
A New Robust Tracking Control Design for Turbofan Engines: H∞/Leitmann Approach



Abstract
:
1. Introduction
2. Problem Statement
3. Controller Design
3.1. Robust Control Design for the Nominal System
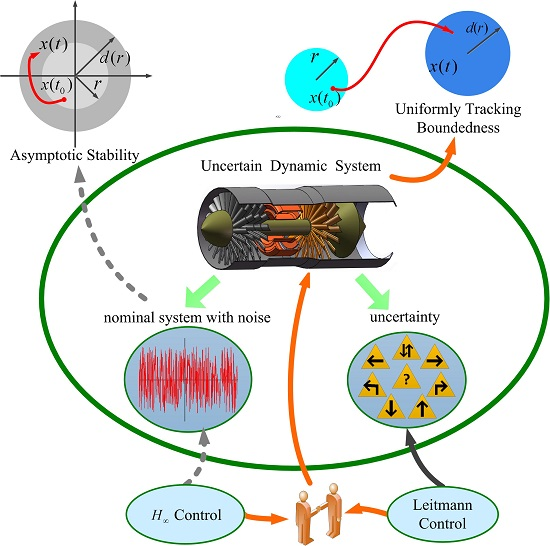
3.2. Design of /Leitmann Control for the Uncertain System
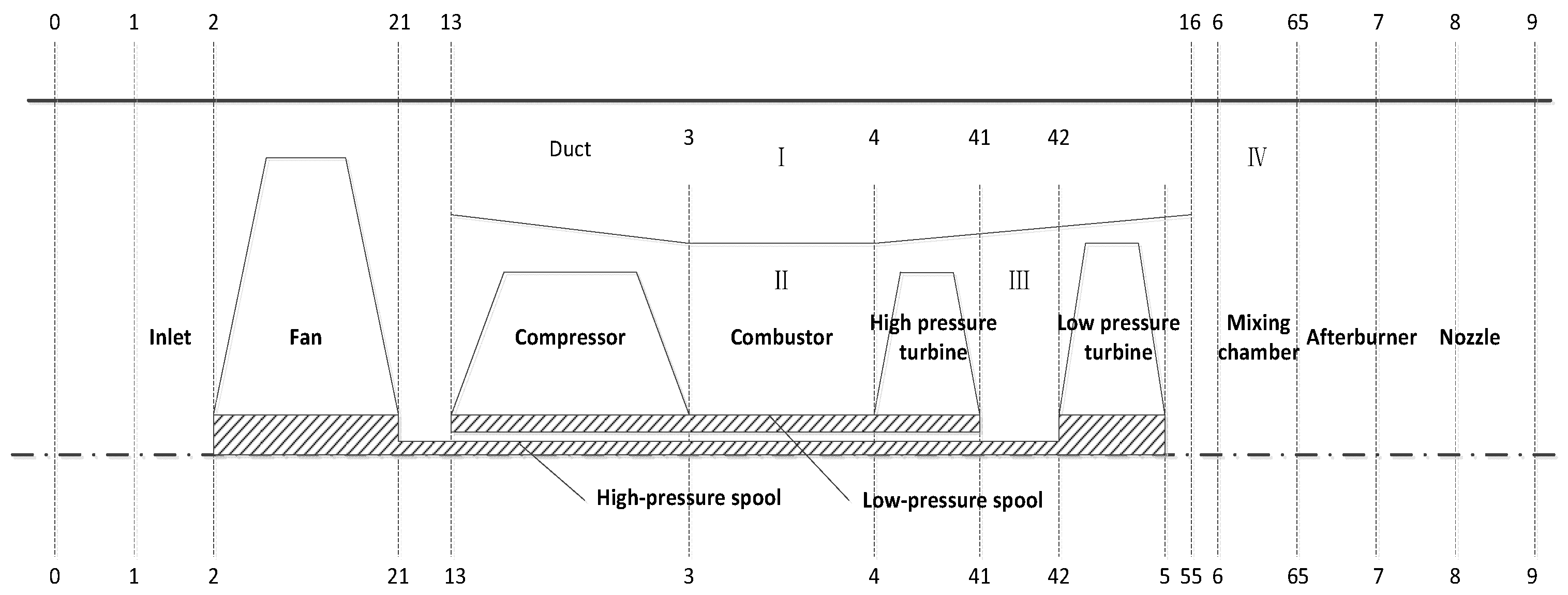
4. Application to Turbofan Engines
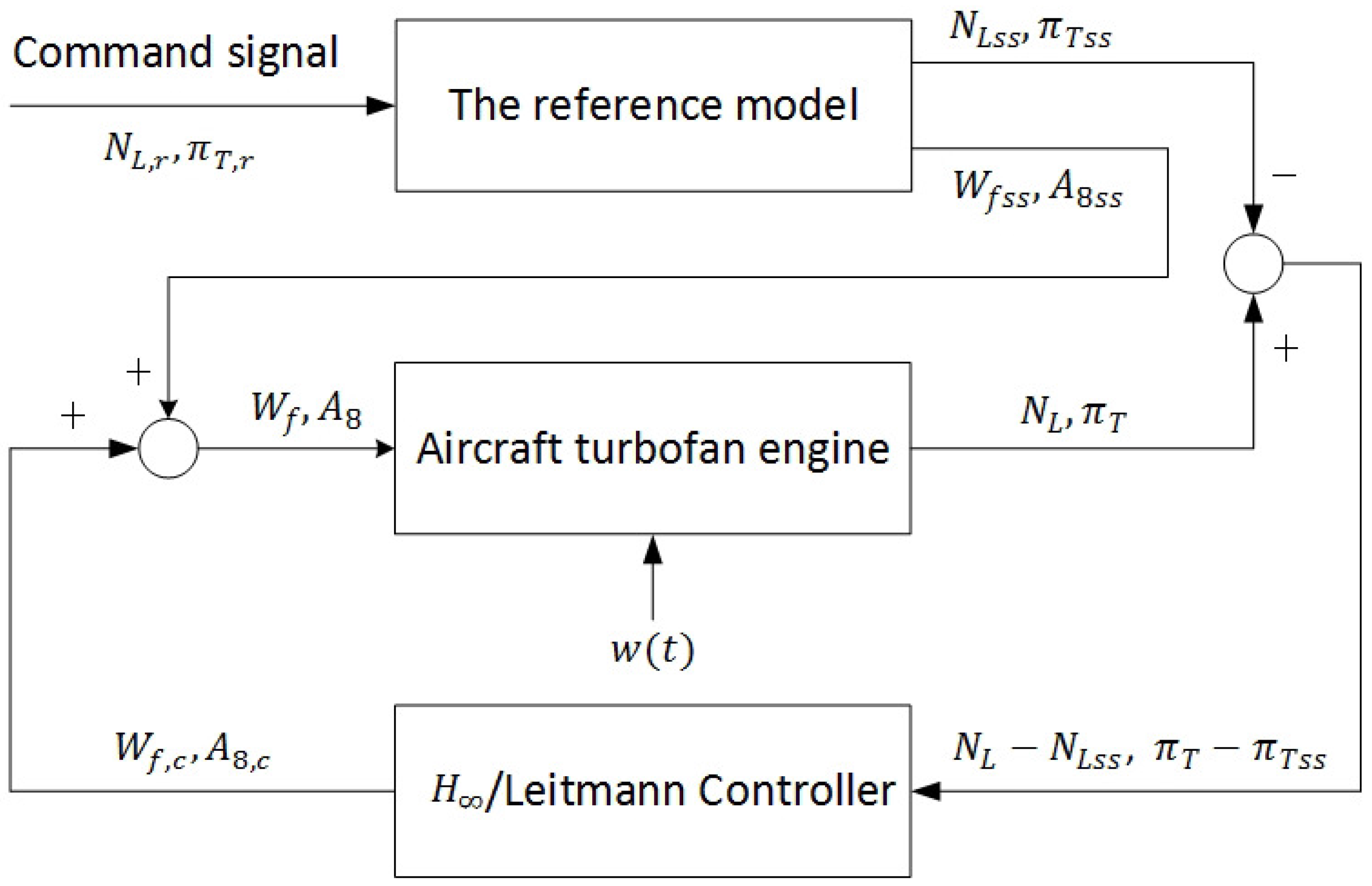
4.1. Control System of Turbofan Engines
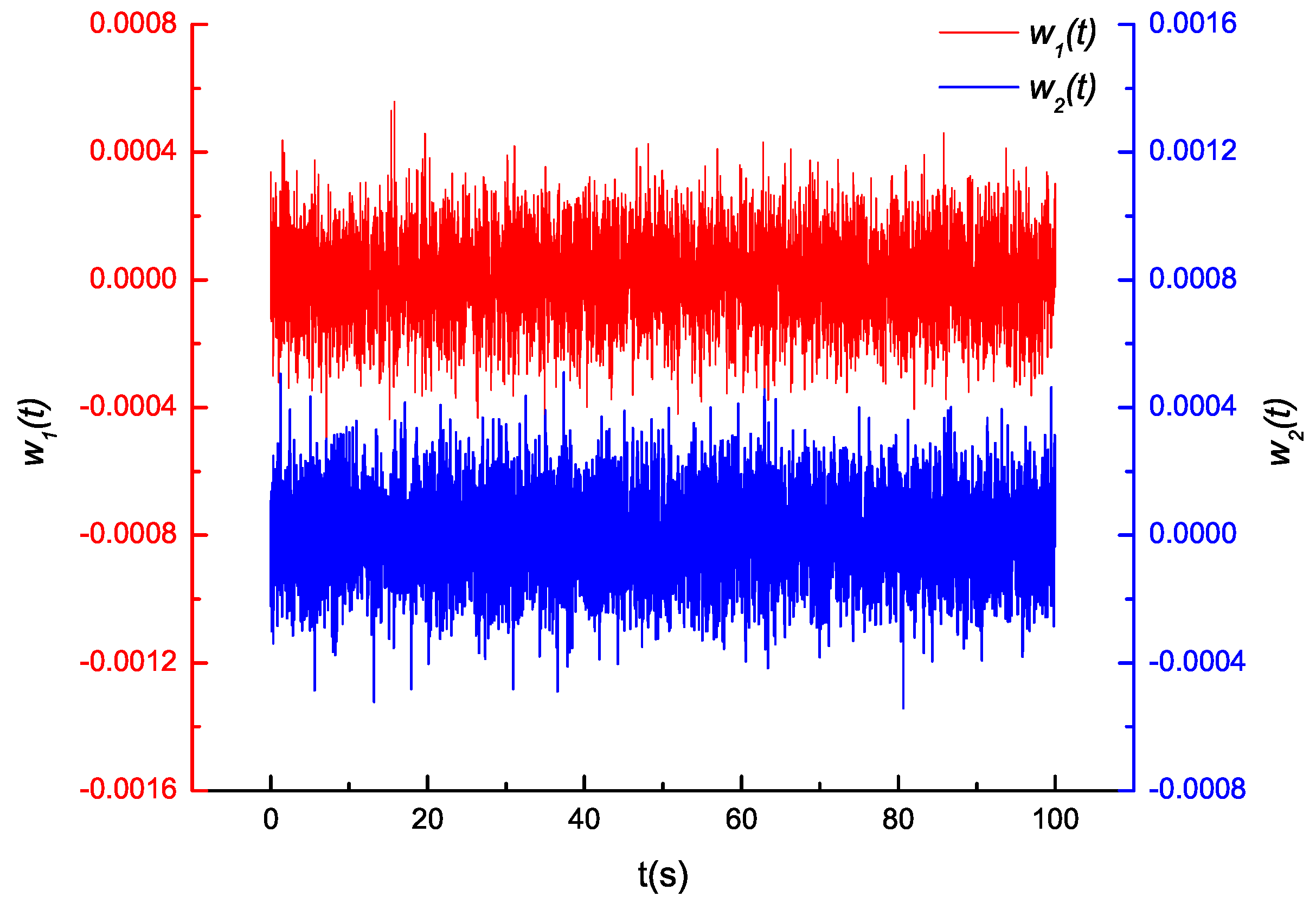
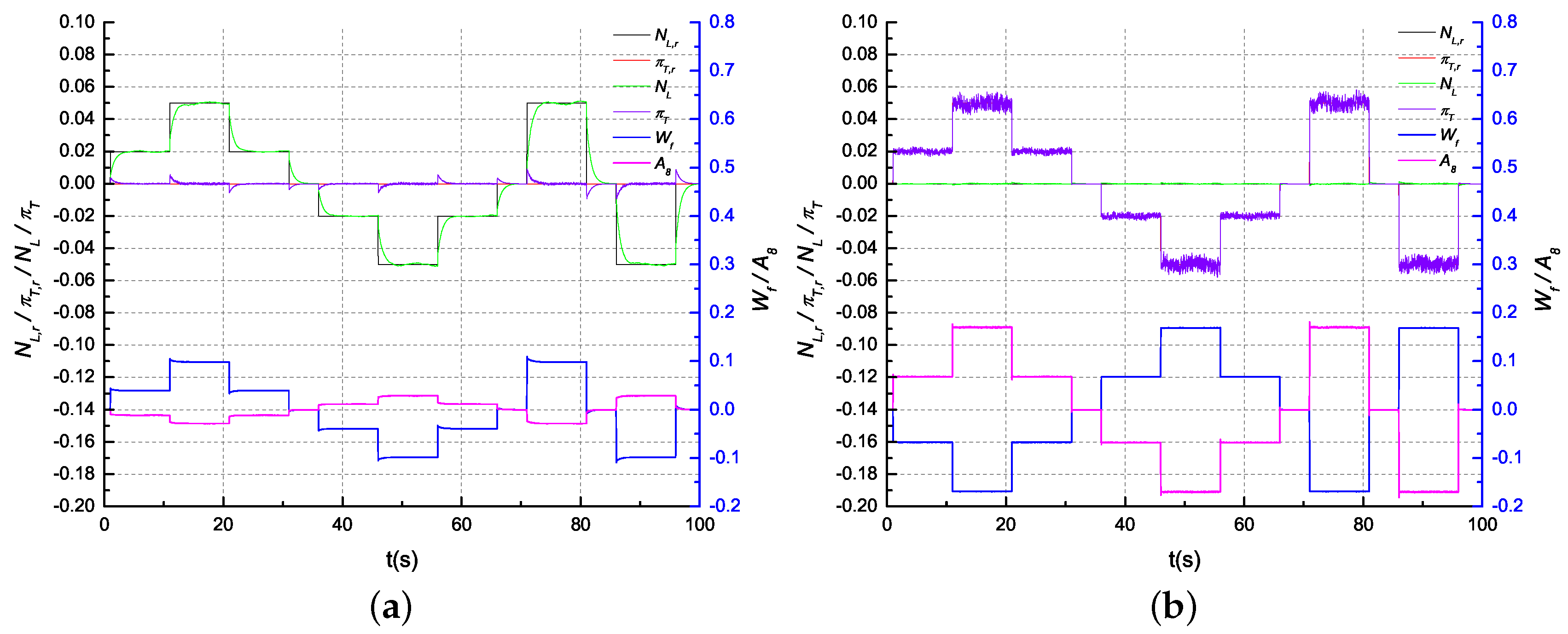
