
Energy-Saving Breakthrough in the Point-to-Point Control of a Flexible Manipulator


Abstract
:1. Introduction
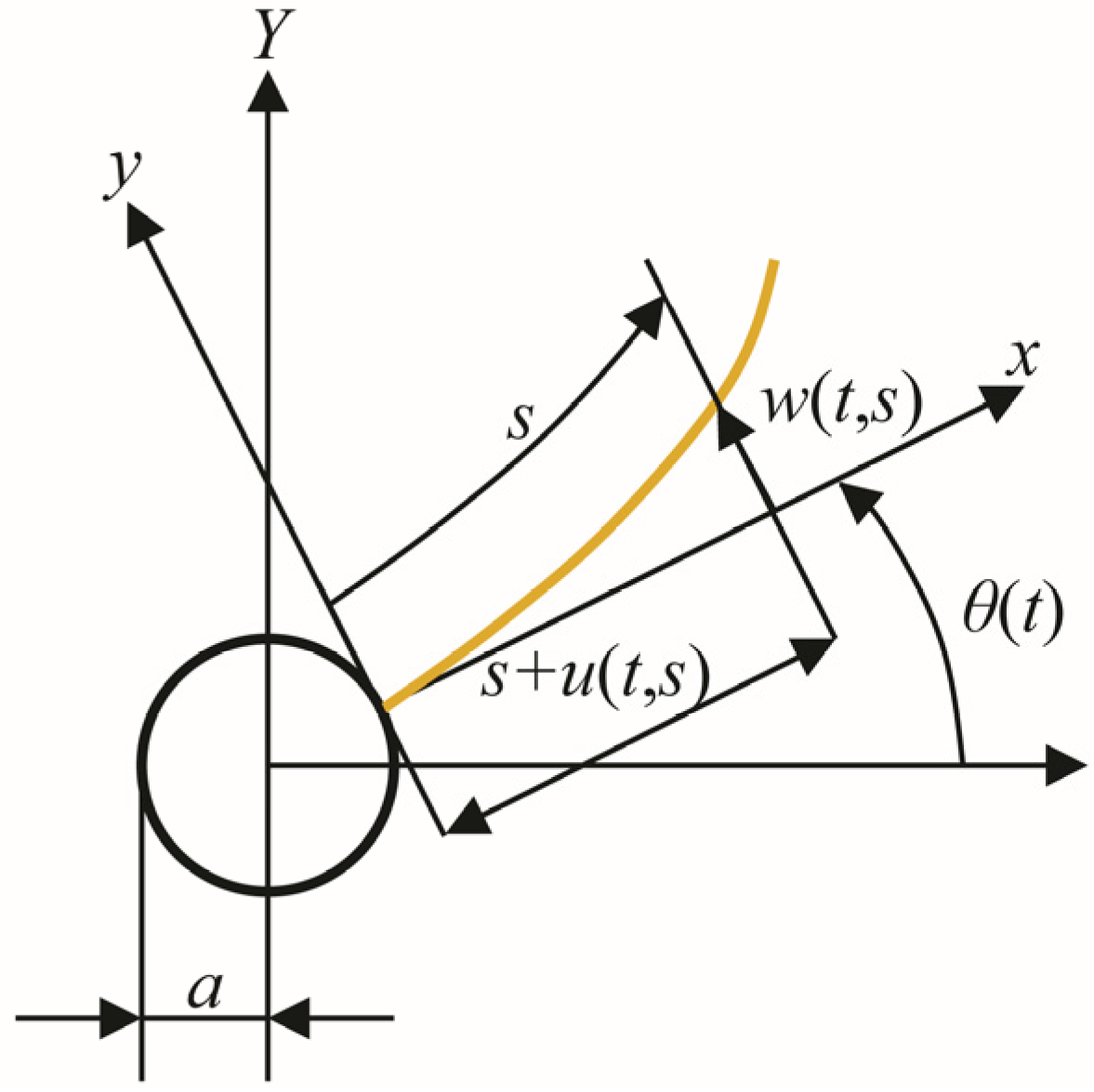
2. Single-Link Flexible Manipulator
2.1. Experimental Setup
2.2. Equations of Motion
3. Relationship between Initial Deflection and Drive Energy
4. Trajectory Planning Method Focused on Flexibility Characteristics
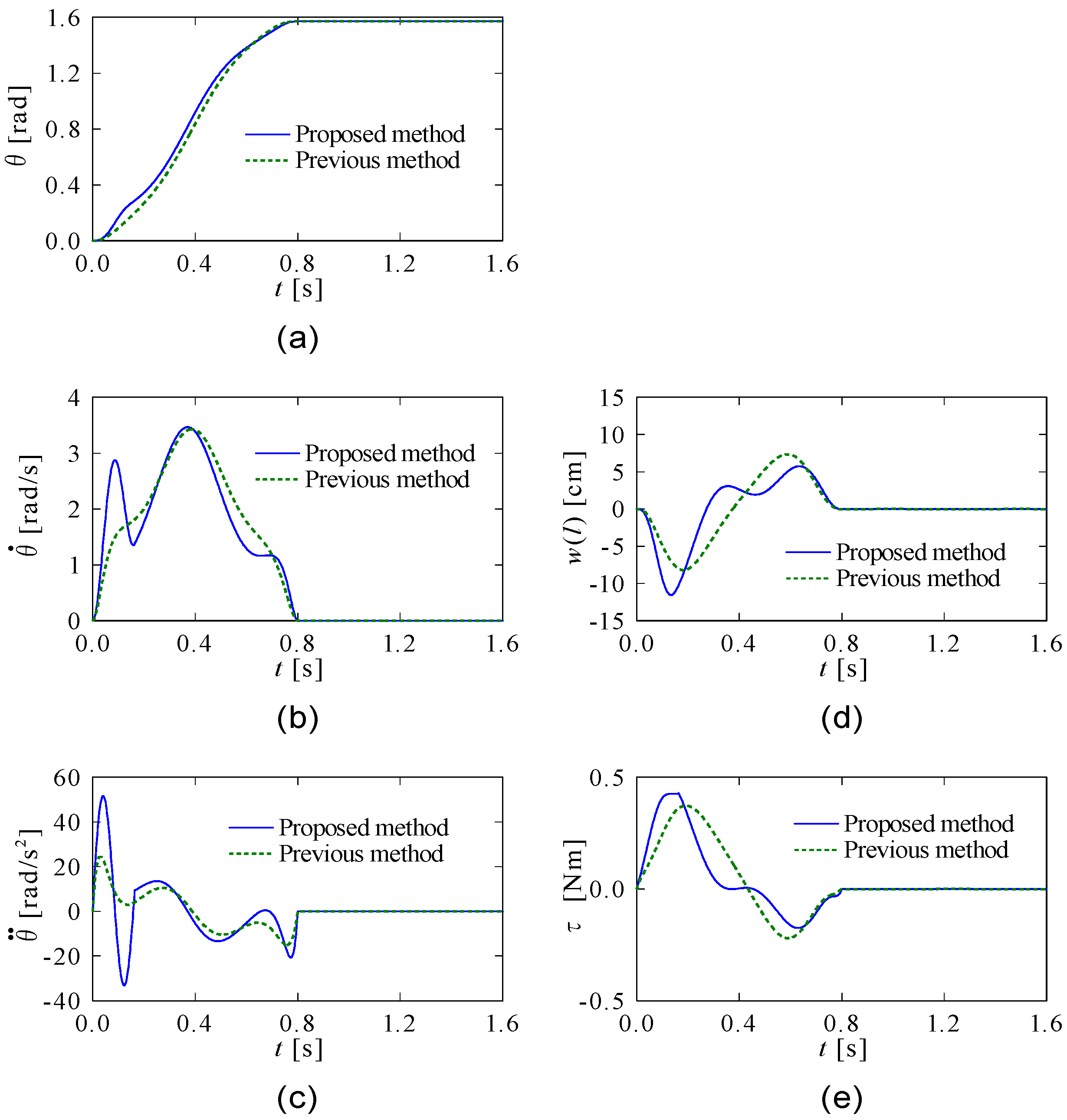
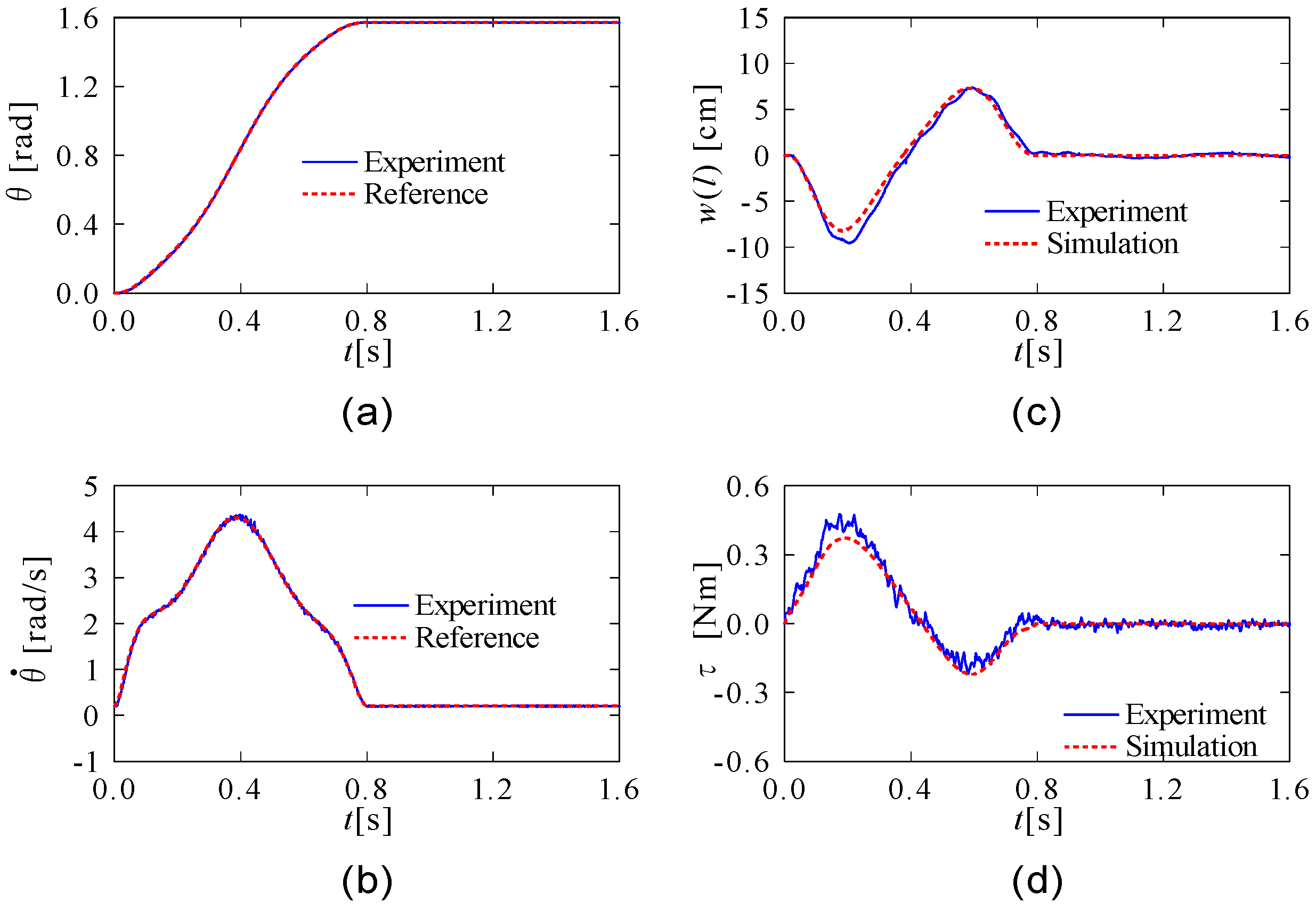
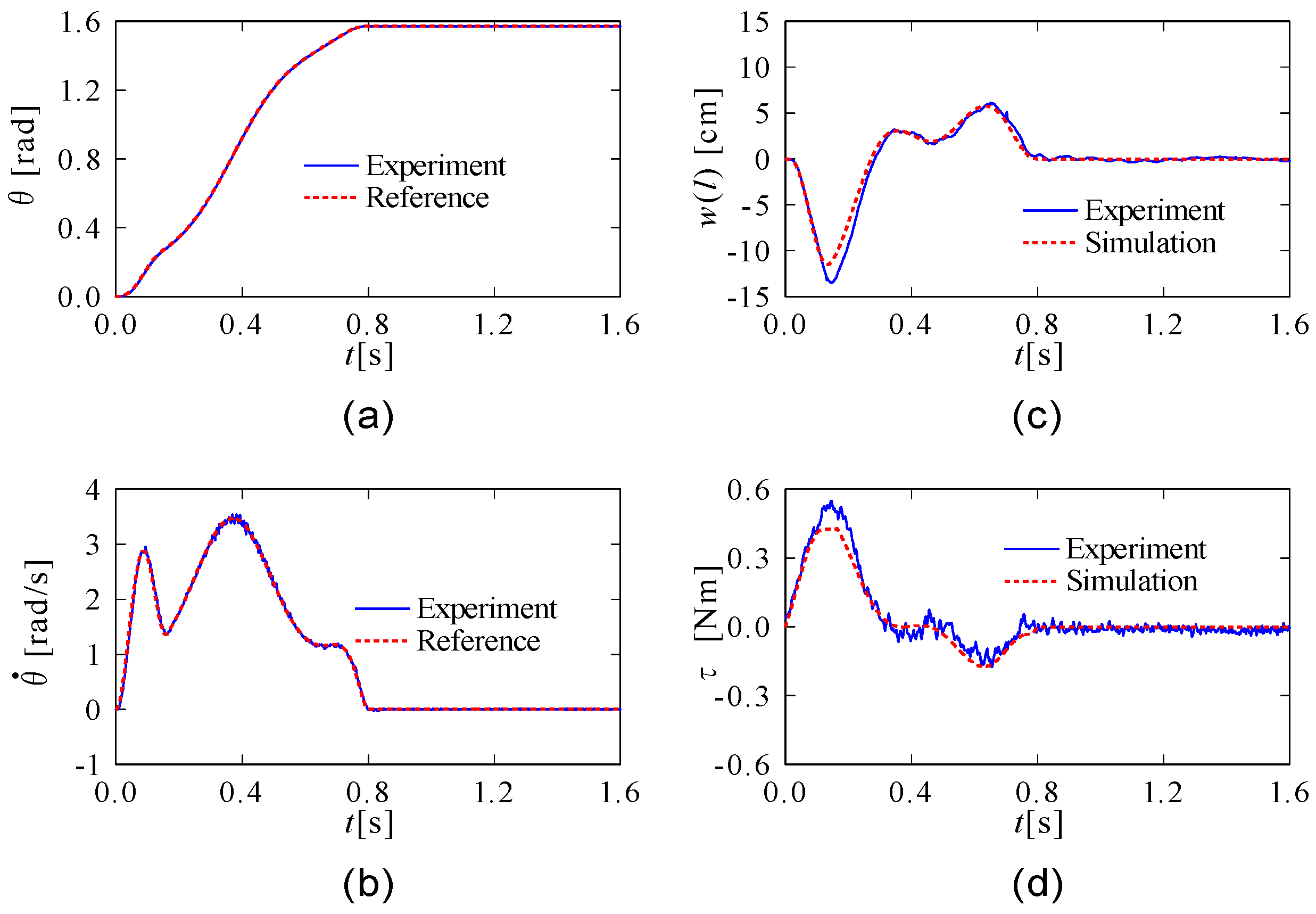
5. Simulation and Experimental Results
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| θE [rad] | TE [s] | θ0 | T0 | a1 | a2 | a3 | a4 |
|---|---|---|---|---|---|---|---|
| π/2 | 0.8 | 1.741 × 10−1 | 1.644 × 10−1 | 1.672 × 10−2 | −1.401 × 10−2 | −9.818 × 10−2 | −3.069 × 10−1 |
| π/4 | 0.7 | 1.591 × 10−1 | 1.813 × 10−1 | −3.666 × 10−2 | 7.198 × 10−2 | −3.034 × 10−1 | −2.686 × 10−1 |
| π/6 | 0.6 | 1.309 × 10−1 | 1.688 × 10−1 | −6.456 × 10−2 | 6.375 ×10−2 | −3.997 × 10−1 | −1.309 × 10−1 |
| θE [rad] | TE [s] | a1 | a2 | a3 | a4 | a5 | a6 |
|---|---|---|---|---|---|---|---|
| π/2 | 0.8 | 1.622 × 10−2 | −6.449 × 10−2 | 2.813 × 10−2 | −2.859 × 10−1 | 6.359 × 10−2 | 3.733 × 10−2 |
| π/4 | 0.7 | 1.261 × 10−2 | −1.084 × 10−1 | 4.721 × 10−2 | −2.348 × 10−1 | −3.868 × 10−2 | −1.834 × 10−1 |
| π/6 | 0.6 | 1.197 × 10−2 | −1.666 × 10−1 | 9.232 × 10−2 | −3.002 × 10−1 | −2.920 × 10−1 | 6.456 × 10−2 |


Appendix B
| θE [rad] | TE [s] | θ0 | T0 | a1 | a2 | a3 | a4 |
|---|---|---|---|---|---|---|---|
