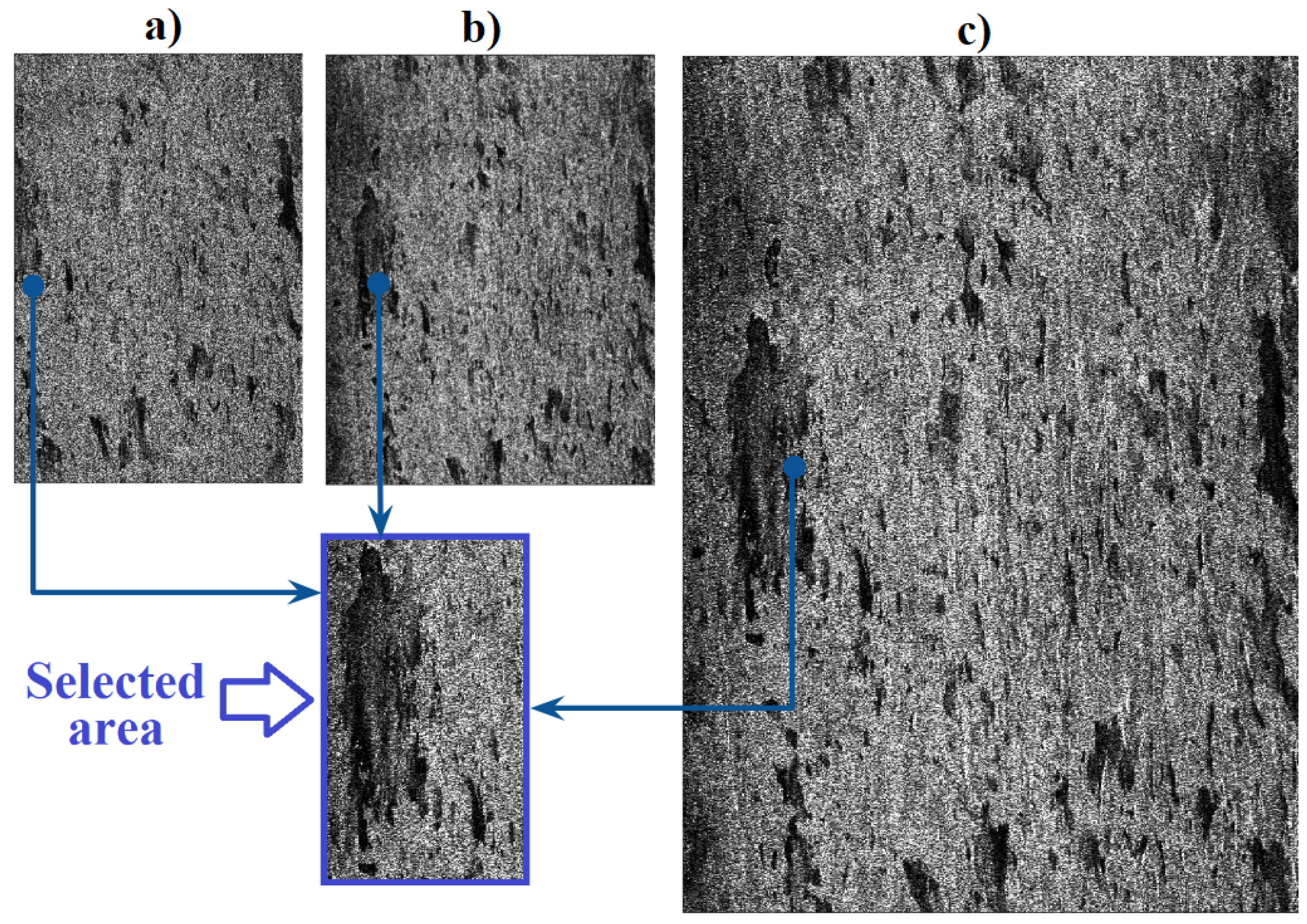
5.2. Real SAR Raw Data and Discussion
5.3. Simulated LFM-CW SAR Raw Data
5.4. Real LFM-CW SAR Raw Data and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lang, M.W.; Kasischke, E.S. Using C-Band Synthetic Aperture Radar Data to Monitor Forested Wetland Hydrology in Maryland’s Coastal Plain, USA. IEEE Trans. Geosci. Remote Sens. 2008, 46, 535–546. [Google Scholar] [CrossRef]
- Sravani, N.; Mitravinda, R.; Kumar, P.R.; Neelima, N.; Sailaja, K.L. ACMapping: Agricultural Crop Mapping/Retrieval Using Synthetic Aperture Radar (SAR) Data. In Proceedings of the 2023 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 23–25 January 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Matsuoka, M.; Yamazaki, F. Application of the damage detection method using SAR intensity images to recent earthquakes. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 4, pp. 2042–2044. [Google Scholar] [CrossRef]
- Pelich, R.; Longépé, N.; Mercier, G.; Hajduch, G.; Garello, R. AIS-Based Evaluation of Target Detectors and SAR Sensors Characteristics for Maritime Surveillance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3892–3901. [Google Scholar] [CrossRef]
- Sui, X.; Liu, M.; Li, Y. Synthetic Aperture Radar Imaging of Abrupt Underwater Topography. In Proceedings of the 2020 IEEE 5th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 23–25 October 2020; pp. 479–482. [Google Scholar] [CrossRef]
- Hu, J.; Ding, X.L.; Zhang, L.; Sun, Q.; Li, Z.W.; Zhu, J.J.; Lu, Z. Estimation of 3-D Surface Displacement Based on InSAR and Deformation Modeling. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2007–2016. [Google Scholar] [CrossRef]
- El-Darymli, K.; Moloney, C.; Gill, E.; McGuire, P.; Power, D. Design and implementation of a low-power synthetic aperture radar. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1089–1092. [Google Scholar] [CrossRef]
- Kothapudi, V.K.; Kumar, V. A 6-Port Two-Dimensional 3×3 Series-Fed Planar Array Antenna for Dual-Polarized X-Band Airborne Synthetic Aperture Radar Applications. IEEE Access 2018, 6, 12001–12007. [Google Scholar] [CrossRef]
- Khwaja, S. Fast Raw Data Generation of Realistic Environments for a SAR System Simulator. Ph.D. Thesis, Université Rennes 1, Lannion, France, 2009. [Google Scholar]
- Hughes, W.; Gault, K.; Princz, G. A comparison of the Range-Doppler and Chirp Scaling algorithms with reference to RADARSAT. In Proceedings of the 1996 International Geoscience and Remote Sensing Symposium (IGARSS ’96), Lincoln, NE, USA, 31 May 1996; Volume 2, pp. 1221–1223. [Google Scholar] [CrossRef]
- Raney, R.; Runge, H.; Bamler, R.; Cumming, I.; Wong, F. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Cumming, I.; Neo, Y.; Wong, F. Interpretations of the omega-K algorithm and comparisons with other algorithms. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium (Proceedings IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; Volume 3, pp. 1455–1458. [Google Scholar] [CrossRef]
- Israel Duersch, M. Backprojection for Synthetic Aperture Radar. Ph.D. Thesis, Brigham Young University, Provo, UT, USA, 2013. [Google Scholar]
