
Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Intelligent Vehicle Modelling
3. AEB Control System Structure Design
4. Controller Design of AEBS
4.1. Optimization Index Design of Model Predictive Controller
4.2. Optimization Problem Design for Model Predictive Control
4.3. Solve the Nonlinear Constrained Predictive Optimal Control
4.4. Execution Controller Design at Lower Level
5. Simulation Analysis
6. Conclusions
- (1)
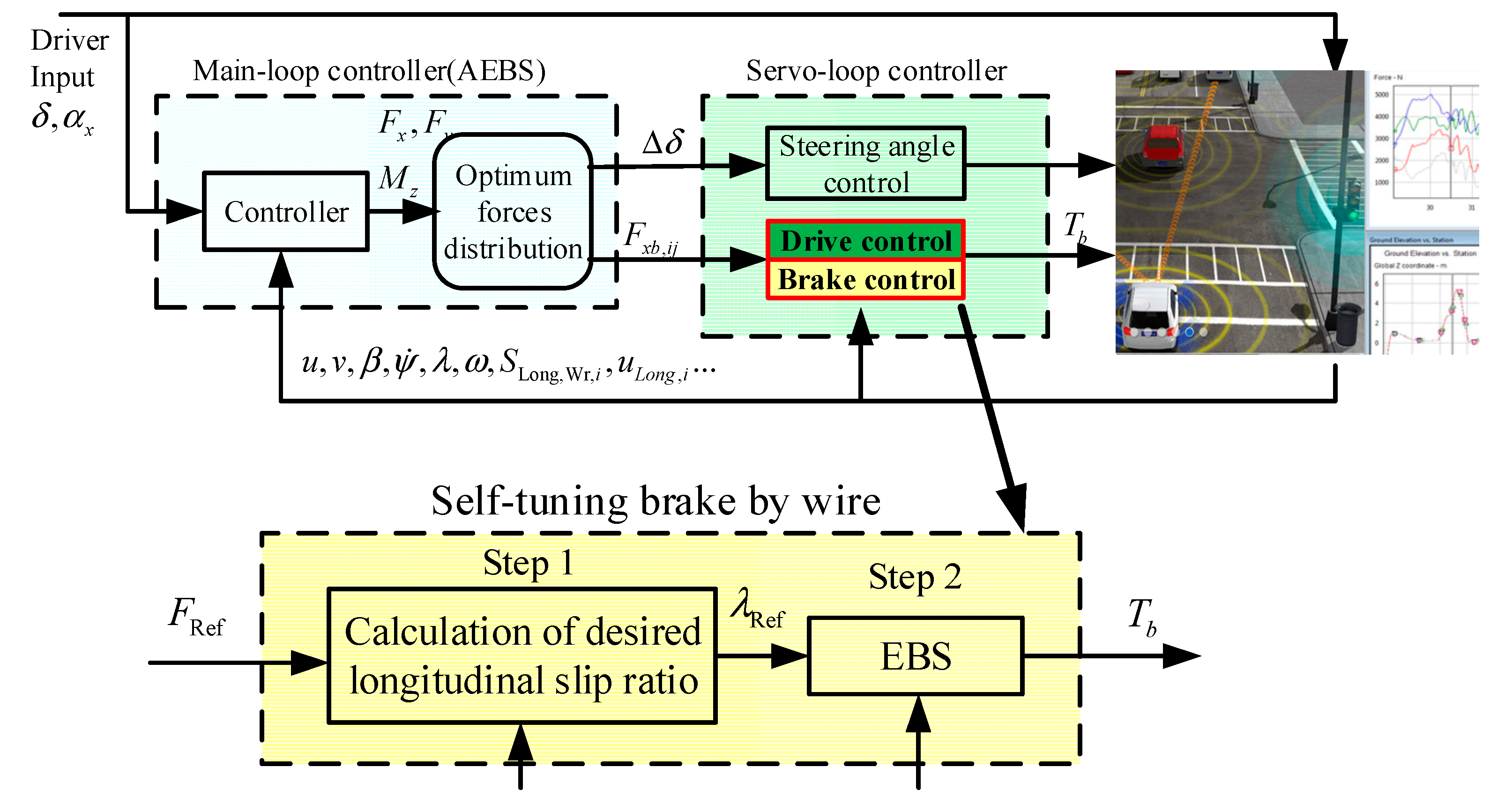
- A hierarchical control system for the AEBS is designed to decouple and coordinate the upper layer decision target value and the corresponding tracking target of the low layer execution system. Meanwhile, a multi-performance quantification function is designed to evaluate the coordination and optimization of vehicle safety and comfort.