| π/6 | 0.8 | 1.150 × 10−1 | 2.279 × 10−1 | −4.718 × 10−2 | −6.422 × 10−2 | −3.702 × 10−1 | −1.136 × 10−1 |
| π/2 | 1.0 | 1.865 × 10−1 | 2.601 × 10−1 | −4.564 × 10−3 | 6.426 × 10−3 | −1.281 × 10−1 | −3.045 × 10−1 |
| π/2 | 1.0 | 8.355 × 10−2 | 2.405 × 10−1 | 3.046 × 10−2 | −4.206 × 10−2 | −4.232 × 10−2 | −2.388 × 10−1 |



References
- Benosman, M.; Vey, L.G. Control of flexible manipulators: A survey. Robotica 2004, 22, 535–545. [Google Scholar] [CrossRef]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Rahimi, H.N.; Nazemizadeh, M. Dynamic analysis and intelligent control techniques for flexible manipulators: A review. Adv. Rob. 2014, 28, 63–76. [Google Scholar] [CrossRef]
- Kiang, C.T.; Spowage, A.; Yoong, C.K. Review of control and sensor system of flexible manipulator. J. Intell. Robot. Syst. 2015, 77, 187–213. [Google Scholar] [CrossRef]
- Lochan, K.; Roy, B.K.; Subudhi, B. A review on two-link flexible manipulators. Annu. Rev. Control 2016, 42, 346–367. [Google Scholar] [CrossRef]
- Alandoli, E.A.; Lee, T. A critical review of control techniques for flexible and rigid link manipulators. Robotica 2020, 38, 2239–2265. [Google Scholar] [CrossRef]
- Abe, A. Trajectory planning for residual vibration suppression of a two-link rigid-flexible manipulator considering large deformation. Mech. Mach. Theory 2009, 44, 1627–1639. [Google Scholar] [CrossRef]
- Abe, A. Trajectory planning for flexible Cartesian robot manipulator by using artificial neural network: Numerical simulation and experimental verification. Robotica 2011, 29, 797–804. [Google Scholar] [CrossRef]