4.2. Numerical Simulation
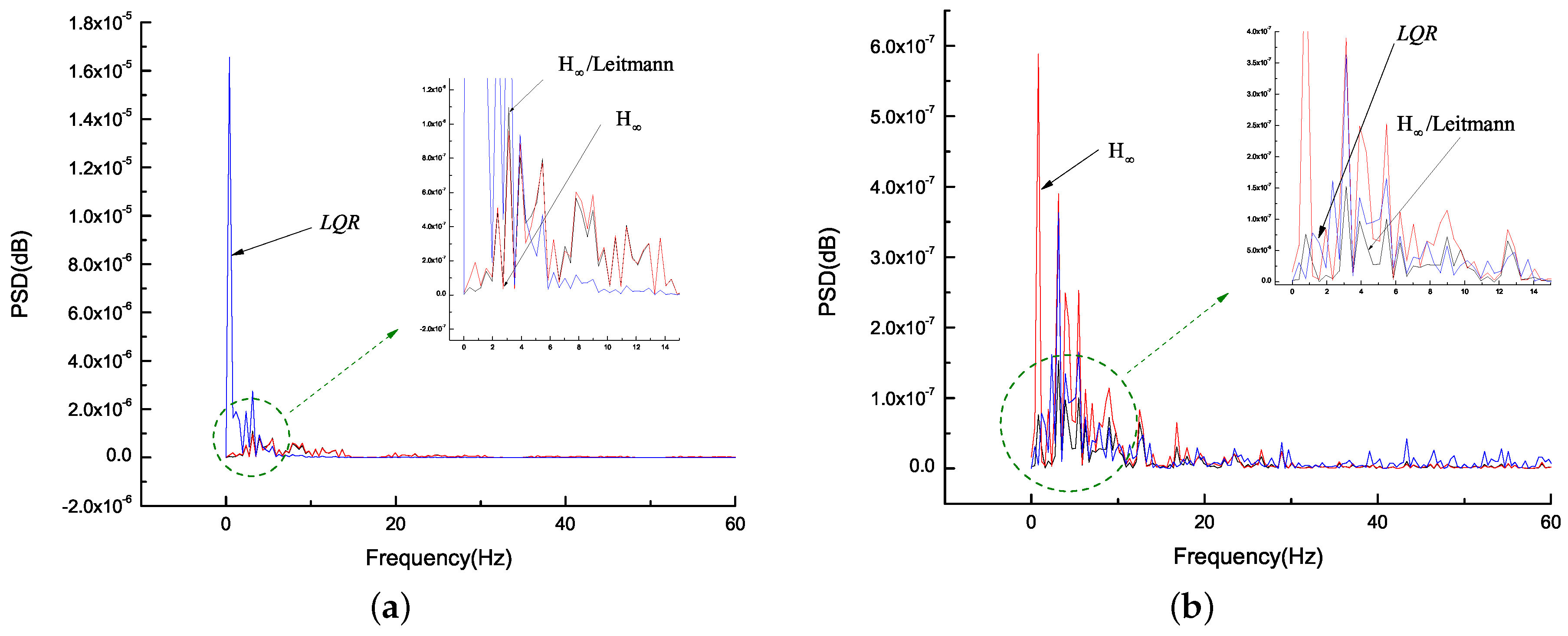
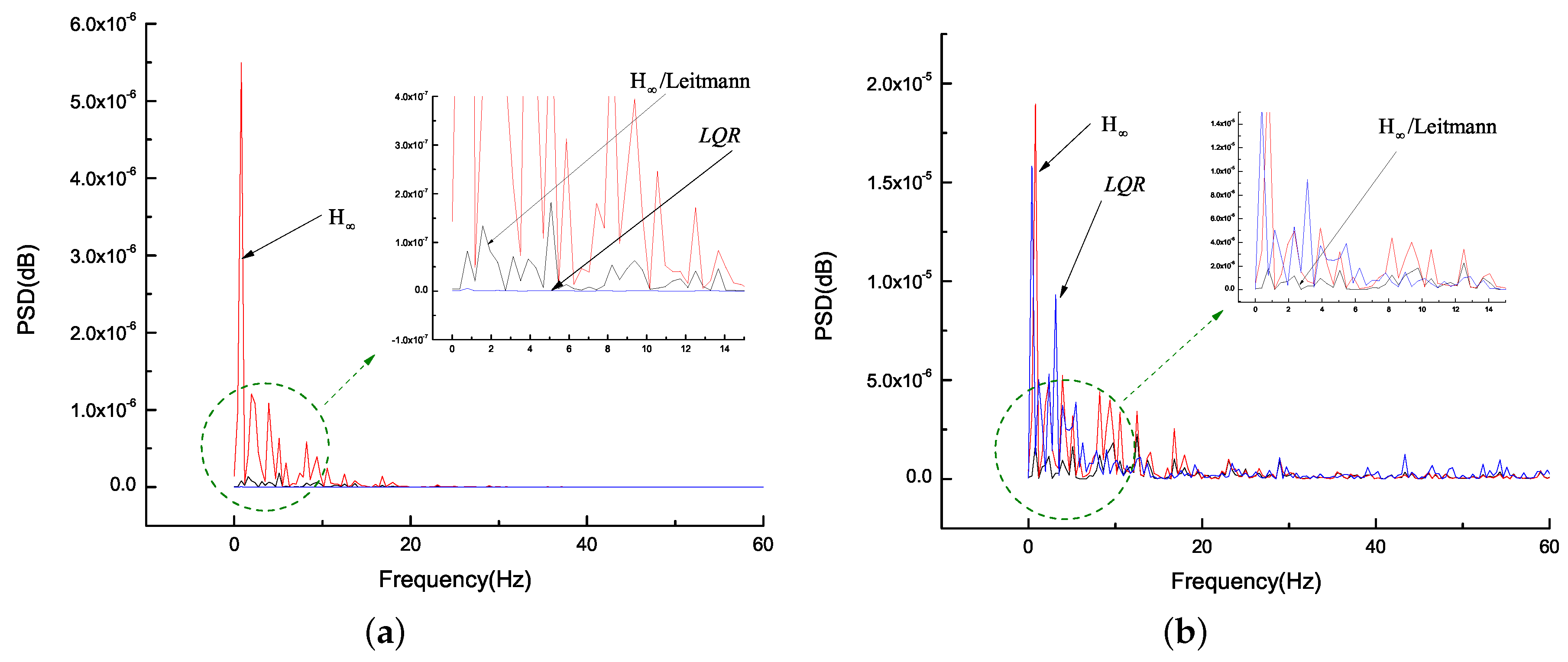
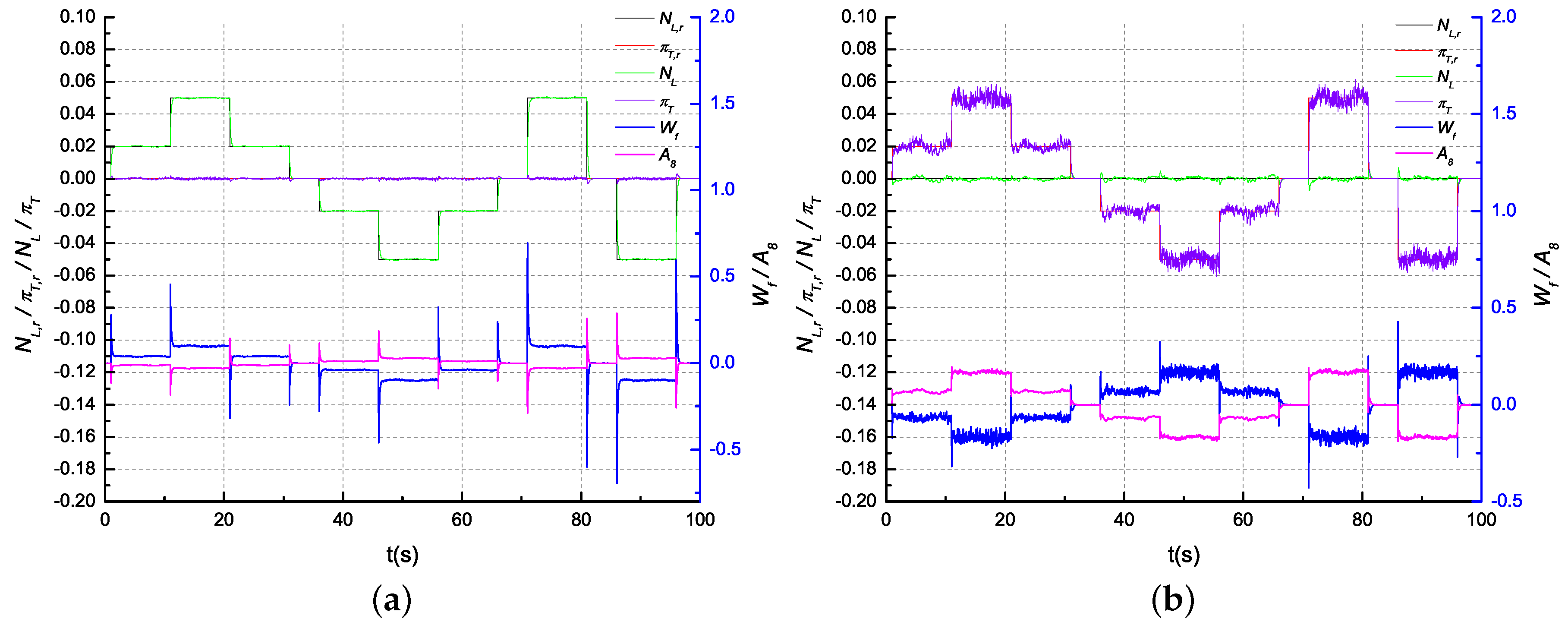
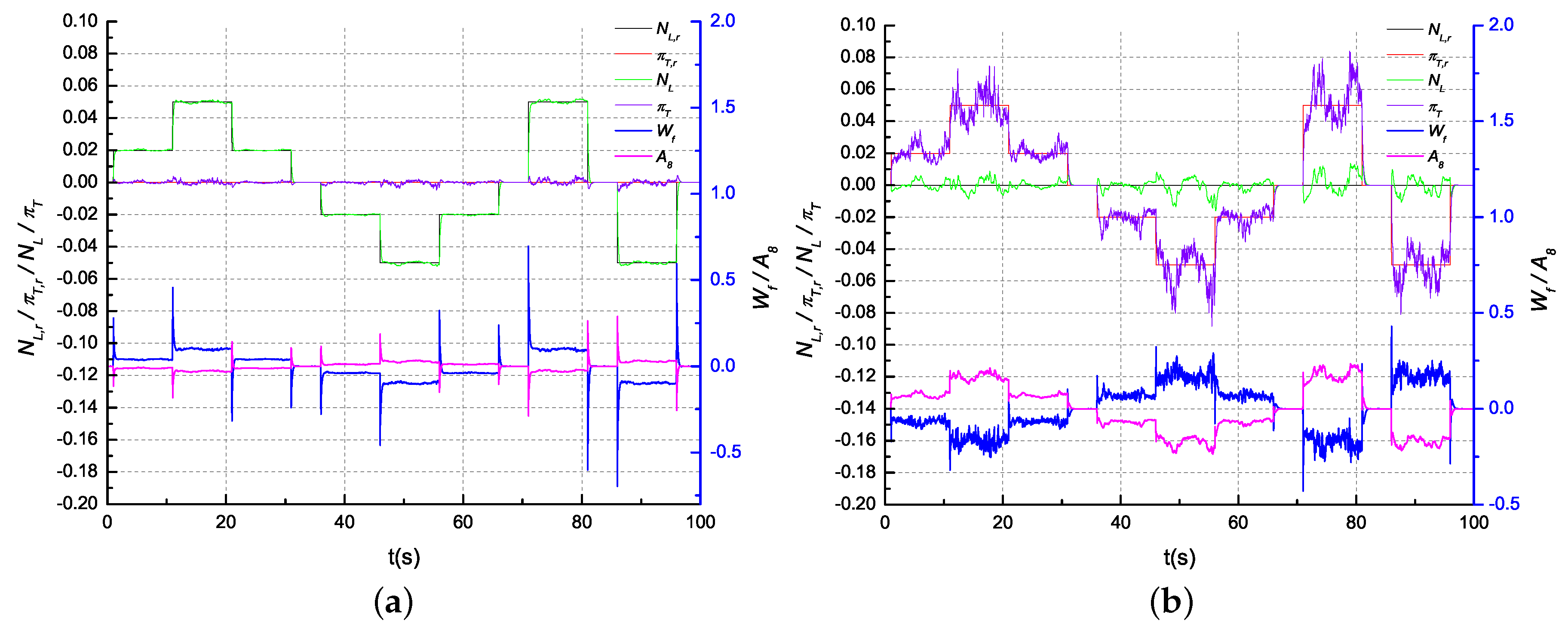
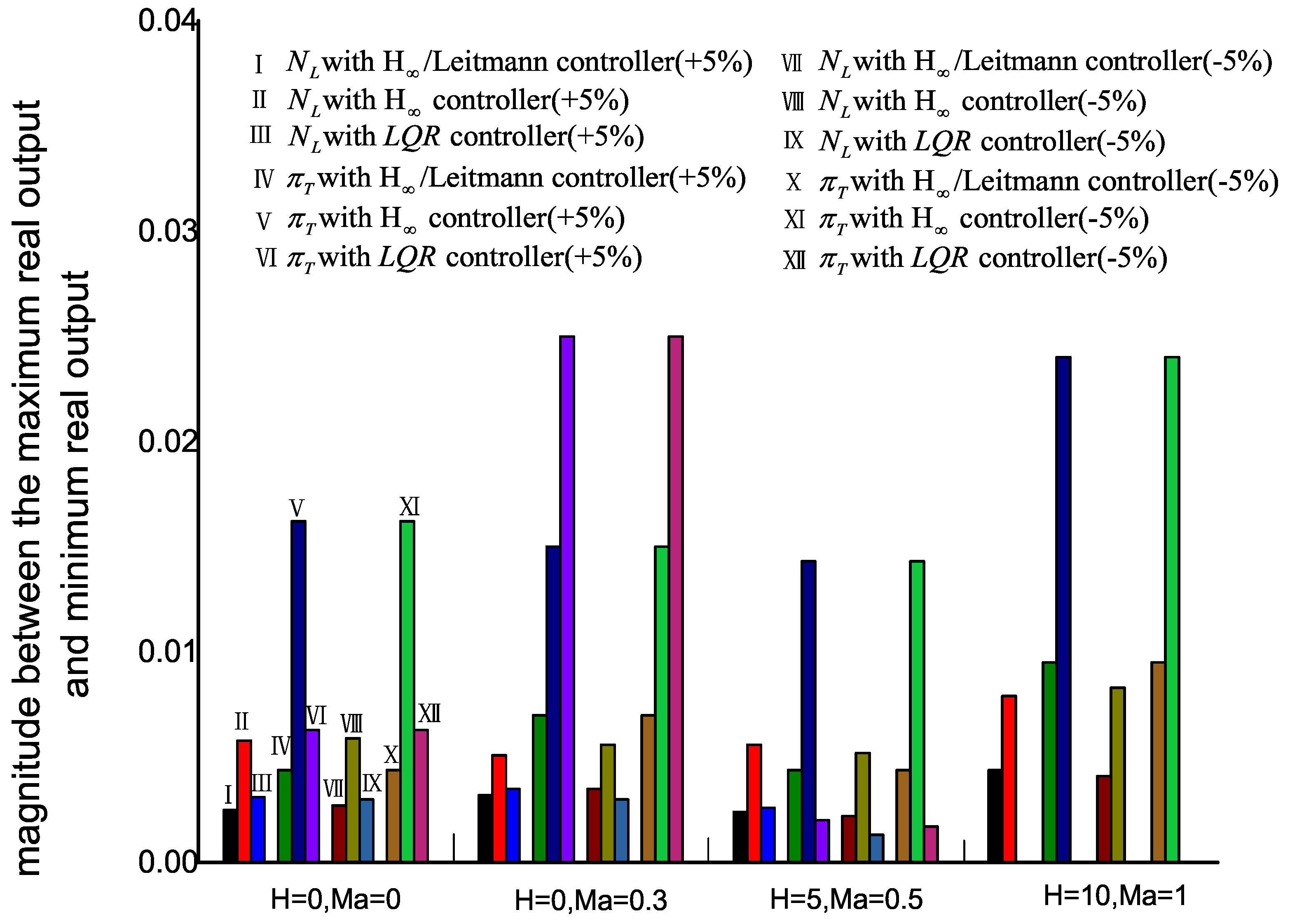
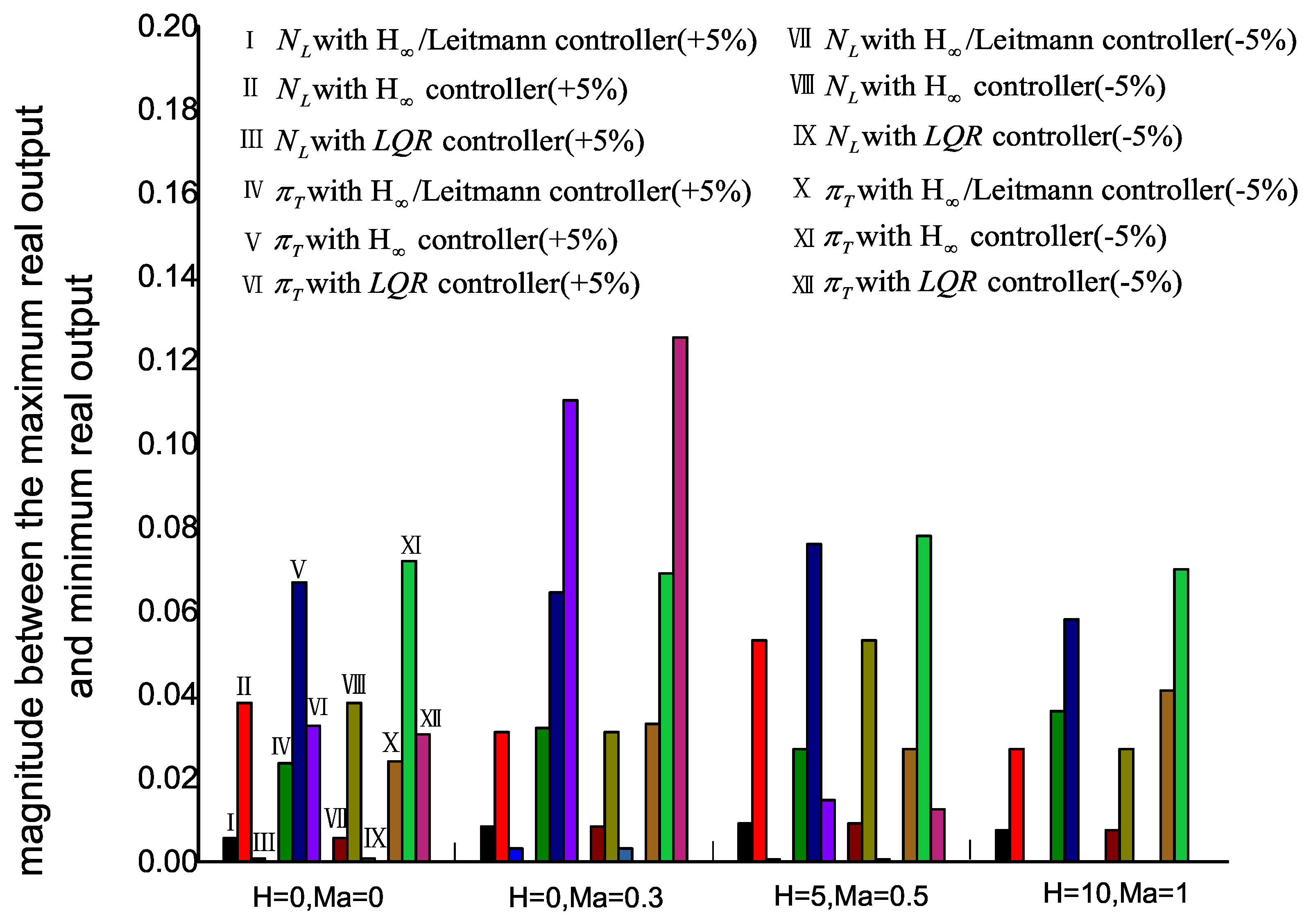
4.3. Analysis and Comparison of the Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Ballal, D.R.; Zelina, J. Progress in aero engine technology. J. Aircr. 2004, 41, 43–50. [Google Scholar] [CrossRef]
- Lyantsev, O.D.; Breikin, T.V.; Kulikov, G.G.; Arkov, V.Y. On-line performance optimisation of aero engine control system. Automatica 2003, 39, 2115–2121. [Google Scholar] [CrossRef]
- Roquemore, W.M.; Shouse, D.; Burrus, D.; Johnson, A.; Cooper, C.; Duncan, B.; Vihinen, I. Vortex combustor concept for gas turbine engines. In Proceedings of the 39 th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Soeder, J. F. F100 Multivariable Control Synthesis Program: Computer Implementation of the F100 Multivariable Control Algorithm; NASA: Cleveland, OH, USA, 1983; 2231.
