
An Interpretable Deep Learning Approach for Detecting Marine Heatwaves Patterns


Abstract
:1. Introduction
2. Methods
2.1. Prediction Using the LSTM Network
2.1.1. Data
2.1.2. LSTM Model
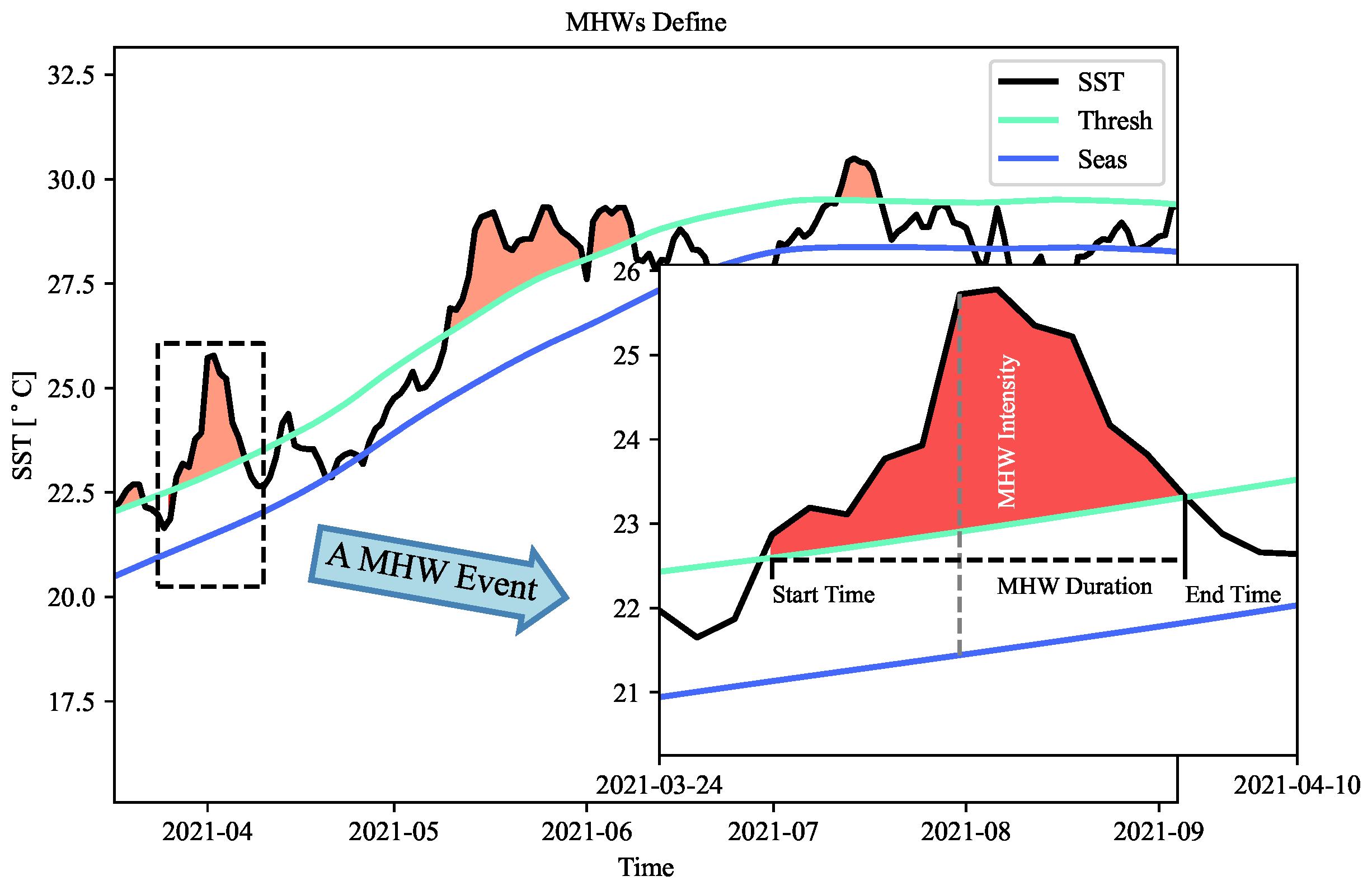
2.2. Marine Heat Waves (MHWs) Definition and Indices

2.3. Expected Gradients for Feature Importance
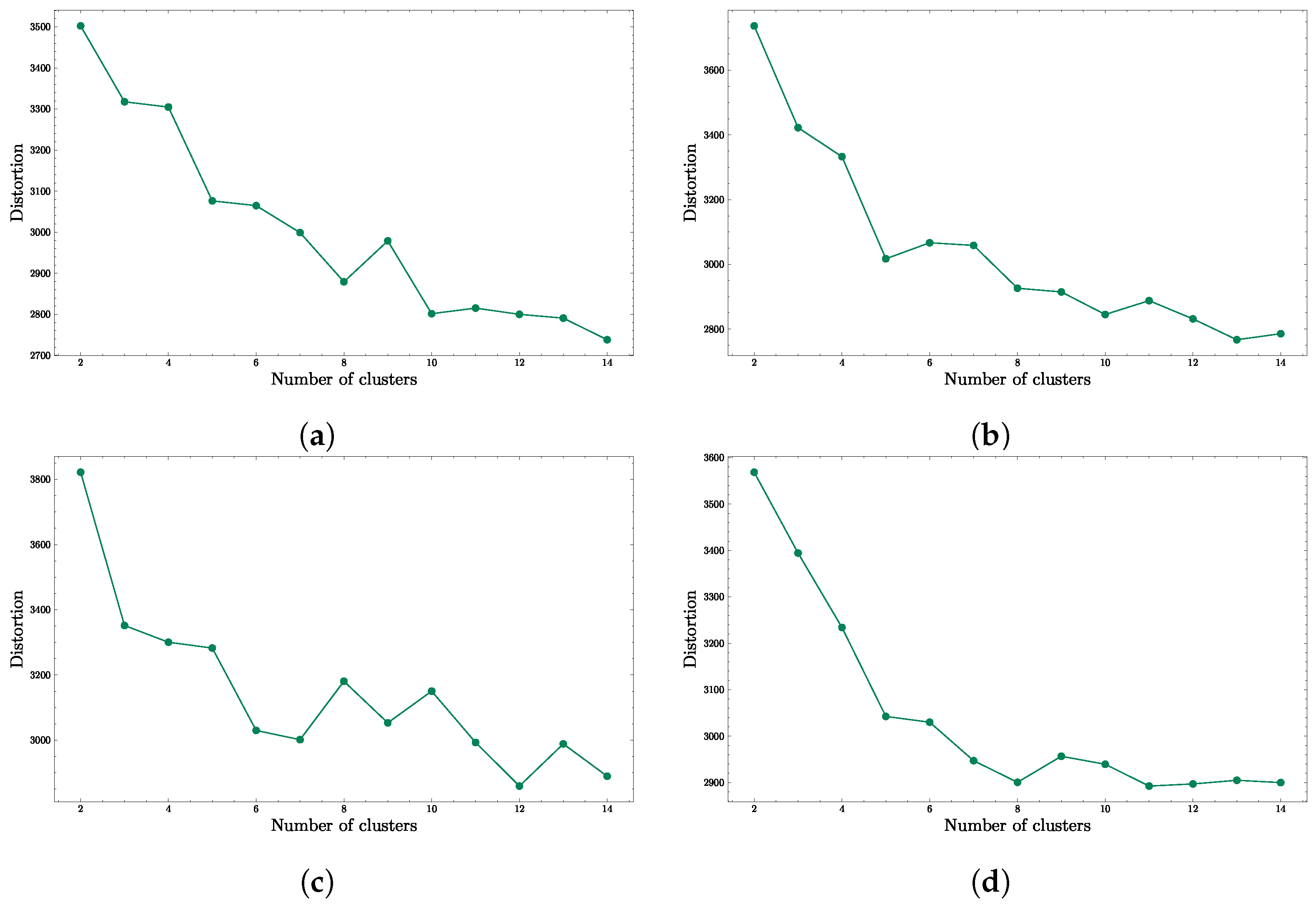
2.4. Clustering of Marine Heatwaves by Feature Importance
2.5. Additive Decomposition to Assess LSTM Decisions
3. Results
3.1. Predictive Performance and Identified Marine Heatwaves
3.2. Distinctive Recognized Patterns
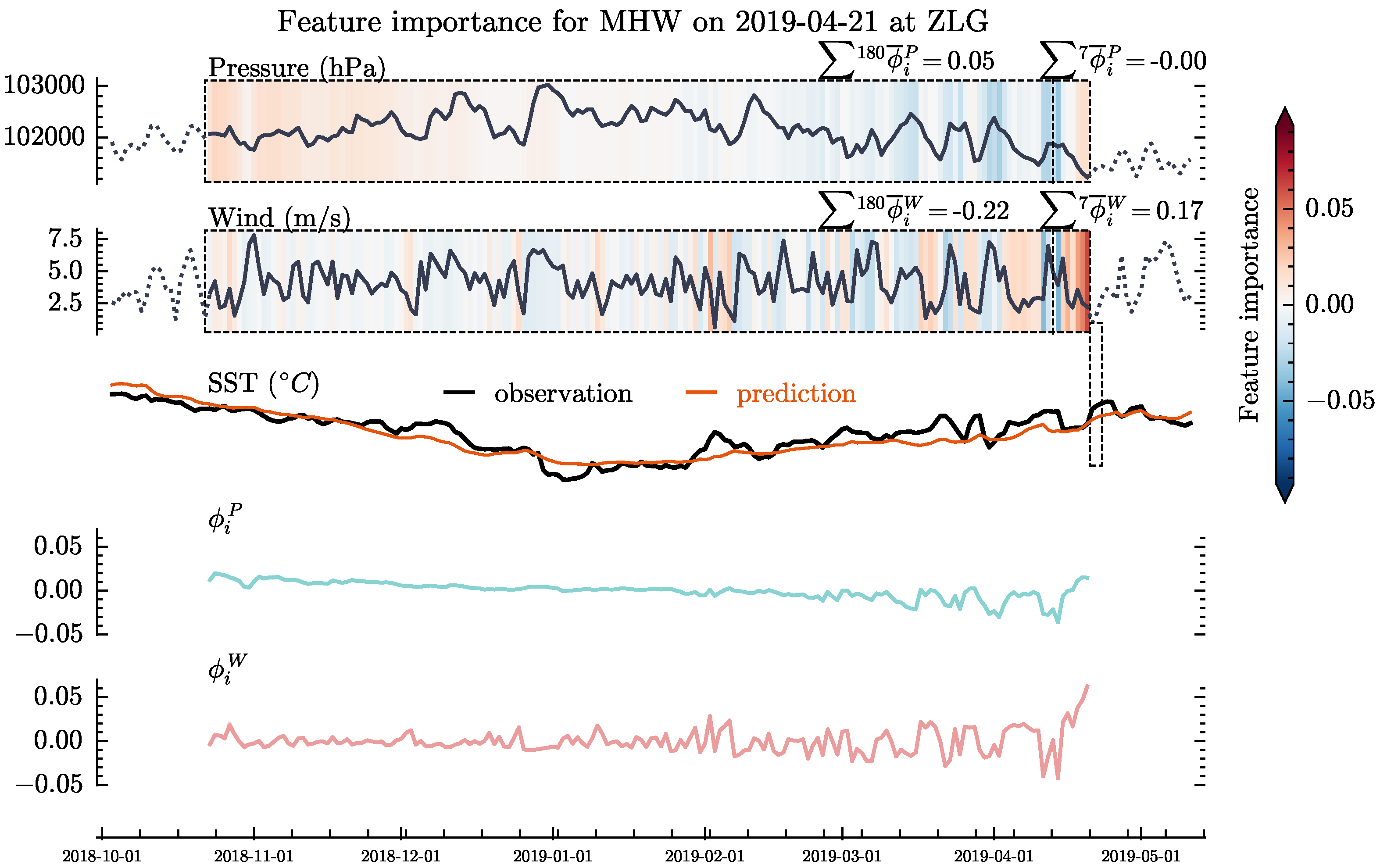
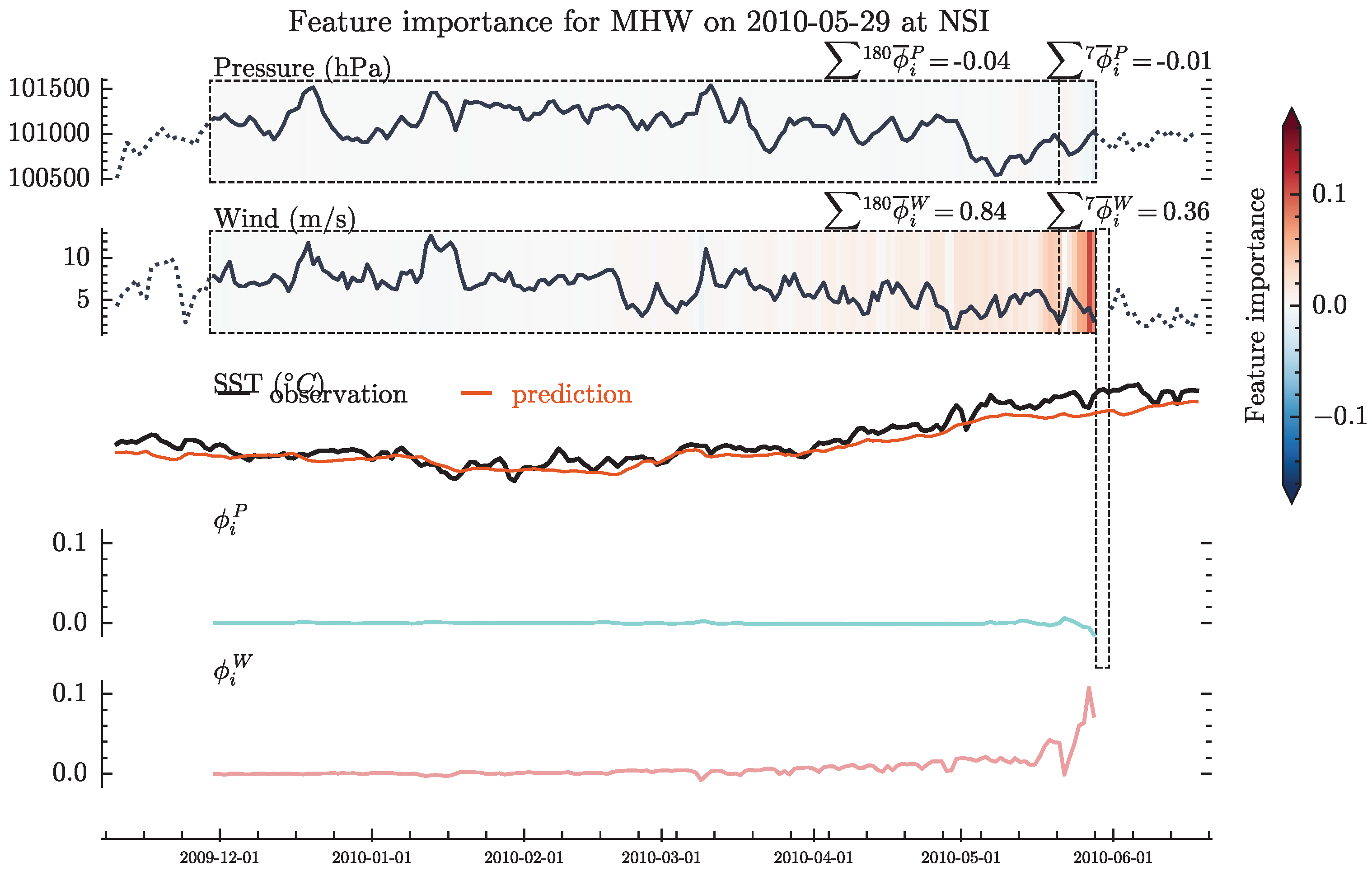
3.3. Interpreted Ocean Mechanisms
3.4. Decomposing Internal Signals of LSTM with AD
4. Discussion
4.1. Interpretation of Results
4.2. Compared with Existing Research
4.3. Limitations of the Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Herring, S.C.; Christidis, N.; Hoell, A.; Stott, P.A. Explaining Extreme Events of 2020 from a Climate Perspective. Bull. Am. Meteorol. Soc. 2022, 103, S1–S129. [Google Scholar] [CrossRef]
- Pearce, A.F.; Feng, M. The rise and fall of the “marine heat wave” off Western Australia during the summer of 2010/2011. J. Mar. Syst. 2013, 111–112, 139–156. [Google Scholar] [CrossRef]
- Frölicher, T.L.; Fischer, E.M.; Gruber, N. Marine heatwaves under global warming. Nature 2018, 560, 360–364. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Wang, C. Marine heatwaves and cold-spells in global coral reef zones. Prog. Oceanogr. 2022, 209, 102920. [Google Scholar] [CrossRef]
