
Redesign of Leg Assembly and Implementation of Reinforcement Learning for a Multi-Purpose Rehabilitation Robotic Device (RoboREHAB)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
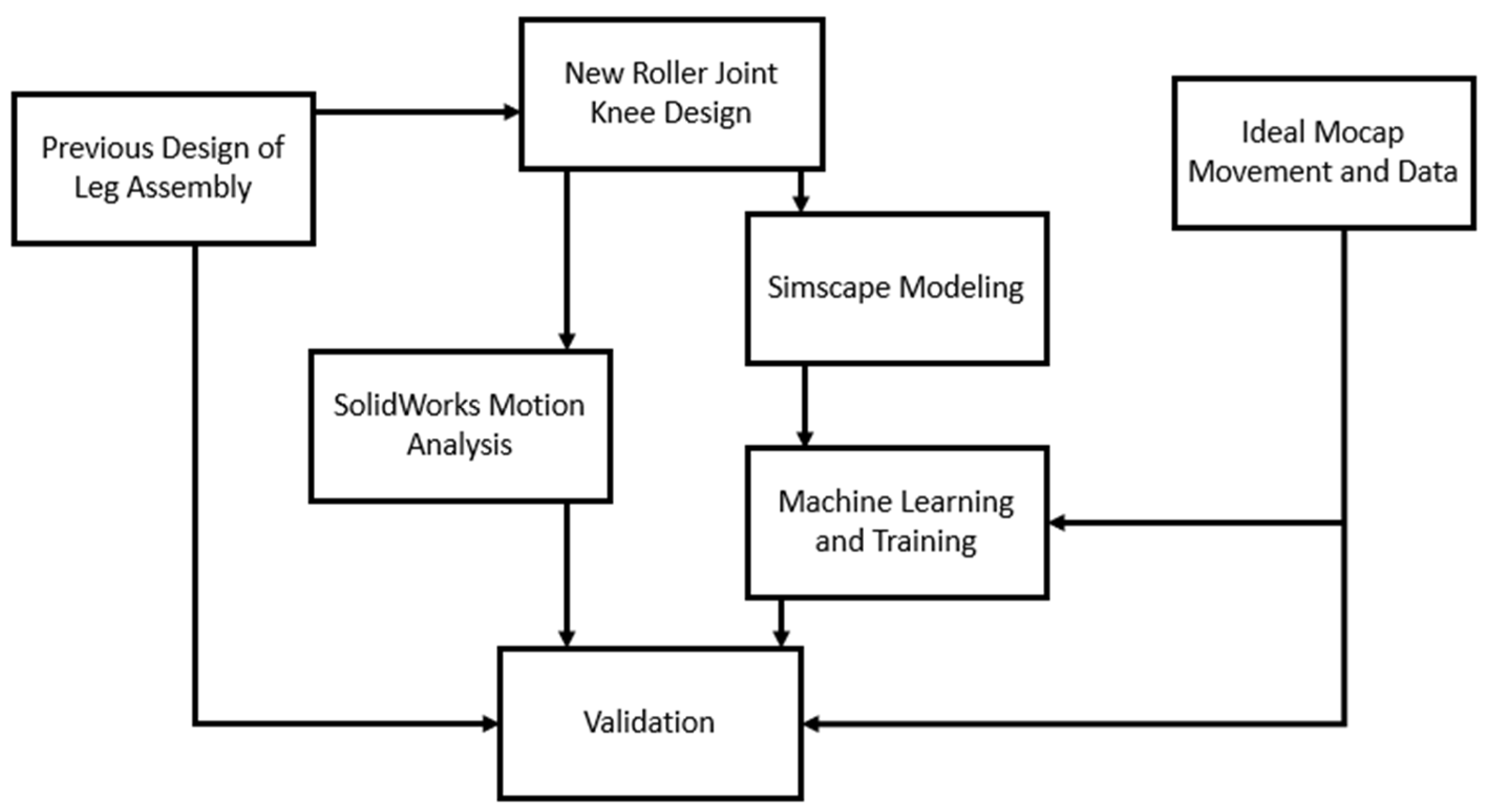
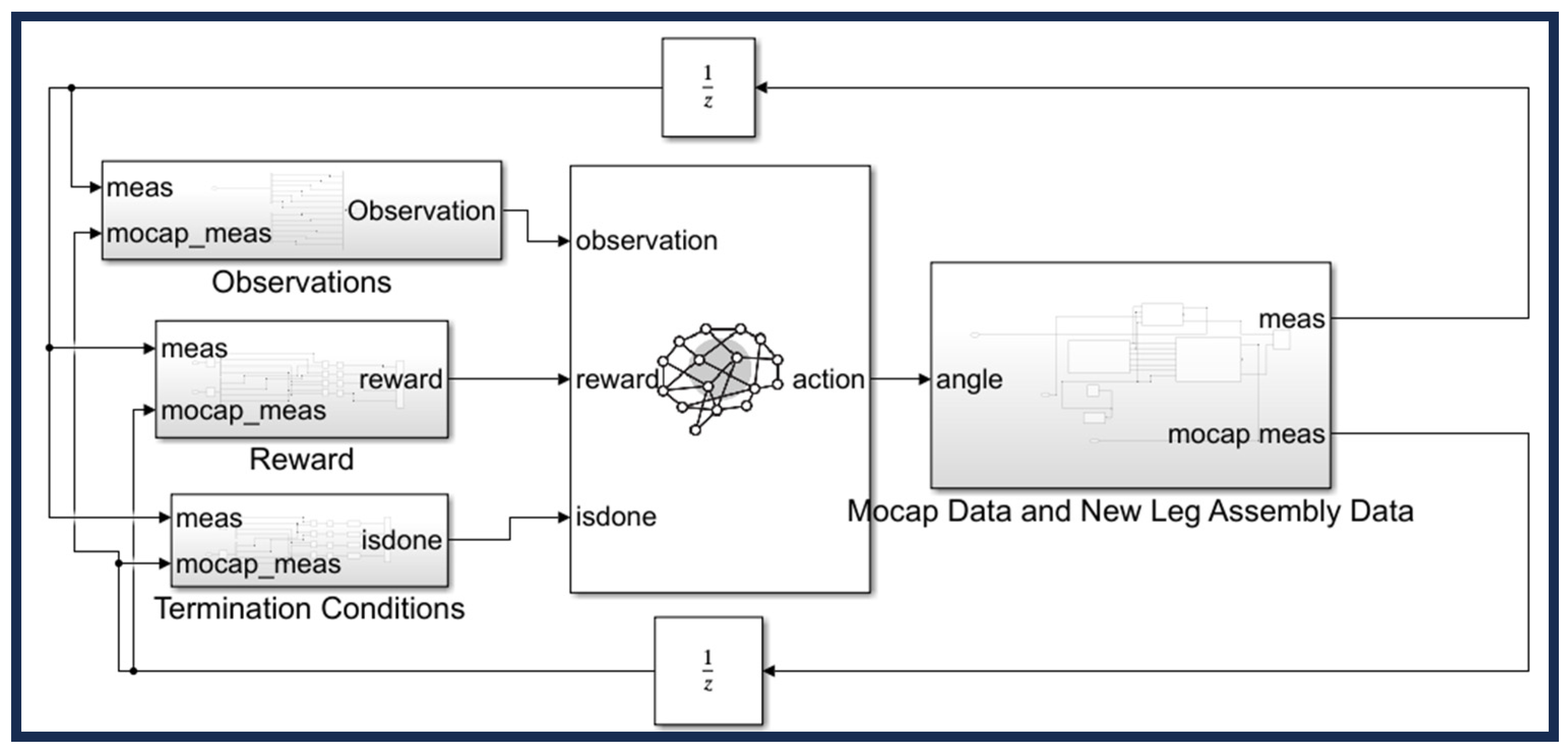
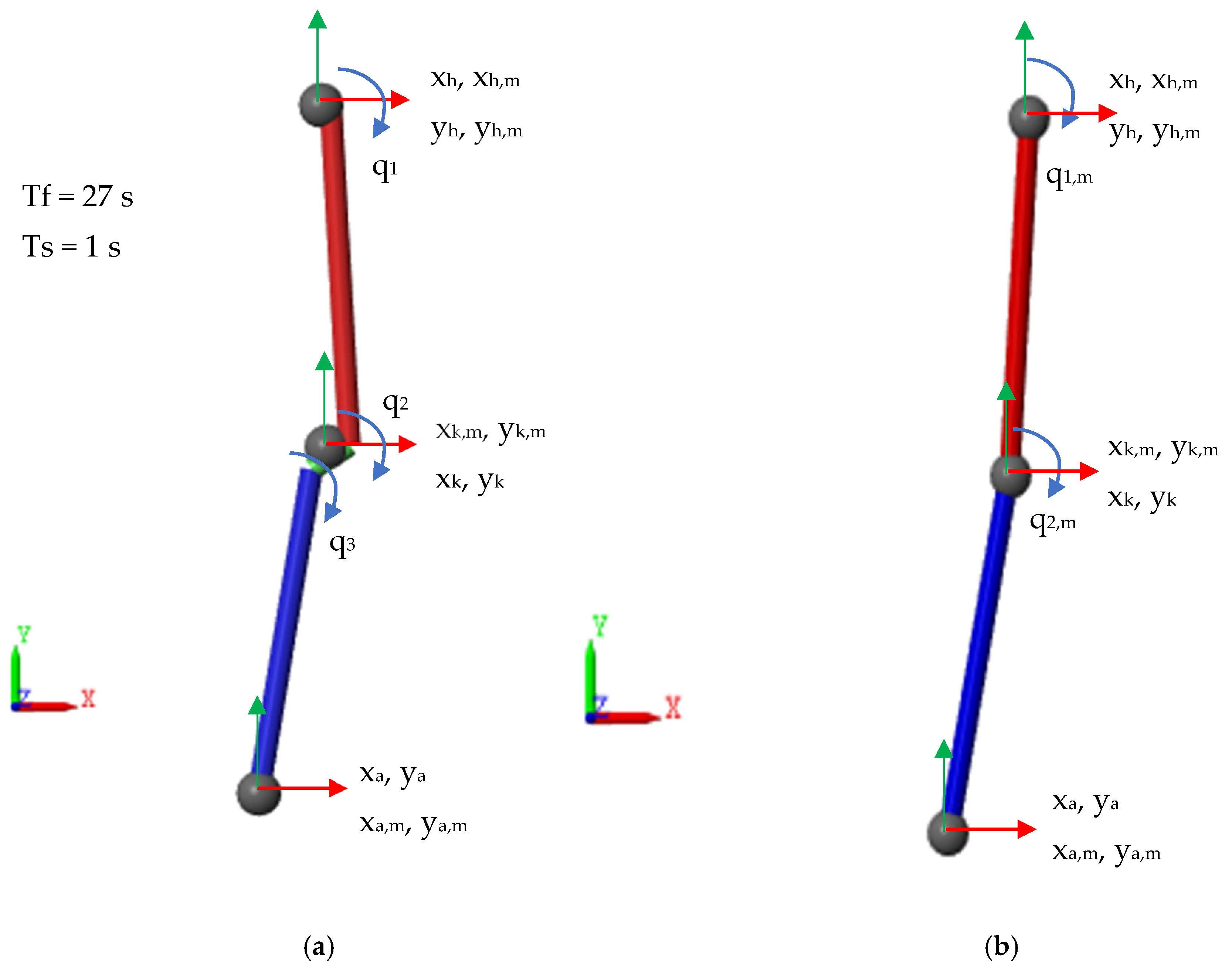
2. Design and Methods
- Initialize angles of the leg segments and load any previous experience if any exists.
- For = 0: : sec.
- Initialize state from observations signal as the first state in this sequence, retrieving joint positions and angles from the MATLAB leg model.
- Obtain the action signal from the actor’s current network.
- Perform the action, obtain the new observation signal and reward signal, and determine if the episode ended prematurely by checking the ‘isdone’ block (does the distance between the leg model and mocap joints exceed the threshold?).
