The outcomes of the optimization procedures for three cruise speeds are examined in this section. Using surrogate models for design optimization, optimal solutions are derived and then compared to reference results from SHARPy simulations.
3.1. Case 1: Cruise Speed of 30 m/s
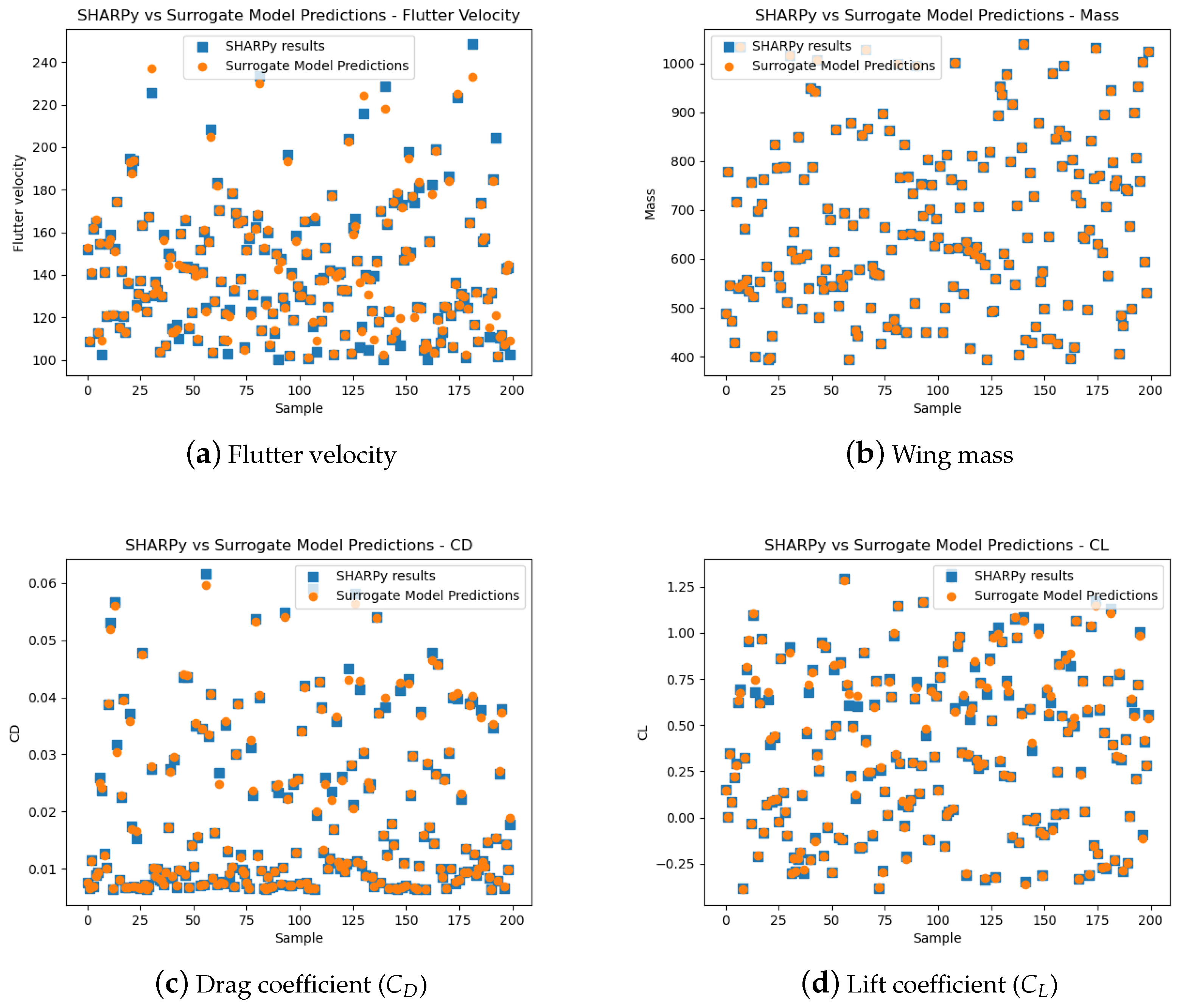
The first cruise speed considered was 30 m/s. Initially, an optimization was performed with a specific set of parameters obtained by tuning, and the solutions were compared with SHARPy simulations. Even though the results were accurate, especially for
,
, and mass, they evidenced discrepancies in flutter velocity estimation as mentioned previously and presented in
Table 2. To solve this problem, the boundaries of the design variables were expanded, as explained in the previous section, adding more data points to improve the accuracy of the prediction. A new optimization with the updated data showed a reduced error for most parameters. The final surrogate models were built based on a dataset of 2500 points with the metrics shown in
Table 3.
