Experimental Investigation of a Base Isolation System Incorporating MR Dampers with the High-Order Single Step Control Algorithm


 ,
, 
 and
and 
Abstract
:1. Introduction
2. Magnetorheological Smart Isolation System
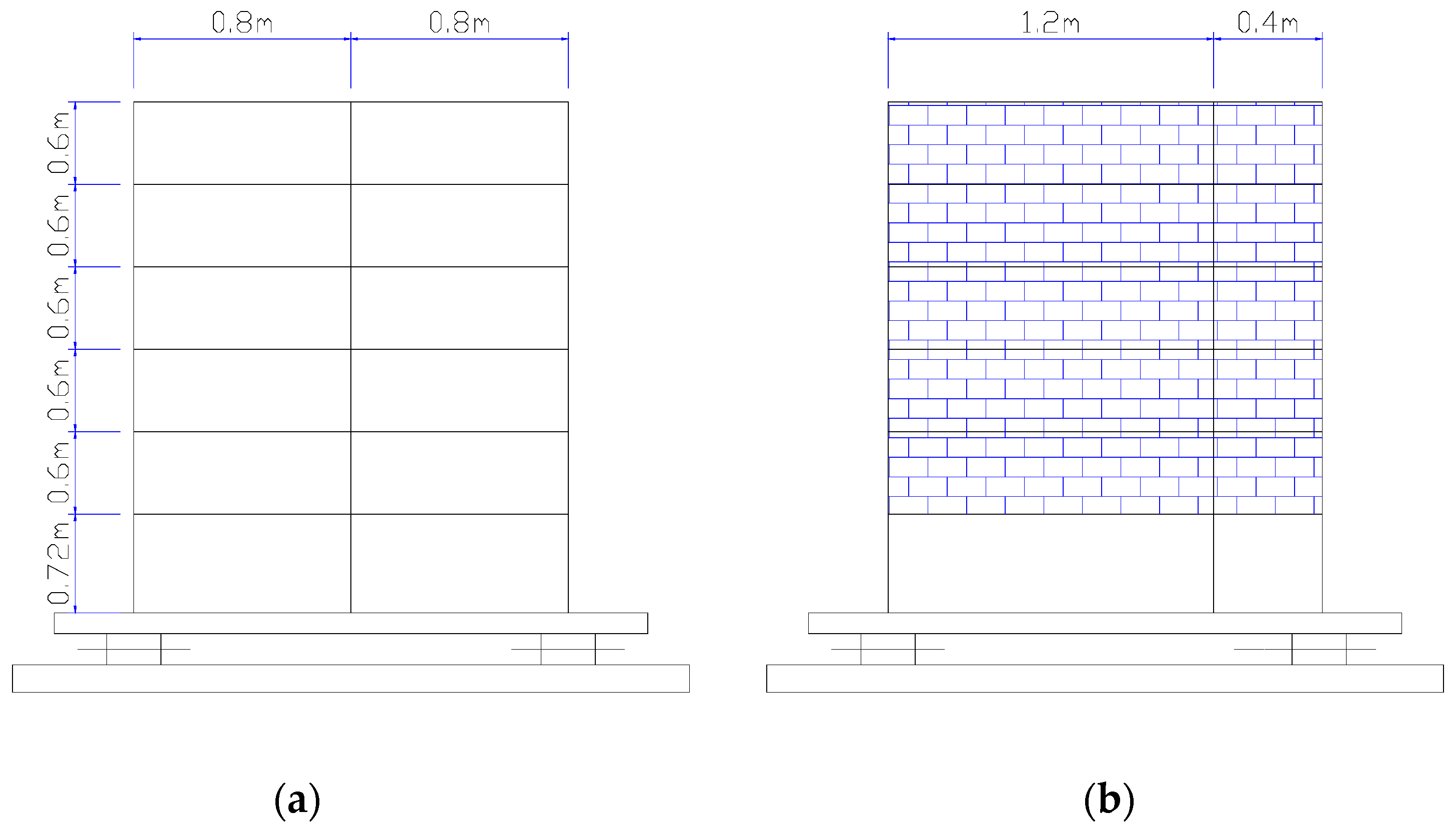
