A Model-Assisted Reduced-Order ESO Based Cascade Controller for Sensorless Control of Independent Gear-Shifting Actuators


Abstract
:1. Introduction
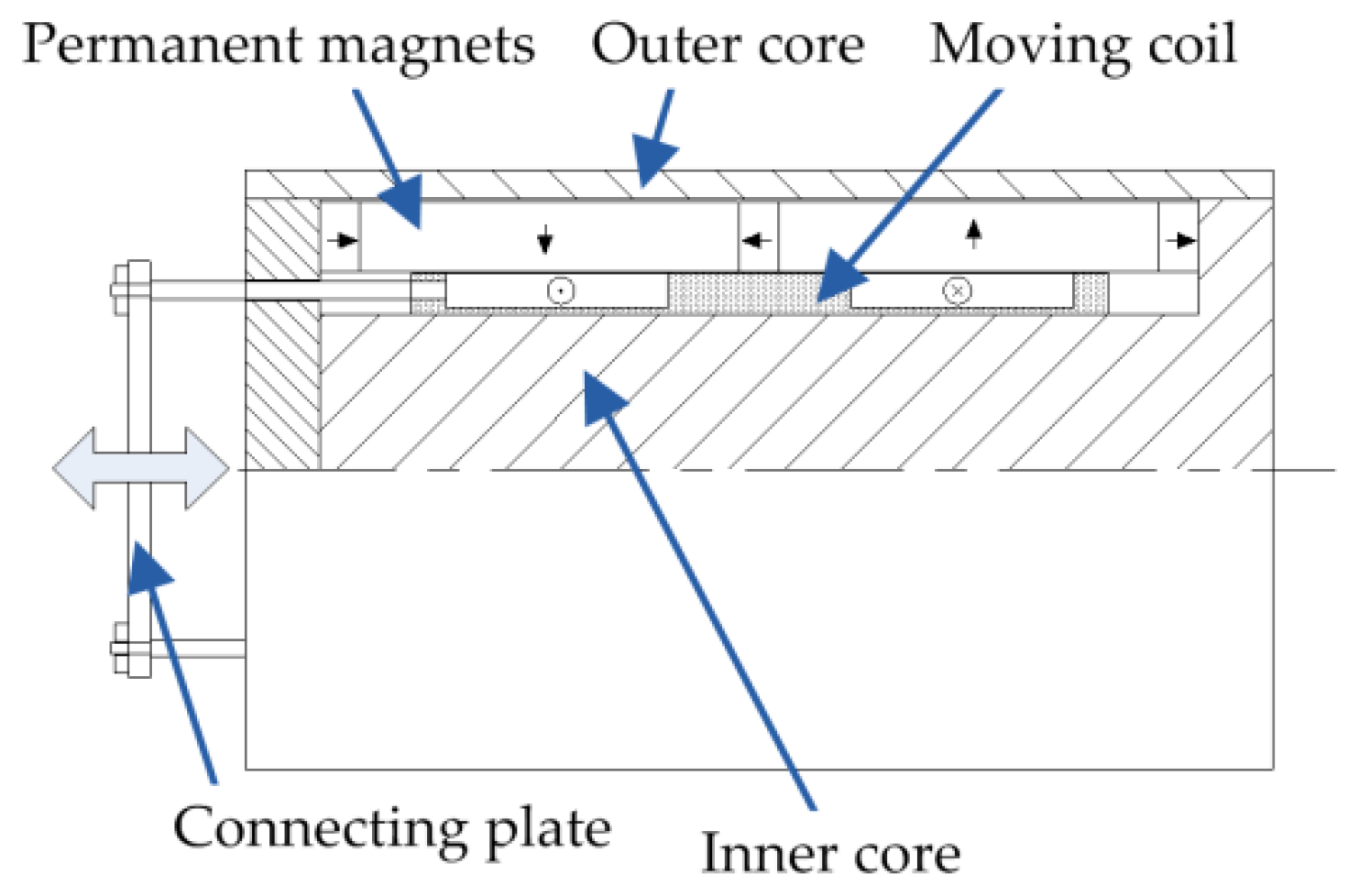
2. System Overview and Modeling
3. Velocity Estimator
