
Complex Fluids in Energy Dissipating Systems


Abstract
:1. Introduction
2. Active Systems
2.1. Field-Active Fluids
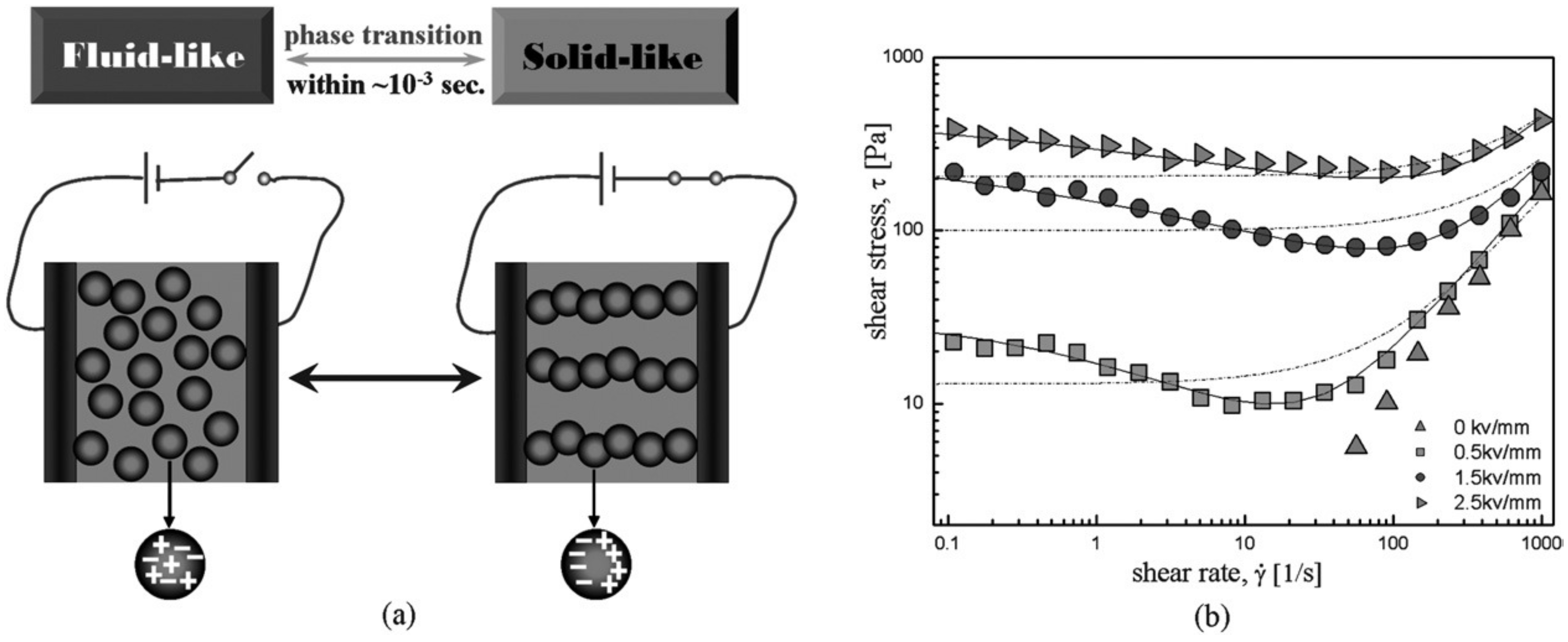
2.1.1. Electrorheological Fluids
2.1.2. Magnetic Fluids
Magnetorheological Fluids
Ferrofluids
2.1.3. Electro-Magneto-Rheological Fluids
2.2. Field-Active Fluids in Energy Dissipating Systems
2.2.1. Active Dampers
2.2.2. Active Sandwich Structures
2.2.3. Active Body Armor
- Footwear. Athletic footwear are composed of three parts: the upper, which cosily and comfortably encloses the foot; the sole, which provides traction, protection and a durable wear surface; and a midsole for enhanced protection and shock absorption when the heel strikes the ground. This latter part is particularly important in footwear designed to be used over a long period of time. The midsole should be made of cushioning materials, soft enough to absorb the shock and firm enough to not bottom out before the impact is totally absorbed. Conventional running and walking footwear provide the user with the maximum cushioning, which results in a lower stability, bringing the ’runner’s knee’ and other athletic injuries as collateral damage. Rosenberg [102] disclosed, among others, an exemplifying embodiment that provides a variable footwear support method that includes one sensor collecting the information about intensity and frequency of foot-falls; and one electric/magnetic field generator adapted to generate an energy field upon a rheological body, which contains the active fluids and is arranged within the sole of the footwear. The energy field controls the viscosity of the fluids and, consequently, adjust the flow rate of ER or MR fluid into and/or out of certain chambers. Thus, this invention allows different degrees of cushioning and support within the sole assembly. Other inventions related to the applications of active fluids to footwear technology can be found in the patents of de Dios García et al. [103] and Meschter et al. [104].
- Helmet. In certain sports such as american football, ice hockey, lacrosse, ski, etc. shocks are frequent and many of them result in concussions to the brain. The kinematics that induce a concussion are thought to consist primarily of rotational acceleration-deceleration motions of the head. Thus, any effective device in preventing concussion needs to provide a constraint for head accelerations to below concussive-inducing threshold levels that occur when the wearer is subject to a high impulsive force. In addition, such devices need to be compact and place minimal impediments to the normal motion of the head to allow the user unobtrusive and unhindered operation. Fischell et al. [105] disclosed an invention that connects helmet and shoulders in a way that offers a minimal impediment to the normal motion of the head at typical rates, but provides a nearly rigid connection between the head and torso under impact conditions and, hence, greatly reduces the angular acceleration of the head relative to the body. The primary feature of this invention is a mechanism that effectively creates a telescoping mechanism to allow rotational motions about two orthogonal axes simultaneously (superior-inferior and lateral axis). In addition, the telescoping motion of the plates places the active fluid in a repeatable and consistent shearing motion as the head is moved. Rotation about the third axis (posterior-anterior) is controlled by an active fluid enabled rotational damper, which disallows high rates of angular acceleration that could cause the athlete to suffer a brain concussion.