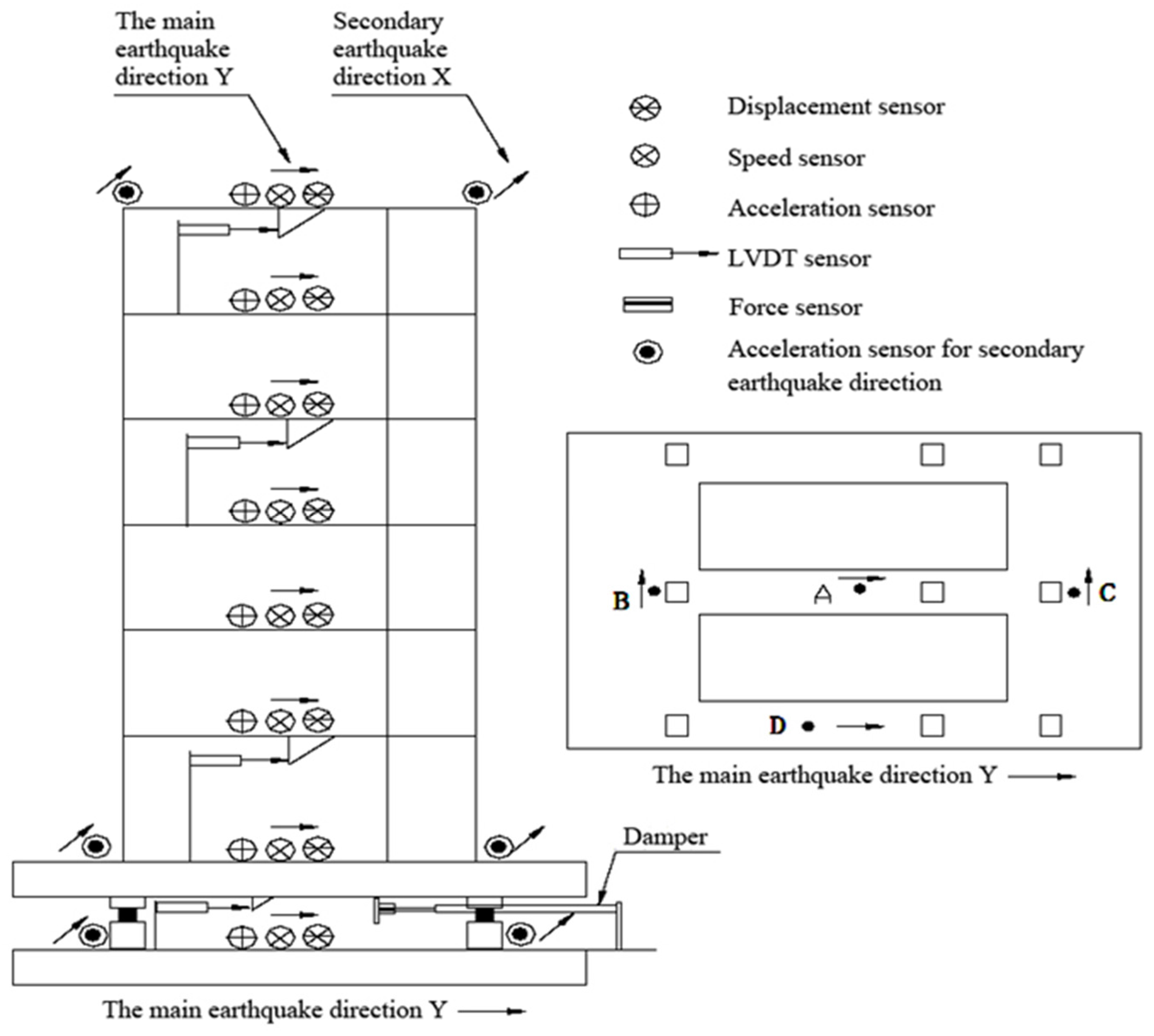
2.1. Test Model
2.2. Control Algorithm and Strategy
2.3. Isolation Bearing
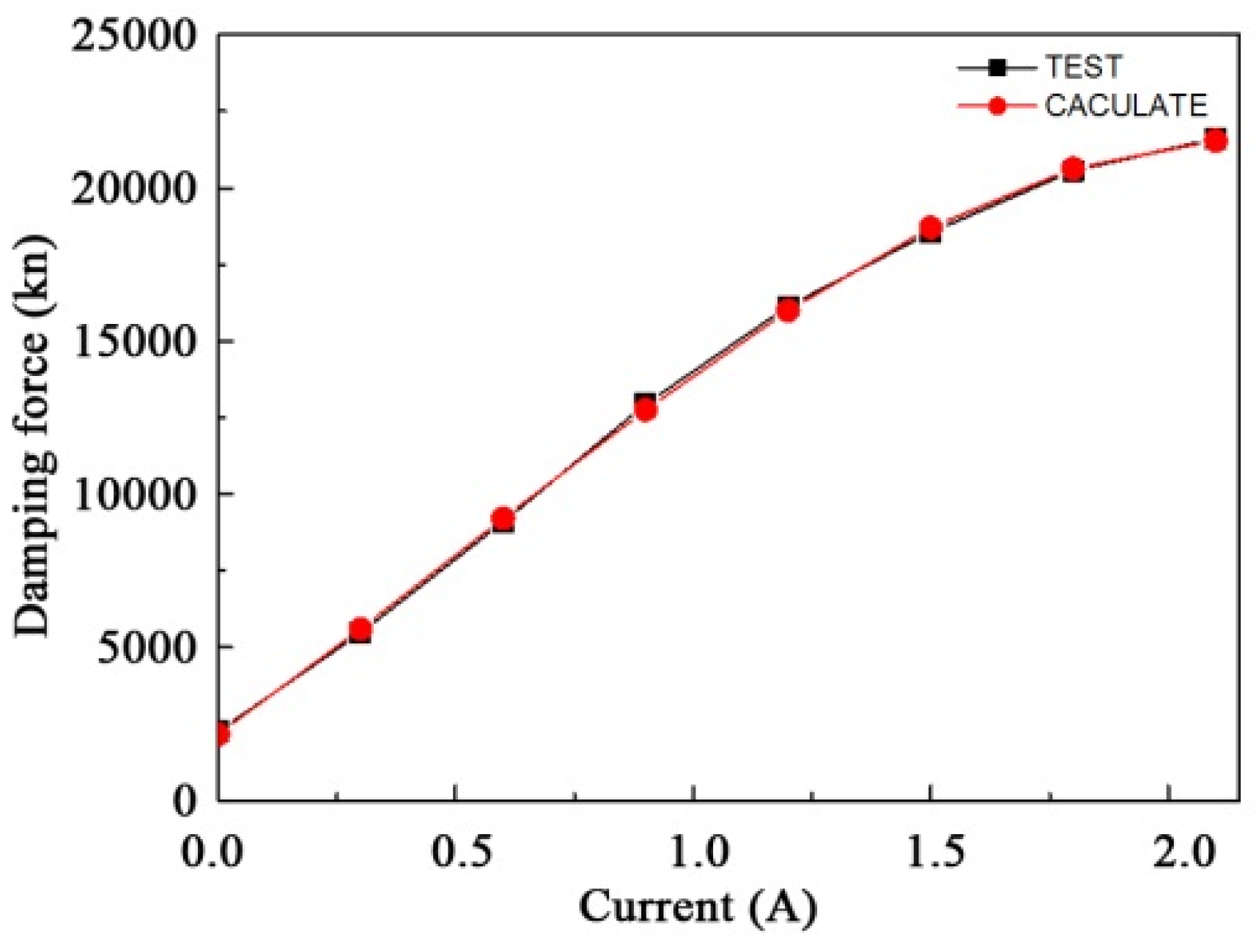
2.4. MR Damper
3. Test Scheme
3.1. Loading Pattern
3.2. Measurement Scheme