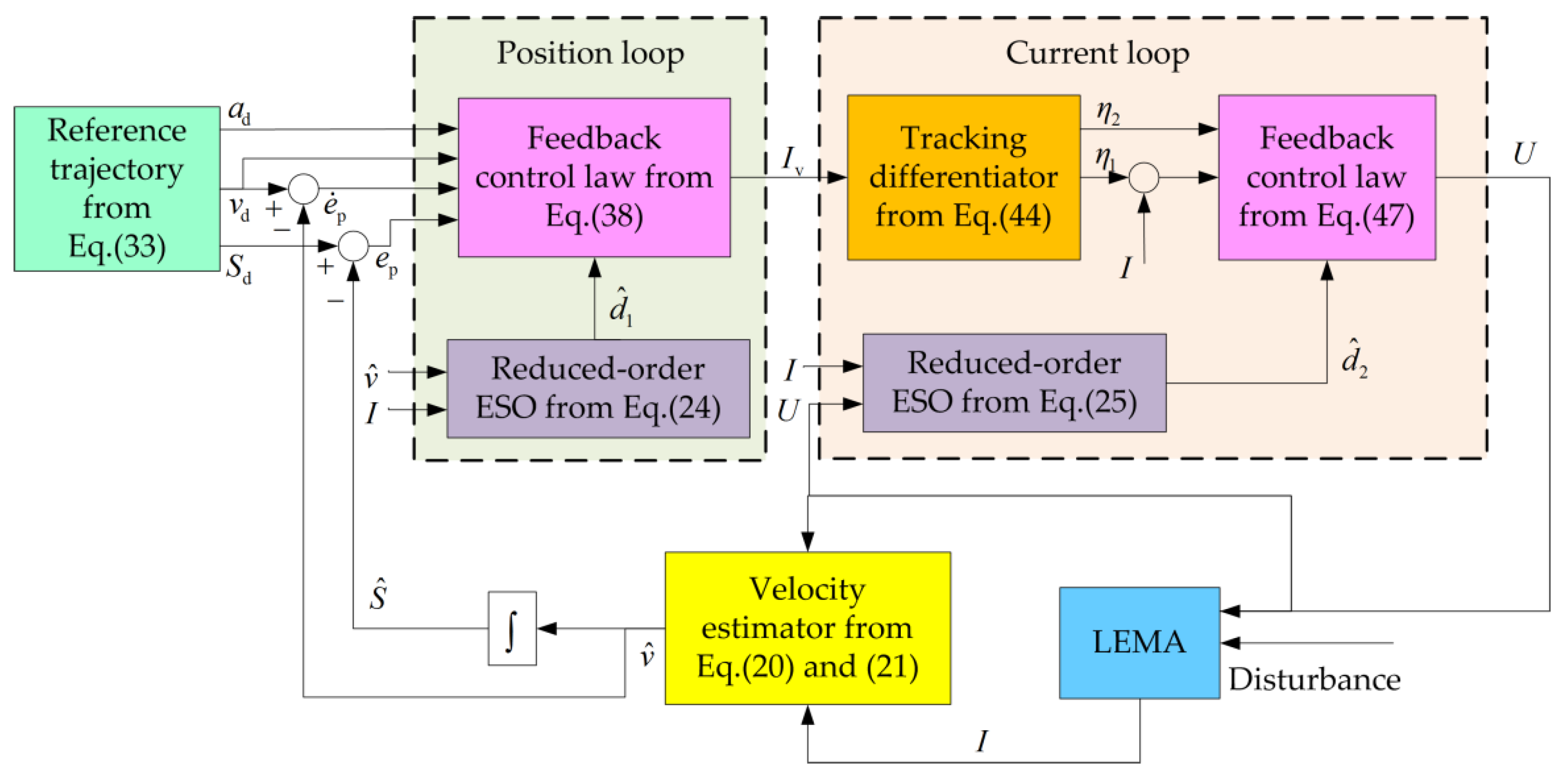
4. Model-Assisted Reduced-Order Extended State Observer (ESO) Based Cascade Controller Design
4.1. Model-Assisted Reduced-Order ESO
4.2. Cascade Feedback Control Law Design
4.2.1. Feedback Control Law for the Position Loop