- Park, K.J.; Park, Y.S. Fourier-based optimal design of a flexible manipulator path to reduce residual vibration of the endpoint. Robotica 1993, 11, 263–272. [Google Scholar] [CrossRef]
- Meirovitch, L.; Chen, Y. Trajectory and control optimization for flexible space robots. J. Guid. Contr. Dyn. 1995, 18, 493–502. [Google Scholar] [CrossRef]
- Pond, B.; Sharf, I. Experimental evaluation of flexible manipulator trajectory optimization. J. Guid. Contr. Dyn. 2001, 24, 834–843. [Google Scholar] [CrossRef]
- Park, K.J. Path design of redundant flexible robot manipulators to reduce residual vibration in the presence of obstacles. Robotica 2003, 21, 335–340. [Google Scholar] [CrossRef]
- Pond, B.; Vliet, J.V.; Sharf, I. Prediction tools for active damping and motion planning of flexible manipulators. J. Guid. Contr. Dyn. 2003, 26, 267–272. [Google Scholar] [CrossRef]
- Benosman, M.; Vey, G.L.; Lanari, L.; Luca, A.D. Rest-to-rest motion for planar multi-link flexible manipulator through backward recursion. J. Dyn. Syst. Meas. Contr. 2004, 126, 115–123. [Google Scholar] [CrossRef]
- Park, K.J. Flexible robot manipulator path design to reduce the endpoint residual vibration under torque constraints. J. Sound Vib. 2004, 275, 1051–1068. [Google Scholar] [CrossRef]
- Kojima, H.; Hiruma, T. Evolutionary learning acquisition of optimal joint angle trajectories of flexible robot arm. J. Robot. Mechatron. 2006, 18, 103–110. [Google Scholar] [CrossRef]