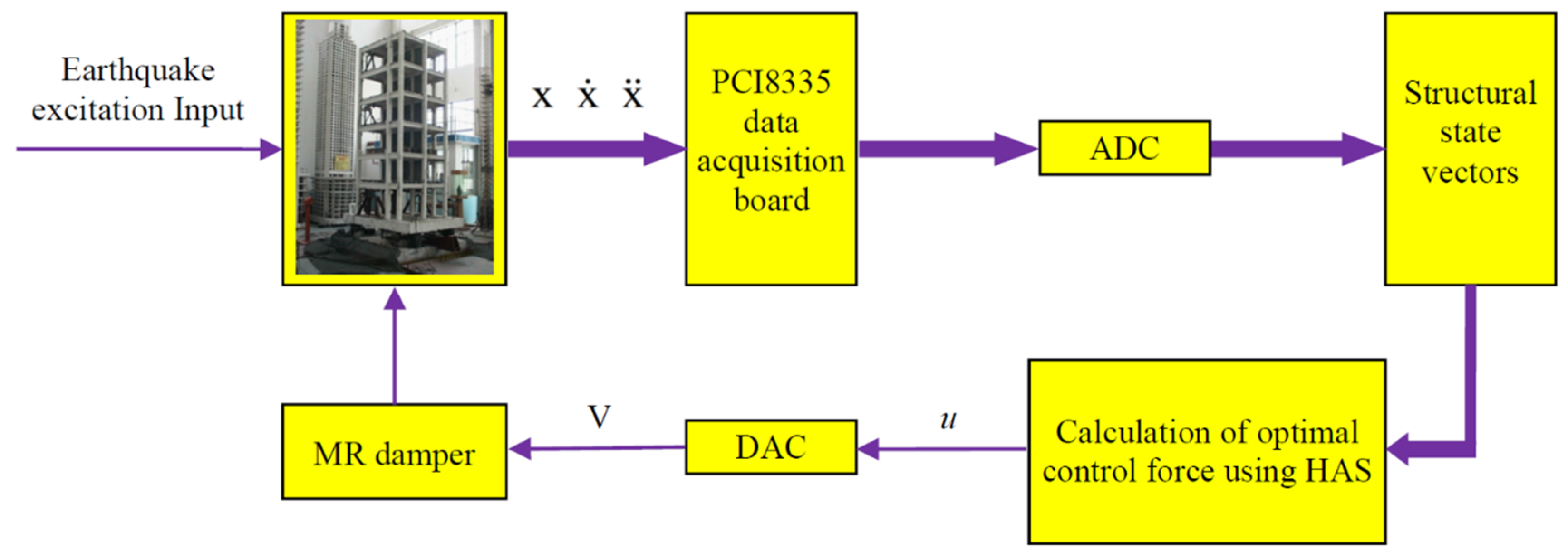
3.3. Feedback Control System Scheme
4. Analysis of Experimental Results
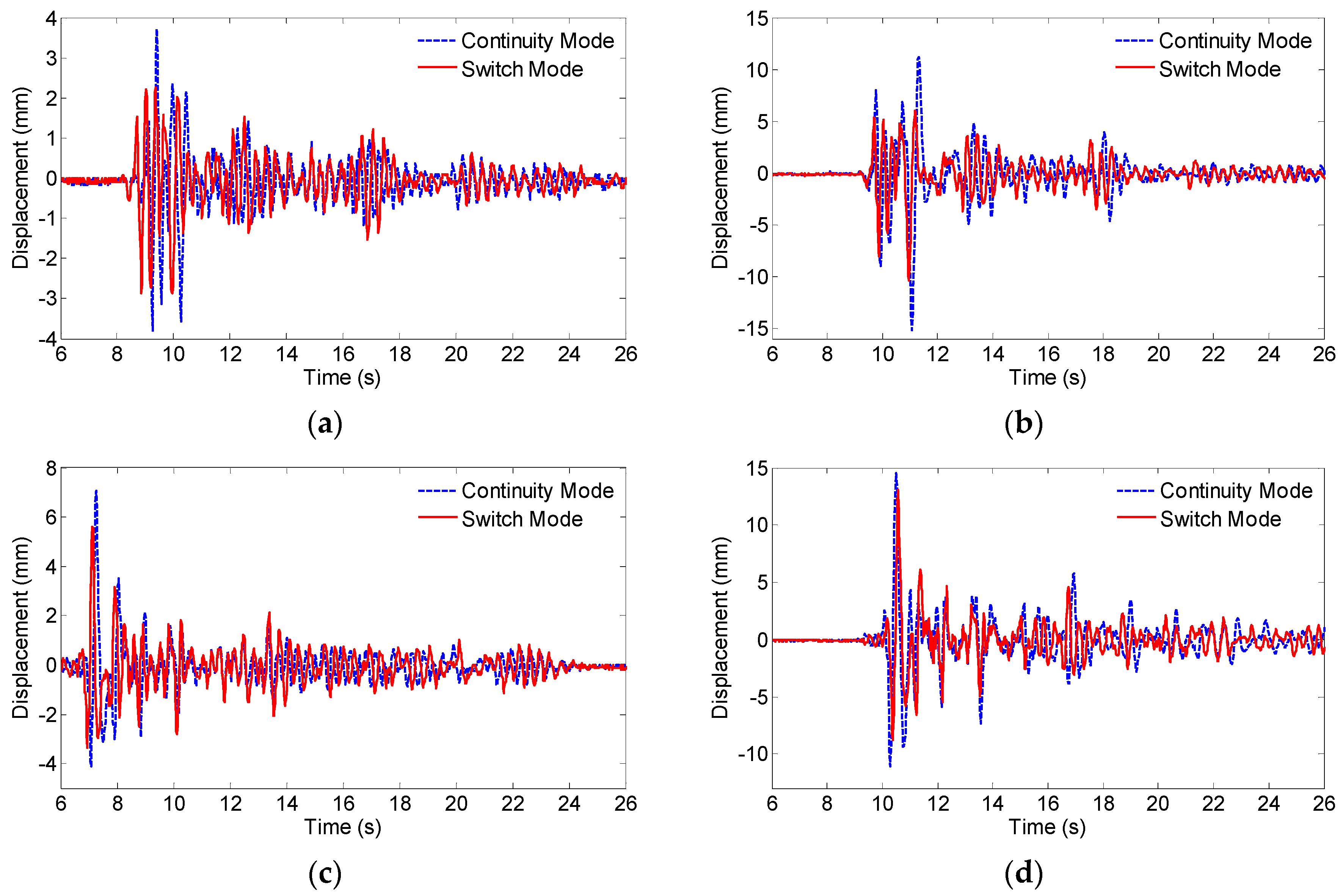
4.1. Structural Displacement Response
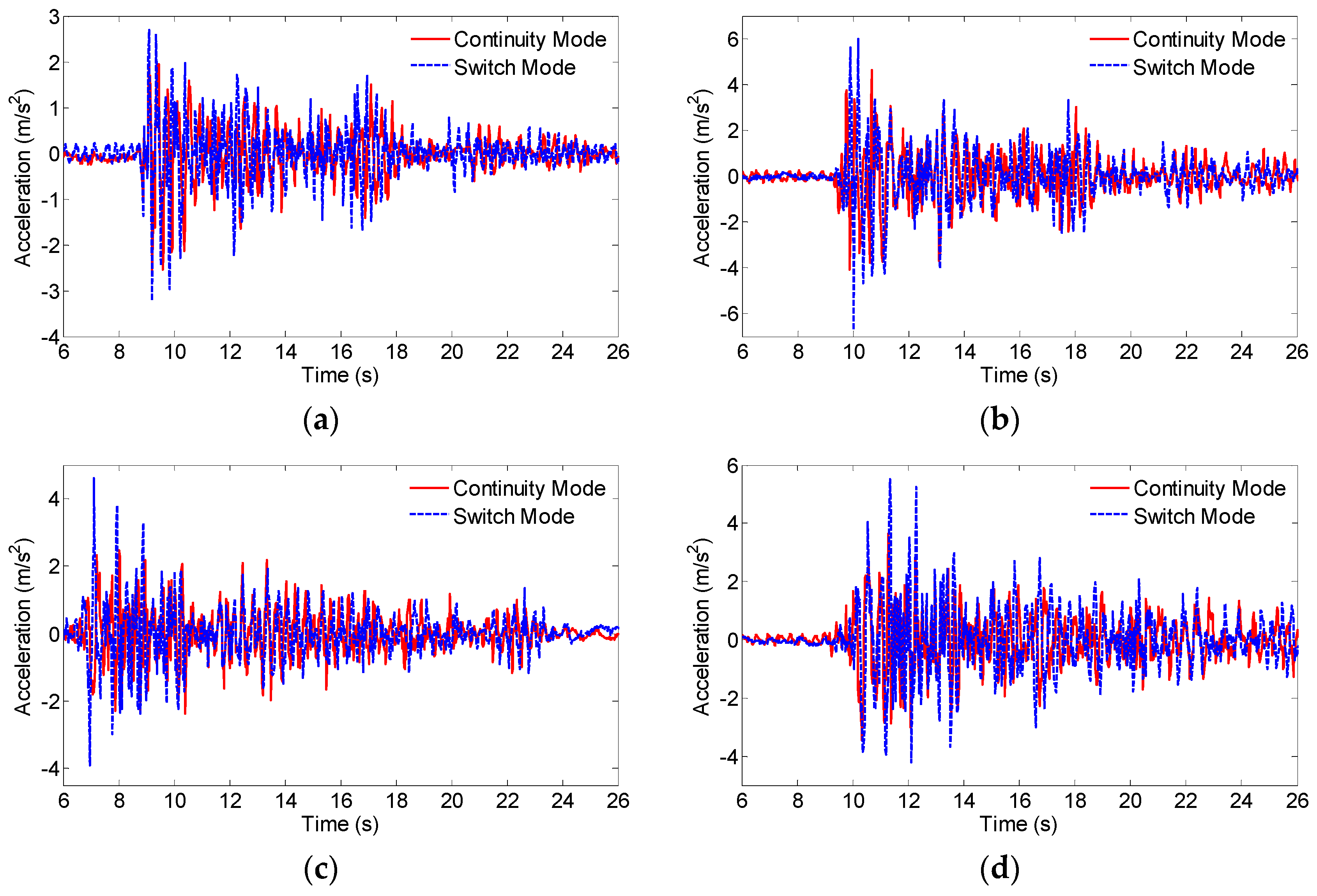
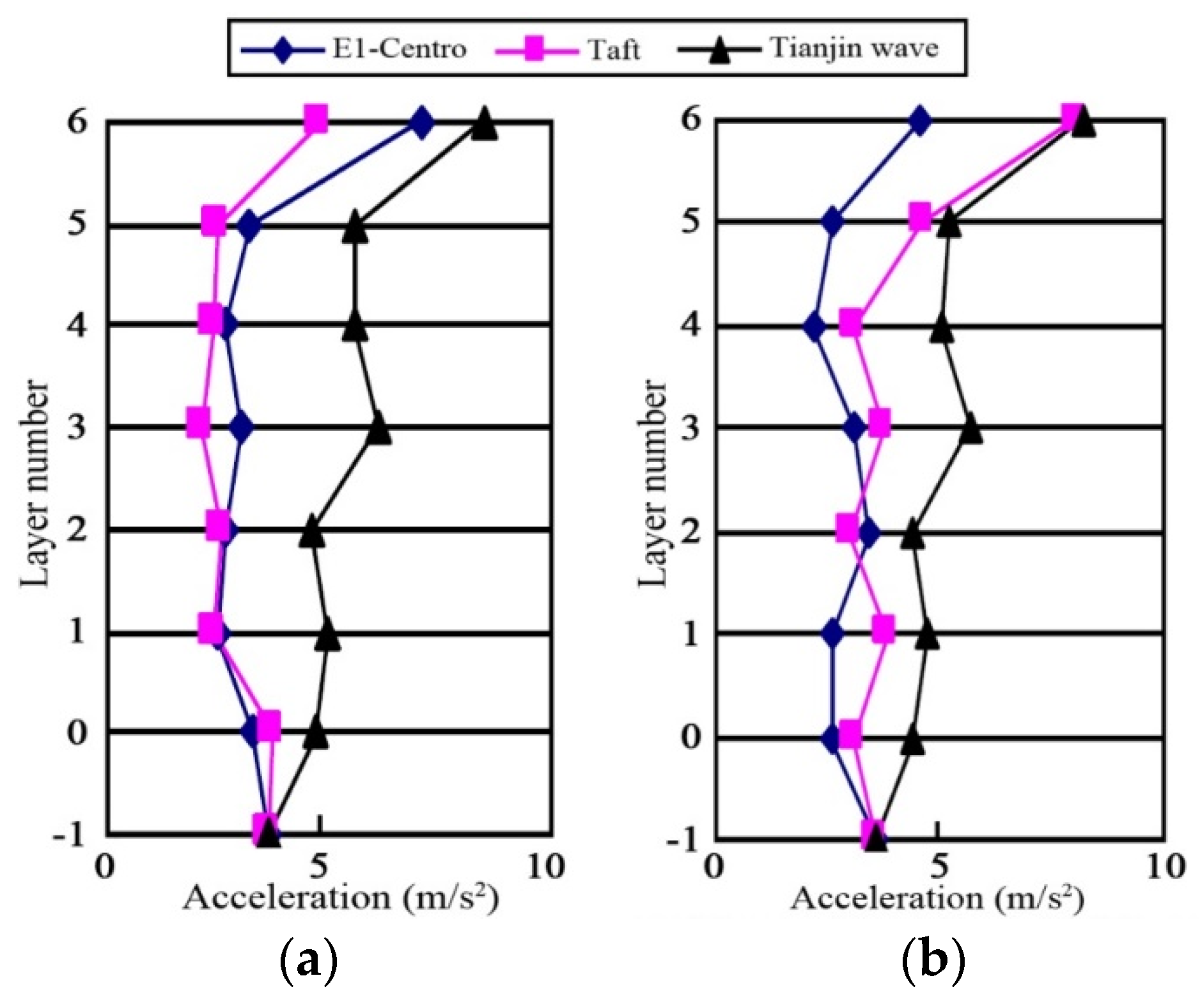