4.2.2. Feedback Control Law for the Current Loop
5. Simulations and Experimental Results
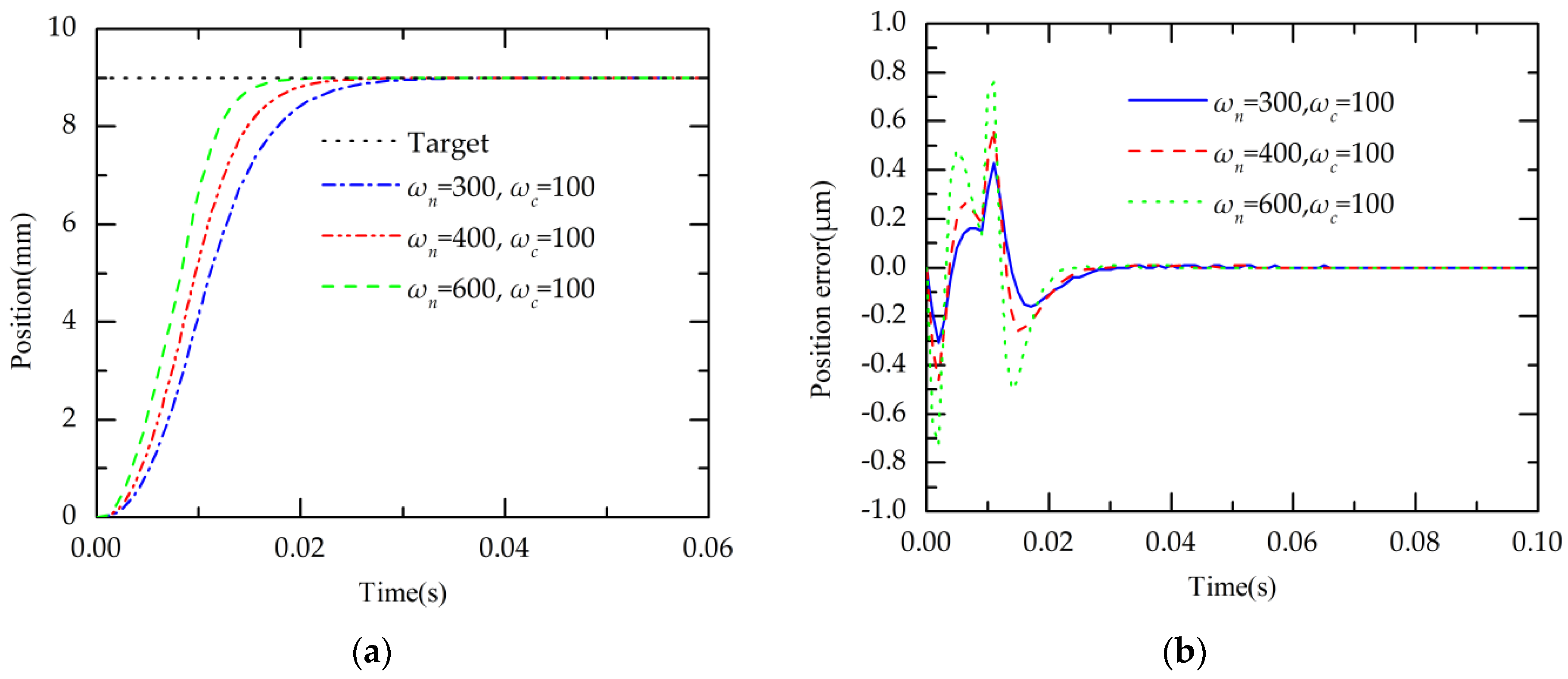
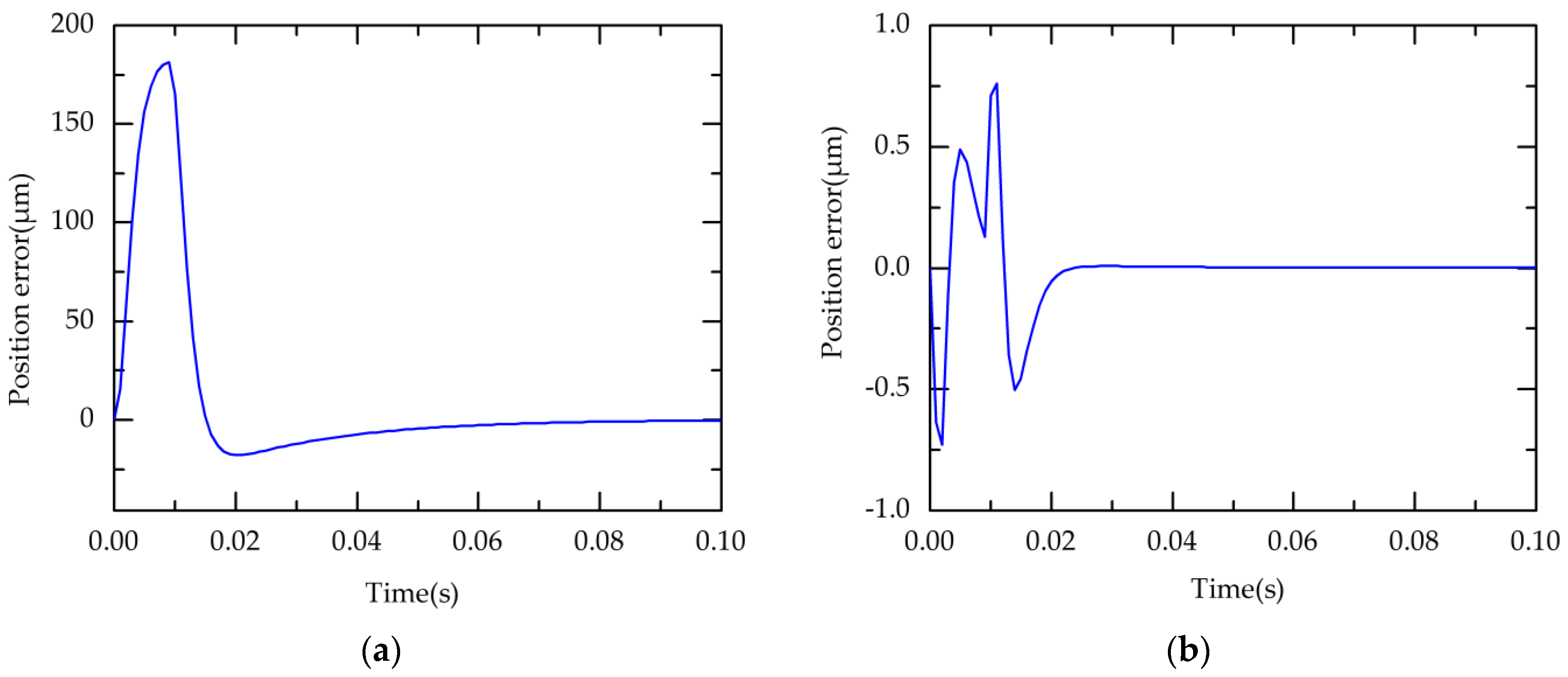
5.1. Comparative Simulations
5.2. Experimental Results
6. Conclusions
- A velocity estimator based on a sensorless control method is designed. With the measurements of input current, velocity is estimated through the electrical subsystem, and the complete system model with mechanical uncertainties is avoided.