- Pandey, S.K.; Mohanty, S.R.; Kishor, N.; Catalão, J.P. An Advanced LMI-Based-LQR Design for Load Frequency Control of an Autonomous Hybrid Generation System. In Technological Innovation for the Internet of Things; Springer: Berlin/Heidelberg, Germany, 2013; pp. 371–381. [Google Scholar]
- Pfeiffer, R.; Haraldsson, G.; Olsson, J.O.; TunestAl, P.; Johansson, R.; Johansson, B. System identification and LQG control of variable-compression HCCI engine dynamics. In Proceedings of the 2004 IEEE International Conference on Control Applications, Lund, Sweden, 2–4 September 2004; pp. 1442–1447. [Google Scholar]
- Karlsson, M.; Ekholm, K.; Strandh, P.; Johansson, R.; Tunestal, P. LQG control for minimization of emissions in a diesel engine. In Proceedings of the 2008 IEEE International Conference Control Applications, San Antonio, TX, USA, 3–5 September 2008; pp. 245–250. [Google Scholar]
- Sundararajan, N.; Joshi, S.M.; Armstrong, E.S. Attitude control system synthesis for the Hoop/Column antenna using the LQG/LTR method. Proceedings of Astrodynamics Conference, Williamsburg, VA, USA, 18–20 August 1986; pp. 469–478. [Google Scholar]
- Yuan, X.C.; Guo, Y.Q. Non-fully recovering LQG/LTR method and its application in aeroengine control. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibition Re-Ston, Cincinnati, OH, USA, 8–11 July 2007; pp. 1–7. [Google Scholar]
- Härefors, M. Application of H∞ robust control to the RM12 jet engine. Control Eng. Pract. 1997, 5, 1189–1201. [Google Scholar] [CrossRef]
- Kar, I.N.; Miyakura, T.; Seto, K. Bending and torsional vibration control of a flexible plate structure using H∞-based robust control law. IEEE Trans. Control Syst. Technol. 2000, 8, 545–553. [Google Scholar] [CrossRef]
- Alikhani, H.R.; Motlagh, M.M. Aero Engine Multivariable Robust Control. TJEAS J. 2016, 5, 228–232. [Google Scholar]
- Lu, L.; Turkoglu, K. H∞ Loop-Shaping Robust Differential Thrust Control Methodology for Lateral/Directional Stability of an Aircraft with a Damaged Vertical Stabilizer. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016; p. 1624. [Google Scholar]
- Qian, K.; Pang, X.; Xie, S.; He, X. Aeroengine PID multi-variable decoupling control system based on dynamic NNI. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 2685–2689. [Google Scholar]
- Vesterback, J.; Bochko, V.; Ruohonen, M.; Alander, J.; Bäck, A.; Nylund, M.; Östman, F. Engine parameter outlier detection: Verification by simulating PID controllers generated by genetic algorithm. In International Symposium on Intelligent Data Analysis; Springer: Berlin/Heidelberg, Germany, 2012; pp. 404–415. [Google Scholar]
- Leitmann, G. On the efficacy of nonlinear control in uncertain linear systems. J. Dyn. Syst. Meas. Control 1981, 103, 95–102. [Google Scholar] [CrossRef]
- Leitmann, G. On one approach to the control of uncertain systems. J. Dyn. Syst. Meas. Control 1993, 115, 373–380. [Google Scholar] [CrossRef]
- Corless, M. Control of uncertain nonlinear systems. J. Dyn. Syst. Meas. Control 1993, 115, 362–372. [Google Scholar] [CrossRef]
- Xiong, Z.K.; Leitmann, G.; Garofalo, F. Robustness of uncertain dynamical systems with delay without matching assumptions. IFAC Proc. Ser. 1989, 1, 269–273. [Google Scholar]
- Yu, Y. On stabilizing uncertain linear delay systems. J. Optim. Theory Appl. 1983, 41, 503–508. [Google Scholar] [CrossRef]
- Chen, Y.H.; Leitmann, G.; Kai, X.Z. Robust control design for interconnected systems with time-varying uncertainties. Int. J. Control 1991, 54, 1119–1142. [Google Scholar] [CrossRef]
- Hu, Y.; Ng, A. Active robust vibration control of flexible structures. J. Sound Vib. 2005, 288, 43–56. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, J. An algorithm of uniform ultimate boundedness for a class of switched linear systems. Int. J. Control 2002, 1, 166–170. [Google Scholar] [CrossRef]
- Aleksandrov, A.Y.; Chen, Y.; Platonov, A.V.; Zhang, L. Stability analysis and design of uniform ultimate boundedness control for a class of nonlinear switched systems. J. Differ. Equ. Appl. 2009, 18, 944–949. [Google Scholar]
- Burkan, R. Modelling of Bound Estimation Laws and Robust Controllers for Robot Manipulators Using Functions and Integration Techniques. J. Intell. Robot. Syst. 2010, 60, 365–394. [Google Scholar] [CrossRef]