- Store {observation, action, reward, newObservation, isdone} for empirical playback.
- newObservation = observation.
- action = prevAction.
- Determine the q-value of the action from the empirical playback.
- Update actor’s and critic’s networks.
- If the new observation has satisfied the ‘isdone’ criteria, the episode is over. If not, continue with the next step.
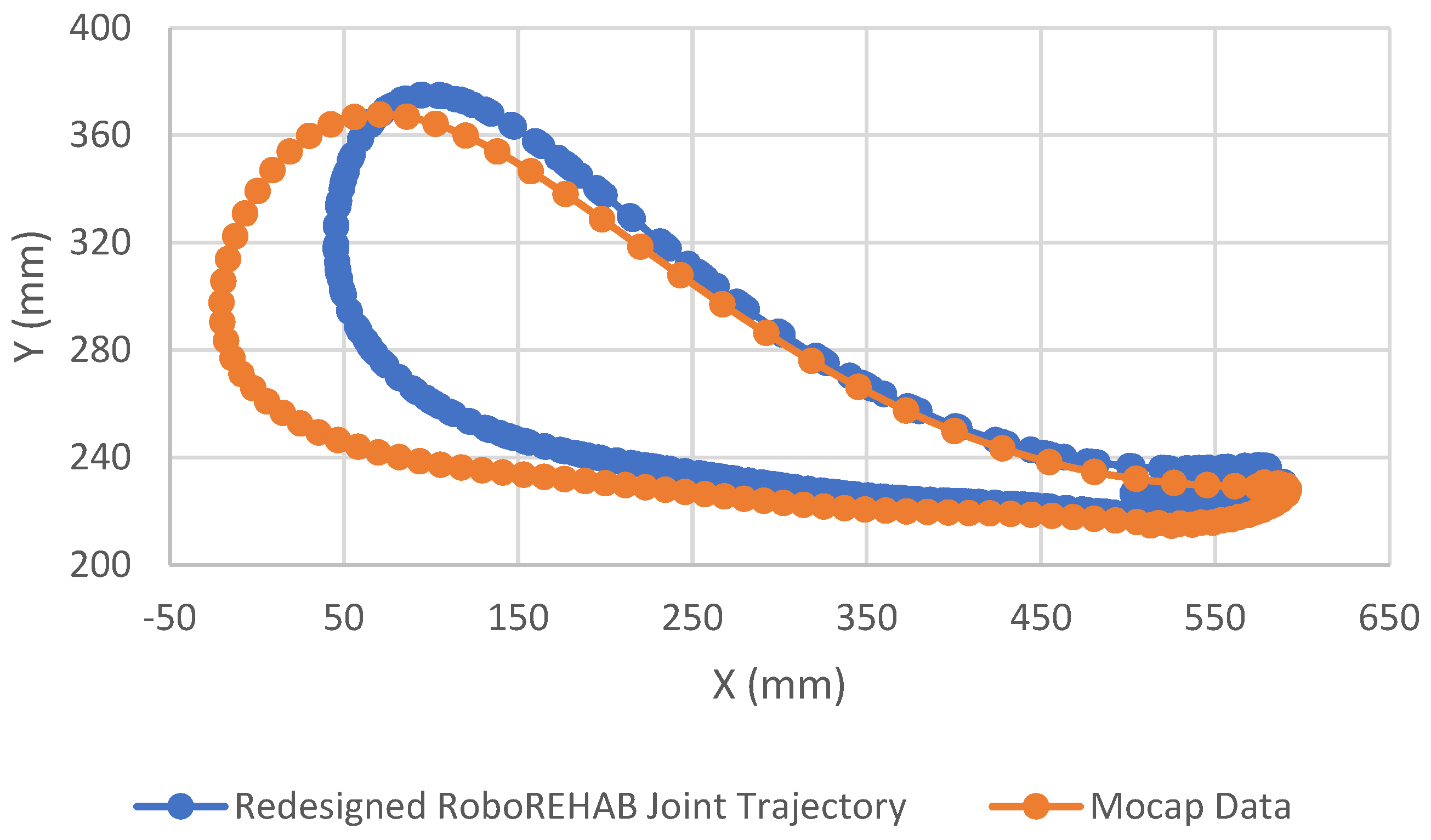
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahuja, C.S.; Nori, S.; Tetreault, L.; Wislon, J.; Kwon, B.; Harrop, J.; Choi, D.; Fehlings, M.G. Traumatic Spinal Cord Injury-Repair and Regeneration. Neurosurgery 2017, 80, S9–S22. [Google Scholar] [CrossRef] [PubMed]
- Centers for Disease Control and Prevention (CDC 24/7: Saving Lives, Protecting People, Cerebral Palsy. Available online: https://www.cdc.gov/ncbddd/cp/facts.html (accessed on 1 March 2022).