- Fredston, A.L.; Cheung, W.W.L.; Frölicher, T.L.; Kitchel, Z.J.; Maureaud, A.A.; Thorson, J.T.; Auber, A.; Mérigot, B.; Palacios-Abrantes, J.; Palomares, M.L.D.; et al. Marine heatwaves are not a dominant driver of change in demersal fishes. Nature 2023, 621, 324–329. [Google Scholar] [CrossRef]
- Masson-Delmotte, V.; Zhai, P.; Pirani, A.; Connors, S.L.; Péan, C.; Berger, S.; Caud, N.; Chen, Y.; Goldfarb, L.; Gomis, M.I. Climate change 2021: The physical science basis. In Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2021; Volume 2. [Google Scholar]
- Hu, S.; Sprintall, J.; Guan, C.; McPhaden, M.J.; Wang, F.; Hu, D.; Cai, W. Deep-reaching acceleration of global mean ocean circulation over the past two decades. Sci. Adv. 2020, 6, eaax7727. [Google Scholar] [CrossRef] [PubMed]
- Hu, S.; Lu, X.; Li, S.; Wang, F.; Guan, C.; Hu, D.; Xin, L.; Ma, J. Multi-decadal trends in the tropical Pacific western boundary currents retrieved from historical hydrological observations. Sci. China Earth Sci. 2021, 64, 600–610. [Google Scholar] [CrossRef]
- Shi, J.R.; Talley, L.D.; Xie, S.P.; Peng, Q.; Liu, W. Ocean warming and accelerating Southern Ocean zonal flow. Nat. Clim. Chang. 2021, 11, 1090–1097. [Google Scholar] [CrossRef]
- Balaguru, K.; Foltz, G.R.; Leung, L.R.; Emanuel, K.A. Global warming-induced upper-ocean freshening and the intensification of super typhoons. Nat. Commun. 2016, 7, 13670. [Google Scholar] [CrossRef]