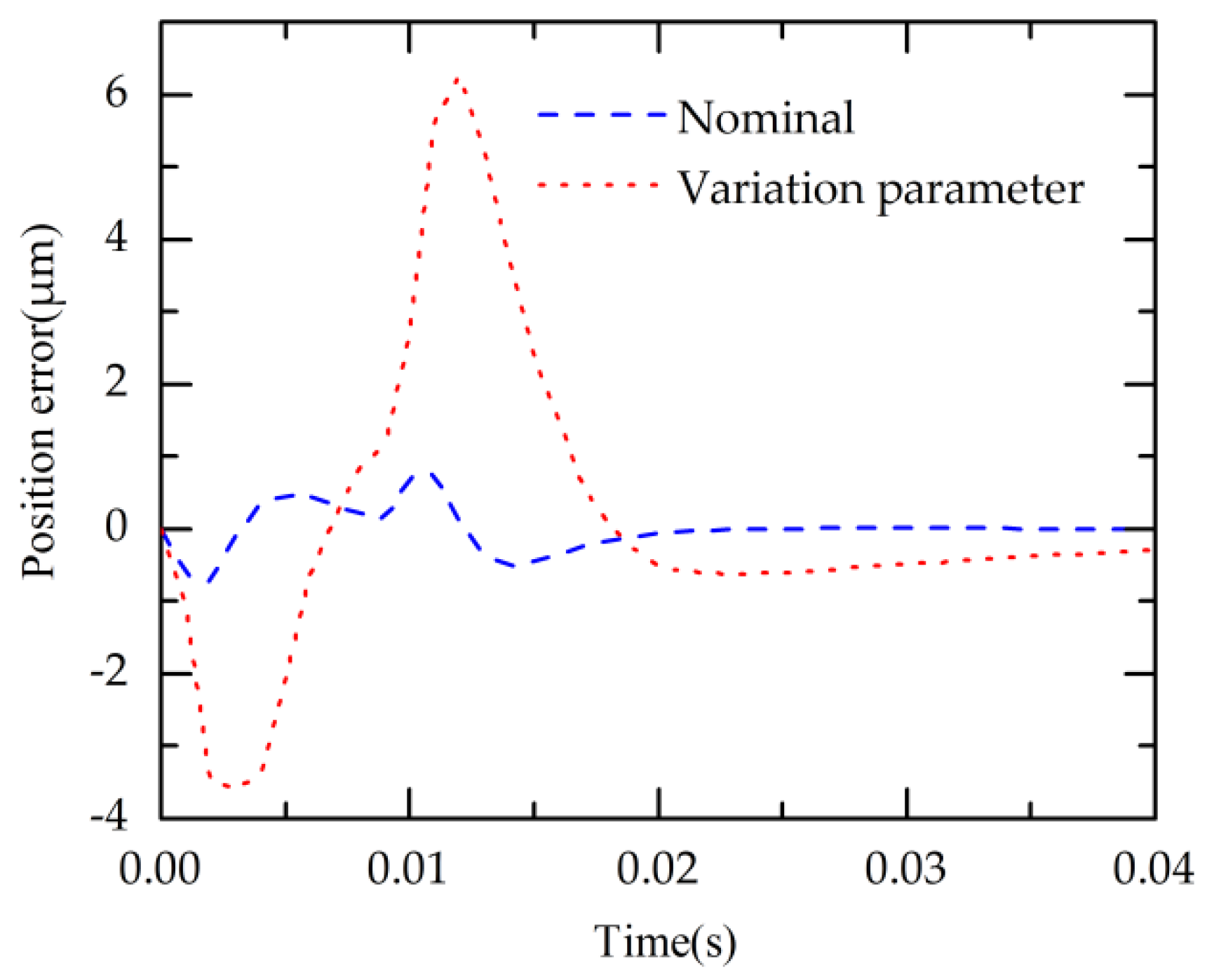
- With partially known model information, the model-assisted reduced-order ESOs are constructed to estimate and compensate for the uncertainties in the velocity and the current loop. The simulation results indicate that the settling time and the margin of position error for the position control can be regulated separately, and the proposed controller is robust to the variations of the parameters and external load forces.