- (2)
- Based on the nonlinear model prediction algorithm, the advanced emergency braking control is designed to solve the problem of integrated optimization and get the optimize control target values. Then, a brake by wire system is introduced to implement these target values based on the Nonsingular Fast Terminal Sliding Mode control algorithm, which can track the aim and converge in a finite time.
- (3)
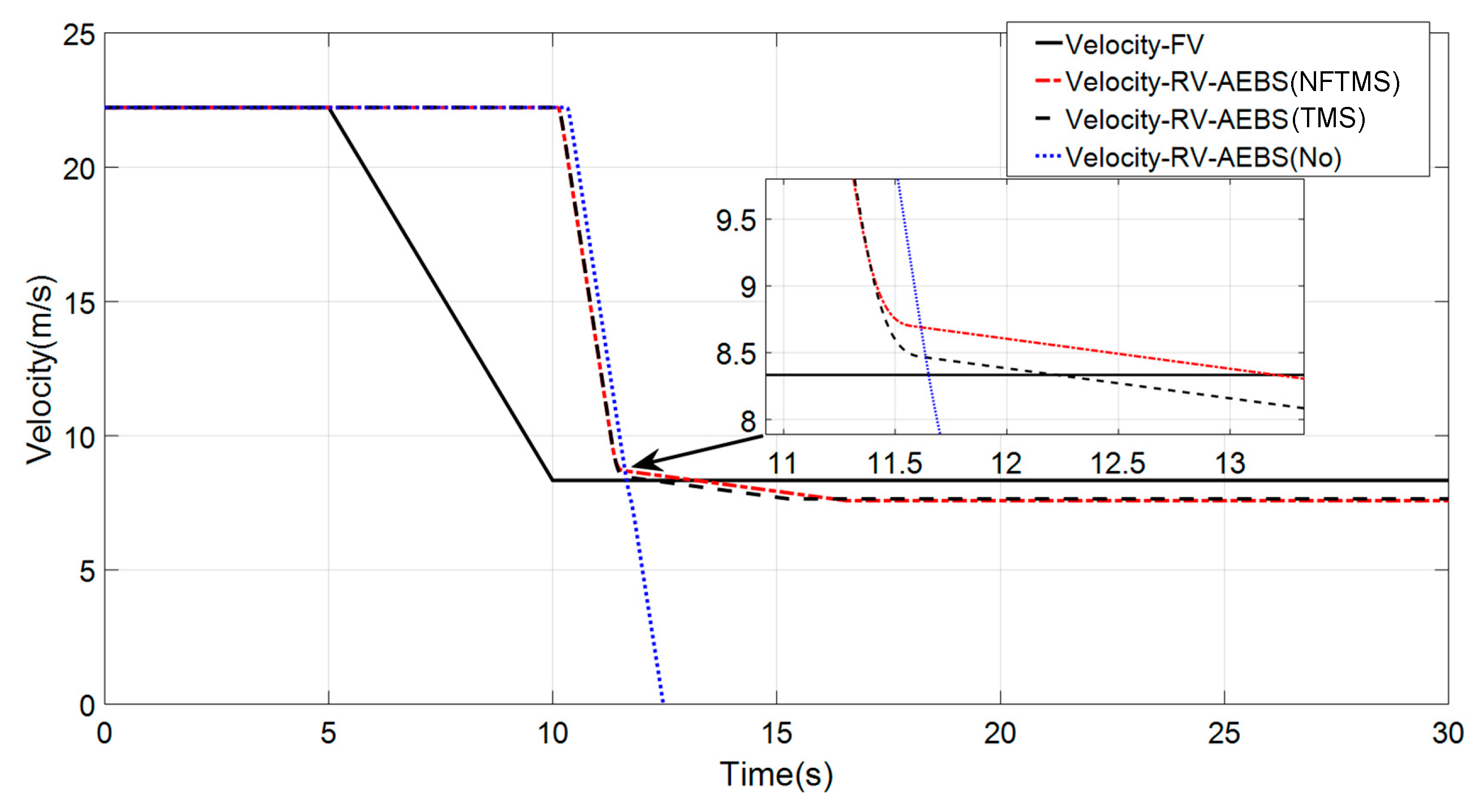
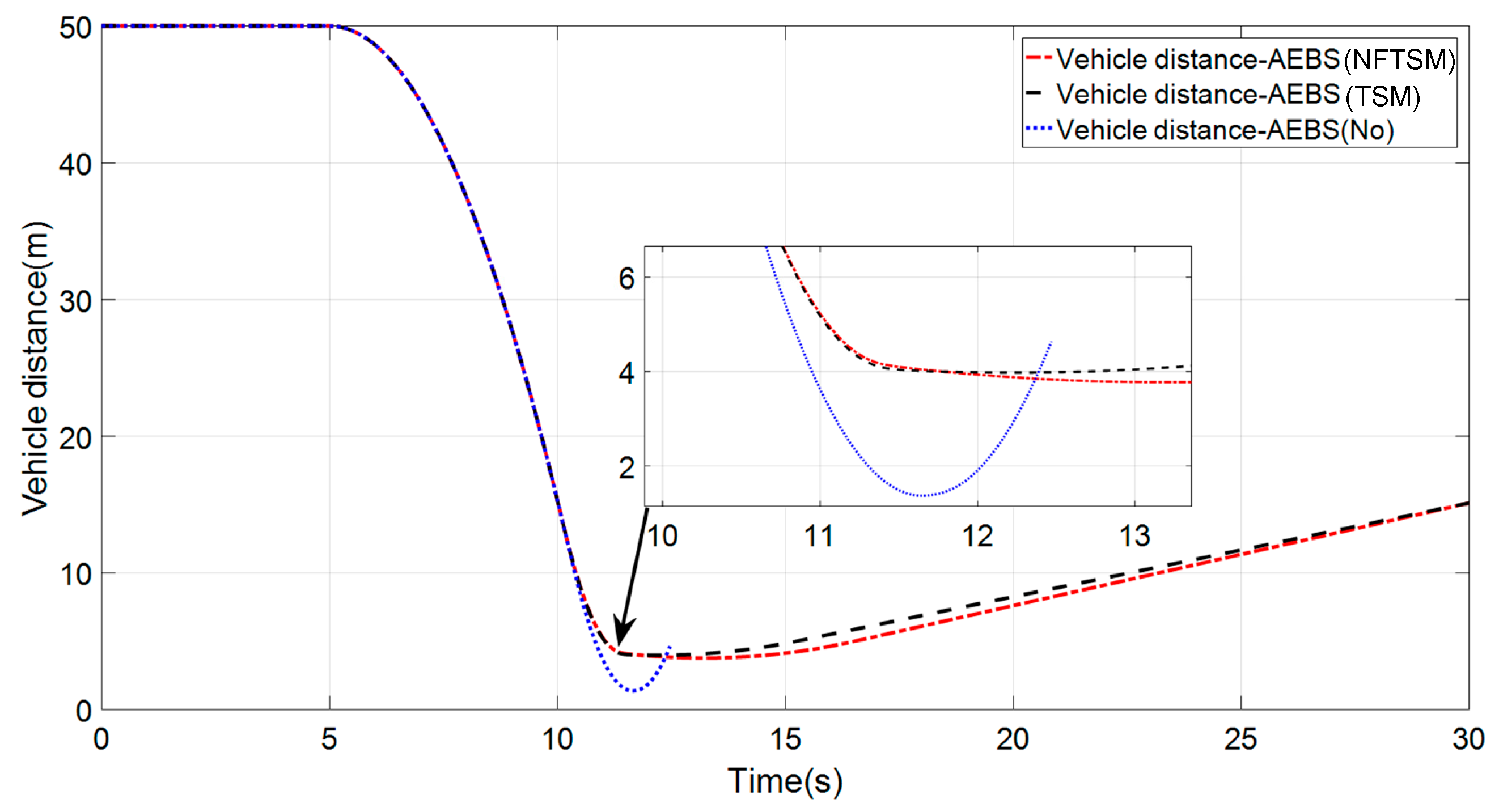
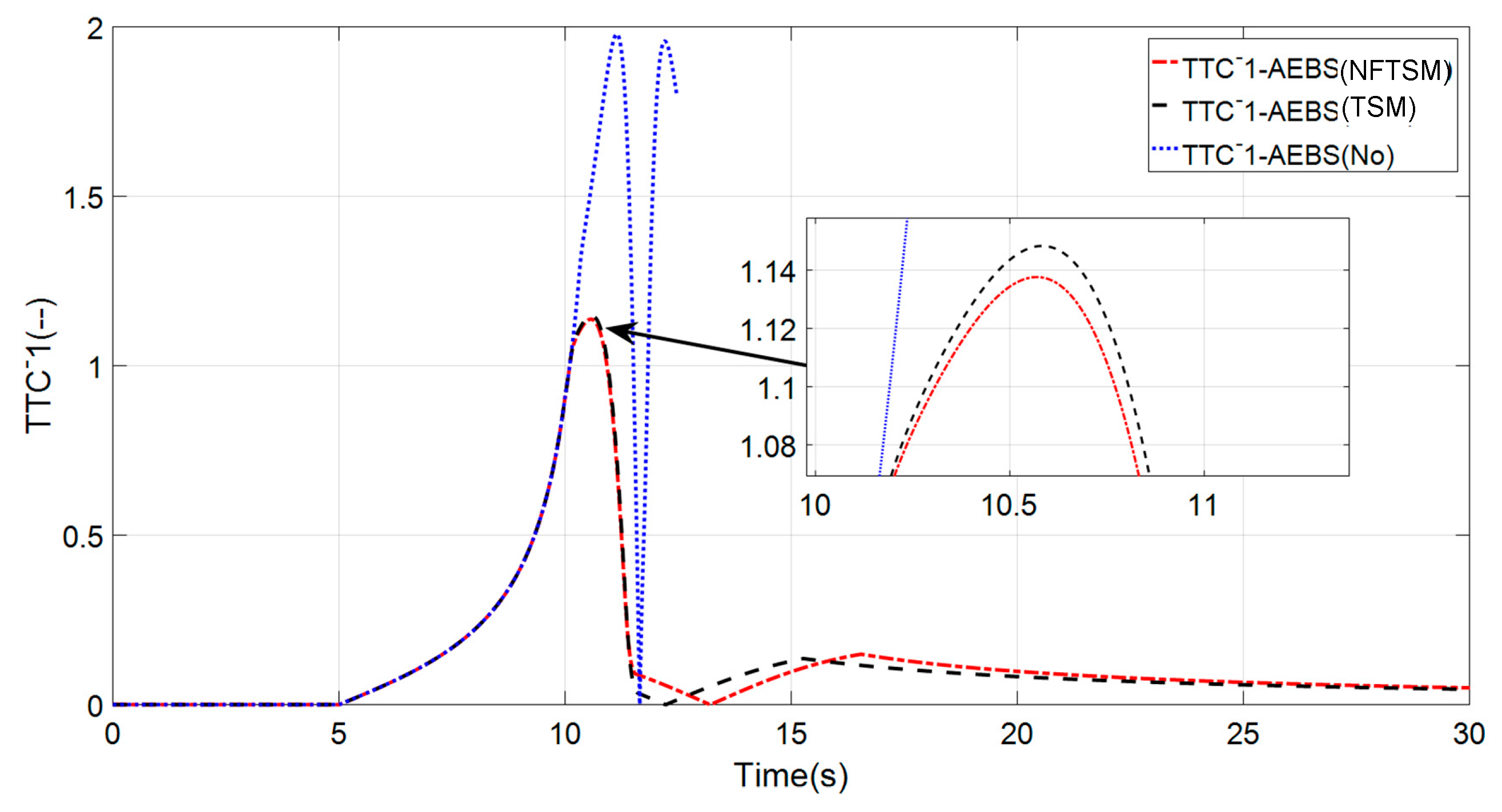
- Simulation is carried out for different conditions and the results show that the proposed Advanced Emergency Braking system (AEBS) has the advantages of comprehensive safety, comfortable vehicle performance, and better driving comfort, while ensuring the safety of vehicle emergency braking to avoid or mitigate collision hazards.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, C.; Shih, M. Dynamic analysis and control of an anti-lock brake system for a motorcycle with a camber angle. Veh. Syst. Dyn. 2011, 49, 639–656. [Google Scholar] [CrossRef]
- Oleksowicz, S.A.; Burnham, K.J.; Southgate, A.; McCoy, C.; Waite, G.; Hardwick, G.; Harrington, C.; McMurran, R. Regenerative braking strategies, vehicle safety and stability control systems: Critical use-case proposals. Veh. Syst. Dyn. 2013, 51, 684–699. [Google Scholar] [CrossRef]
- Verma, R.; Ginoya, D.; Shendge, P.D.; Phadke, S.B. Slip regulation for anti-lock braking systems using multiple surface sliding controller combined with inertial delay control. Veh. Syst. Dyn. 2015, 53, 1150–1171. [Google Scholar] [CrossRef]
- Peng, S.T.; Chang, C.C.; Sheu, J.J. On robust bounded control of the combined wheel slip with integral compensation for an autonomous 4WS4WD vehicle. Veh. Syst. Dyn. 2007, 45, 477–503. [Google Scholar] [CrossRef]
- Li, W.; Potter, T.; Jones, R. Steering of 4WD Vehicles with Independent Wheel Torque Control. Veh. Syst. Dyn. 1998, 29, 205–218. [Google Scholar] [CrossRef]
- Morgando, A.; Velardocchia, M.; Vigliani, A.; van Leeuwen, B.; Ondrak, V. An alternative approach to automotive ESC based on measured wheel forces. Veh. Syst. Dyn. 2011, 49, 1855–1871. [Google Scholar] [CrossRef]