- Martínez-Moreno, J.; Hogg, A.M.; England, M.H.; Constantinou, N.C.; Kiss, A.E.; Morrison, A.K. Global changes in oceanic mesoscale currents over the satellite altimetry record. Nat. Clim. Chang. 2021, 11, 397–403. [Google Scholar] [CrossRef]
- Hobday, A.J.; Alexander, L.V.; Perkins, S.E.; Smale, D.A.; Straub, S.C.; Oliver, E.C.; Benthuysen, J.A.; Burrows, M.T.; Donat, M.G.; Feng, M.; et al. A hierarchical approach to defining marine heatwaves. Prog. Oceanogr. 2016, 141, 227–238. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N.; Prabhat. Deep learning and process understanding for data-driven Earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Wang, H.; Dong, J.; Zhong, G.; Sun, X. Prediction of Sea Surface Temperature Using Long Short-Term Memory. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1745–1749. [Google Scholar] [CrossRef]
- Ham, Y.G.; Kim, J.H.; Luo, J.J. Deep learning for multi-year ENSO forecasts. Nature 2019, 573, 568–572. [Google Scholar] [CrossRef]
- Ham, Y.G.; Kim, J.H.; Kim, E.S.; On, K.W. Unified deep learning model for El Niño/Southern Oscillation forecasts by incorporating seasonality in climate data. Sci. Bull. 2021, 66, 1358–1366. [Google Scholar] [CrossRef]
- Prasad, A.; Sharma, S.; Agarwal, H. Forecasting Marine Heatwaves Using Machine Learning. 2022; preprint. [Google Scholar] [CrossRef]
- Liang, Y.; Li, S.; Yan, C.; Li, M.; Jiang, C. Explaining the black-box model: A survey of local interpretation methods for deep neural networks. Neurocomputing 2021, 419, 168–182. [Google Scholar] [CrossRef]
