
Research on a Linear Piezoelectric Actuator Using T-Shape Transducer to Realize High Mechanical Output




Abstract
:1. Introduction
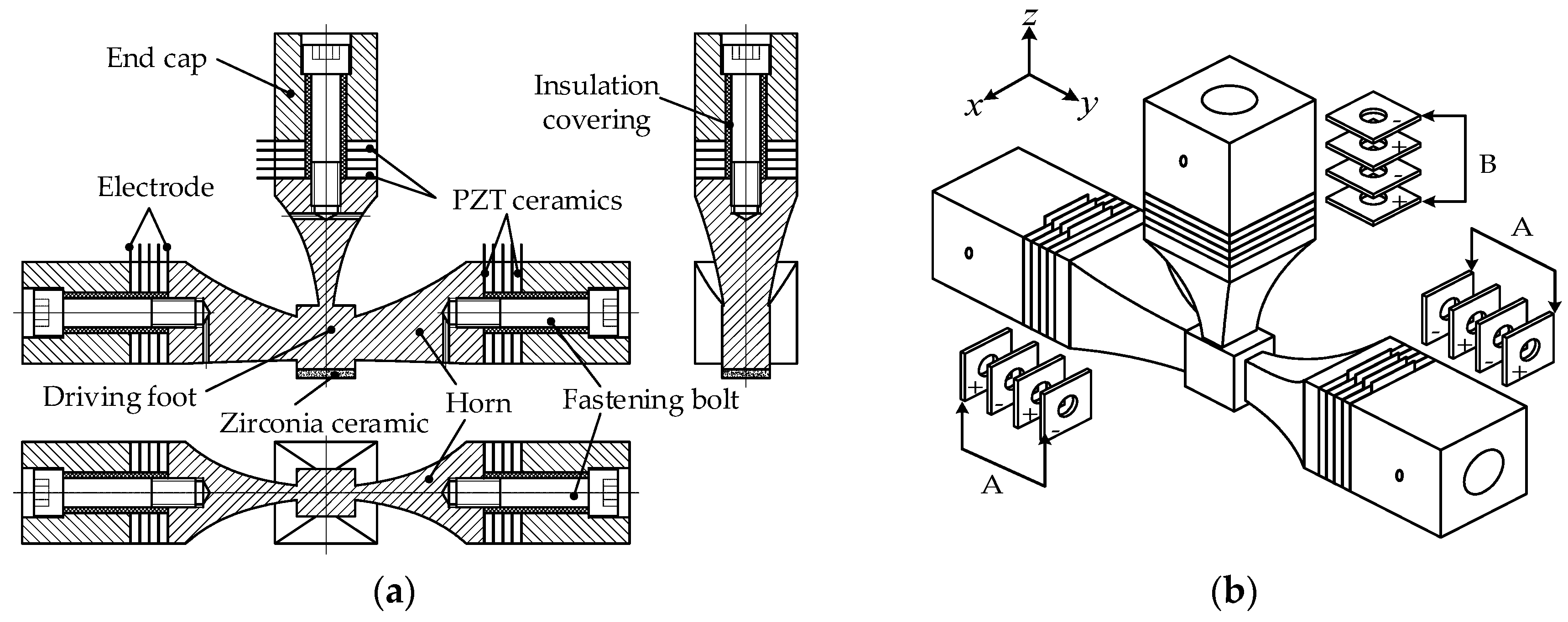
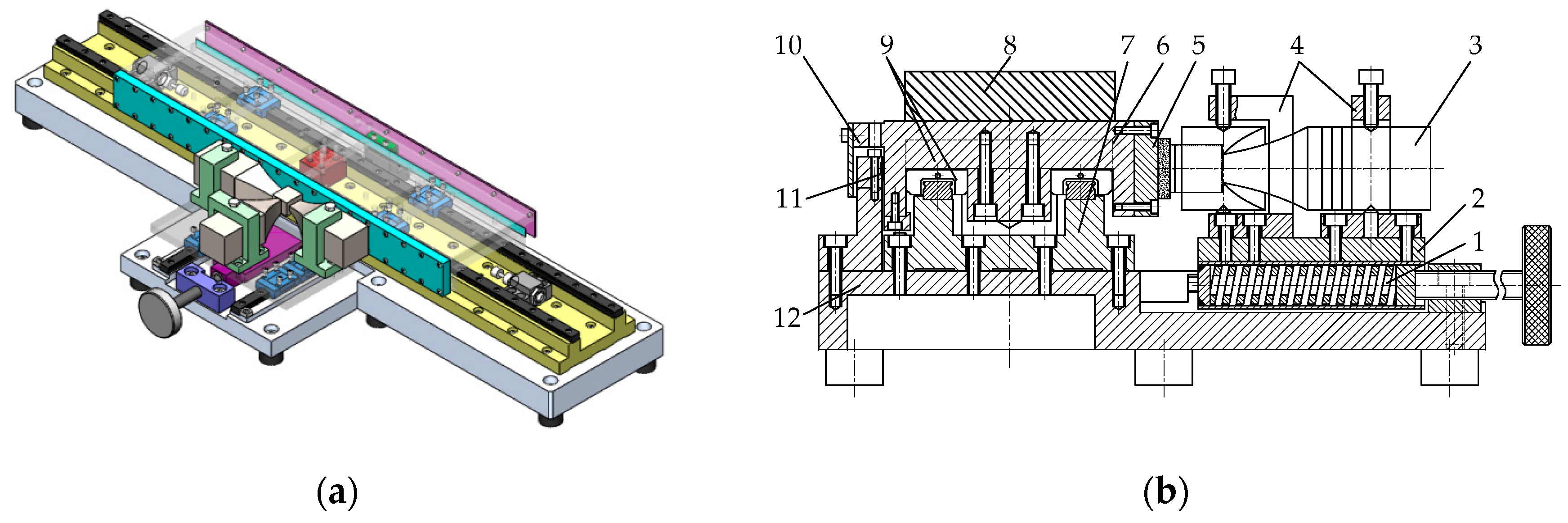
2. LUSM Structure
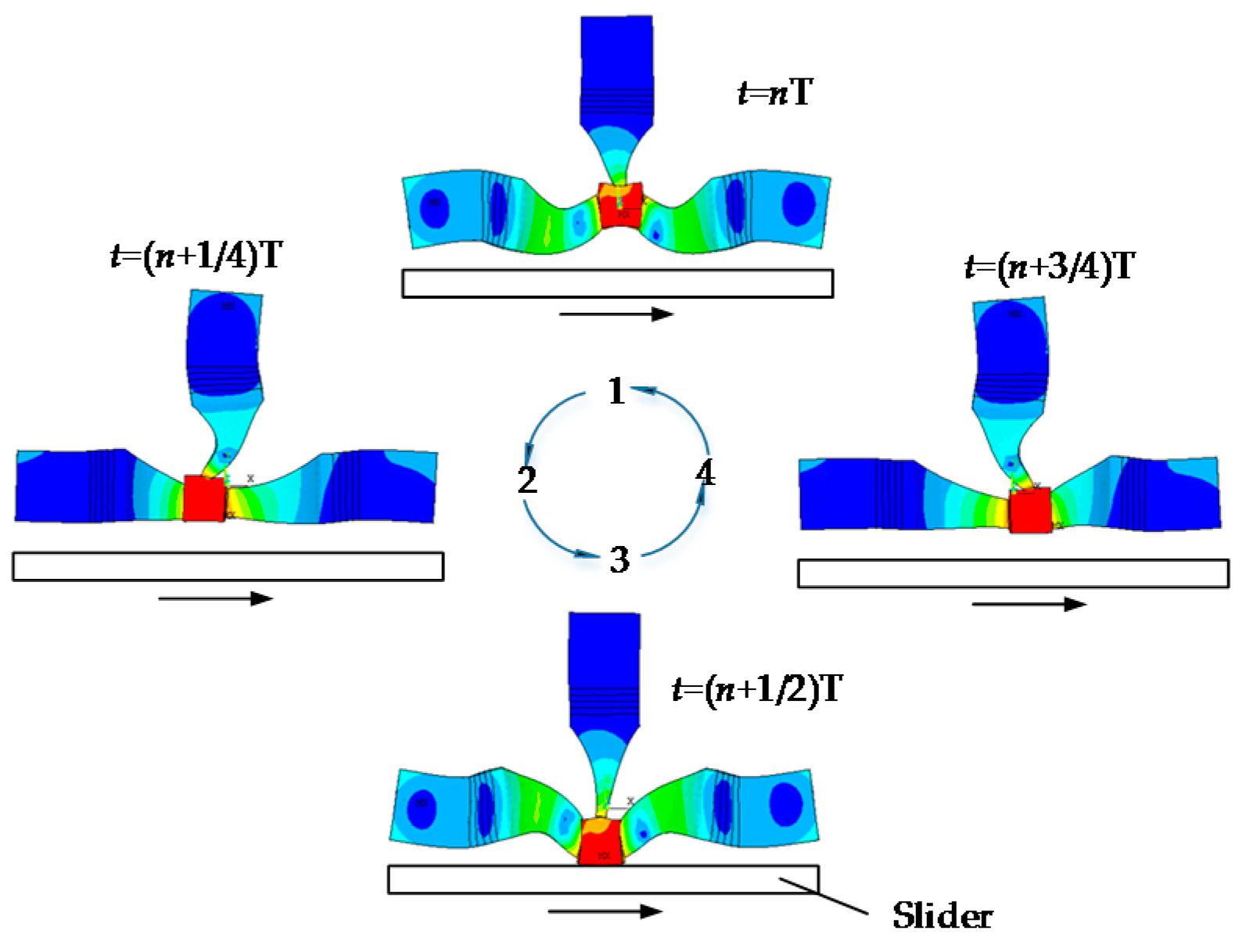
3. Operating Principle
- From the 1/4T to 1/2T phase, the driving foot moves from state 2 to state 3 and starts to make contact with the slider. During this period, the motor generates a rightward driving force to actuate the slider.
- In the duration of the third phase, the driving foot moves from the bottom to the right and the motor departs from the slider gradually. The driving force decreases to zero slowly.
- During the last 1/4T phase, the driving foot will be back in its original state. The driving force disappears completely.