- Zhang, R.; Feng, Y.; Lv, Z. Development and Characterization a Single-Active-Chamber Piezoelectric Membrane Pump with Multiple Passive Check Valves. Sensors 2016, 16, 2108. [Google Scholar] [CrossRef]
- Sabbioni, E.; Cheli, F.; d’alessandro, V. Analysis of ABS/ESP Control Logics Using a HIL Test Bench. In Proceedings of the SAE 2011 World Congress & Exhibition, Detroit, MI, USA, 12–14 April 2011. [Google Scholar]
- Song, P.; Tomizuka, M.; Zong, C.F. A novel integrated chassis controller for full drive-by-wire vehicles. Veh. Syst. Dyn. 2015, 53, 215–236. [Google Scholar] [CrossRef]
- Zhang, Q.; Lapierre, L.; Xiang, X.B. Distributed Control of Coordinated Path Tracking for Networked Nonholonomic Mobile Vehicles. IEEE Trans. Ind. Inform. 2013, 9, 472–484. [Google Scholar] [CrossRef]
- Xiao, H.; Chen, W.; Zhou, H.; Zu, J.W. Integrated control of active suspension system and electronic stability programme using hierarchical control strategy: Theory and experiment. Veh. Syst. Dyn. 2011, 49, 381–397. [Google Scholar] [CrossRef]
- Gordon, T.; Howell, M.; Brandao, F. Integrated control methodologies for road vehicles. Veh. Syst. Dyn. 2003, 40, 157–190. [Google Scholar] [CrossRef]
- Ahn, D.; Park, H.; Hwang, S.; Park, T. Reliable Identification of Vehicle-Boarding Actions Based on Fuzzy Inference System. Sensors 2017, 17, 333. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Wong, P.K.; Ma, X.; Xie, Z. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 2017, 55. [Google Scholar] [CrossRef]
- Aksjonov, A.; Augsburg, K.; Vodovozov, V. Design and Simulation of the Robust ABS and ESP Fuzzy Logic Controller on the Complex Braking Maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous Vehicles: Disengagements, Accidents and Reaction Times. PLoS ONE 2016, 11, e0168054. [Google Scholar] [CrossRef] [PubMed]
- Petit, J.; Shladover, S.E. Potential Cyberattacks on Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 546–556. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Zhou, M.C. An Epidemic Routing Strategy for Vehicular Ad Hoc Wireless Networks in Intelligent Transportation Systems. Int. J. Intell. Control Syst. 2005, 10, 86–93. [Google Scholar]