3. Passive Systems
3.1. Field-Passive Fluids
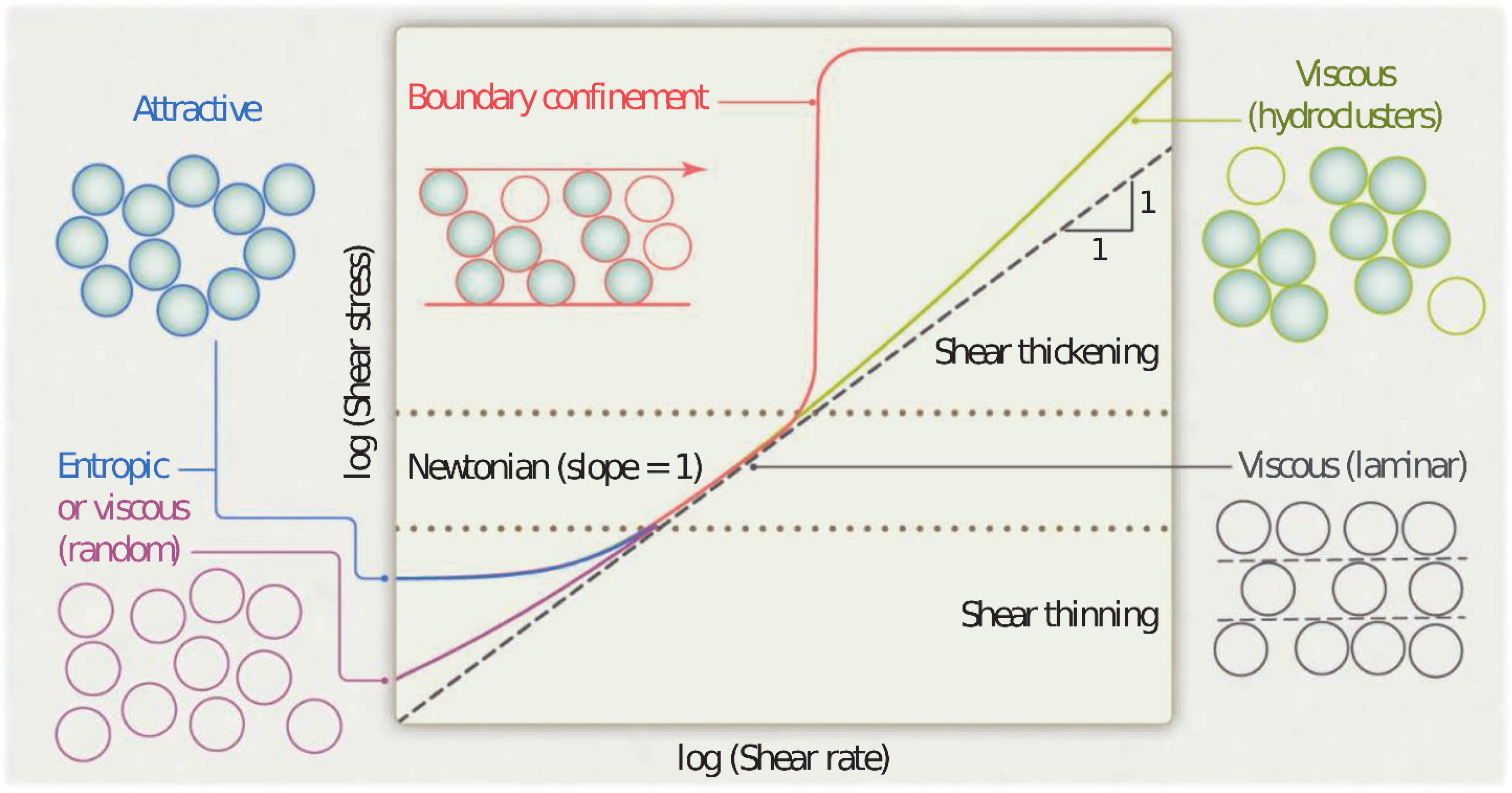
3.1.1. Shear Thickening Fluids
- Shear thickening describes a reversible increase in viscosity with increasing the applied shear rate or shear stress. It is due solely to lubrication hydrodynamic forces arising when particles are driven by the shear flow into close proximity, hydrodynamic clusters are formed and shear thickening results (hydroclustering formation mechanism). It is typical for stable colloidal dispersions.
- Dilatancy is due to a flow-induced volume expansion as a consequence of frictional interactions between particles. It is typical for granular dispersions.
- Rheopexy refers to an increase of the viscosity with time upon the application of a constant shear rate. It is typical of unstable colloidal dispersions.
3.1.2. Viscoelastic Fluids
3.2. Field-passive Fluids in Energy Dissipating Systems
3.2.1. Passive Dampers
3.2.2. Passive Sandwich Structures
3.2.3. Passive Body Armor
4. Summary and Perspectives
- Whereas the nanoparticles in STFs stay dispersed in the suspension, the particles in MRFs may form aggregates, settle or precipitate, making the fluid ineffective, although proprietary additives can promote particle suspension. For the sake of truth, shear thickening behaviour, can be made from larger particles and, consequently, the fluid would face the same phase-separation issue referred to MRFs.
- STFs harden almost instantaneously (few milliseconds) upon impact, while MRFs require a magnetic field to be activated. Thus, apart from being a drawback in light-weight applications, an eventual loss of power or short circuit could deactivate the system, causing the armor to fail.
Acknowledgments
Conflicts of Interest
Abbreviations
| ERFs | Electrorheological fluids |
| FFs | Ferrofluids |
| MRFs | Magnetorheological fluids |
| EMRFs | Electro-magneto-rheological fluids |
| STFs | Shear thickening fluids |
| VEFs | Viscoelastic fluids |
| PPEs | Protective Personal Equipments |
| MMOD | Micro Meteor Orbital Debris |
| GER | Giant Electrorheological effect |
| WBV | Whole Body Vibration |
| HAV | Hand-Arm Vibration |
| SAOS | Small Amplitude Oscillatory Shear |
| MAOS | Medium Amplitude Oscillatory Shear |
| LAOS | Large Amplitude Oscillatory Shear |
References
- Injuries in the European Union, Report on Injury Statistics 2008–2010. In Technical Report, European Association for Injury Prevention and Safety Promotion (EuroSafe); European Union: Amsterdam, The Netherlands, 2013; Available online: http://ec.europa.eu/health/datacollection/docs/idbreport2013en.pdf (accessed on 18 July 2016).
- Workplace Exposure to Vibration in Europe: An Expert Review, 2008. European Risk Observatory Report, Luxemburg, 2008. Available online: https://osha.europa.eu/en/tools-and-publications/publications/reports/8108322vibrationexposure (accessed on 18 July 2016).
- Griffin, M.; Howarth, H.; Pitts, P.; Fischer, S.; Kaulbars, U.; Donati, P.; Bereton, P. HAV Good Practice Guide V7.7 English 260506. Non-Binding Guide to Good Practice with a View to Implementation of Directive 2002/44/EC on the Minimum Health and Safety Requirements Regarding the Exposure of Workers to the Risks Arising from Physical Agents (Vibrations), 2006. Available online: http://resource.isvr.soton.ac.uk/HRV/VIBGUIDE/HAV%20Good%20practice%20Guide%20V7.7%20English%20260506.pdf (accessed on 18 July 2016).
- Griffin, M.; Howarth, H.; Pitts, P.; Fischer, S.; Kaulbars, U.; Donati, P.; Bereton, P. WBV Good Practice Guide v6.7h English 28/11/08. Non-Binding Guide to Good Practice with a View to Implementation of Directive 2002/44/EC on the Minimum Health and Safety Requirements Regarding the Exposure of Workers to the Risks Arising from Physical Agents (Vibrations), 2008. Available online: http://resource.isvr.soton.ac.uk/HRV/VIBGUIDE/20081108%20WBVGoodpracticeGuide%20v6.7h%20English.pdf (accessed on 18 July 2016).
- Mobile Phone Accessories Market: Power Banks is Foreseen to Foster the Mobile Accessory Industry: Global Industry Analysis and Opportunity Assessment 2015–2025; Future Market Insights (FMI): 2015. Available online: http://www.futuremarketinsights.com/reports/global-mobile-phone-accessories-market (accessed on 18 July 2016).
- Annual Report. Sumitomo Riko, 2014. Available online: http://www.sumitomoriko.co.jp/ir/download/pdf/2014/annual2014en01.pdf (accessed on 18 July 2016).