4. Design and Analysis
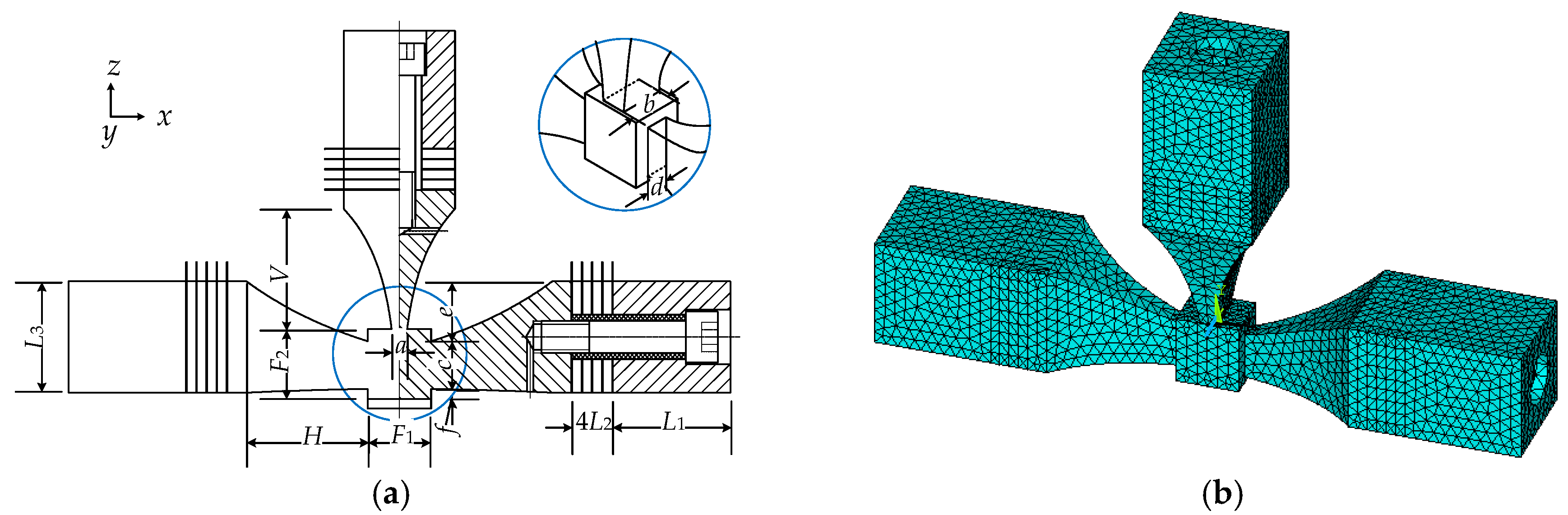
4.1. Structure Optimization and Analysis
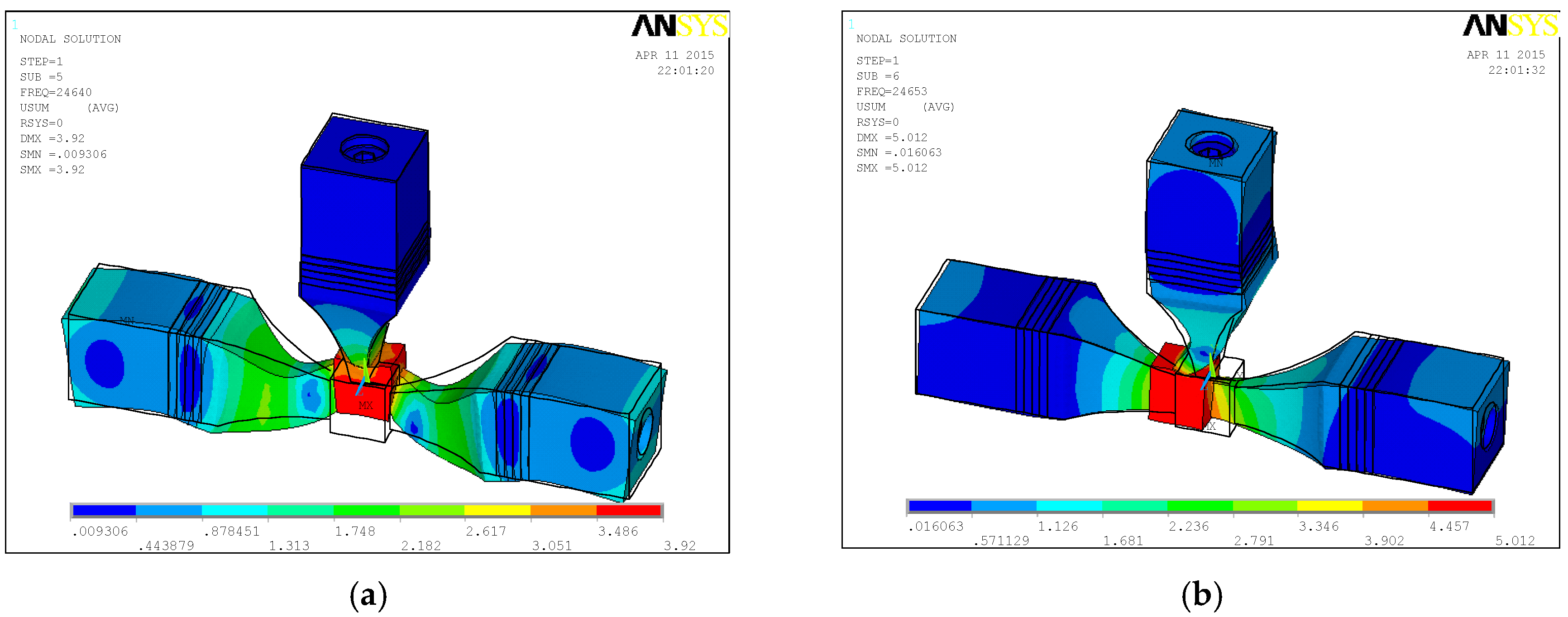
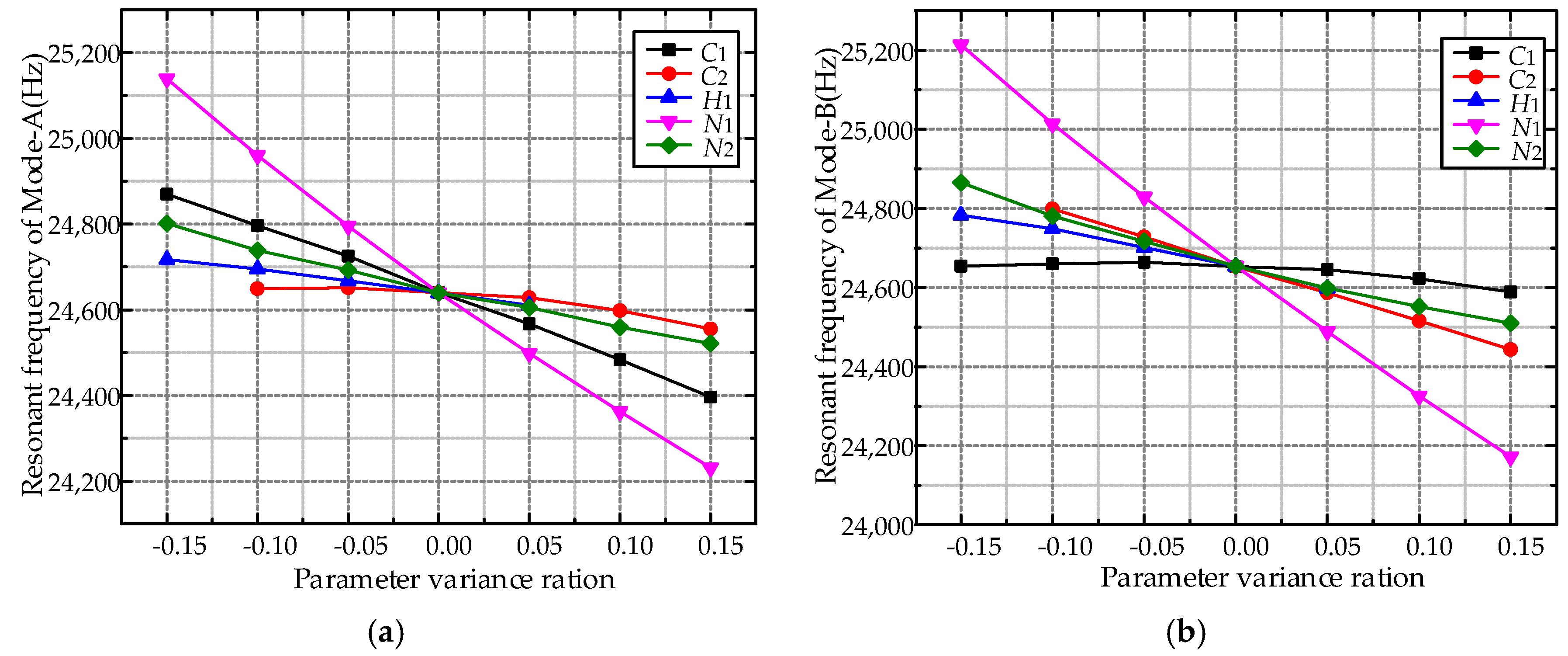
4.2. Modal Analysis and Sensitivity Analysis
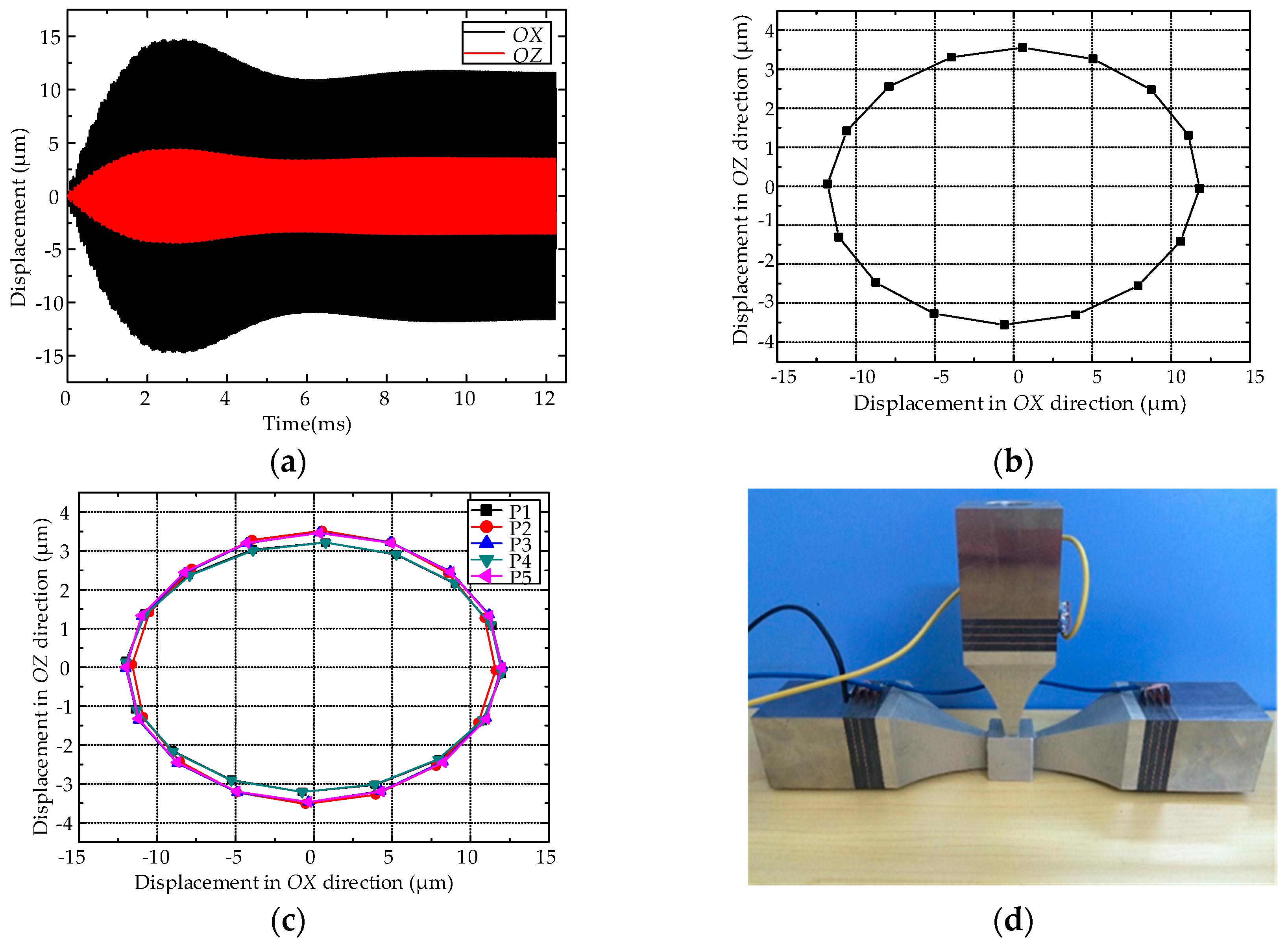
4.3. Transient Analysis of the Ultrasonic Motor
5. Experiments
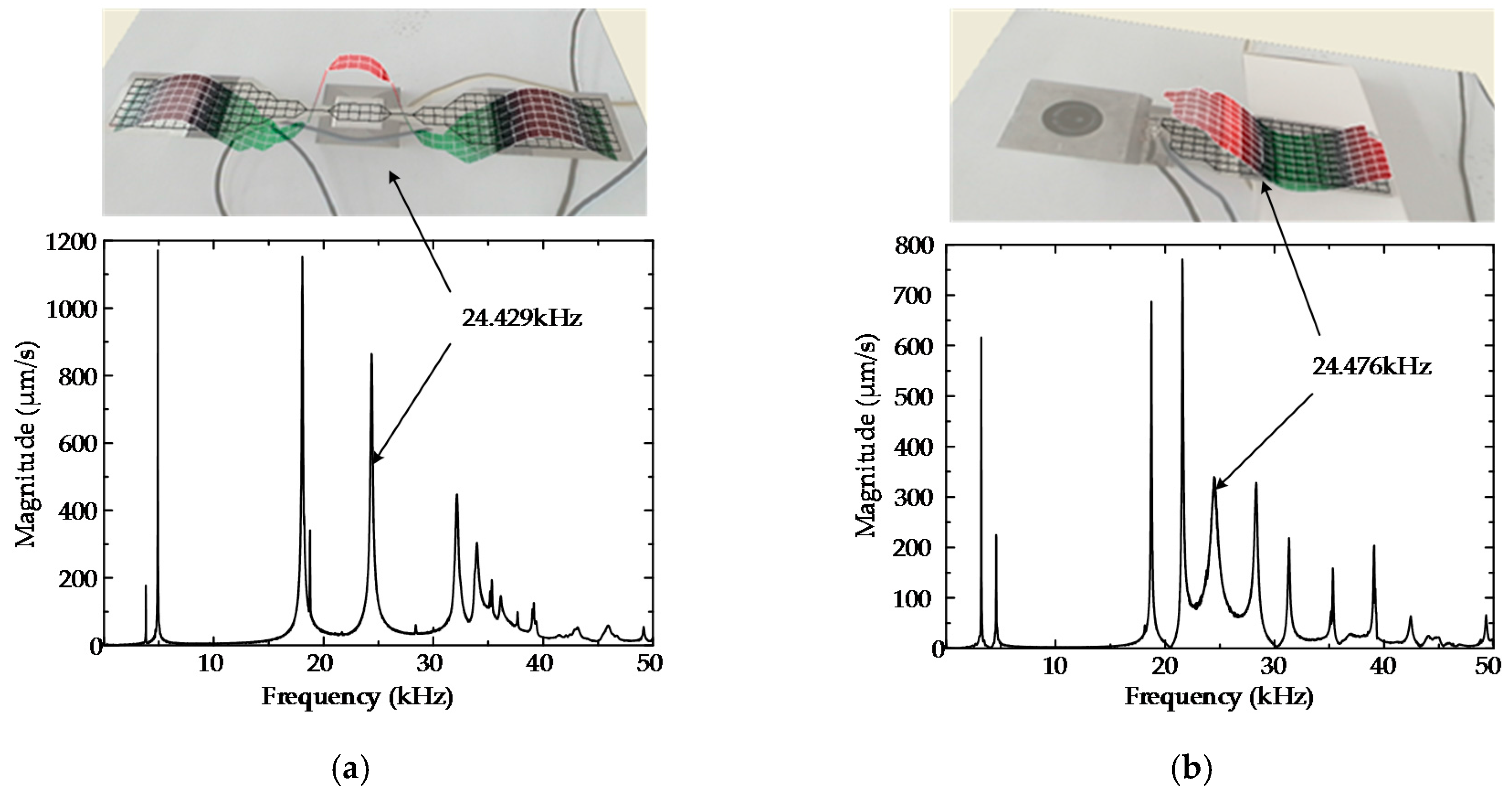
5.1. Vibration Characteristic Experiments
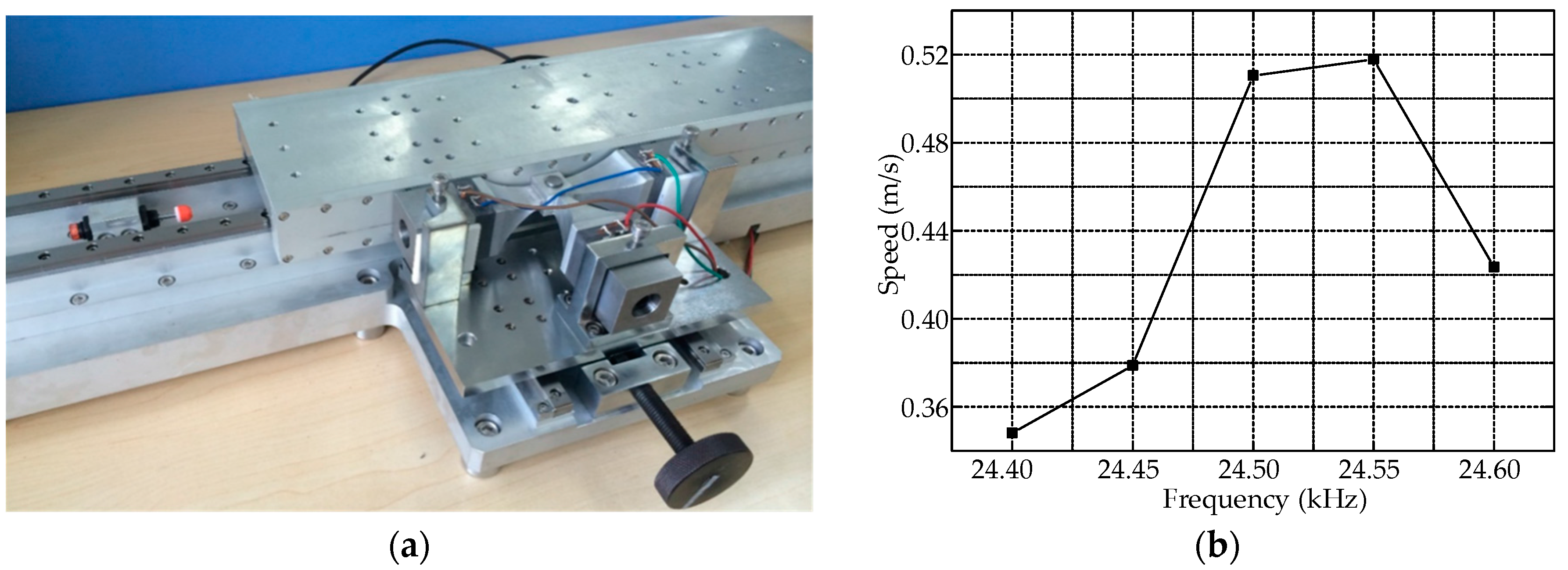
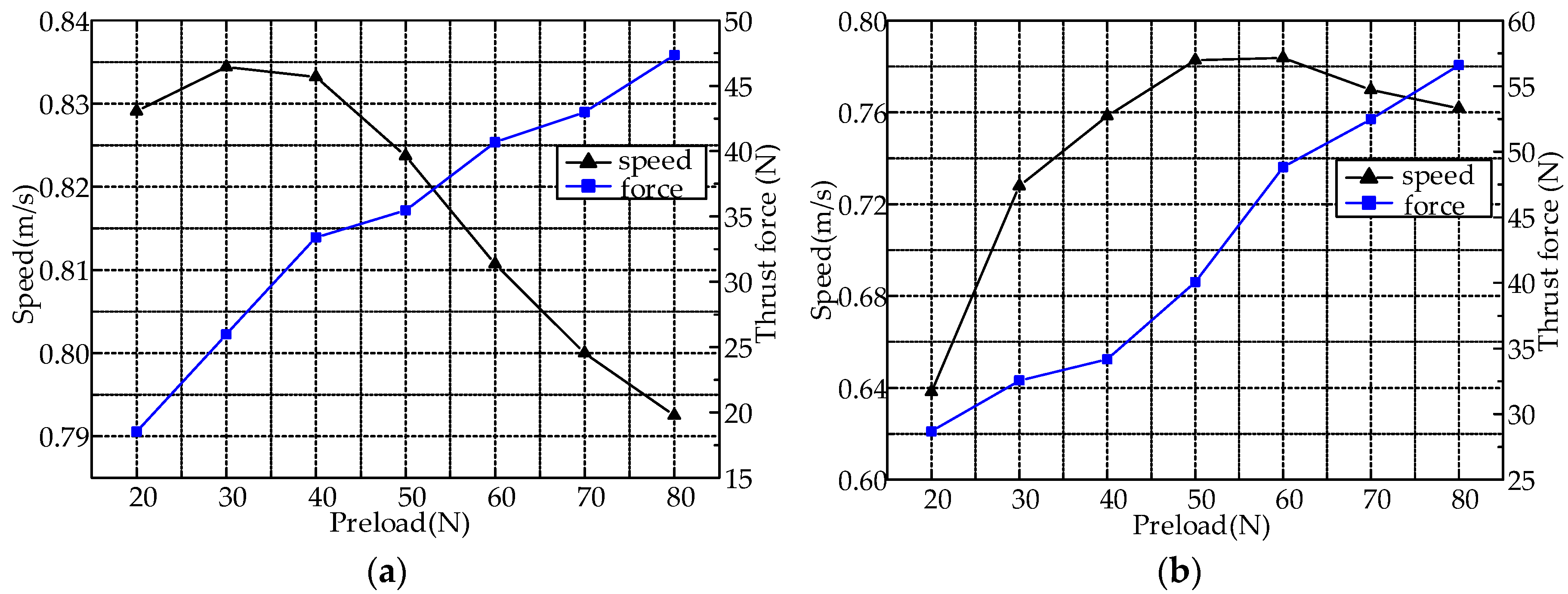
5.2. Mechanical Output Performance Experiments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ueha, S.; Tomikawa, Y.; Kurosawa, M.; Nakamura, N. Ultrasonic Motors: Theory and Applications; Oxford University Press: Oxford, UK, 1993; pp. 1–20. [Google Scholar]
- Zhao, C.S. Recent progress in ultrasonic motor techniques. J. Vib. Meas. Diagn. 2004, 24, 1–5. [Google Scholar]
- Zhao, C.S. Ultrasonic Motors: Technologies and Applications; Science Press: Beijing, China, 2007; pp. 1–11. [Google Scholar]
- Spanner, K.; Vyshneevskyy, O.; Wishnewskiy, W. New Linear Ultrasonic Micromotor for Precision Mechatronic Systems. In Proceedings of the Actuator 2006: 10th International Conference on New Actuator, Bremen, Germany, 14–16 June 2006.