- Yamani, Y.; Horrey, W.J.; Liang, Y.; Fisher, D.L. Age-Related Differences in Vehicle Control and Eye Movement Patterns at Intersections: Older and Middle-Aged Drivers. PLoS ONE 2016, 11, e0164124. [Google Scholar] [CrossRef] [PubMed]
- Wu, N.; Zhou, M.C. Modeling and Deadlock Avoidance of Automated Manufacturing Systems with Multiple Automated Guided Vehicles. IEEE Trans. Syst. Man Cybern. 2005, 35, 1193–1202. [Google Scholar] [CrossRef]
- Chen, C.; Neal, D.; Zhou, M. Understanding the Evolution of a Disaster—A Framework for Assessing Crisis in a System Environment (FACSE). Nat. Hazards 2013, 65 Pt B, 407–422. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative Adaptive Cruise Control in Real Traffic Situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar]
- Karagiannis, G.; Altintas, O.; Ekici, E. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar]
- Gao, B.; Zhang, R.; Lou, X. Modeling Day-to-day Flow Dynamics on Degradable Transport Network. PLoS ONE 2016, 11, e0168241. [Google Scholar]
- Jamilah, A.-R.; Yoichi, M.; Pankaj, G.; Ichiro, U.; Atsushi, W.; Jani, E.; Takayuki, S.; Shin, I. Multi-Sensor Based State Prediction for Personal Mobility Vehicles. PLoS ONE 2016, 11, e0162593. [Google Scholar]
- Li, L.; Wen, D.; Zheng, N.-N.; Shen, L.-C. Cognitive cars: A new frontier for ADAS research. IEEE Trans. Intell. Transp. Syst. 2012, 13, 395–407. [Google Scholar]
- Zhang, F.; Xi, J.; Langari, R. Real-Time Energy Management Strategy Based on Velocity Forecasts Using V2V and V2I Communications. IEEE Trans. Intell. Trans. Syst. 2017, 18, 416–430. [Google Scholar]
- Wu, J.; Chen, L.; Feng, Y.; Zheng, Z.; Zhou, M.C.; Wu, Z. Predicting Quality of Service for Selection by Neighborhood-Based Collaborative Filtering. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 428–439. [Google Scholar]
- Oncu, S.; Ploeg, J.; van de Wouw, N.; Nijmeijer, H. Cooperative adaptive cruise control: Network-aware analysis of string stability. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1527–1537. [Google Scholar]