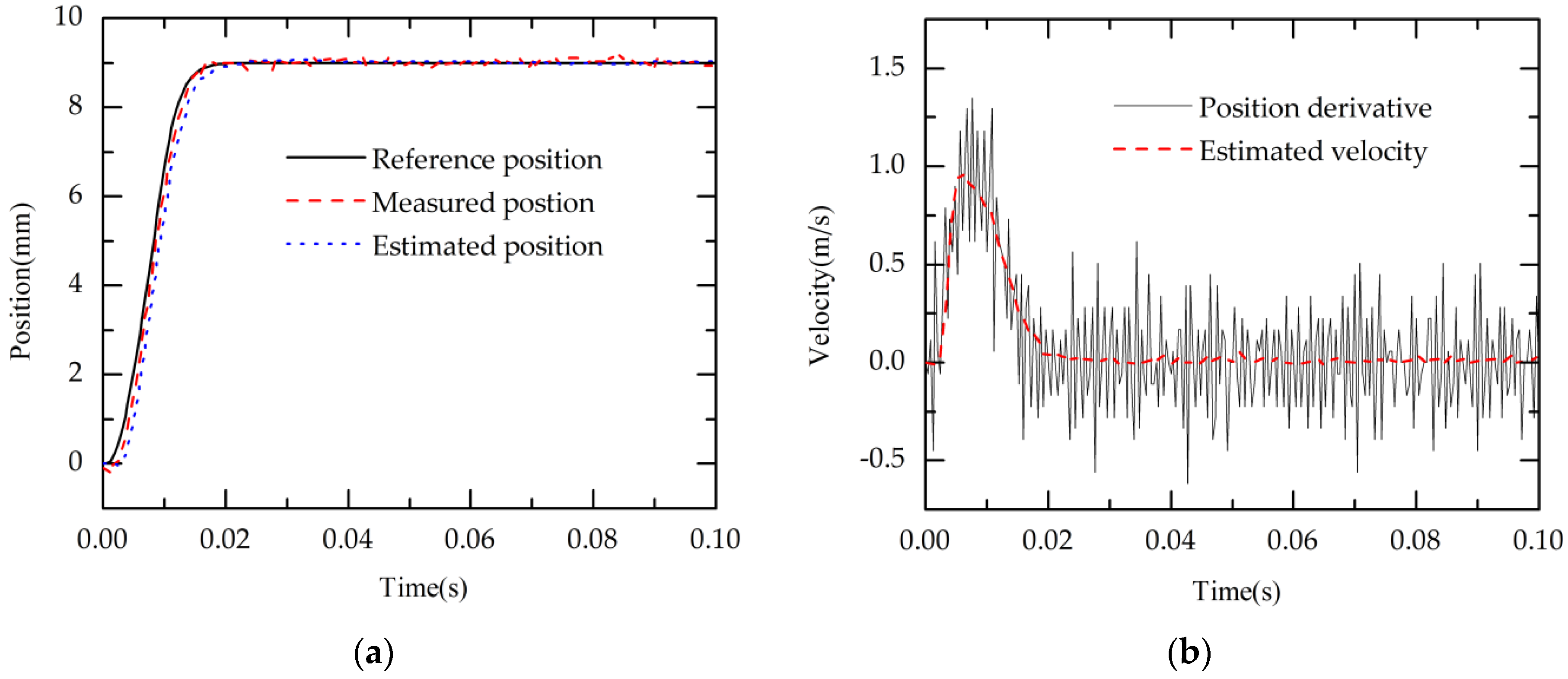
- The bench experimental results show that the proposed controller with the position sensor has better performance, but the controller using a velocity estimator can also complete the gear-change process with acceptable performance. The sensorless control of the independent gear-shifting system is technically feasible. Sensorless control avoids bulky and complicated measurement systems, so it is very promising for real world application. This provides a new approach for the development of the AMT shifting system.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chang, S. Automotive Powertrain, 2nd ed.; China Machine Press: Beijing, China, 2016; ISBN 978-7-111-51625-5. [Google Scholar]
- Glielmo, L.; Iannelli, L.; Vacca, V.; Vasca, F. Gearshift control for automated manual transmission. IEEE/ASME Trans. Mechatron. 2006, 11, 17–26. [Google Scholar] [CrossRef]
- Lu, T.; Dai, F.; Zhang, J.; Wu, M. Optimal control of dry clutch engagement based on the driver’s starting intentions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1048–1057. [Google Scholar] [CrossRef]
- Pettersson, M.; Nielsen, L. Gear shifting by engine control. IEEE Trans. Control Syst. Technol. 2000, 8, 495–507. [Google Scholar] [CrossRef]
- Lucente, G.; Montanari, M.; Rossi, C. Modelling of an automated manual transmission system. Mechatronics 2007, 17, 73–91. [Google Scholar] [CrossRef]
- Balau, A.E.; Caruntu, C.F.; Lazar, C. Simulation and control of an electro-hydraulic actuated clutch. Mech. Syst. Sig. Process 2011, 25, 1911–1922. [Google Scholar] [CrossRef]
- Grancharova, A.; Johansen, T. Design and comparison of explicit model predictive controllers for an electropneumatic clutch actuator using on/off valves. IEEE/ASME Trans. Mechatron. 2011, 16, 665–673. [Google Scholar] [CrossRef]
- Langjord, H.; Johansen, T.A. Dual-mode switched control of an electropneumatic clutch actuator. IEEE/ASME Trans. Mechatron. 2010, 15, 969–981. [Google Scholar] [CrossRef]
- Zhong, Z.; Kong, G.; Yu, Z.; Chen, X.; Chen, X.; Xin, X. Concept evaluation of a novel gear selector for automated manual transmissions. Mech. Syst. Signal Process. 2012, 31, 316–331. [Google Scholar] [CrossRef]
- Taguchi, Y.; Soga, Y.; Mineno, A.; Kuzuya, H.; Horiuchi, I.; Ueda, Y.; Miyazaki, T. Development of an Automated Manual Transmission System Based on Robust Design; SAE Paper 2003-01-0592; SAE International: Warrendale, PA, USA, 2003. [Google Scholar] [CrossRef]
- Chen, Q.M.; Li, L.Y.; Wang, M.Y.; Pei, L. The precise modeling and active disturbance rejection control of voice coil motor in high precision motion control system. Appl. Math. Model. 2015, 39, 5936–5948. [Google Scholar] [CrossRef]
- Turner, A.J.; Ramsay, K.; Clark, R.E.; Howe, D. Development of High Force Electromechanical Linear Actuator for Shift-By-Wire Automated Manual Transmissions; SAE Paper 2006-01-0360; SAE International: Warrendale, PA, USA, 2006. [Google Scholar] [CrossRef]
- Zhou, Y.; Chang, S. The control system design for direct-drive gearshift mechanism. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, Korea, 26–30 September 2016. [Google Scholar]