- Mayo Clinic, Cerebral Palsy. Available online: https://www.mayoclinic.org/diseases-conditions/cerebral-palsy/symptoms-causes/syc-20353999 (accessed on 1 March 2022).
- Gordon, A.M.; Hung, Y.-C.; Brandao, M.; Ferre, C.L.; Kuo, H.-C.; Friel, K.; Petra, E.; Chinnan, A.; Charles, J.R. Bimanual Training and Constraint-Induced Movement Therapy in Children with Hemiplegic Cerebral Palsy: A Randomized Trial. Neurorehabilit. Neural Repair 2011, 25, 692–702. [Google Scholar] [CrossRef] [PubMed]
- Kitago, T.; Liang, J.; Huang, V.; Hayes, S.; Simon, P.; Tenteromano, L.; Lazar, R.M.; Marshall, R.S.; Mazzoni, P.; Lennihan, L.; et al. Improvement after Constraint-Induced Movement Therapy: Recovery of Normal Motor Control or Task-Specific Compensation? Neurorehabilit. Neural Repair 2013, 27, 99–109. [Google Scholar] [CrossRef] [PubMed]
- Lerner, Z.F.; Damiano, D.L.; Bulea, T.C. A Lower-Extremity Exoskeleton Improves Knee Extension in Children with Crouch Gait from Cerebral Palsy. Sci. Transl. Med. 2017, 9, eaam9145. [Google Scholar] [CrossRef] [PubMed]
- Baunsgaard, C.B.; Nissen, U.V.; Brust, A.K.; Frotzler, A.; Ribeill, C.; Kalke, Y.-B.; León, N.; Gómez, B.; Samulelsson, K.; Antepohl, W.; et al. Gait Training After Spinal Cord Injury: Safety, Feasibility and Gait Function Following 8 Weeks of Training with the Exoskeletons from Ekso Bionics. Spinal Cord 2018, 56, 106–116. [Google Scholar] [CrossRef] [PubMed]
- Kolakowsky-Hayner, S.A.; Crew, J.; Moran, S.; Shah, A. Safety and Feasibility of Using the EksoTM Bionic Exoskeleton to Aid Ambulation after Spinal Cord Injury. J. Spine 2013, S4, 1–8. Available online: https://www.omicsonline.org/open-access-pdfs/safety-and-feasibility-of-using-the-ekso-bionic-exoskeleton-to-aid-ambulation-after-spinal-cord-injury-2165-7939.S4-003.pdf (accessed on 1 March 2022). [CrossRef]
- Anthony, J.; Goh, C.H.; Wang, Y.T. Redesign of Leg Assembly and Implementation of Reinforcement Learning for Robotic Walking Training Device. In Proceedings of the KSME Annual Meeting 2022, Jeju, Republic of Korea, 9–12 November 2022. [Google Scholar]
- Corke, P. Robotics, Vision, and Control: Fundamental Algorithms in MATLAB, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Rozumalski, A.; Schwartz, M.H. Crouch Gait Patterns Defined using K-Means Cluster Analysis are Related to Underlying Clinical Pathology. Gait Posture 2009, 30, 155–160. [Google Scholar] [CrossRef] [PubMed]
- Choi, W.; Yang, W.; Na, J.; Lee, G.; Nam, W. Feature Optimization for Gait Phase Estimation with a Genetic Algorithm and Bayesian Optimization. Appl. Sci. 2021, 11, 8940–8953. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; MIT Press: Cambridge, MA, USA, 2014; Available online: https://web.stanford.edu/class/psych209/Readings/SuttonBartoIPRLBook2ndEd.pdf (accessed on 28 February 2023).