- Huynh, P.; Do, T.-H.; Yoo, M. A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System. Sensors 2017, 17, 347. [Google Scholar]
- Lidström, K.; Sjöberg, K.; Holmberg, U.; Andersson, J.; Bergh, F.; Bjäde, M.; Spencer, M. A modular CACC system integration and design. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1050–1061. [Google Scholar]
- Bao, X.; Li, H.; Xu, D.; Jia, L.; Ran, B.; Rong, J. Traffic Vehicle Counting in Jam Flow Conditions Using Low-Cost and Energy-Efficient Wireless Magnetic Sensors. Sensors 2016, 16, 1868. [Google Scholar]
- Yang, J.; Hou, E.; Zhou, M.C. Front Sensor and GPS-based Lateral Control of Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2013, 14, 146–154. [Google Scholar]
- Lai, Y.C.; Wen, T. Design and Implementation of an Optimal Energy Control System for Fixed-Wing Unmanned Aerial Vehicles. Appl. Sci. 2016, 6, 369. [Google Scholar]
- Chen, S.-L.; Cheng, C.-Y.; Hu, J.-S.; Jiang, J.-F.; Chang, T.-K.; Wei, H.-Y. Strategy and Evaluation of Vehicle Collision Avoidance Control via Hardware-in-the-Loop Platform. Appl. Sci. 2016, 6, 327. [Google Scholar]
- Hamberg, R.; Hendriks, T.; Bijlsma, T. (Eds.) Temporal Performance of Advanced Driver Assistance Systems vis-á-vis Human Driving Behavior in Dense Traffic. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015. [Google Scholar]
- Da Lio, M.; Biral, F.; Bertolazzi, E.; Galvani, M.; Bosetti, P.; Windridge, D.; Saroldi, A.; Tango, F. Artificial Co-Drivers as a Universal Enabling Technology for Future Intelligent Vehicles and Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2015, 16, 244–263. [Google Scholar]
- Höltl, A.; Trommer, S. Driver Assistance Systems for Transport System Efficiency: Influencing Factors on User Acceptance. J. Intell. Transp. Syst. 2013, 17. [Google Scholar] [CrossRef]
- Kato, S.; Tsugawa, S.; Tokuda, K.; Matsui, T.; Fujii, H. Vehicle control algorithms for cooperative driving with automated vehicles and intervehicle communications. IEEE Trans. Intell. Transp. Syst. 2002, 3, 155–161. [Google Scholar]