- Ramos, F.; Feliu, V.; Payo, I. Design of trajectories with physical constraints for very lightweight single link flexible arms. J. Vib. Contr. 2008, 14, 1091–1110. [Google Scholar] [CrossRef]
- Korayem, M.H.; Nikoobin, A.; Azimirad, V. Trajectory optimization of flexible link manipulators in point-to-point motion. Robotica 2009, 27, 825–840. [Google Scholar] [CrossRef]
- Choi, Y.; Cheong, J.; Moon, H. A trajectory planning method for output tracking of linear flexible systems using exact equilibrium manifolds. IEEE/ASME Trans. Mechatron. 2010, 15, 819–826. [Google Scholar] [CrossRef]
- Yihuan, L.; Daokui, L.; Guojin, T. Motion planning for vibration reducing of free-floating redundant manipulators based on hybrid optimization approach. Chin. J. Aeronaut. 2011, 24, 533–540. [Google Scholar]
- Korayem, M.H.; Rahimi, H.N.; Nikoobin, A. Mathematical modeling and trajectory planning of mobile manipulators with flexible links and joints. Appl. Math. Model. 2012, 36, 3229–3244. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A. Model-based trajectory planning for flexible-link mechanisms with bounded jerk. Robot. Comput. Integr. Manuf. 2013, 29, 90–99. [Google Scholar] [CrossRef]
- Malgaca, L.; Yavuz, Ş.; Akdağ, M.; Karagülle, H. Residual vibration control of a single-link flexible curved manipulator. Simul. Model. Pract. Theory 2016, 67, 155–170. [Google Scholar] [CrossRef]
- Yang, Y.L.; Wei, Y.D.; Lou, J.Q.; Fu, L.; Zhao, X.W. Nonlinear dynamic analysis and optimal trajectory planning of a high-speed macro-micro manipulator. J. Sound Vib. 2017, 405, 112–132. [Google Scholar] [CrossRef]