- Cazort, J.; Richardson, D. Acceleration Sensitive Shock Absorber. US Patent 5,462,140, 31 October 1995. [Google Scholar]
- Galindo-Rosales, F.J.; No, L.C.D.; Sousa, P.C.; Ribeiro, V.M.; Oliveira, M.S.; Alves, M.A.; Pinho, F.T. Viscoelastic instabilities in micro-scale flows. Exp. Therm. Fluid Sci. 2014, 59, 128–139. [Google Scholar] [CrossRef] [Green Version]
- Balandin, D.V.; Bolotnik, N.N.; Pilkey, W.D. Optimal Protection From Impact, Shock and Vibration; Gordon and Breach Science Publishers: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Duff, A.W. The Viscosity of Polarized Dielectrics. Phys. Rev. (Ser. I) 1896, 4, 23–38. [Google Scholar] [CrossRef]
- Winslow, W. Method and Means for Translating Electrical Impulses Into Mechanical Force. US Patent 2,417,850, 25 March 1947. [Google Scholar]
- Winslow, W.M. Induced Fibration of Suspensions. J. Appl. Phys. 1949, 20, 1137–1140. [Google Scholar] [CrossRef]
- Makela, K.K. Characterization and Performance of Electrorheological Fluids Based on Pine Oils; VTT Manufacturing Technology, Julkaisija -Utgivare- Publisher: Espoo, Finland, 21 May 1999. [Google Scholar]
- Winslow, W.M. Field Controlled Hydraulic Device. US Patent 2,661,596, 8 December 1953. [Google Scholar]
- Winslow, W. Field Responsive Force Transmitting Compositions. US Patent 3,047,507, 31 July 1962. [Google Scholar]
- Halsey, T.C. Electrorheological fluids. Science 1992, 258, 761–766. [Google Scholar] [CrossRef] [PubMed]
- Barnes, H.A.; Walters, K. The yield stress myth? Rheol. Acta 1985, 24, 323–326. [Google Scholar] [CrossRef]
- Cheng, D.C.H. Yield Stress: A Time-Dependent Property and How to Measure it. Rheol. Acta 1986, 25, 542–554. [Google Scholar] [CrossRef]
- Bonnecaze, R.T.; Brady, J.F. Yield stresses in electrorheological fluids. J. Rheol. 1992, 36, 73–115. [Google Scholar] [CrossRef]
- Sakai, T.; Kobayashi, K.; Sato, M. Static Yield Stress of an Electro-Rheological Fluid. J. Colloid Interface Sci. 1996, 180, 315–322. [Google Scholar] [CrossRef]
- Barnes, H.A. The yield stress—A review or “panta rei”—everything flows? J. Non-Newton. Fluid Mech. 1999, 81, 133–178. [Google Scholar] [CrossRef]
- Choi, H.J.; Cho, M.S.; Kim, J.W.; Kim, C.A.; Jhon, M.S. A yield stress scaling function for electrorheological fluids. Appl. Phys. Lett. 2001, 78, 3806–3808. [Google Scholar] [CrossRef]
- Galindo-Rosales, F.J.; Rubio-Hernández, F.J. Static and Dynamic Yield Stresses of Aerosil 200 suspension in Polypropylene Glycol. Appl. Rheol. 2010, 20, 22787. [Google Scholar] [CrossRef]
- Seo, Y. A new yield stress scaling function for electrorheological fluids. J. Non-Newton. Fluid Mech. 2011, 166, 241–243. [Google Scholar] [CrossRef]
- Wen, W.; Huang, X.; Sheng, P. Particle size scaling of the giant electrorheological effect. Appl. Phys. Lett. 2004, 85, 299–301. [Google Scholar] [CrossRef]
- Martin, J.E.; Odinek, J.; Halsey, T.C.; Kamien, R. Structure dynamics of electrorheological fluids. Phys. Rev. E 1998, 57, 756–775. [Google Scholar] [CrossRef]
- Choi, H.J.; Jhon, M.S. Electrorheology of polymers and nanocomposites. Soft Matter 2009, 5, 1562–1567. [Google Scholar] [CrossRef]
- Huang, X.; Wen, W.; Yang, S.; Sheng, P. Mechanisms of the giant electrorheological effect. Solid State Commun. 2006, 139, 581–588. [Google Scholar] [CrossRef]
- Wen, W.; Huang, X.; Sheng, P. Electrorheological fluids: Structures and mechanisms. Soft Matter 2008, 4, 200–210. [Google Scholar] [CrossRef]
- Wen, W.; Huang, X.; Yang, S.; Lu, K.; Sheng, P. The giant electrorheological effect in suspensions of nanoparticles. Nat. Mater. 2003, 2, 727–730. [Google Scholar] [CrossRef] [PubMed]
- Charles, S. Lecture Notes in Physics. Ferrofluids: Magnetically Controllable Fluids and Their Applications. In The preparation of Magnetic Fluids; Odenbach, S., Ed.; Springer-Verlag Berlin: Heidelberg, Germany, 2002. [Google Scholar]
- Rankin, P.J.; Ginder, J.M.; Klingenberg, D.J. Electro- and magneto-rheology. Curr. Opin. Colloid Interface Sci. 1998, 3, 373–381. [Google Scholar] [CrossRef]
- Rabinow, J. The magnetic clutch. AIEE Trans. 1948, 67, 1308–1315. [Google Scholar]
- Aslam, M.; Xiong-Liang, Y.; Zhong-Chao, D. Review of magnetorheological (MR) fluids and its applications in vibration control. J. Mar. Sci. Appl. 2006, 5, 17–29. [Google Scholar]
- De Vicente, J.; Klingenberg, D.J.; Hidalgo-Alvarez, R. Magnetorheological fluids: A review. Soft Matter 2011, 7, 3701–3710. [Google Scholar] [CrossRef]
- Phule, P. Magnetorheological Fluid. US Patent 5,985,168, 16 November 1999. [Google Scholar]
- Kciuk, M.; Turczyn, R. Properties and applications of magnetorheological fluids. J. Achiev. Mater. Manuf. Eng. 2006, 18, 127–130. [Google Scholar]
- Olabi, A.G.; Grunwald, A. Design and application of magneto-rheological fluid. Mater. Des. 2007, 28, 2658–2664. [Google Scholar] [CrossRef] [Green Version]
- Carlson, J.; Jolly, M.; Ivers, D. Magneto-Rheological Fluid Damper Having Enhanced on-State Yield Strength. US Patent App. 12/477,101, 10 December 2009. [Google Scholar]
- Park, B.J.; Fang, F.F.; Choi, H.J. Magnetorheology: Materials and application. Soft Matter 2010, 6, 5246–5253. [Google Scholar] [CrossRef]
- De Vicente, J. Magnetorheology: A review. Ibero-Am. J. Rheol. 2013, 1, 1–18. [Google Scholar]
- Skjeltorp, A.T. One- and Two-Dimensional Crystallization of Magnetic Holes. Phys. Rev. Lett. 1983, 51, 2306–2309. [Google Scholar] [CrossRef]
- Felicia, L.J.; Vinod, S.; Philip, J. Recent Advances in Magnetorheology of Ferrofluids (Magnetic Nanofluids), A Critical Review. J. Nanofluids 2016, 5, 1–22. [Google Scholar] [CrossRef]
- Ramos, J.; Klingenberg, D.J.; Hidalgo-Alvarez, R.; de Vicente, J. Steady shear magnetorheology of inverse ferrofluids. J. Rheol. 2011, 55, 127–152. [Google Scholar] [CrossRef]
- Ruiz-López, J.A.; Fernández-Toledano, J.C.; Klingenberg, D.J.; Hidalgo-Alvarez, R.; de Vicente, J. Model magnetorheology: A direct comparative study between theories, particle-level simulations and experiments, in steady and dynamic oscillatory shear. J. Rheol. 2016, 60, 61–74. [Google Scholar] [CrossRef]