- You, F.; Zhang, R.; Lie, G.; Wang, H.; Wen, H.; Xu, J. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42, 5932–5946. [Google Scholar]
- Huang, Y.-S.; Weng, Y.-S.; Zhou, M.C. Modular Design of Urban Traffic-Light Control Systems Based on Synchronized Timed Petri Nets. IEEE Trans. Intell. Trans. Syst. 2014, 5, 530–539. [Google Scholar]
- Geronimi, S.; Abadie, V.; Becker, N. Methodology to Assess and to Validate the Dependability of an Advanced Driver Assistance System (ADAS) Such as Automatic Emergency Braking System (AEBS); Springer International Publishing: New York, NY, USA, 2016. [Google Scholar]
- Fancher, P.; Bareket, Z.; Ervin, R. Human-centered design of an Acc-with-braking and forward-crash-warning system. Veh. Syst. Dyn. 2001, 36, 203–223. [Google Scholar]
- Edwards, M.; Nathanson, A.; Carroll, J.; Wisch, M.; Zander, O.; Lubbe, N. Assessment of Integrated Pedestrian Protection Systems with Autonomous Emergency Braking (AEB) and Passive Safety Components. Traffic Inj. Prev. 2015, 16 (Suppl. 1), S2–S11. [Google Scholar] [PubMed]
- Buenoa, M.; Fabrigoule, C.; Ndiaye, D.; Fort, A. Behavioral Adaptation and Effectiveness of a Forward Collision Warning System Depending on a Secondary Cognitive Task; Transportation Research Part F: Traffic Psychology and Behavior; Elsevier: Amsterdam, The Netherlands, 2014; Volume 24, pp. 158–168. [Google Scholar]
- Althoff, M.; Dolan, J.M. Online Verification of Automated Road Vehicles Using Reachability Analysis. IEEE Trans. Robot. 2014, 30, 903–918. [Google Scholar]
- Kusano, K.D.; Gabler, H.C. Safety benefits of forward collision warning, brake assist, and autonomous braking systems in rear-end collisions. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1546–1555. [Google Scholar]
- Kim, T.; Lee, J.; Yi, K. Enhanced maximum tire-road friction coefficient estimation based advanced emergency braking algorithm. In Proceedings of the 2015 IEEE in Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015. [Google Scholar]
- Lee, D.; Kim, B.; Yi, K. Development of an Integrated Driving Path Estimation Algorithm for ACC and AEBS. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1030–1036. [Google Scholar]