- Samek, W.; Müller, K.R. Towards Explainable Artificial Intelligence. In Explainable AI: Interpreting, Explaining and Visualizing Deep Learning; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11700, pp. 5–22. ISBN 9783030289539. [Google Scholar] [CrossRef]
- Adadi, A.; Berrada, M. Peeking Inside the Black-Box: A Survey on Explainable Artificial Intelligence (XAI). IEEE Access 2018, 6, 52138–52160. [Google Scholar] [CrossRef]
- Guidotti, R.; Monreale, A.; Ruggieri, S.; Turini, F.; Giannotti, F.; Pedreschi, D. A Survey of Methods for Explaining Black Box Models. ACM Comput. Surv. 2019, 51, 1–42. [Google Scholar] [CrossRef]
- Arras, L.; Arjona-Medina, J.; Widrich, M.; Montavon, G.; Gillhofer, M.; Müller, K.R.; Hochreiter, S.; Samek, W. Explaining and Interpreting LSTMs. In Explainable AI: Interpreting, Explaining and Visualizing Deep Learning; Springer International Publishing: Cham, Switzerland, 2019; Volume 11700, pp. 211–238. ISBN 9783030289539. [Google Scholar] [CrossRef]
- Ming, Y.; Cao, S.; Zhang, R.; Li, Z.; Chen, Y.; Song, Y.; Qu, H. Understanding Hidden Memories of Recurrent Neural Networks. In Proceedings of the 2017 IEEE Conference on Visual Analytics Science and Technology (VAST), Phoenix, AZ, USA, 3–6 October 2017; pp. 13–24. [Google Scholar] [CrossRef]
- Strobelt, H.; Gehrmann, S.; Pfister, H.; Rush, A.M. LSTMVis: A Tool for Visual Analysis of Hidden State Dynamics in Recurrent Neural Networks. IEEE Trans. Vis. Comput. Graph. 2018, 24, 667–676. [Google Scholar] [CrossRef]