- Lu, X.Y.; Spurgeon, S.K. Robust sliding mode control of uncertain nonlinear systems. Syst. Control Lett. 1997, 32, 75–90. [Google Scholar] [CrossRef]
- Chen, Y.H. A new approach to the control design of fuzzy dynamical systems. J. Dyn. Syst. Meas. Control 2011, 133, 061019. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.H.; Cheng, A. Robust Control for Fuzzy Dynamical Systems: Uniform Ultimate Boundedness and Optimality. IEEE Trans. Fuzzy Syst. 2012, 20, 1022–1031. [Google Scholar] [CrossRef]
- Xiong, D.; Chen, Y.H.; Zhao, H. Optimal robust decentralized control design for fuzzy complex systems. J. Intell. Fuzzy Syst. 2014, 26, 211–222. [Google Scholar]
- Zhang, R.; Pan, M.; Huang, J. Network-based guaranteed cost tracking control for aero-engine. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology (APISAT 2015), Canberra, Australia, 25–27 November 2015; pp. 292–301. [Google Scholar]
- Kulikov, G.G.; Thompson, H.A. (Eds.) Dynamic Modelling of Gas Turbines: Identification, Simulation, Condition Monitoring and Optimal Control; Springer Science & Business Media: London, UK, 2004; pp. 89–116. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Condition | Step | (Min/Max) | ||
|---|---|---|---|---|
| /Leitmann | LQR | |||
| km | (5%) | 0.0512/0.0487 | 0.0536/0.0478 | 0.0516/0.0485 |
| (−5%) | −0.0488/−0.0515 | −0.0481/−0.0540 | −0.0487/−0.0517 | |
| (5%) | 0.0026/−0.0030 | 0.0180/−0.0198 | 0.0004/−0.0004 | |
| (−5%) | 0.0024/−0.0031 | 0.0178/−0.0200 | 0.0004/−0.0004 | |
| km | (5%) | 0.0517/0.0485 | 0.0531/0.0480 | 0.0518/0.0483 |
| (−5%) | −0.0485/−0.0520 | −0.0481/−0.0537 | −0.0484/−0.0514 | |
| (5%) | 0.0039/−0.0043 | 0.0140/−0.0168 | 0.0016/−0.0017 | |
| (−5%) | 0.0037/−0.0045 | 0.0138/−0.0170 | 0.0015/−0.0018 | |
| km | (5%) | 0.0513/0.0489 | 0.0538/0.0482 | 0.0515/0.0489 |
| (−5%) | −0.0491/−0.0513 | −0.0485/−0.0537 | −0.0489/−0.0502 | |
| (5%) | 0.0042/−0.0048 | 0.0270/−0.0258 | 0.0002/−0.0004 | |
| (−5%) | 0.0040/−0.0050 | 0.0269/−0.0260 | 0.0002/−0.0004 | |
| km | (5%) | 0.0523/0.0479 | 0.0548/0.0469 | −NaN/−NaN |
| (−5%) | −0.0482/−0.0523 | −0.0472/−0.0555 | −NaN/−NaN | |
| (5%) | 0.0035/−0.0038 | 0.0125/−0.0143 | −NaN/−NaN | |
| (−5%) | 0.0033/−0.0040 | 0.0123/−0.0145 | −NaN/−NaN | |
| Operating Condition | Step | (Min/Max) | ||
|---|---|---|---|---|
| /Leitmann | LQR | |||
| km | (5%) | 0.0021/−0.0020 | 0.0076/−0.0083 | 0.0031/−0.0032 |
| (−5%) | 0.0020/−0.0023 | 0.0073/−0.0086 | 0.0031/−0.0033 | |
| (5%) | 0.0617/0.0381 | 0.0980/0.0311 | 0.0640/0.0315 | |
| (−5%) | −0.0380/−0.0620 | −0.0320/−0.1040 | −0.0340/−0.0645 | |
| km | (5%) | 0.0035/−0.0033 | 0.0070/−0.0078 | 0.0125/−0.0125 |
| (−5%) | 0.0032/−0.0035 | 0.0068/−0.0080 | 0.0125/−0.0125 | |
| (5%) | 0.0670/0.0350 | 0.0962/0.0318 | 0.0955/−0.0149 | |
| (−5%) | −0.0350/−0.0680 | −0.0330/−0.1020 | 0.0140/−0.1115 | |
| km | (5%) | 0.0019/−0.0023 | 0.0070/−0.0071 | 0.0010/−0.0010 |
| (−5%) | 0.0018/−0.0025 | 0.0069/−0.0073 | 0.0008/−0.0009 | |
| (5%) | 0.0640/0.0370 | 0.1050/0.0290 | 0.0582/0.0434 | |
| (−5%) | −0.0380/−0.0650 | −0.0310/−0.1090 | −0.0435/−0.0561 | |
| km | (5%) | 0.0045/−0.0048 | 0.0100/−0.0139 | −NaN/−NaN |
| (−5%) | 0.0044/−0.0050 | 0.0098/−0.0140 | −NaN/−NaN | |
| (5%) | 0.0670/0.0310 | 0.0870/0.0290 | −NaN/−NaN | |
| (−5%) | −0.0280/−0.0690 | −0.0310/−0.1010 | −NaN/−NaN | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, M.; Zhang, K.; Chen, Y.-H.; Huang, J. A New Robust Tracking Control Design for Turbofan Engines: H∞/Leitmann Approach. Appl. Sci. 2017, 7, 439. https://doi.org/10.3390/app7050439
Pan M, Zhang K, Chen Y-H, Huang J. A New Robust Tracking Control Design for Turbofan Engines: H∞/Leitmann Approach. Applied Sciences. 2017; 7(5):439. https://doi.org/10.3390/app7050439
Chicago/Turabian StylePan, Muxuan, Kaiwen Zhang, Ye-Hwa Chen, and Jinquan Huang. 2017. "A New Robust Tracking Control Design for Turbofan Engines: H∞/Leitmann Approach" Applied Sciences 7, no. 5: 439. https://doi.org/10.3390/app7050439
APA StylePan, M., Zhang, K., Chen, Y. -H., & Huang, J. (2017). A New Robust Tracking Control Design for Turbofan Engines: H∞/Leitmann Approach. Applied Sciences, 7(5), 439. https://doi.org/10.3390/app7050439