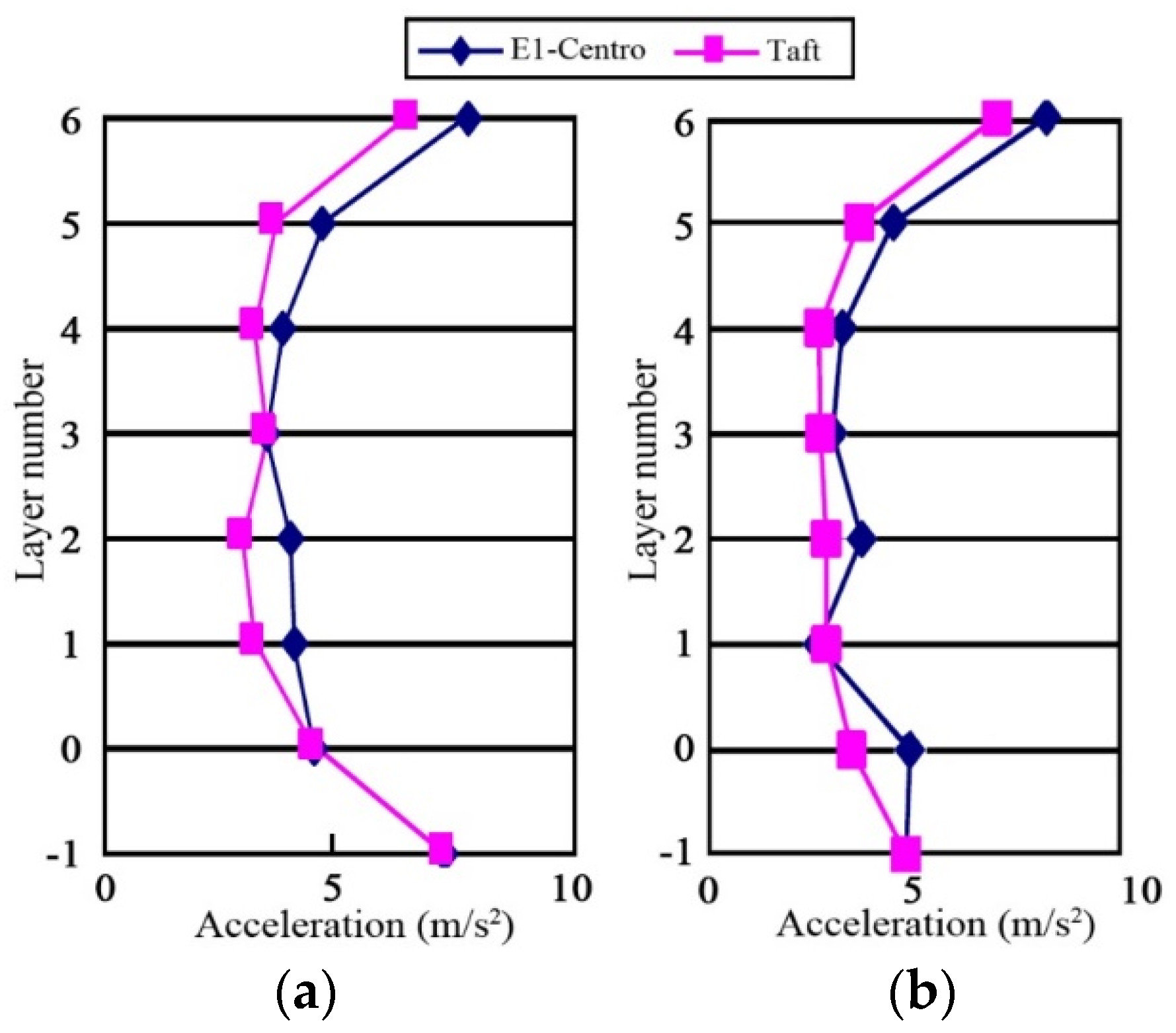
4.2. Structural Acceleration Response
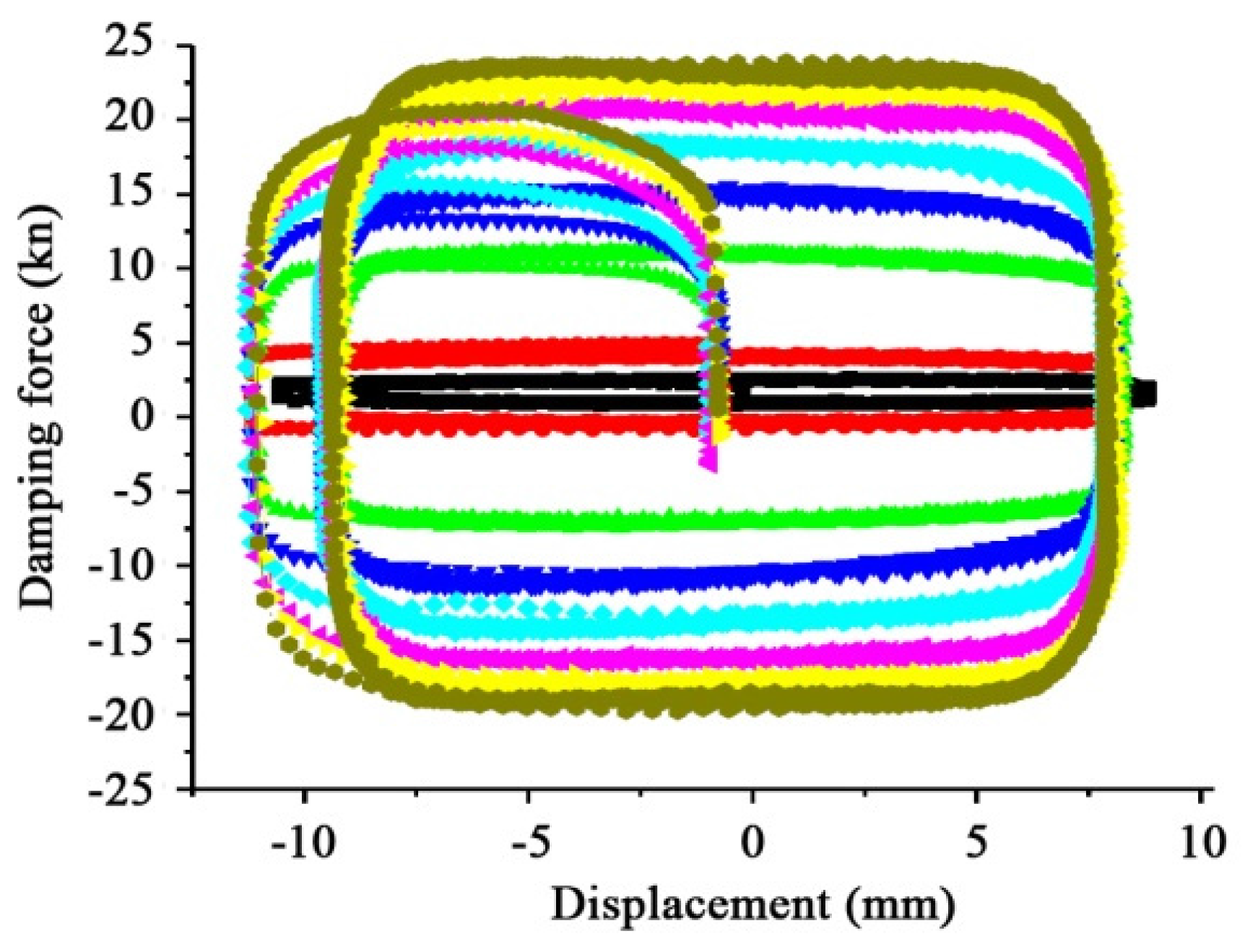
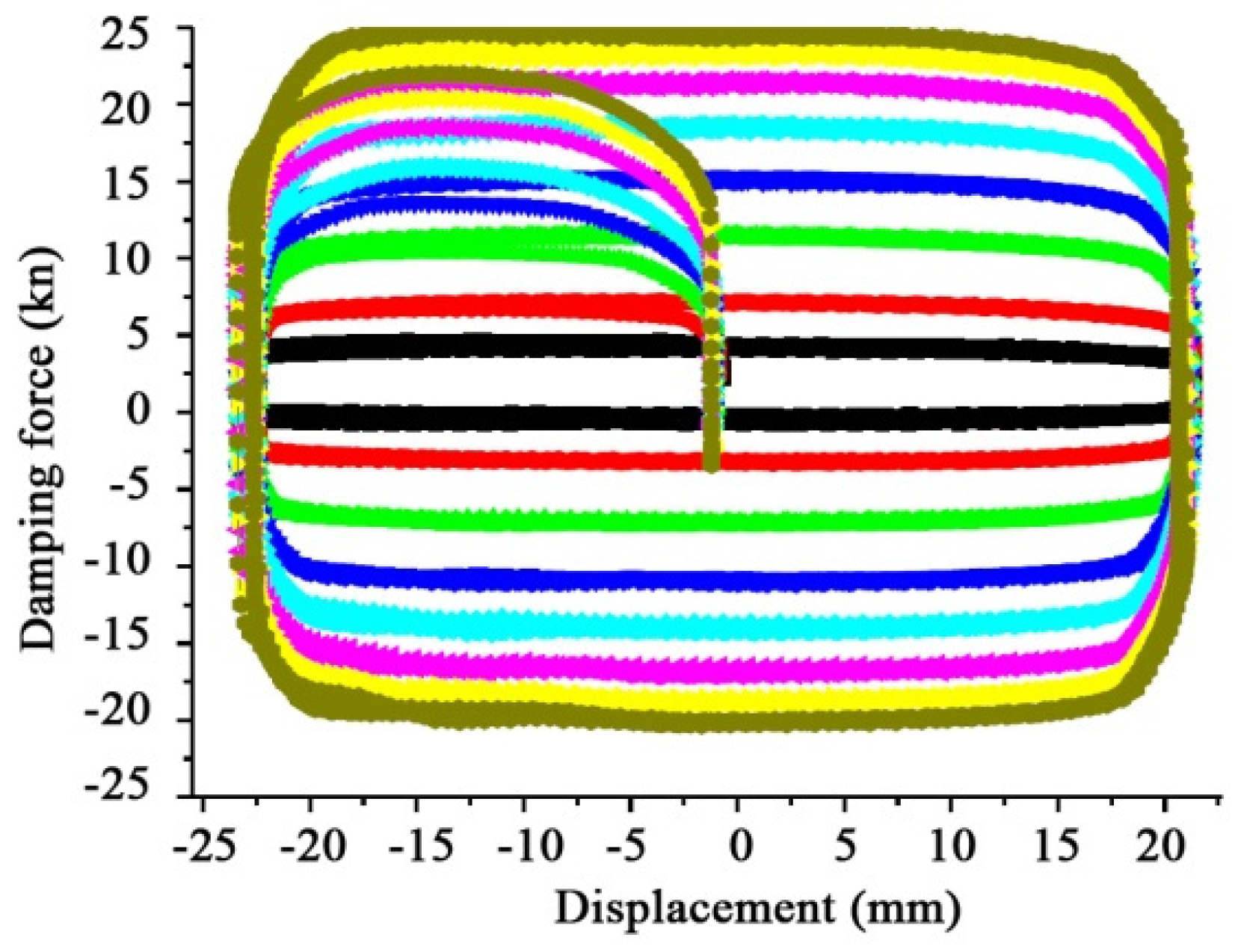
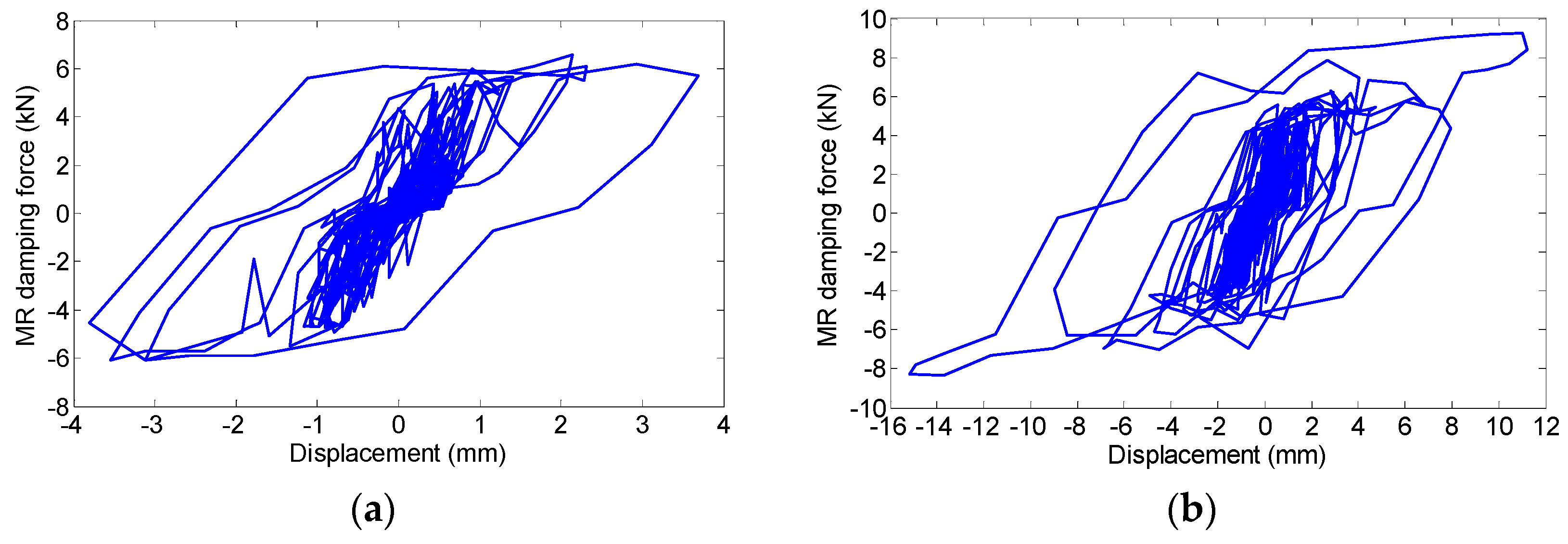
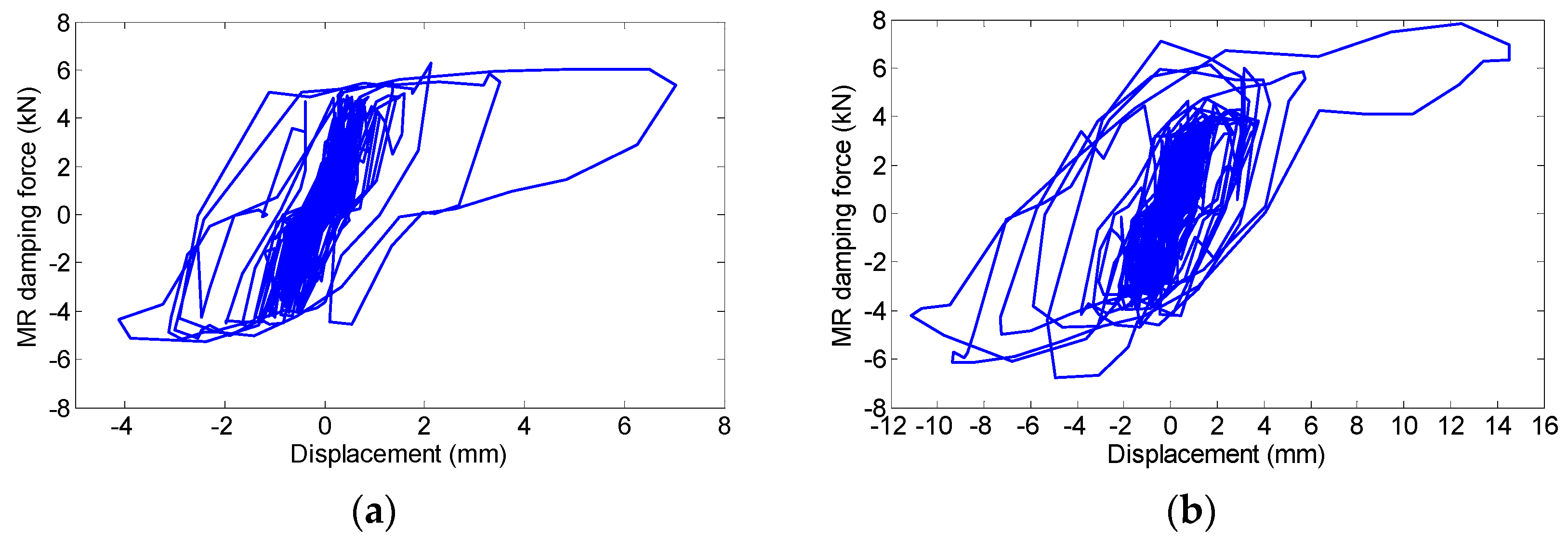
4.3. MR Damper Response
4.4. Comparative Analysis of MR Isolation and LRB Isolation
5. Conclusions
- (1)
- The proposed isolation system can be applied to different site categories. The deformation corresponding to isolation layer can be effectively limited. Simultaneously, acceleration response of the superstructure can be reduced. Therefore, the smart isolation control system is shown to exhibit better control performance as compared with the traditional passive control method.