However, to further improve accuracy, more computational resources were allocated. Increasing the population size from 180 to 280 and the number of generations from 50 to 200 improved the flutter speed estimation, confining the metric deviations within a 5% margin of error, as can be observed in
Table 4. Yet, this came at the cost of computational efficiency, with a five-fold increase in computational time.
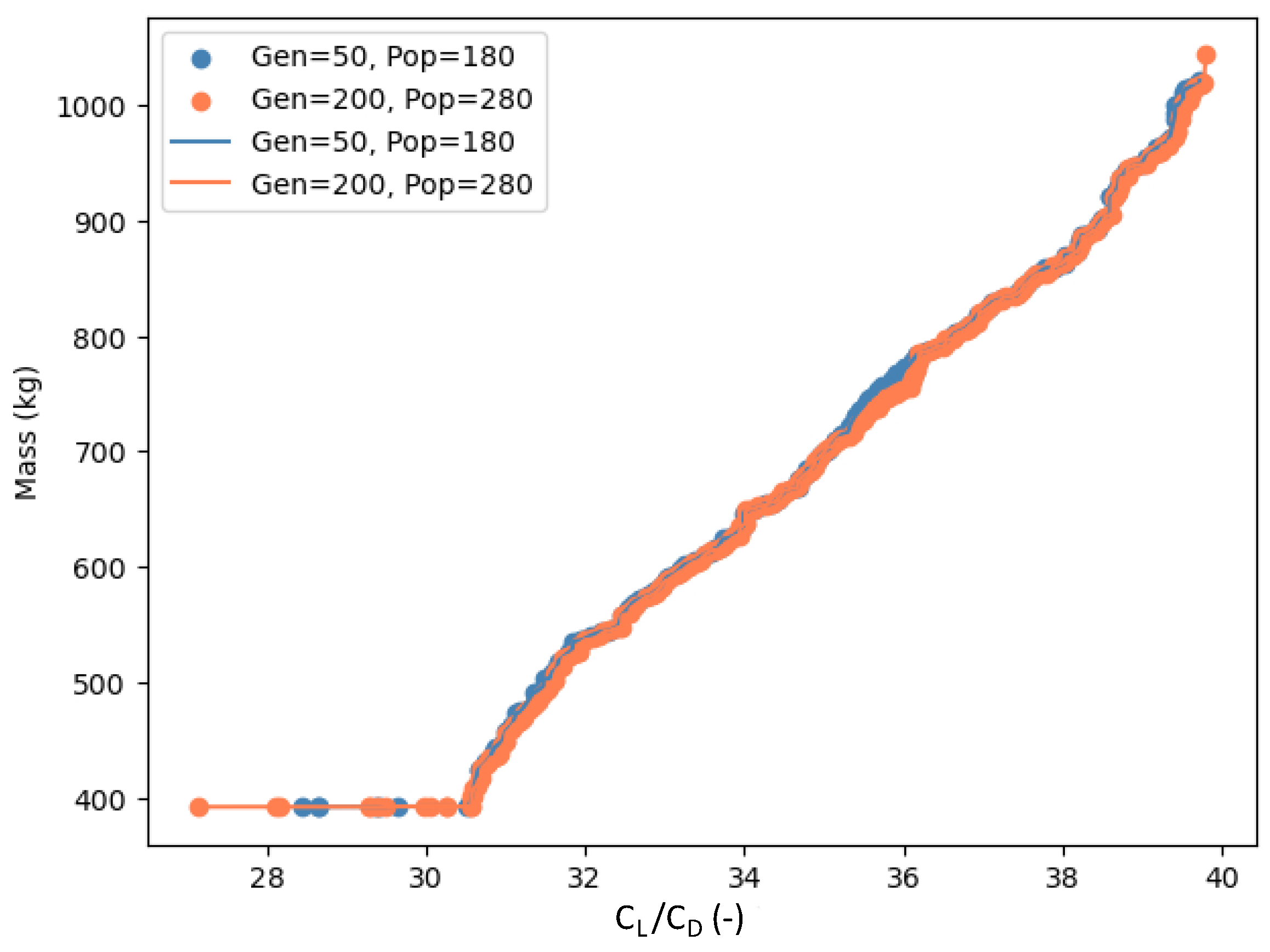
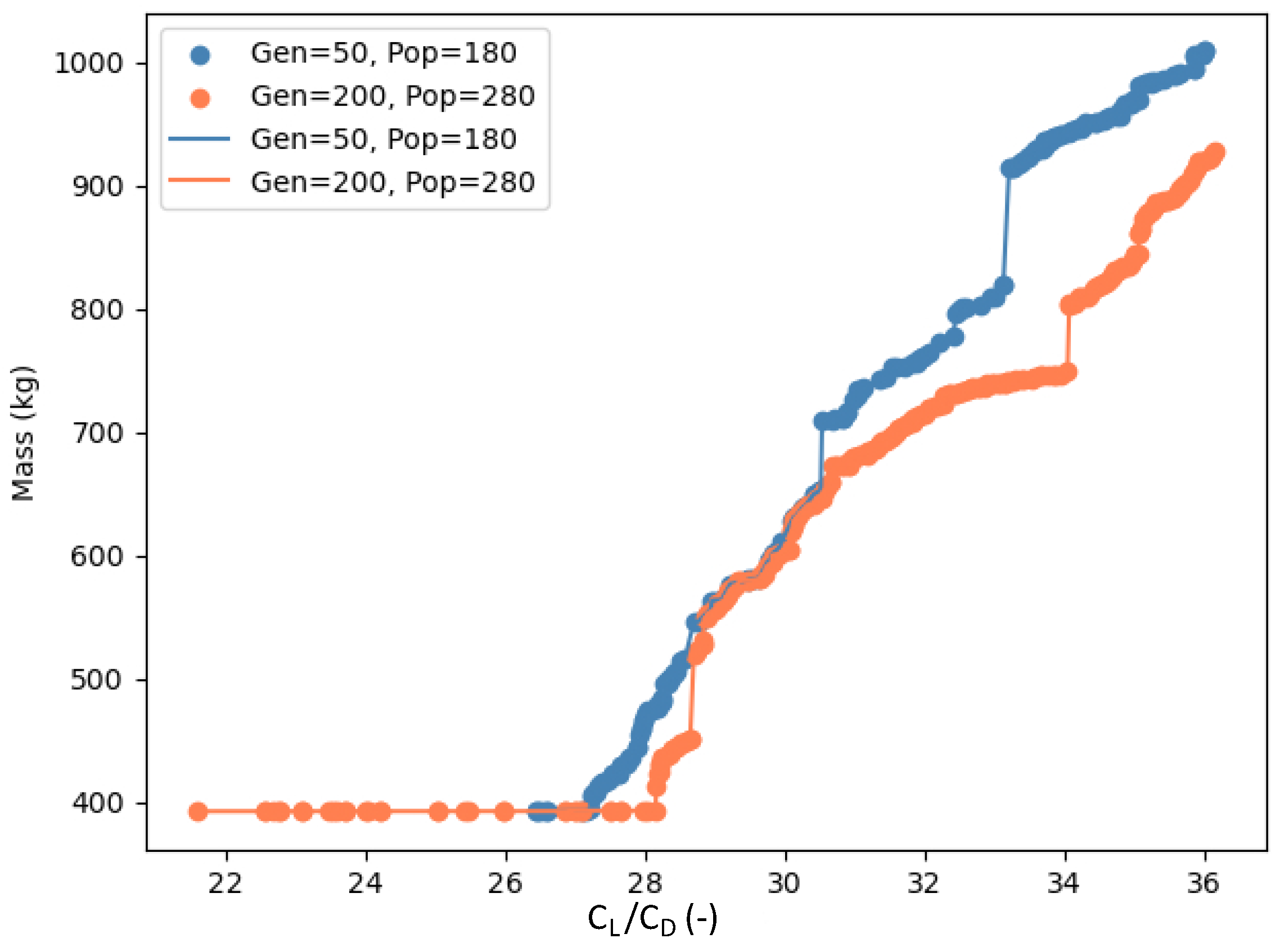
Pareto front analysis revealed trade-offs between the two optimization objectives. The extended configuration covered a wider Pareto range, suggesting its ability to explore a complete solution space and produce better results, particularly toward higher
values, as can be seen in
Figure 5.
Throughout the study, the flutter constraint remained inactive, prompting further investigation of the Goland wing’s behavior at higher cruise speeds.
3.2. Case 2: Cruise Speed of 60 m/s