- Kim, J.; Lee, H. Motor position control algorithm for an automated manual transmission of the agricultural tractor. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 3341–3349. [Google Scholar] [CrossRef]
- Li, L.; He, K.; Wang, X.; Liu, Y. Sensor fault-tolerant control for gear-shifting engaging process of automated manual transmission. Mech. Syst. Signal Process. 2017, 99, 790–804. [Google Scholar] [CrossRef]
- Hanson, B.; Levesley, M. Self-sensing applications for electromagnetic actuators. Sens. Actuators A 2004, 116, 345–351. [Google Scholar] [CrossRef]
- Mercorelli, P. Robust feedback linearization using an adaptive PD regulator for a sensorless control of a throttle valve. Mechatronics 2009, 19, 1334–1345. [Google Scholar] [CrossRef]
- Xu, Q. Digital sliding-mode control of piezoelectric micropositioning system based on input–output model. IEEE Trans. Ind. Electron. 2014, 61, 5517–5526. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, J.; Liu, H.; Li, B.; Kong, W. Second-order sliding-mode observer with online parameter identification for sensorless induction motor drives. IEEE Trans. Ind. Electron. 2014, 61, 5280–5289. [Google Scholar] [CrossRef]
- Vieira, R.P.; Gastaldini, C.C.; Azzolin, R.Z.; Gründling, H.A. Sensorless sliding-mode rotor speed observer of induction machines based on magnetizing current estimation. IEEE Trans. Ind. Electron. 2014, 61, 4573–4582. [Google Scholar] [CrossRef]
- Bernardes, T.; Montagner, V.F.; Gründling, H.A.; Pinheriro, H. Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine. IEEE Trans. Ind. Electron. 2014, 61, 1679–1691. [Google Scholar] [CrossRef]
- Mercorelli, P. An adaptive and optimized switching observer for sensorless control of an electromagnetic valve actuator in camless internal combustion engines. Asian J. Control 2014, 16, 959–973. [Google Scholar] [CrossRef]
- Mercorelli, P. A Motion-Sensorless Control for Intake Valves in Combustion Engines. IEEE Trans. Ind. Electron. 2017, 64, 3402–3412. [Google Scholar] [CrossRef]
- Mercorelli, P. A switching kalman filter for sensorless control of a hybrid hydraulic piezo actuator using mpc for camless internal combustion engines. In Proceedings of the IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012. [Google Scholar]
- Mercorelli, P. A two-stage sliding-mode high-gain observer to reduce uncertainties and disturbances effects for sensorless control in automotive applications. IEEE Trans. Ind. Electron. 2015, 62, 5929–5940. [Google Scholar] [CrossRef]
- Okada, Y.; Matsuda, K.; Hashitani, H. Self-sensing active vibration control using the moving-coil-type actuator. J. Vib. Acoust. 1995, 117, 411–415. [Google Scholar] [CrossRef]
- Bai, M.R.; Wu, H. Robust control of a sensorless bass-enhanced moving-coil loudspeaker system. J. Acoust. Soc. Am. 1999, 105, 3283–3289. [Google Scholar] [CrossRef]
- Zhang, J.; Chang, Y.; Xing, Z. Study on self-sensor of linear moving magnet compressor’s piston stroke. IEEE Sens. J. 2009, 9, 154–158. [Google Scholar] [CrossRef]