- Jiang, S.; Zheng, Y.; Wang, C.; Babovic, V. Uncovering Flooding Mechanisms Across the Contiguous United States Through Interpretive Deep Learning on Representative Catchments. Water Resour. Res. 2022, 58, e2021WR030185. [Google Scholar] [CrossRef]
- Erion, G.; Janizek, J.D.; Sturmfels, P.; Lundberg, S.M.; Lee, S.I. Improving performance of deep learning models with axiomatic attribution priors and expected gradients. Nat. Mach. Intell. 2021, 3, 620–631. [Google Scholar] [CrossRef]
- Du, M.; Liu, N.; Yang, F.; Ji, S.; Hu, X. On Attribution of Recurrent Neural Network Predictions via Additive Decomposition. In Proceedings of the The World Wide Web Conference, San Francisco, CA, USA, 13–17 May 2019; pp. 383–393. [Google Scholar] [CrossRef]
- Reynolds, R.W.; Smith, T.M.; Liu, C.; Chelton, D.B.; Casey, K.S.; Schlax, M.G. Daily High-Resolution-Blended Analyses for Sea Surface Temperature. J. Clim. 2007, 20, 5473–5496. [Google Scholar] [CrossRef]
- Hersbach, H.; Rosnay, P.; Schepers, D.; Simmons, A.; Soci, C.; Abdalla, S.; Alonso, M.; Balmaseda; Balsamo, G.; Bechtold, P.; et al. Operational Global Reanalysis: Progress, Future Directions and Synergies with NWP. 2018. Available online: https://www.ecmwf.int/en/elibrary/80922-operational-global-reanalysis-progress-future-directions-and-synergies-nwp (accessed on 22 July 2023).