- Liu, Y.D.; Lee, J.; Choi, S.B.; Choi, H.J. Silica-coated carbonyl iron microsphere based magnetorheological fluid and its damping force characteristics. Smart Mater. Struct. 2013, 22, 065022. [Google Scholar] [CrossRef]
- Odenbach, P.S. Ferrofluids. J. Phys. Condens. Matter 2006, 18. Available online: http://stacks.iop.org/0953-8984/18/i=38/a=E01 (accessed on 18 July 2016). [Google Scholar] [CrossRef]
- Papell, S. Low Viscosity Magnetic Fluid Obtained by the Colloidal Suspension Of Magnetic Particles. US Patent 3,215,572, 11 February 1965. [Google Scholar]
- Rosensweig, R.E. Ferrofluid Compositions and Process of Making Same. US Patent 3,917,538, 4 November 1975. [Google Scholar]
- Genc, S.; Derin, B. Synthesis and rheology of ferrofluids: A review. Curr. Opin. Chem. Eng. 2014, 3, 118–124. [Google Scholar] [CrossRef]
- López-López, M.T.; Gómez-Ramírez, A.; Rodríguez-Arco, L.; Durán, J.D.G.; Iskakova, L.; Zubarev, A. Colloids on the Frontier of Ferrofluids. Rheological Properties. Langmuir 2012, 28, 6232–6245. [Google Scholar] [CrossRef] [PubMed]
- Leo, B.; Rudolph, L. Viscous Damper Using Magnetic Ferrofluid. US Patent 3,538,469, 3 November 1970. [Google Scholar]
- Moskowitz, R.; Stahl, P.; Reed, W. Inertia Damper Using Ferrofluid. US Patent 4,123,675, 31 October 1978. [Google Scholar]
- Raj, K.; Moskowitz, B.; Casciari, R. Advances in ferrofluid technology. J. Magn. Magn. Mater. 1995, 149, 174–180. [Google Scholar] [CrossRef]
- Magnetic Fluids Deliver Better Speaker Sound Quality. National Aeronautics and Space Administration. Technology Transfer Program. Available online: https://spinoff.nasa.gov/Spinoff2015/pdf/Spinoff2015.pdf (accessed on 18 July 2016).
- Tsuda, S.; Rosensweig, R. Ferrofluid Centered Voice Coil Speaker. US Patent 20,070,189,577 A1, 16 August 2007. [Google Scholar]
- Fujita, T.; Yoshino, K. Electrorheological Magnetic Fluid and Process for Producing the Same. US Patent 5,507,967 A, 16 April 1996. [Google Scholar]
- Gernon, C. Electromagnetic Rheological (EMR) Fluid and Method for Using the EMR Fluid. US Patent 7,422,709, 9 September 2008. [Google Scholar]
- Fujita, T.; Mochizuki, J.; Lin, I. Viscosity of electrorheological magneto-dielectric fluid under electric and magnetic fields. J. Magn. Magn. Mater. 1993, 122, 29–33. [Google Scholar] [CrossRef]
- Minagawa, K.; Watanabe, T.; Munakata, M.; Koyama, K. A novel apparatus for rheological measurements of electro-magneto-rheological fluids. J. Non-Newton. Fluid Mech. 1994, 52, 59–67. [Google Scholar] [CrossRef]
- Koyama, K.; Minagawa, K.; Watanabe, T.; Kumakura, Y.; ichi Takimoto, J. Electro-magneto-rheological effects in parallel-field and crossed-field systems. J. Non-Newton. Fluid Mech. 1995, 58, 195–206. [Google Scholar] [CrossRef]
- Suokui, T.; Song, J.; Yansong, Z.; Hongyan, G.; Li, Q.; Min, W. Ni/TiO2-Based Electromagnetic Rheological Liquid With Electromagnetic Coupling Effect and Preparation Method Thereof. CN Patent 101,967,421 B, 11 September 2013. [Google Scholar]
- Gao, S.J. Electromagnetic Current Change Fluid Intelligent Vibration Isolator. CN Patent 2,846,887 (Y), 13 December 2006. [Google Scholar]
- Suokui, T.; Song, J.; Yansong, Z.; Hongyan, G.; Li, Q.; Min, W. Engine Suspension Device Using Electro-Magneto-Rheological Fluid. CN Patent 102,434,619 B, 2 May 2012. [Google Scholar]
- Ocalan, M.; Tu, H.; Wicks, N.; Robisson, A.; Guillot, D. Field-Responsive Fluids. US Patent 8,506,837, 13 August 2013. [Google Scholar]
- Norrick, N.; Dohnal, F.; Bauer, J. Low-frequency dynamics of an electrorheological fluid in squeeze and shear mode. Part I: Experiments. J. Vib. Control 2015, 21, 835–844. [Google Scholar] [CrossRef]
- McIntyre, E.C. Compression of Smart Materials: Squeeze Flow of Electrorheological and Magnetorheological Fluids. PhD Thesis, University of Michigan, Ann Arbor, MI, USA, 25 August 2008. [Google Scholar]
- Nguyen, T.M.; Ciocanel, C.; Elahinia, M.H. A Squeeze-Flow Mode Magnetorheological Mount: Design, Modeling, and Experimental Evaluation. J. Vib. Acoust. 2012, 134, 021013. [Google Scholar] [CrossRef]
- Williams, E.; Rigby, S.; Sproston, J.; Stanway, R. Electrorheological fluids applied to an automotive engine mount. J. Non-Newton. Fluid Mech. 1993, 47, 221–238. [Google Scholar] [CrossRef]
- Wahed, A.; Sproston, J.; Stanway, R. The performance of an electrorheological fluid in dynamic squeeze flow under constant voltage and constant field. J. Phys. D Appl. Phys. 1998, 31, 2964–2974. [Google Scholar] [CrossRef]
- Wahed, A.K.E.; Sproston, J.L.; Williams, E.W. The effect of a time-dependent electric field on the dynamic performance of an electrorheological fluid in squeeze. J. Phys. D Appl. Phys. 2000, 33, 2995. [Google Scholar] [CrossRef]
- De Vicente, J.; Ruiz-López, J.A.; Andablo-Reyes, E.; Segovia-Guitérrez, J.P.; Hidalgo-Álvarez, R. Squeeze flow magnetorheology. J. Rheol. 2011, 55, 753–779. [Google Scholar] [CrossRef]
- Ruiz-López, J.A.; Hidalgo-Álvarez, R.; de Vicente, J. Continuous media theory for MR fluids in non-shearing flows. J. Phys. Conf. Ser. 2013, 412, 012057. [Google Scholar] [CrossRef]
- Guo, C.Y.; Gong, X.; Xuan, S.; Yan, Q.; Ruan, X. Squeeze behavior of magnetorheological fluids under constant volume and uniform magnetic field. Smart Mater. Struct. 2013, 22, 045020. [Google Scholar] [CrossRef]
- Guo, C.Y.; Gong, X.L.; Xuan, S.H.; Qin, L.J.; Yan, Q.F. Compression behaviors of magnetorheological fluids under nonuniform magnetic field. Rheol. Acta 2013, 52, 160–176. [Google Scholar] [CrossRef]
- Galindo-Rosales, F.J.; Segovia-Gutiérrez, J.P.; Pinho, F.T.; Alves, M.A.; de Vicente, J. Extensional rheometry of magnetic dispersions. J. Rheol. 2015, 59, 193–209. [Google Scholar] [CrossRef]
- Hartsock, D.L.; Novak, R.F.; Chaundy, G.J. ER fluid requirements for automotive devices. J. Rheol. 1991, 35, 1305–1326. [Google Scholar] [CrossRef]
- Weitzenhof, D.; Watanabe, I.; Maria, C.; Niaura, W.; McKinley, G. Splined Vibration Damping Device Using ER Fluids. US Patent 5,588,509, 31 December 1996. [Google Scholar]