- Doecke, S.D.; Anderson, R.W.; Mackenzie, J.R. The potential of autonomous emergency braking systems to mitigate passenger vehicle crashes. In Proceedings of the Australasian Road Safety Research, Policing and Education Conference, Wellington, New Zealand, 4–6 October 2012. [Google Scholar]
- Guo, L.; Ren, Z.; Ge, P. Advanced Emergency Braking Controller Design for Pedestrian Protection Oriented Automotive Collision Avoidance System. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef]
- Lee, T.; Yi, K.; Kim, J.; Lee, J. Development and Evaluations of Advanced Emergency Braking System Algorithm for the Commercial Vehicle. In Proceedings of the 22nd International Technical Conference on the Enhanced Safety of Vehicles (ESV), Washington, DC, USA, 13–16 June 2011. [Google Scholar]
- Zhang, R.; He, Z.C.; Wang, H.W.; You, F.; Li, K.N. Study on Self-Tuning Tyre Friction Control for Developing Main-Servo Loop Integrated Chassis Control System. IEEE Access 2017. [Google Scholar] [CrossRef]
- Tan, C.P.; Yu, X.H.; Man, Z.H. Terminal sliding mode observers for a class of nonlinear systems. Automatica 2010, 46, 1401–1404. [Google Scholar]
- Huang, R.; Liang, H.; Zhao, P.; Yu, B.; Geng, X. Intent-Estimation-and Motion-Model-Based Collision Avoidance Method for Autonomous Vehicles in Urban Environments. Appl. Sci. 2017, 7, 457. [Google Scholar]





















© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Li, K.; He, Z.; Wang, H.; You, F. Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles. Appl. Sci. 2017, 7, 504. https://doi.org/10.3390/app7050504
Zhang R, Li K, He Z, Wang H, You F. Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles. Applied Sciences. 2017; 7(5):504. https://doi.org/10.3390/app7050504
Chicago/Turabian StyleZhang, Ronghui, Kening Li, Zhaocheng He, Haiwei Wang, and Feng You. 2017. "Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles" Applied Sciences 7, no. 5: 504. https://doi.org/10.3390/app7050504
APA StyleZhang, R., Li, K., He, Z., Wang, H., & You, F. (2017). Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles. Applied Sciences, 7(5), 504. https://doi.org/10.3390/app7050504