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Oliver, E.C.; Benthuysen, J.A.; Darmaraki, S.; Donat, M.G.; Hobday, A.J.; Holbrook, N.J.; Schlegel, R.W.; Sen Gupta, A. Marine Heatwaves. Annu. Rev. Mar. Sci. 2021, 13, 313–342. [Google Scholar] [CrossRef]
- Sorte, C.J.B.; Fuller, A.; Bracken, M.E.S. Impacts of a simulated heat wave on composition of a marine community. Oikos 2010, 119, 1909–1918. [Google Scholar] [CrossRef]
- Marbà, N.; Jordà, G.; Agustí, S.; Girard, C.; Duarte, C.M. Footprints of climate change on Mediterranean Sea biota. Front. Mar. Sci. 2015, 2, 56. [Google Scholar] [CrossRef]
- Sundararajan, M.; Taly, A.; Yan, Q. Axiomatic Attribution for Deep Networks. 2017. Available online: https://proceedings.mlr.press/v70/sundararajan17a.html (accessed on 5 August 2023).
- Lundberg, S.M.; Lee, S.I. A Unified Approach to Interpreting Model Predictions. arXiv 2017, arXiv:1705.07874. [Google Scholar]
- Petitjean, F.; Ketterlin, A.; Gançarski, P. A global averaging method for dynamic time warping, with applications to clustering. Pattern Recognit. 2011, 44, 678–693. [Google Scholar] [CrossRef]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 43–49. [Google Scholar] [CrossRef]
- Kodinariya, T.M.; Makwana, P.R. Review on Determining Number of Cluster in K-Means Clustering. 2013. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwixl772rM2DAxWHrlYBHU61CqoQFnoECBAQAQ&url=https%3A%2F%2Fwww.researchgate.net%2Fpublication%2F313554124_Review_on_Determining_of_Cluster_in_K-means_Clustering&usg=AOvVaw2JyAR0vGsATkPM3GUEmzSW&opi=89978449 (accessed on 5 August 2023).