- Xin, P.; Rong, J.; Yang, Y.; Xiang, D.; Xiang, Y. Trajectory planning with residual vibration suppression for space manipulator based on particle swarm optimization algorithm. Adv. Mech. Eng. 2017, 9, 1687814017692694. [Google Scholar] [CrossRef]
- Kim, J.; Croft, E.A. Preshaping input trajectories of industrial robots for vibration suppression. Robot. Comput. Integr. Manuf. 2018, 54, 35–44. [Google Scholar] [CrossRef]
- Yoon, H.J.; Chung, S.Y.; Kang, H.S.; Hwang, M.J. Trapezoidal motion profile to suppress vibration of flexible object moved by robot. Electronics 2019, 8, 30. [Google Scholar] [CrossRef]
- Cui, L.; Wang, H.; Chen, W. Trajectory planning of a spatial flexible manipulator for vibration suppression. Robot. Auton. Syst. 2020, 123, 103316. [Google Scholar] [CrossRef]
- Li, Y.Y.; Ge, S.S.; Wei, Q.P.; Gan, T.; Tao, X.L. An online trajectory planning method of a flexible-link manipulator aiming at vibration suppression. IEEE Access 2020, 8, 130616–130632. [Google Scholar] [CrossRef]
- Meng, Q.X.; Lai, X.Z.; Yan, Z.; Wang, Y.W.; Wu, M. Position control with zero residual vibration for two degrees-of-freedom flexible systems based on motion trajectory optimization. Inf. Sci. 2021, 575, 698–713. [Google Scholar] [CrossRef]
- İlman, M.M.; Yavuz, Ş.; Taser, P.Y. Generalized input preshaping vibration control approach for multi-link flexible manipulators using machine intelligence. Mechatronics 2022, 82, 102735. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Optimization of energy consumption in industrial robots, a review. Cognit. Rob. 2023, 3, 142–157. [Google Scholar] [CrossRef]