- Lindler, J.E.; Wereley, N.M. Double Adjustable Shock Absorbers Using Electrorheological Fluid. J. Intell. Mater. Syst. Struct. 1999, 10, 652–657. [Google Scholar] [CrossRef]
- Khusid, B.; Acrivos, A.; Khodorkovsky, Y.; Beltran, M. Electrorheological Squeeze-Flow Shock Absorber. Int. J. Mod. Phys. B 1999, 13, 2143–2150. [Google Scholar] [CrossRef]
- John, S.; Chaudhuri, A.; Wereley, N.M. A magnetorheological actuation system: Test and model. Smart Mater. Struct. 2008, 17, 025023. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B.; Park, Y.G. An analytical approach to optimally design of electrorheological fluid damper for vehicle suspension system. Meccanica 2012, 47, 1633–1647. [Google Scholar] [CrossRef]
- Jacob, R. Magnetic Fluid Shock Absorber. US Patent 2,667,237, 26 January 1954. [Google Scholar]
- Miller, D. Magnetic Viscous Damper. US Patent 4,200,003, 29 April 1980. [Google Scholar]
- Carlson, J.; Chrzan, M. Magnetorheological Fluid Dampers. US Patent 5,277,281, 11 January 1994. [Google Scholar]
- Carlson, J.; Chrzan, M.; James, F. Magnetorheological Fluid Devices. US Patent 5,284,330, 8 February 1994. [Google Scholar]
- Mokeddem, M. Magneto-Rheological Torsional Vibration Damper. US Patent 5,829,319, 3 November 1998. [Google Scholar]
- Card, J. Tuneable Steering Damper Using Magneto-Rheological Fluid. US Patent App. 09/773,071, 15 April 2003. [Google Scholar]
- Oliver, M.; Kruckemeyer, W.; Jensen, E. Magnetorheological Damper With Piston Bypass. US Patent 6,419,058, 16 July 2002. [Google Scholar]
- Wittig, M. Magnetorheological Fluid Damper. US Patent App. 10/205,514, 30 January 2003. [Google Scholar]
- Edmondson, J.; Coombs, J.; Osorio, C. Magnetorheological Fluid-Controlled Vehicle Suspension Damper. US Patent 6,681,905, 27 January 2004. [Google Scholar]
- Han, Y.M.; Choi, S.B. Force-feedback control of a spherical haptic device featuring an electrorheological fluid. Smart Mater. Struct. 2006, 15, 1438. [Google Scholar] [CrossRef]
- Berasategui, J.; Elejabarrieta, M.J.; Bou-Ali, M.M. Characterization analysis of a MR damper. Smart Mater. Struct. 2014, 23, 045025. [Google Scholar] [CrossRef]
- Zhu, X.; Jing, X.; Cheng, L. Magnetorheological fluid dampers: A review on structure design and analysis. J. Intell. Mater. Syst. Struct. 2012, 23, 839–873. [Google Scholar] [CrossRef]
- Carlson, J.; Coulter, J.; Duclos, T. Electrorheological Fluid Composite Structures. US Patent 4,923,057, 8 May 1990. [Google Scholar]
- Weiss, K.; Duclos, T.; Chrzan, M.; Yanyo, L. Magnetorheological Fluid Composite Structures. US Patent 5,547,049, 20 August 1996. [Google Scholar]
- Hubbard, J. Method and Apparatus Using a Piezoelectric Film for Active Control Of Vibrations. US Patent 4,565,940, 21 January 1986. [Google Scholar]
- Sunar, M. Recent Advances in Sensing and Control of Flexible Structures Via Piezoelectric Materials Technology. Appl. Mech. Rev. 1999, 52, 1–16. [Google Scholar] [CrossRef]
- Jiang, J. Embedded Magnetic Rheological Fluid Intelligent Material Sandwich Structure. CN Patent 100,424,793, 8 October 2008. [Google Scholar]
- Eshaghi, M.; Sedaghati, R.; Rakheja, S. Dynamic characteristics and control of magnetorheological/ electrorheological sandwich structures: A state-of-the-art review. J. Intell. Mater. Syst. Struct. 2015, 1–35. [Google Scholar] [CrossRef]
- Carlson, J. Electrophoretic Fluid Composite Structure. US Patent 5,068,018, 26 November 1991. [Google Scholar]
- Rosenberg, L. Variable Support Footwear Using Electrorheological or Magnetorheological Fluids. US Patent App. 11/354,667, 9 November 2006. [Google Scholar]
- De Dios García, D.; Iglesias, G.; Delgado, M.; González, C.; Ahualli, S. Footwear With Shock-Absorbing Effect. WO Patent App. PCT/ES2007/000,266, 8 November 2007. [Google Scholar]
- Meschter, J.; Chamblin, M.; Owings, A. Support Members With Variable Viscosity Fluid for Footwear. US Patent 9,198,478, 1 December 2015. [Google Scholar]
- Fischell, R.; Kiger, K.; Williams, A. Device to Prevent Brain Damage From a Severe Impact to an Athlete’s Head. US Patent App. 14/176,623, 13 August 2015. [Google Scholar]
- Hoffman, R.L. Discontinuous and dilatant viscosity behavior in concentrated suspensions. II. Theory and experimental tests. J. Colloid Interface Sci. 1974, 46, 491–506. [Google Scholar] [CrossRef]
- Barnes, H.A. Shear-Thickening (Dilatancy) in Suspensions of Nonaggregating Solid Particles Dispersed in Newtonian Liquids. J. Rheol. 1989, 32, 329–366. [Google Scholar] [CrossRef]
- Hoffman, R.L. Explanations for the cause of shear thickening in concentrated colloidal suspensions. J. Rheol. 1998, 42, 111–123. [Google Scholar] [CrossRef]
- Corwin, E.; Jaeger, H.; Nagel, S. Structural signature of jamming in granular media. Nature 2005, 435, 7045. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Forman, N.A.; Orellana, C.S.; Zhang, H.; Maynor, B.W.; Betts, D.E.; DeSimone, J.M.; Jaeger, H.M. Generality of shear thickening in dense suspensions. Nat. Mater. 2010, 9, 220–224. [Google Scholar] [CrossRef] [PubMed]
- Wagner, N.J.; Brady, J.F. Shear thickening in colloidal dispersions. Phys. Today 2009, 62, 27–32. [Google Scholar] [CrossRef]
- Brown, E.; Zhang, H.; Forman, N.A.; Maynor, B.W.; Betts, D.E.; DeSimone, J.M.; Jaeger, H.M. Shear thickening in densely packed suspensions of spheres and rods confined to few layers. J. Rheol. 2010, 54, 1023–1046. [Google Scholar] [CrossRef]
- Mewis, J.; Wagner, N.J. Colloidal Suspension Rheology; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Peters, I.R.; Majumdar, S.; Jaeger, H.M. Direct observation of dynamic shear jamming in dense suspensions. Nature 2016, 532, 214–217. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Jaeger, H.M. Through Thick and Thin. Science 2011, 333, 1230–1231. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Jaeger, H.M. Shear thickening in concentrated suspensions: Phenomenology, mechanisms and relations to jamming. Rep. Prog. Phys. 2014, 77, 046602. [Google Scholar] [CrossRef] [PubMed]