For Case 2, the optimization was conducted at a cruise speed of 60 m/s using the same methodology as the one applied for 30 m/s. The Extra Trees Regressor was identified as the best surrogate model, with the performance metrics presented in
Table 5.
For a cruise speed of 60 m/s, from 9000 combinations, the flutter constraint was active only 0.322% of the time. The design variables for which the flutter constraint was active fell within the following specific ranges: AR of 15.2–15.4; of 10.4–11.3 degrees; between 1.62 × 106 and 1.70 × 106 N.m2M; and of 6.86–6.95 degrees.
Nevertheless, the optimization algorithm found 180 optimal solutions where the flutter constraint was never active. These solutions differed in design variables from those where the flutter phenomenon was a concern. A subsequent, more detailed analysis aimed to reduce the relative error to under 5% for all outcomes.
The results in
Table 6 show that all percentage errors were below the threshold after a deeper exploration of the design space and an increase in the optimization parameters, as was implemented for the 30 m/s analysis.
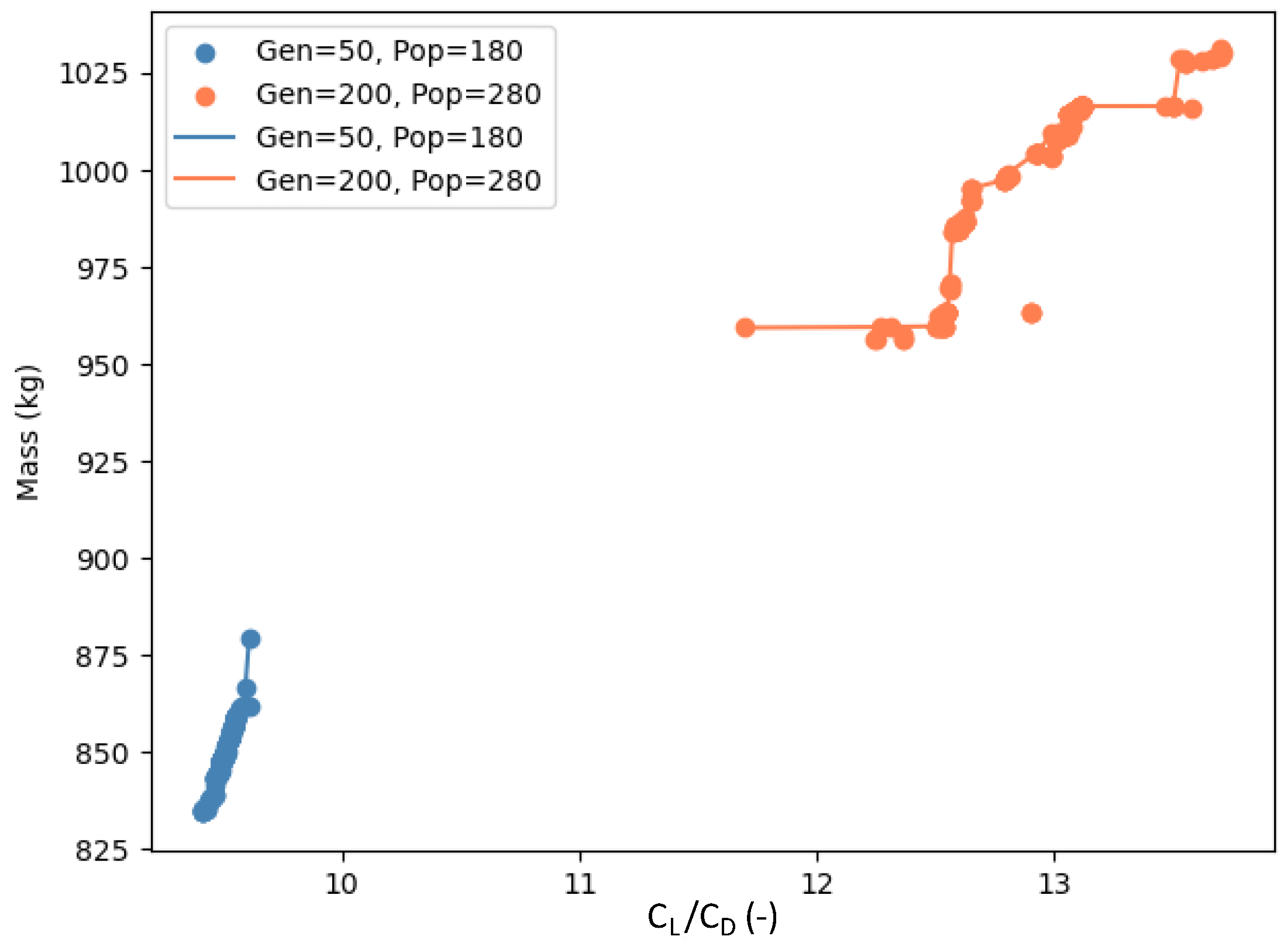
However, this intensive optimization resulted in a 491% increase in computational time. Nevertheless, the potential for greater accuracy seems to justify the additional computational effort. Comparing the Pareto fronts in
Figure 6, an improvement was evident, especially at higher
values. In these cases, the advanced optimization provided better aerodynamic efficiency with a lower mass increase. However, for some design choices, there was a significant overlap in results between the initial and advanced optimizations, indicating that increasing iterations and population sizes do not always lead to different results.
3.3. Case 3: Cruise Speed of 130 m/s
For the final case, considering a cruise speed of 130 m/s, the flutter phenomenon emerged for most of the points in the dataset, which made optimization difficult. The performance of the surrogate models on which the optimization was based is shown in
Table 7.
The initial optimization process, despite using an expanded dataset, produced results with high percentage errors compared with SHARPy, especially in terms of and flutter velocity. This was primarily due to the active flutter constraint in a vast majority (82.2%) of the examined design combinations that led to the introduction of a penalty in the objective function. Consequently, in the Pareto front of 180 optimal solutions, 24.4% had active flutter issues. To address this, the optimization was reevaluated by increasing the population size to 280 and the number of generations to 200, as was implemented for the previous cruise speeds.
The modified approach yielded a substantial reduction in the number of solutions with an active flutter constraint, down to 7.5%. However, this improvement came at a significant computational cost, with a 690% increase in time compared to the initial optimization. Despite the improvement, the percentage errors were still remarkably high, and the Pareto fronts showed several infeasible solutions due to the active flutter problem and the penalties associated with the results.