- Vásárhelyi, J.; Salih, O.M.; Rostum, H.M.; Benotsname, R. An overview of energies problems in robotic systems. Energies 2023, 16, 8060. [Google Scholar] [CrossRef]
- Abe, A.; Kimuro, K. Minimum energy trajectory planning for vibration control of a flexible manipulator using a multi-objective optimisation approach. Int. J. Mechatron. Autom. 2012, 2, 286–294. [Google Scholar] [CrossRef]
- Abe, A. Minimum energy trajectory planning method for robot manipulator mounted on flexible base. In Proceedings of the 9th Asian Control Conference, Istanbul, Turkey, 23–26 June 2013; pp. 1–7. [Google Scholar]
- Mu, H.; Chen, H.; Zhu, Y. Vibration-energy-optimal trajectory planning for flexible servomotor systems with state constraints. IET Control Theory Appl. 2019, 13, 59–68. [Google Scholar] [CrossRef]
- Abe, A. An effective trajectory planning method for simultaneously suppressing residual vibration and energy consumption of flexible structures. Case Stud. Mech. Syst. Signal Process. 2016, 4, 19–27. [Google Scholar] [CrossRef]
- Abe, A.; Hashimoto, K. A novel feedforward control technique for a flexible dual manipulator. Rob. Comput. Integr. Manuf. 2015, 35, 169–177. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evolut. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Tasoulis, D.E.; Vrahatis, M.N. Multiobjective optimization using parallel vector evaluated particle swarm optimization. In Proceedings of the IASTED International Conference on Artificial Intelligence and Applications, Innsbruck, Austria, 16–18 February 2004; pp. 823–828. [Google Scholar]