- Seto, R.; Mari, R.; Morris, J.F.; Denn, M.M. Discontinuous Shear Thickening of Frictional Hard-Sphere Suspensions. Phys. Rev. Lett. 2013, 111, 218301. [Google Scholar] [CrossRef] [PubMed]
- Mari, R.; Seto, R.; Morris, J.F.; Denn, M.M. Nonmonotonic flow curves of shear thickening suspensions. Phys. Rev. E 2015, 91, 052302. [Google Scholar] [CrossRef] [PubMed]
- Mari, R.; Seto, R.; Morris, J.F.; Denn, M.M. Discontinuous shear thickening in Brownian suspensions by dynamic simulation. Proc. Natl. Acad. Sci. USA 2015, 112, 15326–15330. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.S.; Wetzel, E.D.; Wagner, N.J. The ballistic impact characteristics of Kevlar woven fabrics impregnated with a colloidal shear thickening fluid. J. Mater. Sci. 2003, 38, 2825–2833. [Google Scholar] [CrossRef]
- Dawson, M.; McKinley, G.H.; Gibson, L.J. The Dynamic Compressive Response of an Open-Cell Foam Impregnated With a non-Newtonian Fluid. J. Appl. Mech. 2008, 75, 041015. [Google Scholar] [CrossRef]
- Fischer, C.; Bennani, A.; Michaud, V.; Jacqueline, E.; Manson, J.A.E. Structural damping of model sandwich structures using tailored shear thickening fluid compositions. Smart Mater. Struct. 2010, 19, 035017. [Google Scholar] [CrossRef]
- Bender, J.W.; Shenoy, S.S.; Wagner, N.J. E-FiRST: Electric Field Responsive Shear Thickening Fluids. Rheol. Acta 2003, 42, 287–294. [Google Scholar]
- Jolly, M.; Bender, J. Field Responsive Shear Thickening Fluid. US Patent App. 11/451,854, 19 October 2006. [Google Scholar]
- Galindo-Rosales, F.; Rubio-Herndez, F.; Sevilla, A. An apparent viscosity function for shear thickening fluids. J. Non-Newton. Fluid Mech. 2011, 166, 321–325. [Google Scholar] [CrossRef]
- Galindo-Rosales, F.; Rubio-Hernńdez, F.; Sevilla, A.; Ewoldt, R. How Dr. Malcom M. Cross may have tackled the development of ‘An apparent viscosity function for shear thickening fluids’. J. Non-Newton. Fluid Mech. 2011, 166, 1421–1424. [Google Scholar] [CrossRef]
- David, J.; Filip, P.; Kharlamov, A.A. Empirical Modelling of Nonmonotonous Behaviour of Shear Viscosity. Adv. Mater. Sci. Eng. 2004, 14, 658187. [Google Scholar] [CrossRef]
- Lee, Y.S.; Wagner, N.J. Dynamic properties of shear thickening colloidal suspensions. Rheol. Acta 2003, 42, 199–208. [Google Scholar]
- Egres, R.G.; Wagner, N.J. The rheology and microstructure of acicular precipitated calcium carbonate colloidal suspensions through the shear thickening transition. J. Rheol. 2005, 49, 719–746. [Google Scholar] [CrossRef]
- Egres, R.G.; Nettesheim, F.; Wagner, N.J. Rheo-SANS investigation of acicular-precipitated calcium carbonate colloidal suspensions through the shear thickening transition. J. Rheol. 2006, 50, 685–709. [Google Scholar] [CrossRef]
- Raghavan, S.R.; Walls, H.J.; Khan, S.A. Rheology of silica dispersions in organic liquids: New evidence of solvations forces dictated by hidrogen bonding. Langmuir 2000, 16, 7920–7930. [Google Scholar] [CrossRef]
- Fischer, C.; Plummer, C.J.G.; Michaud, V.; Bourban, P.E.; Manson, J.A.E. Pre- and post-transition behavior of shear-thickening fluids in oscillating shear. Rheol. Acta 2007, 46, 1099–1108. [Google Scholar] [CrossRef]
- Fall, A.; Huang, N.; Bertrand, F.; Ovarlez, G.; Bonn, D. Shear Thickening of Cornstarch Suspensions as a Reentrant Jamming Transition. Phys. Rev. Lett. 2008, 100, 018301. [Google Scholar] [CrossRef] [PubMed]
- Chellamuthu, M.; Arndt, E.M.; Rothstein, J.P. Extensional rheology of shear thickening nano particle suspensions. Soft Matter 2009, 5, 2117–2124. [Google Scholar] [CrossRef]
- White, E.E.B.; Chellamuthu, M.; Rothstein, J.P. Extensional rheology of a shear thickening cornstarch and water suspension. Rheol. Acta 2010, 49, 119–129. [Google Scholar] [CrossRef]
- Smith, M.; Besseling, R.; Cates, M.; Bertola, V. Dilatancy in the flow and fracture of stretched colloidal suspensions. Nat. Commun. 2010, 1. [Google Scholar] [CrossRef] [PubMed]
- Roche, M.; Kellay, H.; Stone, H.A. Heterogeneity and the Role of Normal Stresses during the Extensional Thinning of Non-Brownian Shear-Thickening Fluids. Phys. Rev. Lett. 2011, 107, 34503. [Google Scholar] [CrossRef] [PubMed]
- Soutrenon, M.; Michaud, V. Energy dissipation in concentrated monodisperse colloidal suspensions of silica particles in polyethylene glycol. Colloid Polym. Sci. 2014, 292, 3291–3299. [Google Scholar] [CrossRef]
- Smith, M. Fracture of Jammed Colloidal Suspensions. Sci. Rep. 2015, 5, 14175. [Google Scholar] [CrossRef] [PubMed]
- Khandavalli, S.; Rothstein, J.P. Large amplitude oscillatory shear rheology of three different shear-thickening particle dispersions. Rheol. Acta 2015, 54, 601–618. [Google Scholar] [CrossRef]
- Ding, J.; Tracey, P.; Li, W.H.; Peng, G.; Whitten, P.G.; Wallace, G.G. Review on Shear Thickening Fluids and Applications. Text. Light Ind. Sci. Technol. (TLIST) 2013, 2, 161–173. [Google Scholar]
- Wagner, N.; Nam, C. Process for Coating a Shear Thickening Fluid Onto a Material. WO Patent App. PCT/US2007/070,493, 26 June 2008. [Google Scholar]
- Plant, D. Flexible Energy Absorbing Material and Methods of Manufacture Thereof. US Patent 7,608,314, 27 October 2004. [Google Scholar]
- Wagner, N.; Kirkwood, J.; Egres, R. Shear Thickening Fluid Containment in Polymer Composites. US Patent App. 11/260,742, 27 October 2005. [Google Scholar]
- Green, P.; Palmer, R. Energy Absorbing Blends. US Patent App. 10/561,763, 8 February 2007. [Google Scholar]
- Palmer, R.; Green, P. Energy Absorbing Material. US Patent 7,381,460, 3 June 2008. [Google Scholar]
- Neagu, R.C.; Bourban, P.E.; Manson, J.A.E.J. Micromechanics and damping properties of composites integrating shear thickening fluids. Compos. Sci. Technol. 2009, 69, 515–522. [Google Scholar] [CrossRef]
- Ferguson, J. Impact Shock Absorbing Material. US Patent 8,087,101, 3 January 2012. [Google Scholar]
- Preparation Method of Polyurethane Energy-Absorbing Material. CN Patent 103,145,941, 11 March 2015.