However, a closer examination of the results, focusing particularly on the solutions not affected by flutter, showed commendable accuracy. For the most exhaustive optimization (with 200 generations and a population of 280), errors were consistently less than 5%, as listed in
Table 8.
These results, in line with those obtained for the cruise speeds previously examined, clearly reveal that the high penalties were the main cause of the high percentage errors previously observed.
Two distinct groups of solutions can be immediately identified from the graph in
Figure 7. In both cases, the optimized design space is significantly reduced, but the second offers a more diverse set of solutions.
Moreover, considering only the feasible solutions, we obtained results that are aligned with the previous cases. This further strengthens the viability of the implemented SBO strategy and shows that, despite the obstacles represented by penalties, the algorithm is able to offer very good solutions.
3.4. Comparison and Discussion of the Results
A final comparison is presented in
Table 9, which details the results obtained using consistent parameters and dataset sizes across the three analyzed cruise speeds. The following optimization parameters were set: a population size of 280; 200 generations; a mutation rate of 0.5; and a crossover rate of 0.8. For the last analysis, using a cruise speed of 130 m/s, the results considered are just the feasible ones, i.e., those without the flutter constraint active.
Firstly, one can notice that, as expected, when improving one parameter, the other worsens accordingly, typical of the nature of multi-objective optimization. High values of consequently correspond to higher mass values.
It is possible to observe that the aspect ratio is consistently higher when maximizing compared to minimizing the mass across all cruise speeds. This observation aligns with established aerodynamic principles: wings with a higher AR have longer spans relative to their chord, which reduces the induced drag and consequently improves the lift-to-drag ratio. However, the flip side of this advantage is that longer, slenderer wings tend to be more flexible. Indeed, it is possible to observe how the flutter phenomenon in this case occurs at lower speeds. To counterbalance this issue, these wings are heavier and require a higher torsional stiffness to comply with the flutter speed constraint. Deviating from the usual trend is the relatively high aspect ratio observed at the highest cruise speed for the mass minimization objective. This unexpected outcome may be attributed to the narrower feasible design space identified by the surrogate model, and the optimizer that might have been trapped in a local minima region.
At the lower cruise speeds (30 m/s and 60 m/s), when the primary objective is to minimize mass, a positive and more pronounced sweep angle is observed. This might be associated with a structural benefit, redistributing the lift toward the root, which can result in a lighter wing structure. However, when maximizing , a lower sweep may favor aerodynamic efficiency at these speeds.
Variations in torsional stiffness and the angle of attack across the different objectives and velocities are subtler compared to other parameters. However, it is worth noting that higher values are associated with lower angles of attack. This trend aligns with the expectation that a reduced angle of attack would lead to decreased aerodynamic drag. Lowering the angle of attack while still achieving adequate lift is a strategy to enhance the aerodynamic efficiency of the wing.
Another important observation about the aspect ratio is that for both 30 m/s and 60 m/s cruise speeds, the optimal solutions approach the boundaries of the defined design space, which was set between 6 and 16. This is significant, as it indicates that the design space might not fully encompass the optimal regions for these objectives at these speeds.