- Zaugg, E.C. Generalized Image Formation for Pulsed and LFM-CW Synthetic Aperture RadarAperture Rada. Ph.D. Thesis, Brigham Young University, Provo, UT, USA, 2010. [Google Scholar]
- Wang, R.; Loffeld, O.; Nies, H.; Knedlik, S.; Hagelen, M.; Essen, H. Focus FMCW SAR Data Using the Wavenumber Domain Algorithm. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2109–2118. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H.C. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Jancco Chara, J.; Palomino Quispe, F.; Coaquira Castillo, R.J.; Clemente-Arenas, M. Omega-k Algorithm Implementation for Linear Frequency Modulated-Continous Wave SAR Signal Processing. In Proceedings of the 2020 IEEE XXVII International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 3–5 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Bi, H.; Wang, J.; Bi, G. Wavenumber Domain Algorithm-Based FMCW SAR Sparse Imaging. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7466–7475. [Google Scholar] [CrossRef]
- Jancco Chara, J. Diseño e Implementación del Procesamiento de Señales SAR para Estimación de la Altura Forestal. Undergraduate Thesis, Universidad Nacional de San Antonio Abad del Cusco, Cusco, Peru, 2021. [Google Scholar]
- Hein, A. Processing of SAR Data: Fundamentals, Signal Processing, Interferometry; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Stremler, F.G. Introduction to Commucation Systems, 3rd ed.; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Guo, S.; Dong, X. Modified Omega-K algorithm for ground-based FMCW SAR imaging. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1647–1650. [Google Scholar] [CrossRef]
- Zeng, T.; Hu, C.; Sun, H.; Chen, E. A Novel Rapid SAR Simulator Based on Equivalent Scatterers for Three-Dimensional Forest Canopies. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5243–5255. [Google Scholar] [CrossRef]
- Jancco-Chara, J.; Palomino-Quispe, F.; Coaquira-Castillo, R.; Clemente-Arenas, M. A Novel Technique for Forest Height Estimation from SAR Radar Images Using the Omega K Algorithm. In Smart Technologies, Systems and Applications; Narváez, F.R., Proaño, J., Morillo, P., Vallejo, D., González Montoya, D., Díaz, G.M., Eds.; Springer: Cham, Switzerland, 2022; pp. 190–203. [Google Scholar] [CrossRef]
- Long, G.D.; Stringham, C. The Sample BYU CASIE-09 MicroaSAR Dataset; Center for Remote Sensing, Brigham Young University: Provo, UT, USA, 2011. [Google Scholar]
- European Space Agency. Dataset: L0-ERS-2, ESA 2009. Retrieved from ASF DAAC 20 November 2019. Land Processes Distributed Active Archive Center; Dataset: L0-ERS-2; ESA: Paris, France, 2009. [Google Scholar]
- European Space Agency. Dataset: L0-ERS-2, ESA 1997. Retrieved from ASF DAAC 25 August 2023. Land Processes Distributed Active Archive Center; Dataset: L0-ERS-2; ESA: Paris, France, 1997. [Google Scholar] [CrossRef]
- Edwards, M.; Madsen, D.; Stringham, C.; Margulis, A.; Wicks, B.; Long, D.G. microASAR: A Small, Robust LFM-CW SAR for Operation on UAVs and Small Aircraft. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2008), Boston, MA, USA, 7–11 July 2008; Volume 5, pp. V-514–V-517. [Google Scholar] [CrossRef]