- Sung, J.W.; Lee, C.W.; Kim, G.S.; Lipo, T.A.; Won, C.Y.; Choi, S. Sensorless control for linear compressors. Int. J. Appl. Electromagnet. Mech. 2006, 24, 273–286. [Google Scholar]
- Lin, S.; Chang, S.; Li, B. Improving the gearshifts events in automated manual transmission by using an electromagnetic actuator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1548–1561. [Google Scholar] [CrossRef]
- Phu, D.X.; An, J.H.; Choi, S.B. A Novel Adaptive PID Controller with Application to Vibration Control of a Semi-Active Vehicle Seat Suspension. Appl. Sci. 2017, 7, 1055. [Google Scholar] [CrossRef]
- Song, B.K.; An, J.H.; Choi, S.B. A New Fuzzy Sliding Mode Controller with a Disturbance Estimator for Robust Vibration Control of a Semi-Active Vehicle Suspension System. Appl. Sci. 2017, 7, 1053. [Google Scholar] [CrossRef]
- Chen, W.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Chladny, R.R.; Koch, C.R. Flatness-based tracking of an electromechanical variable valve timing actuator with disturbance observer feedforward compensation. IEEE Trans. Control Syst. Technol. 2008, 16, 652–663. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique; National Defense Industry Press: Beijing, China, 2008; ISBN 978-7-118-05795-9. [Google Scholar]
- Shi, X.; Chang, S. Precision motion control of a novel electromagnetic linear actuator based on a modified active disturbance rejection controller. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 226, 606–614. [Google Scholar] [CrossRef]
- Lin, S.; Chang, S.; Li, B. Gearshift control system development for direct-drive automated manual transmission based on a novel electromagnetic actuator. Mechatronics 2014, 24, 1214–1222. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W. Active disturbance rejection control: Methodology and theoretical analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef] [PubMed]
- Chang, S.; Liu, L. A Moving Coil Permanent Magnet Linear Actuator with High Power Density. Patent CN101127474B, 14 July 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Moving mass | m | 0.15 | kg |
| Active stroke | - | 18 | mm |
| Resistance | R | 0.68 | Ω |
| Inductance | L | 0.89 | mH |
| Actuator coefficient | 15.8 | N/A |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Chang, S. A Model-Assisted Reduced-Order ESO Based Cascade Controller for Sensorless Control of Independent Gear-Shifting Actuators. Appl. Sci. 2017, 7, 1283. https://doi.org/10.3390/app7121283
Zhou Y, Chang S. A Model-Assisted Reduced-Order ESO Based Cascade Controller for Sensorless Control of Independent Gear-Shifting Actuators. Applied Sciences. 2017; 7(12):1283. https://doi.org/10.3390/app7121283
Chicago/Turabian StyleZhou, Yingchao, and Siqin Chang. 2017. "A Model-Assisted Reduced-Order ESO Based Cascade Controller for Sensorless Control of Independent Gear-Shifting Actuators" Applied Sciences 7, no. 12: 1283. https://doi.org/10.3390/app7121283
APA StyleZhou, Y., & Chang, S. (2017). A Model-Assisted Reduced-Order ESO Based Cascade Controller for Sensorless Control of Independent Gear-Shifting Actuators. Applied Sciences, 7(12), 1283. https://doi.org/10.3390/app7121283