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Murdoch, W.J.; Singh, C.; Kumbier, K.; Abbasi-Asl, R.; Yu, B. Definitions, methods, and applications in interpretable machine learning. Proc. Natl. Acad. Sci. USA 2019, 116, 22071–22080. [Google Scholar] [CrossRef] [PubMed]
- Hu, S.; Li, S. Progress and prospect of marine heatwave study. Adv. Earth Sci. 2022, 37, 51–64. [Google Scholar] [CrossRef]
- Hu, S.; Li, S.; Zhang, Y.; Guan, C.; Du, Y.; Feng, M.; Ando, K.; Wang, F.; Schiller, A.; Hu, D. Observed strong subsurface marine heatwaves in the tropical western Pacific Ocean. Environ. Res. Lett. 2021, 16, 104024. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, C. Variations in Summer Marine Heatwaves in the South China Sea. J. Geophys. Res. Ocean. 2021, 126. [Google Scholar] [CrossRef]
- Qi, Q.; Cai, R. Analysis on climate characteristics of sea surface temperature extremes in coastal China seas. Acta Oceanol. Sin. 2019, 41, 36–51. [Google Scholar]
- Wang, A.; Wang, H.; Fan, W.; Luo, J.; Li, W.; Xu, S. Study on characteristics of marine heatwave in the China offshore in 2019. Acta Oceanol. Sin. 2021, 43, 35–44. [Google Scholar]
- Fang, G.; Chen, H.; Wei, Z.; Wang, Y.; Wang, X.; Li, C. Trends and interannual variability of the South China Sea surface winds, surface height, and surface temperature in the recent decade. J. Geophys. Res. Ocean. 2006, 111, C11. [Google Scholar] [CrossRef]
- Xie, S.P. Summer upwelling in the South China Sea and its role in regional climate variations. J. Geophys. Res. 2003, 108, 3261. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, L. Evolution of marine ranching policies in China: Review, performance and prospects. Sci. Total. Environ. 2020, 737, 139782. [Google Scholar] [CrossRef]
- Mohankumar, A.K.; Nema, P.; Narasimhan, S.; Khapra, M.M.; Srinivasan, B.V.; Ravindran, B. Towards Transparent and Explainable Attention Models. In Proceedings of the 58th Annual Meeting of the Association for Computational Linguistics, Online, 5–10 July 2020; Association for Computational Linguistics: Stroudsburg, PA, USA, 2020; pp. 4206–4216. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Analyzed | Data Set | Institute | Spatial Resolution | Period Coverd | Reference | Webstation |
|---|---|---|---|---|---|---|
| SST | OISST | NOAA ESRL | 1982–2020 | Reynolds et al. [28] | https://www.esrl.noaa.gov/psd, accessed on 20 July 2023 | |
| MSLP, 10 m wind speed | ERA5 | ECMWF | 1982–2020 | Hersbach et al. [29] | https://www.ecmwf.int/en/forecasts/datasets/reanalysis-datasets/era5, accessed on 20 July 2023 |
| Station | Latitude | Longitude | Mean Pressure (Pa) | Mean Wind Speed (m/s) | Mean SST (C) |
|---|---|---|---|---|---|
| Xiao Chang Shan (XCS) | 39.2 N | 122.7 E | 101,588.068 | 4.883 | 13.023 |
| Lao Hu Tan (LHT) | 38.9 N | 121.7 E | 101,596.832 | 4.302 | 13.175 |
| Zhi Fu Dao (ZFD) | 37.6 N | 121.4 E | 101,612.341 | 3.554 | 13.637 |
| Lian Yun Gang (LYG) | 34.8 N | 119.4 E | 101,620.127 | 3.463 | 15.472 |
| Lv Si (LSI) | 32.1 N | 121.6 E | 101,578.760 | 3.635 | 16.509 |
| Sheng Shan (SSN) | 30.8 N | 122.8 E | 101,548.275 | 5.869 | 18.484 |
| Da Chen (DCN) | 28.5 N | 121.9 E | 101,501.948 | 5.988 | 19.446 |