- Lu, X.; Hu, J.; Zhang, Q.; Yang, L.; Zhao, C.; Vasiljev, P. An ultrasonic driving principle using friction reduction. Sens. Actuators A: Phys. 2013, 199, 187–193. [Google Scholar] [CrossRef]
- Li, X.; Ci, P.; Liu, G.; Dong, S. A two-layer linear piezoelectric micromotor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 405–411. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Pan, S.; Hu, J.; Zhao, C.; Dong, S. A small linear ultrasonic motor utilizing longitudinal and bending modes of a piezoelectric tube. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 705–709. [Google Scholar] [CrossRef]
- Shafik, M.; Abdalla, H.S.; Fransson, P. A piezoelectric servo feed drive for electro discharge machining system industrial applications using linear ultrasonic motor. J. Manuf. Sci. Eng. 2013. [Google Scholar] [CrossRef]
- Ci, P.; Liu, G.; Chen, Z.; Dong, S. A standing wave linear ultrasonic motor operating in face-diagonal-bending mode. Appl. Phys. Lett. 2013. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Ci, P.; Liu, G.; Dong, S. A standing wave linear ultrasonic motor operating in in-plane expanding and bending modes. Rev. Sci. Instrum. 2015. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Zhu, C.; Chu, X.; Zhao, Y.; Amin, M.; Fan, Y. A novel linear piezoelectric actuator with two working principles of standing and traveling wave vibration mode. AIP Adv. 2015. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, W.; Xu, D.; Feng, P.; Liu, J. Improvement of a rectangle-shape linear piezoelectric motor with four driving feet. Ceram. Int. 2015, 41, 594–601. [Google Scholar] [CrossRef]
- Kurosawa, M.K.; Kodaira, O.; Tsuchitoi, Y.; Higuchi, T. Transducer for high speed and large thrust ultrasonic linear motor using two sandwich-type vibrators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1188–1195. [Google Scholar] [CrossRef] [PubMed]
- Yun, C.H.; Ishii, T.; Nakamura, K.; Ueha, S.; Akashi, K. A high power ultrasonic linear motor using a longitudinal and bending hybrid bolt-clamped Langevin type transducer. Jpn. J. Appl. Phys. 2001, 40, 3773–3776. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, W.; Liu, J.; Shi, S. A high-power linear ultrasonic motor using longitudinal vibration transducers with single foot. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1860–1867. [Google Scholar] [PubMed]