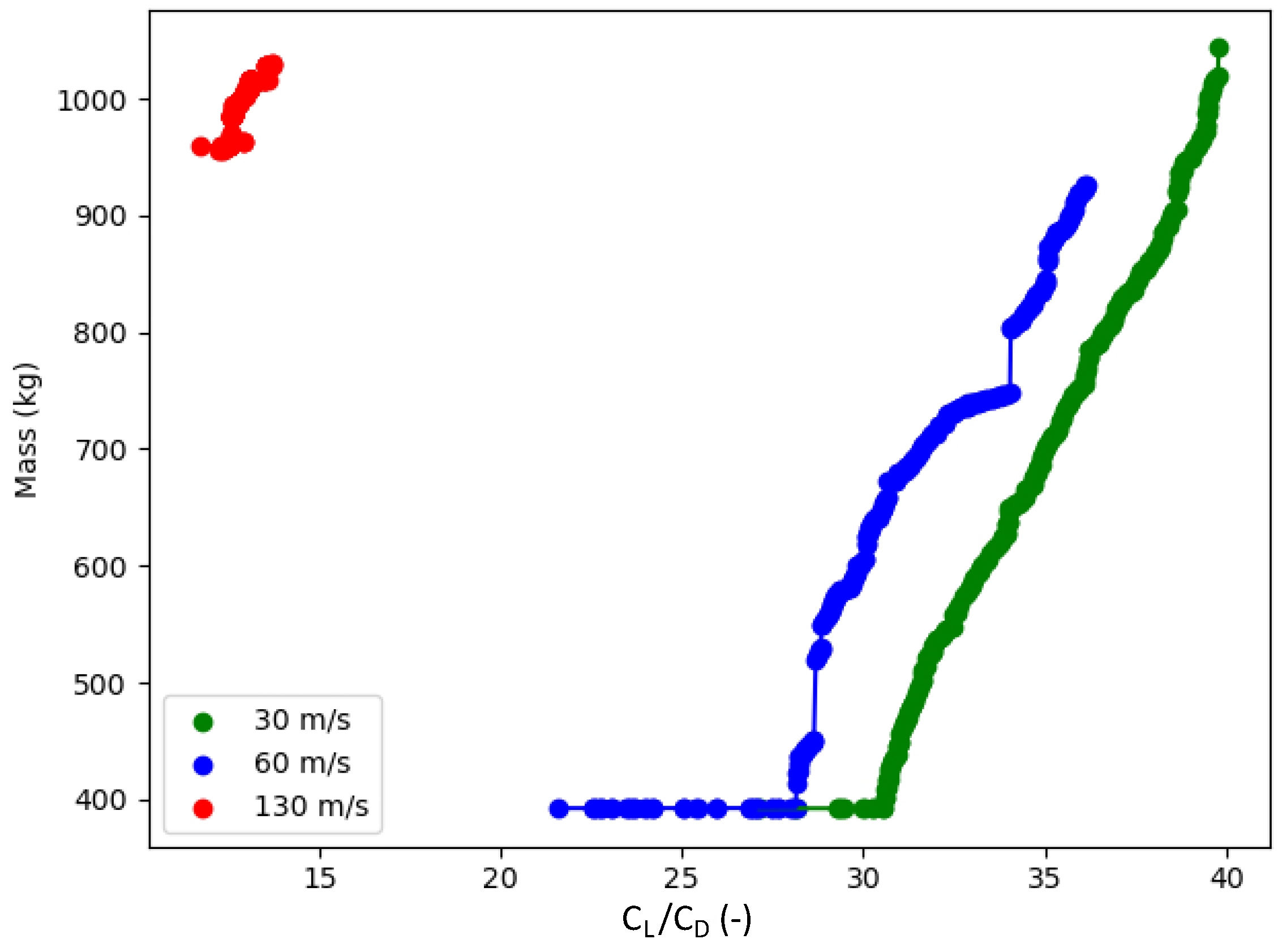
The plot presented in
Figure 8 delineates the Pareto fronts for the three analyzed cruise speeds, 30 m/s, 60 m/s, and 130 m/s, derived using the same optimization parameters. It is important to note that the results at 130 m/s represent only the feasible solutions. As the cruise speed increases, the Pareto front tends to be narrower and shift toward lower
values, as expected. The results at 130 m/s present an evident distinction. Unlike the relatively distributed Pareto fronts at 30 m/s and 60 m/s, the solutions at 130 m/s are remarkably more clustered. This localized concentration indicates that, at this higher cruise speed, design solutions that avoid flutter are limited, especially within the limits of our design space. Moreover, these solutions at 130 m/s are characterized by relatively high masses and moderate
values. At higher speeds, the overly stringent constraint of flutter speed within our design space leads to results in which, to avoid flutter, the wing structure needs to be heavier, consequently compromising its aerodynamic efficiency.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}