- (2)
- Energy dissipation paths can be adapted by MR dampers in accordance with varying earthquake input excitations, and variable damping can be provided for the isolation layer. From the acceleration reductions and the hysteresis curves, the seismic energy can be found to be effectively dissipated. Therefore, the design objective concerning the mitigation of secondary damages can also be fulfilled.
- (3)
- Restoring force can be provided by the rubber bearings to the isolation layer, thus the requirement of deformation limit of the isolation layer can be achieved under rare earthquakes.
- (4)
- The high-order single-step algorithm has the capability of real-time calculation of structural response. Therefore, time delay issues can be effectively addressed. The entire control process, including data acquisition, real-time calculation and the results updating can be achieved by the control system. The control effect is not affected by changes associated with external input.
- (5)
- The switch control strategy is found to be simple and reliable. The displacement response of isolation layer can be effectively controlled. Moreover, continuous regulated damping force can be achieved through a continuity control strategy. It is appropriate to consider the characteristics of MR dampers when instantaneous variable damping is needed.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kelly, J.M.; Leitmann, G.; Soldatos, A.G. Robust control of base-isolated structures under earthquake excitation. J. Optim. Theory Appl. 1987, 53, 159–180. [Google Scholar] [CrossRef]
- Jung, H.J.; Jang, D.D.; Lee, H.J.; Lee, I.W.; Cho, S.W. Feasibility test of adaptive passive control system using MR fluid damper with electromagnetic induction part. J. Eng. Mech. 2000, 136, 254–259. [Google Scholar] [CrossRef]
- Tsai, H.C.; Kelly, J.M. Seismic response of the superstructure and attached equipment in a base-isolated building. Earthq. Eng. Struct. Dyn. 1989, 18, 551–564. [Google Scholar] [CrossRef]
- Inaudi, J.A.; Kelly, J.M. Hybrid isolation systems for equipment protection. Earthq. Eng. Struct. Dyn. 1993, 22, 297–313. [Google Scholar] [CrossRef]
- Wu, M.; Samali, B. Shake table testing of a base isolated model. Eng. Struct. 2002, 24, 1203–1215. [Google Scholar] [CrossRef]
- Castaldo, P.; Palazzo, B.; Della, V.P. Seismic reliability of base-isolated structures with friction pendulum bearings. Eng. Struct. 2015, 95, 80–93. [Google Scholar] [CrossRef]
- Wang, Y.; McFarland, D.M.; Vakakis, A.F.; Bergman, L.A. Seismic base isolation by nonlinear mode localization. Arch. Appl. Mech. 2005, 74, 387–414. [Google Scholar] [CrossRef]
- Lu, L.Y.; Lin, G.L.; Kuo, T.C. Stiffness controllable isolation for near-fault seismic isolation. Eng. Struct. 2008, 30, 747–765. [Google Scholar] [CrossRef]
- Huang, B.; Zhang, H.; Wang, H.; Song, G. Passive base isolation with superelastic nitinol SMA helical springs. Smart Mater. Struct. 2014, 23, 065009. [Google Scholar] [CrossRef]
- Li, H.N.; Chang, Z.G.; Song, G. Studies on structural vibration control with MR dampers using mGA. Earthq. Eng. Eng. Vib. 2005, 4, 301–304. [Google Scholar] [CrossRef]
- Zhang, C. Control force characteristics of different control strategies for the wind-excited 76-story benchmark building structure. Adv. Struct. Eng. 2014, 17, 543–560. [Google Scholar]
- Zhang, C.; Ou, J. Control structure interaction of electromagnetic mass damper system for structural vibration control. ASCE Eng. Mech. 2008, 134, 428–437. [Google Scholar] [CrossRef]
- Ying, Z.G.; Ni, Y.Q.; Ko, J.M. A semi-active stochastic optimal control strategy for nonlinear structural systems with MR dampers. Smart Struct. Syst. 2009, 5, 69–79. [Google Scholar] [CrossRef]
- Yang, G.; Spencer, B.F.; Carlson, J.D.; Sain, M.K. Largescale MR fluid dampers: Modeling and dynamic performance considerations. Eng. Struct. 2002, 24, 309–323. [Google Scholar] [CrossRef]
- Choi, S.B.; Nam, M.H.; Lee, B.K. Vibration control of a MR seat damper for commercial vehicles. J. Intell. Mater. Syst. Struct. 2000, 11, 936–944. [Google Scholar] [CrossRef]
- Pierrick, J.; Ohayon, R.; Bihan, D. Semi-active control using magneto-rheological dampers for payload launch vibration isolation. In Proceedings of the Smart Structures and Materials 2006: Damping and Isolation SPIE 2006, San Diego, CA, USA, 26 February 2016. [Google Scholar]
- Bhaskararao, A.V.; Jangid, R.S. Seismic analysis of structures connected with friction dampers. Eng. Struct. 2006, 28, 690–703. [Google Scholar] [CrossRef]
- Bharti, S.D.; Dumne, S.M.; Shrimali, M.K. Seismic response analysis of adjacent buildings connected with MR dampers. Eng. Struct. 2010, 32, 2122–2133. [Google Scholar] [CrossRef]
- Calabrese, A.; Spizzuoco, M.; Serino, G.; Della Corte, G.; Maddaloni, G. Shake table investigation of a novel, low cost, base isolation technology using recycled rubber. Struct. Control Health Monit. 2014, 22, 107–122. [Google Scholar] [CrossRef]
- Caterino, N.; Spizzuoco, M.; Occhiuzzi, A. Promptness and dissipative capacity of MR dampers: Experimental investigations. Struct. Control Health Monit. 2013, 20, 1424–1440. [Google Scholar] [CrossRef]
- Maddaloni, G.; Caterino, N.; Occhiuzzi, A. Shake table investigation of a structure isolated by recycled rubber. Struct. Control Health Monit. 2016. [Google Scholar] [CrossRef]
- Lin, P.Y.; Roschke, P.N.; Loh, C.H. Hybrid base isolation with magnetorheological damper and fuzzy control. Struct. Control Health Monit. 2007, 14, 384–405. [Google Scholar] [CrossRef]
- Yoshioka, H.; Ramallo, J.C.; Spencer, B.F. “Smart” Base isolation strategies employing magnetorheological dampers. J. Eng. Mech. 2002, 128, 540–551. [Google Scholar] [CrossRef]
- Matsagar, V.A.; Jangid, R.S. Viscoelastic damper connected to adjacent structures involving seismic isolation. J. Civ. Eng. Manag. 2005, 11, 309–322. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Wang, W. The high order single step method for seismic response analysis of non-linear structures. Earthq. Eng. Eng. Vib. 1996, 16, 48–54. [Google Scholar]