- Barnes, H.A.; Hutton, J.F.; Walters, K. An introduction to Rheology; Rheology Series; Elsevier Science Publishers B.V.: Amsterdam, The Netherlands, 1993; Volume 3. [Google Scholar]
- Morrison, F.A. Understanding Rheology; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Bird, R.B.; Armstrong, R.C.; Hassager, O. Dynamics of Polymer Liquids. Volume 1—Fluid Mechanics, 2nd ed.; John Wiley and Sons Inc.: New York, NY, USA, 1987. [Google Scholar]
- Bird, R.B.; Curtis, C.; Armstrong, R.C.; Hassager, O. Dynamics of Polymer Liquids. Volume 2 —Kinetic Theory, 2nd ed.; John Wiley and Sons Inc.: New York, NY, USA, 1987. [Google Scholar]
- Larson, R.G. The Structure and Rheology of Complex Fluids; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Larson, R.; Desai, P.S. Modeling the Rheology of Polymer Melts and Solutions. Ann. Rev. Fluid Mech. 2015, 47, 47–65. [Google Scholar] [CrossRef]
- Hyun, K.; Wilhelm, M.; Klein, C.O.; Cho, K.S.; Nam, J.G.; Ahn, K.H.; Lee, S.J.; Ewoldt, R.H.; McKinley, G.H. A review of nonlinear oscillatory shear tests: Analysis and application of large amplitude oscillatory shear (LAOS). Prog. Polym. Sci. 2011, 36, 1697–1753. [Google Scholar] [CrossRef]
- Ewoldt, R.H.; Bharadwaj, N.A. Low-dimensional intrinsic material functions for nonlinear viscoelasticity. Rheol. Acta 2013, 52, 201–219. [Google Scholar] [CrossRef]
- Bharadwaj, N.A.; Ewoldt, R.H. Constitutive model fingerprints in medium-amplitude oscillatory shear. J. Rheol. 2015, 59, 557–592. [Google Scholar] [CrossRef]
- Corman, R.E.; Rao, L.; Ashwin Bharadwaj, N.; Allison, J.T.; Ewoldt, R.H. Setting Material Function Design Targets for Linear Viscoelastic Materials and Structures. J. Mech. Des. 2016, 138, 051402. [Google Scholar] [CrossRef]
- Ewoldt, R.H. Extremely Soft: Design with Rheologically Complex Fluids. Soft Robot. 2014, 1, 12–20. [Google Scholar] [CrossRef]
- Lewandowski, R.; Chorazyczewski, B. Remarks on Modelling of Passive Viscoelastic Dampers. 9th International Conference on Modern Building Materials, Structures and Techniques. 2007. Available online: http://leidykla.vgtu.lt/conferences/MBM2007/4pdf/LewanChora.pdf (accessed on 18 July 2016).
- Butaud, P.; Foltete, E.; Ouisse, M. Sandwich structures with tunable damping properties: On the use of Shape Memory Polymer as viscoelastic core. Compos. Struct. 2016, 153, 401–408. [Google Scholar] [CrossRef]
- Vicoda, G. Isolating, damping tuning. Product Folder. 2015. Available online: http://www.vicoda-gmbh.com/ images/downloads/VICODA-Product-Folder-UK-web.pdf (accessed on 18 July 2016).
- Makris, N.; Dargush, G.F.; Constantinou, M.C. Dynamic Analysis of Viscoelastic-Fluid Dampers. J. Eng. Mech. 1995, 121, 1114–1121. [Google Scholar] [CrossRef]
- Park, S. Analytical modeling of viscoelastic dampers for structural and vibration control. Int. J. Solids Struct. 2001, 38, 8065–8092. [Google Scholar] [CrossRef]
- Helber, R.; Doncker, F.; Bung, R. Vibration attenuation by passive stiffness switching mounts. J. Sound Vib. 1990, 138, 47–57. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Li, W.H.; Gong, X.L. The rheology of shear thickening fluid (STF) and the dynamic performance of an STF-filled damper. Smart Mater. Struct. 2008, 17, 035027. [Google Scholar] [CrossRef]
- Gaines, D.; Mueller, P. Non-Newtonian Stress Thickening Fluid Vibration Damper System for Vehicle Seat. US Patent 8,590,966, 26 November 2013. [Google Scholar]
- Zhou, H.; Yan, L.; Jiang, W.; Xuan, S.; Gong, X. Shear thickening fluid-based energy-free damper: Design and dynamic characteristics. J. Intell. Mater. Syst. Strust. 2014. [Google Scholar] [CrossRef]
- Robinovitch, S.N.; Hayes, W.C.; McMahon, T.A. Energy-Shunting Hip Padding System Attenuates Femoral Impact Force in a Simulated Fall. J. Biomech. Eng. 1995, 117, 409–413. [Google Scholar] [CrossRef] [PubMed]
- Rhoades, L.; Matechen, J.; Rosner, M. Smart Padding System Utilizing an Energy Absorbent Medium and Articles Made Therefrom. US Patent 6,701,529, 9 March 2004. [Google Scholar]
- Dawson, M.A. Modeling the Dynamic Response of Low-Density, Reticulated, Elastomeric Foam Impregnated With Newtonian and Non-Newtonian Fluids. PhD Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, June 2008. [Google Scholar]
- Tan, Z.; Zuo, L.; Li, W.; Liu, L.; Zhai, P. Dynamic response of symmetrical and asymmetrical sandwich plates with shear thickening fluid core subjected to penetration loading. Mater. Des. 2016, 94, 105–110. [Google Scholar] [CrossRef]
- Fischer, C.; Braun, S.A.; Bourban, P.E.; Michaud, V.; Plummer, C.J.G.; Manson, J.A.E. Dynamic properties of sandwich structures with integrated shear-thickening fluids. Smart Mater. Struct. 2006, 15, 1467–1475. [Google Scholar] [CrossRef]
- Fischer, C.; Neagu, R.; Bourban, P.; MICHAUD, V.; Plummer, C.; Lavanchy, S.; Manson, J. Structures With Adaptive Stiffness and Damping Integrating Shear Thickening Fluids. WO Patent App. PCT/IB2008/054,416, 30 April 2009. [Google Scholar]
- Dawson, M. Composite plates with a layer of fluid-filled, reticulated foam for blast protection of infrastructure. Int. J. Impact Eng. 2009, 36, 1288–1295. [Google Scholar] [CrossRef]
- Soutrenon, M.; Michaud, V. Impact properties of shear thickening fluid impregnated foams. Smart Mater. Struct. 2014, 23, 035022. [Google Scholar] [CrossRef]
- Galindo-Rosales, F.; Martt́nez-Aranda, S.; Campo-Deańo, L. CorkSTFµfluidics—A novel concept for the development of eco-friendly light-weight energy absorbing composites. Mater. Des. 2015, 82, 326–334. [Google Scholar]
- Coelho, R.; Alves de Sousa, R.; Fernandes, F.; Teixeira-Dias, F. New composite liners for energy absorption purposes. Mater. Des. 2013, 43, 384–392. [Google Scholar] [CrossRef]
- Galindo-Rosales, F.; Campo-Deaño, L. Composite layer material for dampening external load, obtaining process, and uses thereof, 2015. WO Patent App. PCT/IB2015/057399, 7 April 2016. [Google Scholar]
- Bettin, G.; Deshmukh, S.; McKinley, G. Active Controlled Energy Absorber Using Responsive Fluids. US Patent App. 11/270,971, 1 March 2011. [Google Scholar]
- Piccirillo, C. Cork-based Energy Absorbing Composite Material With Microchannels. 2014. Available online: http://www.decodedscience.org/cork-based-energy-absorbing-composite-material-microchannels (accessed on 18 July 2016).