| Dong Shan (DSN) | 23.8 N | 117.5 E | 101,296.689 | 4.523 | 22.230 |
| Nan Ji (NJI) | 27.5 N | 121.1 E | 101,474.890 | 6.058 | 20.281 |
| Bei Shuang (BSG) | 26.7 N | 120.3 E | 101,443.244 | 5.337 | 20.814 |
| Zhe Lang (ZLG) | 22.7 N | 115.6 E | 101,238.041 | 3.938 | 24.022 |
| Beibu Gulf (BBG) | 20.62 N | 109.37 E | 101,060.593 | 5.225 | 25.244 |
| Nansha Islands (NSI) | 10.62 N | 114.62 E | 100,924.856 | 6.104 | 28.399 |
| Index | Symbol or Formula | Unit |
|---|---|---|
| Climatology | C | |
| Threshold | C | |
| Start and end of MHWs | days | |
| Duration | days | |
| Intensity(max/mean/variance) | C |
| Exp | Metric | Station | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BBG | BSG | DCN | DSN | LHT | LSI | LYG | NJI | NSI | SSN | XCS | ZFD | ZLG | ||
| No. 1 | MSE | 0.082 | 0.053 | 0.046 | 0.060 | 0.037 | 0.042 | 0.039 | 0.053 | 0.229 | 0.038 | 0.034 | 0.034 | 0.075 |
| RMSE | 0.286 | 0.231 | 0.215 | 0.245 | 0.193 | 0.202 | 0.195 | 0.230 | 0.478 | 0.194 | 0.184 | 0.182 | 0.274 | |
| No. 2 | MSE | 0.079 | 0.055 | 0.053 | 0.065 | 0.040 | 0.045 | 0.041 | 0.051 | 0.208 | 0.039 | 0.064 | 0.032 | 0.082 |
| RMSE | 0.281 | 0.233 | 0.229 | 0.254 | 0.197 | 0.206 | 0.199 | 0.226 | 0.456 | 0.197 | 0.248 | 0.178 | 0.287 | |
| No. 3 | MSE | 0.073 | 0.047 | 0.056 | 0.061 | 0.038 | 0.034 | 0.051 | 0.054 | 0.233 | 0.048 | 0.038 | 0.051 | 0.083 |
| RMSE | 0.270 | 0.217 | 0.234 | 0.246 | 0.192 | 0.181 | 0.219 | 0.230 | 0.483 | 0.217 | 0.190 | 0.217 | 0.288 | |
| No. 4 | MSE | 0.074 | 0.047 | 0.044 | 0.063 | 0.042 | 0.051 | 0.039 | 0.050 | 0.222 | 0.039 | 0.034 | 0.024 | 0.080 |
| RMSE | 0.271 | 0.217 | 0.209 | 0.250 | 0.201 | 0.222 | 0.191 | 0.224 | 0.471 | 0.198 | 0.182 | 0.155 | 0.283 | |
| Clustering Categories | Num |
|---|---|
| Cluster 1 | 54 |
| Cluster 2 | 211 |
| Cluster 3 | 235 |
| Cluster 4 | 318 |
| Cluster 5 | 316 |
| Total | 1134 |
| Research | Data and Model | Pattern | ||||
|---|---|---|---|---|---|---|
| Pattern 1 | Pattern 2 | Pattern 3 | Pattern 4 | Pattern 5 | ||
| Hu et al. [43] | Reanalysis Data and Numerical Model | ✔ | ||||
| Yao and Wang [44] | Reanalysis Data and Numerical Model | ✔ | ✔ | |||
| Qi and Cai [45] | Reanalysis Data and Numerical Model | ✔ | ||||
| Wang et al. [46] | Reanalysis Data and Numerical Model | ✔ | ✔ | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Q.; Zhu, Z.; Zhao, D.; Song, W.; Huang, D. An Interpretable Deep Learning Approach for Detecting Marine Heatwaves Patterns. Appl. Sci. 2024, 14, 601. https://doi.org/10.3390/app14020601
He Q, Zhu Z, Zhao D, Song W, Huang D. An Interpretable Deep Learning Approach for Detecting Marine Heatwaves Patterns. Applied Sciences. 2024; 14(2):601. https://doi.org/10.3390/app14020601
Chicago/Turabian StyleHe, Qi, Zihang Zhu, Danfeng Zhao, Wei Song, and Dongmei Huang. 2024. "An Interpretable Deep Learning Approach for Detecting Marine Heatwaves Patterns" Applied Sciences 14, no. 2: 601. https://doi.org/10.3390/app14020601
APA StyleHe, Q., Zhu, Z., Zhao, D., Song, W., & Huang, D. (2024). An Interpretable Deep Learning Approach for Detecting Marine Heatwaves Patterns. Applied Sciences, 14(2), 601. https://doi.org/10.3390/app14020601