- Wang, H.D.; Zhang, Y.S.; Wang, W. A high order single step-β method for nonlinear structural dynamic analysis. J. Harbin Inst. Technol. 2003, 10, 113–119. [Google Scholar]
- Zhang, C.; Ou, J. Evaluation Indices and Numerical Analysis on Characteristic of Active Control Force in Structural Active Mass Driver Control System. Pac. Sci. Rev. 2007, 9, 115–122. [Google Scholar]
- Zhang, C.; Ou, J.; Zhang, J. Parameter Optimization and Analysis of Vehicle Suspension System Controlled by Magnetorheological Fluid Dampers. Struct. Control Health Monit. 2006, 13, 885–896. [Google Scholar] [CrossRef]
- Zhang, C.; Ou, J. Improved semi-active control algorithm and simulation analysis for vibration reduction of structures using MR dampers. World Inf. Earthq. Eng. 2003, 19, 37–43. [Google Scholar]
- Code of China. Chinese Code for Seismic Design of Buildings; GB 50011-2010; Code of China: Beijing, China, 2010. [Google Scholar]
- Zhang, C.; Ou, J. Modeling and dynamical performance of the electromagnetic mass driver system for structural vibration control. Eng. Struct. 2015, 82, 93–103. [Google Scholar] [CrossRef]
- Wang, T. Research on the Overturn Effect of Rubber Isolation Structure. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2004. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Quantity | Symbol | Dimension | Similar Coefficient |
|---|---|---|---|
| length | Sl | L | 1/5 |
| elastic modulus | SE | ML−1T−2 | 1 |
| stiffness | Sk | MT−2 | 1/5 |
| acceleration | Sa | L/T2 | 1 |
| time | ST | T | |
| velocity | Sv | L/T | |
| displacement | Sx | L | 1/5 |
| mass | Sm | M | 1/25 |
| Total Height | 87.5 mm | Thickness of Protective Layer | 5 mm |
|---|---|---|---|
| External diameter | 110 mm | Middle hole diameter | 18 mm |
| Height (excluding connection plate) | 63.5 mm | Rubber layer thickness | 1.5 mm |
| Effective diameter, D | 100 mm | No. of rubber layer | 15 |
| Design bearing capacity | 75 kN | Total rubber thickness, Tr | 22.5 mm |
| Standard displacement (dmax) | 55 mm | Thick laminated sheet | 1.5 mm |
| maximum displacement | 23 mm | Thickness of connecting plate | 12 mm |
| Layers of laminated sheet | 14 | Sealing plate thickness | 10 mm |
| Design surface pressure | 10 MPa | - | - |
| Group | Duration (s) | Record Interval (s) | Peak Acceleration (gal) | Earthquake Occurrence Time (s) | Seismic Wave Description | |
|---|---|---|---|---|---|---|
| El-Centro wave | X direction | 53 | 0.02 | 341.695 (NS) | 2.12 | The seismic wave is recorded in El Centro city, California, USA. |
| Y direction | 210.142 (EW) | 11.44 | ||||
| Z direction | −206.34 (UD) | 0.98 | ||||
| Taft wave | X direction | 54 | 0.02 | 175.9 (NS) | 9.3 | The seismic wave is recorded in Kern County, California, USA. |
| Y direction | 152.7 (EW) | 9.1 | ||||
| Z direction | 102.9 (UD) | 9.76 | ||||
| Tianjing wave | X direction | 19 | 0.01 | 145.805 (NS) | 7.65 | The seismic wave is recorded in Tianjin city, PRC. |
| Y direction | 104.18 (EW) | 7.59 | ||||
| Z direction | 73.14 (UD) | 9.03 | ||||
| Earthquake Magnitude | Fortification Intensity | Rare Intensity | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Earthquake Wave | El Centro Wave | Taft Wave | Tianjin Wave | El Centro Wave | Taft Wave | ||||
| Control Strategy | CM | SM | CM | SM | CM | CM | SM | CM | SM |
| Isolation Layer | 3.80 (3.6) | 2.87 (2.93) | 7.04 (8.52) | 5.61 (9.3) | 30.52 (25.1) | 15.18 (15.2) | 10.4 (11.7) | 14.5 (18.5) | 13.0 (15.3) |
| 1st storey | 2.14 | 1.75 | 2.23 | 3.5 | 4.59 | 3.53 | 3.83 | 3.31 | 4.21 |
| 2nd storey | 1.38 | 1.22 | 1.03 | 1.74 | 3.91 | 2.76 | 2.53 | 1.57 | 2.18 |
| 3rd storey | 1.18 | 1.09 | 1.20 | 1.62 | 3.63 | 2.16 | 2.45 | 1.90 | 2.39 |
| 4th storey | 1.01 | 0.90 | 1.10 | 1.45 | 2.37 | 1.48 | 1.95 | 1.54 | 2.03 |
| 5th storey | 0.86 | 0.75 | 0.87 | 1.41 | 1.49 | 1.88 | 1.95 | 1.47 | 1.87 |
| 6th storey | 0.72 | 0.84 | 0.55 | 0.84 | 1.46 | 1.00 | 1.42 | 0.89 | 1.35 |
| El-Centro Wave | Taft Wave | ||
|---|---|---|---|
| The Earthquake Wave | Fortification Intensity | Rare Intensity | Fortification Intensity |
| Table acceleration peak | −0.351 | 0.727 | −0.368 |
| Acceleration peak value of the first layer | −0.281 | −0.596 | −0.503 |
| Acceleration peak value for fifth layer | −0.440 | −0.662 | −0.662 |
| Acceleration amplification factor for structure fifth layers(LRB) | 1.254 | 0.91 | 1.79 |
| Acceleration amplification factor for structure fifth layers(MR) | 0.89 | 0.64 | 0.69 |
| Isolation layer displacement(LRB) | 8.38 | 24.15 | 14.36 |
| Isolation layer displacement(MR) | 3.80 | 15.18 | 7.04 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Zhang, C.; Sun, L.; Askari, M.; Samali, B.; Chung, K.L.; Sharafi, P. Experimental Investigation of a Base Isolation System Incorporating MR Dampers with the High-Order Single Step Control Algorithm. Appl. Sci. 2017, 7, 344. https://doi.org/10.3390/app7040344
Fu W, Zhang C, Sun L, Askari M, Samali B, Chung KL, Sharafi P. Experimental Investigation of a Base Isolation System Incorporating MR Dampers with the High-Order Single Step Control Algorithm. Applied Sciences. 2017; 7(4):344. https://doi.org/10.3390/app7040344
Chicago/Turabian StyleFu, Weiqing, Chunwei Zhang, Li Sun, Mohsen Askari, Bijan Samali, Kwok L. Chung, and Pezhman Sharafi. 2017. "Experimental Investigation of a Base Isolation System Incorporating MR Dampers with the High-Order Single Step Control Algorithm" Applied Sciences 7, no. 4: 344. https://doi.org/10.3390/app7040344
APA StyleFu, W., Zhang, C., Sun, L., Askari, M., Samali, B., Chung, K. L., & Sharafi, P. (2017). Experimental Investigation of a Base Isolation System Incorporating MR Dampers with the High-Order Single Step Control Algorithm. Applied Sciences, 7(4), 344. https://doi.org/10.3390/app7040344