- Galindo-Rosales, F.; Pires, B.; Martínez-Aranda, S.; Campo-Deaño, L. Absorbed energy by shear thickening fluids confined in microfluidic patterns subjected to impact tests. International Conference Flowing Matter, Porto (Portugal), 2016. Available online: http://www.campodeano.com/FlowingMatter/Homefiles/Book%20of%20Abstracts.pdf (accessed on 18 July 2016).
- Wagner, N.; Wetzel, E. Advanced Body Armor Utilizing Shear Thickening Fluids. US Patent 7,498,276, 3 March 2009. [Google Scholar]
- Majumdar, A.; Butola, B.S.; Srivastava, A. An analysis of deformation and energy absorption modes of shear thickening fluid treated Kevlar fabrics as soft body armour materials. Mater. Des. 2013, 51, 148–153. [Google Scholar] [CrossRef]
- Majumdar, A.; Butola, B.S.; Srivastava, A. Optimal designing of soft body armour materials using shear thickening fluid. Mater. Des. 2013, 46, 191–198. [Google Scholar] [CrossRef]
- Majumdar, A.; Butola, B.S.; Srivastava, A. Development of soft composite materials with improved impact resistance using Kevlar fabric and nano-silica based shear thickening fluid. Mater. Des. 2014, 54, 295–300. [Google Scholar] [CrossRef]
- Lee, B.W.; Kim, C.G. Computational analysis of shear thickening fluid impregnated fabrics subjected to ballistic impacts. Adv. Compos. Mater. 2012, 21, 177–192. [Google Scholar] [CrossRef]
- Kang, T.J.; Kim, C.Y.; Hong, K.H. Rheological behavior of concentrated silica suspension and its application to soft armor. J. Appl. Polym. Sci. 2012, 124, 1534–1541. [Google Scholar] [CrossRef]
- Decker, M.J.; Halbach, C.J.; Nam, C.H.; Wagner, N.J.; Wetzel, E.D. Stab resistance of shear thickening fluid (STF)-treated fabrics. Compos. Sci. Technol. 2007, 67, 565–578. [Google Scholar] [CrossRef]
- Feng, X.; Li, S.; Wang, Y.; Wang, Y.; Liu, J. Effects of different silica particles on quasi-static stab resistant properties of fabrics impregnated with shear thickening fluids. Mater. Des. 2014. [Google Scholar] [CrossRef]
- Zetune, K.; Dombrowski, R.; Day, J.; Wagner, N. Puncture and/or Cut Resistant Glove Having Maximized Dexterity, Tactility, and Comfort. US Patent App. 13/639,740, 2 April 2014. [Google Scholar]
- Kirshon, J. Liquid-Gel Impact Reaction Liner. US Patent App. 12/928,804, 21 Junuary 2012. [Google Scholar]
- Pannikottu, A.; Abraham, A. Football Helmet Liner to Reduce Concussions and Traumatic Brain Injuries. US Patent App. 14/445,645, 5 February 2015. [Google Scholar]
- Holt, S.; Perez, M. Impact Resistant, Torsion-Reducing Protective Athletic Gear Using Shear Thickening Fluid. US Patent 9,193,890, 24 November 2015. [Google Scholar]
- Srivastava, A.; Majumdar, A.; Butola, B.S. Improving the Impact Resistance of Textile Structures by using Shear Thickening Fluids: A Review. Crit. Rev. Solid State Mater. Sci. 2012, 37, 115–129. [Google Scholar] [CrossRef]
- Cohen, D. Shear-Thickening Fluid Reinforced Fabrics for Use With an Expandable Spacecraft. US Patent App. 11/807,830, 4 December 2008. [Google Scholar]
- Park, Y.; Baluch, A.; Kim, Y.; Kim, C.G. High Velocity Impact Characteristics of Shear Thickening Fluid Impregnated Kevlar Fabric. Int. J. Aeronaut. Space Sci. 2013, 25, 140–145. [Google Scholar] [CrossRef]
- Chen, P.; Wereley, N. Magnetorheological Damper and Energy Dissipation Method. US Patent 6,694,856, 24 February 2004. [Google Scholar]
- Deshmukh, S.; McKinley, G. Fluid-Filled Cellular Solids for Controlled. US Patent App. 10/378,129, 9 September 2004. [Google Scholar]
- Allen, S. Body Limb Movement Limiter. US Patent 7,402,147, 22 July 2008. [Google Scholar]
- Wetzel, E.; Nenno, P. Rate-Responsive, Stretchable Devices. US Patent 9,303,717, 5 April 2016. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Active-Fluids | Passive-Fluids | ||
|---|---|---|---|---|
| + | - | + | - | |
| Dampers | Versatility | Settling | Low cost | Unadaptability |
| Redispersibility | ||||
| Sandwich structures | Versatility | Settling | Low cost | Unadaptability |
| Heavy-weight | ||||
| Body armor | Versatility | Power dependence | Power independence | Unadaptability |
| Heavy-weight | Light-weight | |||
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galindo-Rosales, F.J. Complex Fluids in Energy Dissipating Systems. Appl. Sci. 2016, 6, 206. https://doi.org/10.3390/app6080206
Galindo-Rosales FJ. Complex Fluids in Energy Dissipating Systems. Applied Sciences. 2016; 6(8):206. https://doi.org/10.3390/app6080206
Chicago/Turabian StyleGalindo-Rosales, Francisco J. 2016. "Complex Fluids in Energy Dissipating Systems" Applied Sciences 6, no. 8: 206. https://doi.org/10.3390/app6080206
APA StyleGalindo-Rosales, F. J. (2016). Complex Fluids in Energy Dissipating Systems. Applied Sciences, 6(8), 206. https://doi.org/10.3390/app6080206