- Liu, Y.; Liu, J.; Chen, W.; Shi, S. A U-shaped linear ultrasonic motor using longitudinal vibration transducers with double feet. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 981–989. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, W.; Liu, J.; Yang, X. A high-power linear ultrasonic motor using bending vibration transducer. IEEE Trans. Ind. Electron. 2013, 60, 5160–5166. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, W.; Liu, J.; Shi, S. A rectangle-type linear ultrasonic motor using longitudinal vibration transducers with four driving feet. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 777–785. [Google Scholar] [CrossRef] [PubMed]
- Hua, S.; Meng, Y.; Lou, Y.; Li, Z.; Wang, X. Screw-type actuator driven by piezoelectric transducers. Adv. Mech. Eng. 2015. [Google Scholar] [CrossRef]
- Chu, X.; Wang, J.; Yuan, S.; Li, L.; Cui, H. A screw-thread-type ultrasonic actuator based on a Langevin piezoelectric vibrator. Rev. Sci. Instrum. 2014. [Google Scholar] [CrossRef] [PubMed]
- Bowden, F.P.; Leben, L. The Friction and Lubrication of Solids, Part I; Clarendon Press: Oxford, UK, 1950. [Google Scholar]
- Bowden, F.P.; Leben, L. The Friction and Lubrication of Solids, Part II; Clarendon Press: Oxford, UK, 1964. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Vertical Transducer | Left horizontal Transducer | Right Horizontal Transducer | Position of Bottom Point |
|---|---|---|---|---|
| t = nT | contraction | freedom | freedom | 1 |
| t = (n + 1/4)T | freedom | extension | contraction | 2 |
| t = (n + 1/2)T | extension | freedom | freedom | 3 |
| t = (n + 3/4)T | freedom | contraction | extension | 4 |
| L1 | L2 | L3 | F1 | F2 | H | V |
|---|---|---|---|---|---|---|
| 38.0 | 3.0 | 35.0 | 20.0 | 20.0 | 36.0 | 36.0 |
| L1 | L2 | L3 | F1 | F2 | H | V |
|---|---|---|---|---|---|---|
| 37.0 | 3.0 | 35.0 | 20.0 | 22.0 | 38.2 | 37.8 |
| Mode | Vibration Test (kHz) | The Finite Element Simulation (kHz) | Absolute Deviation (kHz) | Relative Deviation (%) |
|---|---|---|---|---|
| Mode A | 24.429 | 24.640 | 0.211 | 0.86 |
| Mode B | 24.476 | 24.653 | 0.177 | 0.72 |
| Parameters | Previous Motor | Proposed Motor |
|---|---|---|
| Exciting frequency (kHz) | 25.32 | 24.55 |
| Quantity of PZT (mm3) | 39,670 | 38,560 |
| Weight (kg) | 1.28 | 1.50 |
| Bottom area of driving foot (mm2) | 150 | 360 |