- Xu, J.; Xu, L.; Li, Y.; Cheng, G.; Shi, J.; Liu, J.; Chen, S. A Multi-Channel Reinforcement Learning Framework for Robotic Mirror Therapy. IEEE Robot. Autom. Lett. 2020, 5, 5385–5392. [Google Scholar] [CrossRef]
- Xu, J.; Xu, L.; Ji, A.; Cao, K. Learning Robotic Motion with Mirror Therapy Framework for Hemiparesis Rehabilitation. Inf. Process. Manag. 2023, 60, 103244–103259. [Google Scholar] [CrossRef]
- OpenAI, Deep Deterministic Policy Gradient. Available online: https://spinningup.openai.com/en/latest/algorithms/ddpg.html (accessed on 1 March 2022).
- OpenAI, Twin Delayed DDPG. Available online: https://spinningup.openai.com/en/latest/algorithms/td3.html (accessed on 1 March 2022).
- Fujimoto, S.; van Hoof, H.; Meger, D. Addressing Function Approximation Error in Actor-Critic Methods. In Proceedings of the 35th International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; Volume 80, pp. 1587–1596. Available online: https://proceedings.mlr.press/v80/fujimoto18a.html (accessed on 28 February 2023).
- Bingjing, G.; Jianhai, H.; Xiangpan, L.; Lin, Y. Human-Robot Interactive Control Based on Reinforcement Learning for Gait Rehabilitation Training Robot. Int. J. Adv. Robot. Syst. 2019, 16, 1–16. [Google Scholar] [CrossRef]
- Jacksonville Orthopedic Institute, Knee Anatomy: Muscles, Ligaments, and Cartilage. Available online: https://www.joionline.net/trending/content/knee-anatomy (accessed on 28 February 2023).
- Hershler, C.; Milner, M. Angle-angle Diagrams in the Assessment of Locomotion. Am. J. Phys. Med. Rehabil. 1980, 59, 109–125. [Google Scholar]
- Arippa, F.; Leban, B.; Monticone, M.; Cossu, G.; Casula, C.; Pau, M. A Study on Lower Limb Asymmetries in Parkinson’s Disease during Gait Assessed through Kinematic-Derived Parameters. Bioengineering 2022, 9, 120. [Google Scholar] [CrossRef] [PubMed]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anthony, J.; Goh, C.-H.; Yazdanshenas, A.; Wang, Y.T. Redesign of Leg Assembly and Implementation of Reinforcement Learning for a Multi-Purpose Rehabilitation Robotic Device (RoboREHAB). Appl. Sci. 2024, 14, 516. https://doi.org/10.3390/app14020516
Anthony J, Goh C-H, Yazdanshenas A, Wang YT. Redesign of Leg Assembly and Implementation of Reinforcement Learning for a Multi-Purpose Rehabilitation Robotic Device (RoboREHAB). Applied Sciences. 2024; 14(2):516. https://doi.org/10.3390/app14020516
Chicago/Turabian StyleAnthony, Jacob, Chung-Hyun Goh, Alireza Yazdanshenas, and Yong Tai Wang. 2024. "Redesign of Leg Assembly and Implementation of Reinforcement Learning for a Multi-Purpose Rehabilitation Robotic Device (RoboREHAB)" Applied Sciences 14, no. 2: 516. https://doi.org/10.3390/app14020516
APA StyleAnthony, J., Goh, C. -H., Yazdanshenas, A., & Wang, Y. T. (2024). Redesign of Leg Assembly and Implementation of Reinforcement Learning for a Multi-Purpose Rehabilitation Robotic Device (RoboREHAB). Applied Sciences, 14(2), 516. https://doi.org/10.3390/app14020516