| Value of the Initial Deflection | ||
|---|---|---|
| w(0, l) = −5 cm | w(0, l) = 0 | w(0, l) = 5 cm |
| 5.28 × 10−2 | 1.05 × 10−1 | 1.60 × 10−1 |
| θE [rad] | TE [s] | Cyc | Previous Method | Proposed Method |
|---|---|---|---|---|
| π/2 | 0.8 | 5.65 × 10−1 (5.59 × 10−1) | 2.98 × 10−1 (2.88 × 10−1) | 2.34 × 10−1 (2.06 × 10−1) |
| π/4 | 0.7 | 1.98 × 10−1 (1.84 × 10−1) | 9.82 × 10−2 (8.57 × 10−2) | 8.06 × 10−2 (6.94 × 10−2) |
| π/6 | 0.6 | 1.18 × 10−1 (1.05 × 10−1) | 6.58 × 10−2 (5.52 × 10−2) | 5.43 × 10−2 (4.85 × 10−2) |
| TE [s] | θE [rad] | Ref. [35] | Proposed Method |
|---|---|---|---|
| 0.8 | π/6 | 5.15 × 10−2 | 3.80 × 10−2 |
| 1.0 | π/2 | 2.96 × 10−1 | 1.94 × 10−1 |
| 1.1 | π/2 | 2.23 × 10−1 | 1.60 × 10−1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abe, A. Energy-Saving Breakthrough in the Point-to-Point Control of a Flexible Manipulator. Appl. Sci. 2024, 14, 1788. https://doi.org/10.3390/app14051788
Abe A. Energy-Saving Breakthrough in the Point-to-Point Control of a Flexible Manipulator. Applied Sciences. 2024; 14(5):1788. https://doi.org/10.3390/app14051788
Chicago/Turabian StyleAbe, Akira. 2024. "Energy-Saving Breakthrough in the Point-to-Point Control of a Flexible Manipulator" Applied Sciences 14, no. 5: 1788. https://doi.org/10.3390/app14051788
APA StyleAbe, A. (2024). Energy-Saving Breakthrough in the Point-to-Point Control of a Flexible Manipulator. Applied Sciences, 14(5), 1788. https://doi.org/10.3390/app14051788