| Exciting voltage (Vrms) | 200 | 150 |
| Maximum speed (mm/s) | 1160 | 830 |
| Maximum thrust force (N) | 20 | 56 |
| Maximum power (W) | 6.14 | 37.22 |
| Maximum Power density (W/kg) | 4.80 | 24.81 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, S.; Shi, S.; Chen, W.; Liu, J.; Liu, Y. Research on a Linear Piezoelectric Actuator Using T-Shape Transducer to Realize High Mechanical Output. Appl. Sci. 2016, 6, 103. https://doi.org/10.3390/app6040103
Shao S, Shi S, Chen W, Liu J, Liu Y. Research on a Linear Piezoelectric Actuator Using T-Shape Transducer to Realize High Mechanical Output. Applied Sciences. 2016; 6(4):103. https://doi.org/10.3390/app6040103
Chicago/Turabian StyleShao, Sijia, Shengjun Shi, Weishan Chen, Junkao Liu, and Yingxiang Liu. 2016. "Research on a Linear Piezoelectric Actuator Using T-Shape Transducer to Realize High Mechanical Output" Applied Sciences 6, no. 4: 103. https://doi.org/10.3390/app6040103
APA StyleShao, S., Shi, S., Chen, W., Liu, J., & Liu, Y. (2016). Research on a Linear Piezoelectric Actuator Using T-Shape Transducer to Realize High Mechanical Output. Applied Sciences, 6(4), 103. https://doi.org/10.3390/app6040103