- Stringham, C.; Long, D.G. Improved processing of the casie SAR data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1389–1392. [Google Scholar] [CrossRef]
- Zaugg, E.; Long, D.; Edwards, M.; Fladeland, M.; Kolyer, R.; Crocker, I.; Maslanik, J.; Herzfeld, U.; Wallin, B. Using the MicroASAR on the NASA SIERRA UAS in the Characterization of Arctic Sea Ice Experiment. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 271–276. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameters | Symbol | Values |
|---|---|---|
| Carrier frequency | 5.3 | |
| Bandwidth | B | 150 |
| Pulse repetition rate | 100 | |
| Pulse width | ||
| Horizontal beam width | 7 | |
| SAR platform speed | 15 m/s | |
| Speed of light | c | m/s |
| Parameters | Symbol | Values |
|---|---|---|
| Range Resolution | 0.81 m | |
| Azimuth Resolution | 0.204 m | |
| Peak Side Lobe Ratio | −7.05 dB | |
| −10.57 dB | ||
| Integrated Side Lobe Ratio | −4.31 dB | |
| −2.74 dB |
| Main Parameters | Symbol | Values |
|---|---|---|
| Carrier frequency | 5.3 | |
| Bandwidth | B | 15.5 |
| Pulse repetition rate | 1679.90233438 | |
| Sample rate | 18.86 | |
| chirp modulation rate | /s | |
| Angle of incidence | 23 | |
| SAR platform speed | 7543.41 m/s | |
| Speed of light | c | m/s |
| Main Parameters | Symbol | Values |
|---|---|---|
| Carrier frequency | 5.4287 | |
| Bandwidth | B | 170 |
| Pulse repetition rate | 307.292 | |
| Horizontal beam width | 11 | |
| SAR platform speed | m/s | |
| Speed of light | c | m/s |
| Parameters | Symbol | Values |
|---|---|---|
| Range Resolution | 0.9 m | |
| Azimuth Resolution | 0.14 m | |
| Peak Side Lobe Ratio | −8.26 dB | |
| −7.92 dB | ||
| Integrated Side Lobe Ratio | −2.95 dB | |
| −5.07 dB |
| Main Parameters | Symbol | Values |
|---|---|---|
| Carrier frequency | 5.42876 | |
| Bandwidth | B | 170 |
| Pulse repetition rate | 307.292 | |
| Sample rate | 18.86 | |
| Chirp modulation rate | ||
| Angle of incidence | 11 | |
| SAR platform speed | 30.1938 m/s | |
| Speed of light | c | m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jancco-Chara, J.; Palomino-Quispe, F.; Coaquira-Castillo, R.J.; Herrera-Levano, J.C.; Florez, R. Doppler Factor in the Omega-k Algorithm for Pulsed and Continuous Wave Synthetic Aperture Radar Raw Data Processing. Appl. Sci. 2024, 14, 320. https://doi.org/10.3390/app14010320
Jancco-Chara J, Palomino-Quispe F, Coaquira-Castillo RJ, Herrera-Levano JC, Florez R. Doppler Factor in the Omega-k Algorithm for Pulsed and Continuous Wave Synthetic Aperture Radar Raw Data Processing. Applied Sciences. 2024; 14(1):320. https://doi.org/10.3390/app14010320
Chicago/Turabian StyleJancco-Chara, Jhohan, Facundo Palomino-Quispe, Roger Jesus Coaquira-Castillo, Julio Cesar Herrera-Levano, and Ruben Florez. 2024. "Doppler Factor in the Omega-k Algorithm for Pulsed and Continuous Wave Synthetic Aperture Radar Raw Data Processing" Applied Sciences 14, no. 1: 320. https://doi.org/10.3390/app14010320
APA StyleJancco-Chara, J., Palomino-Quispe, F., Coaquira-Castillo, R. J., Herrera-Levano, J. C., & Florez, R. (2024). Doppler Factor in the Omega-k Algorithm for Pulsed and Continuous Wave Synthetic Aperture Radar Raw Data Processing. Applied Sciences, 14(1), 320. https://doi.org/10.3390/app14010320