Design, Analysis and Fabrication of a Novel Transverse Flux Permanent Magnet Machine with Disk Rotor

Abstract
:1. Introduction
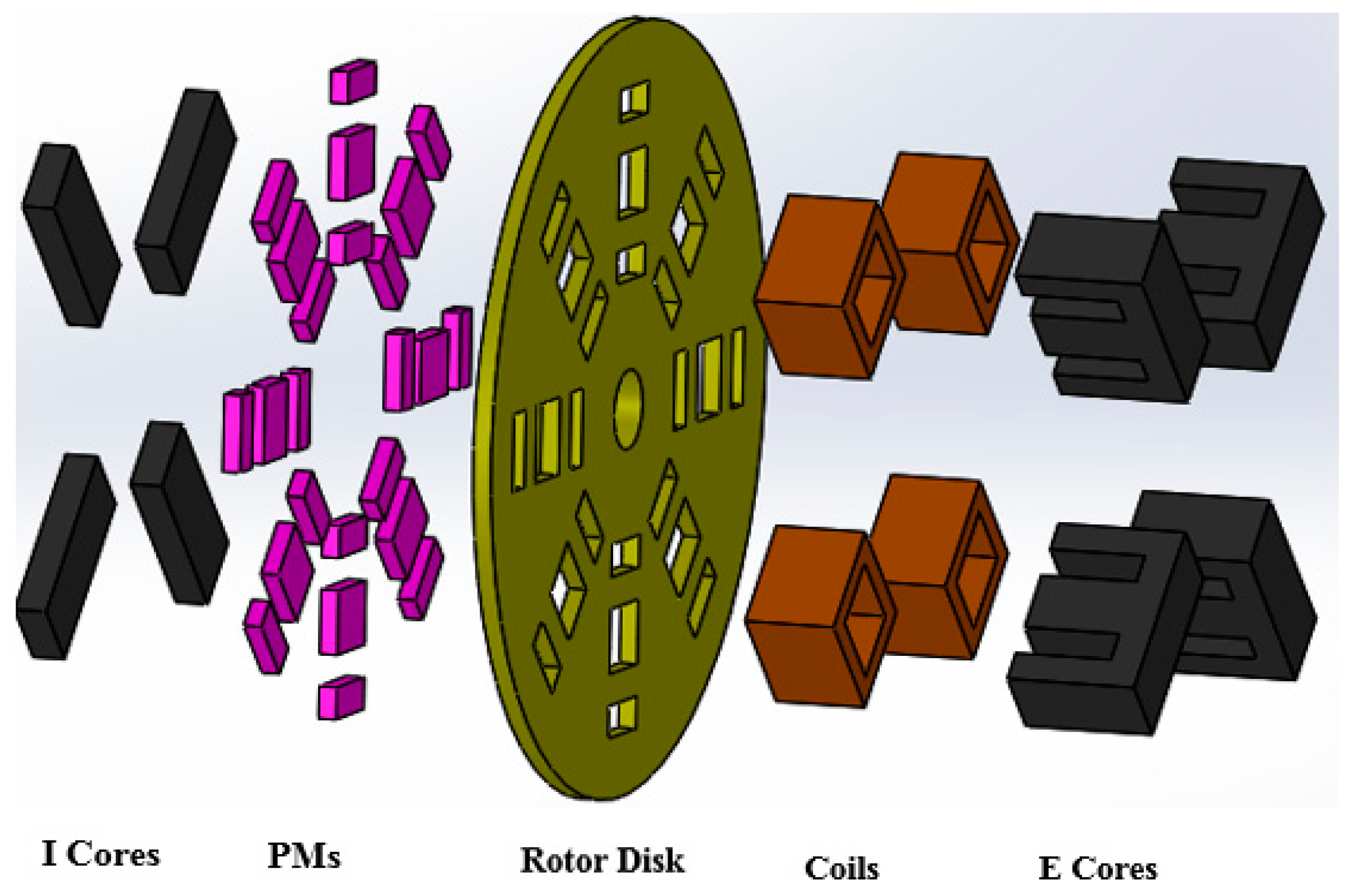
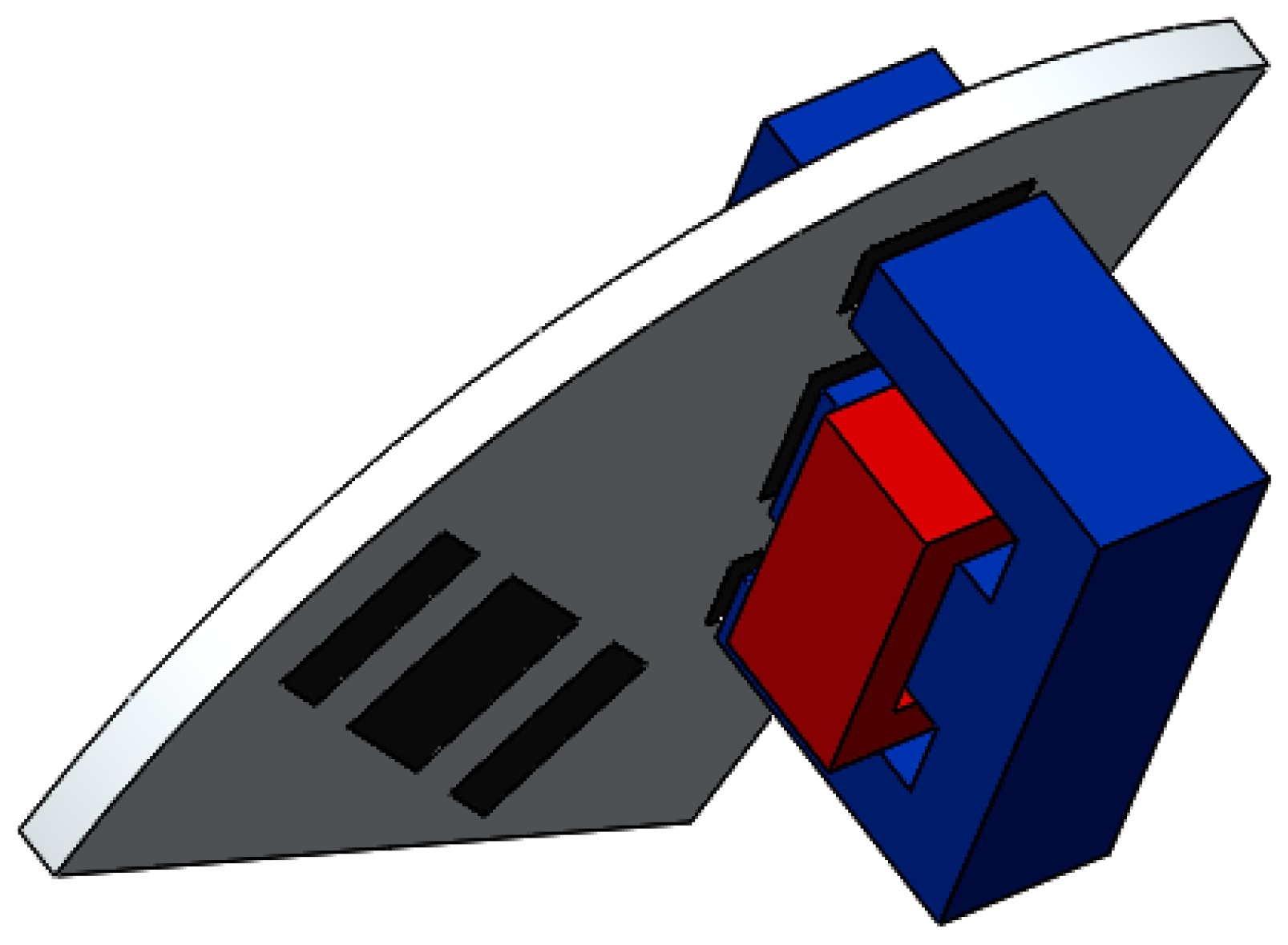
2. The Proposed Structure
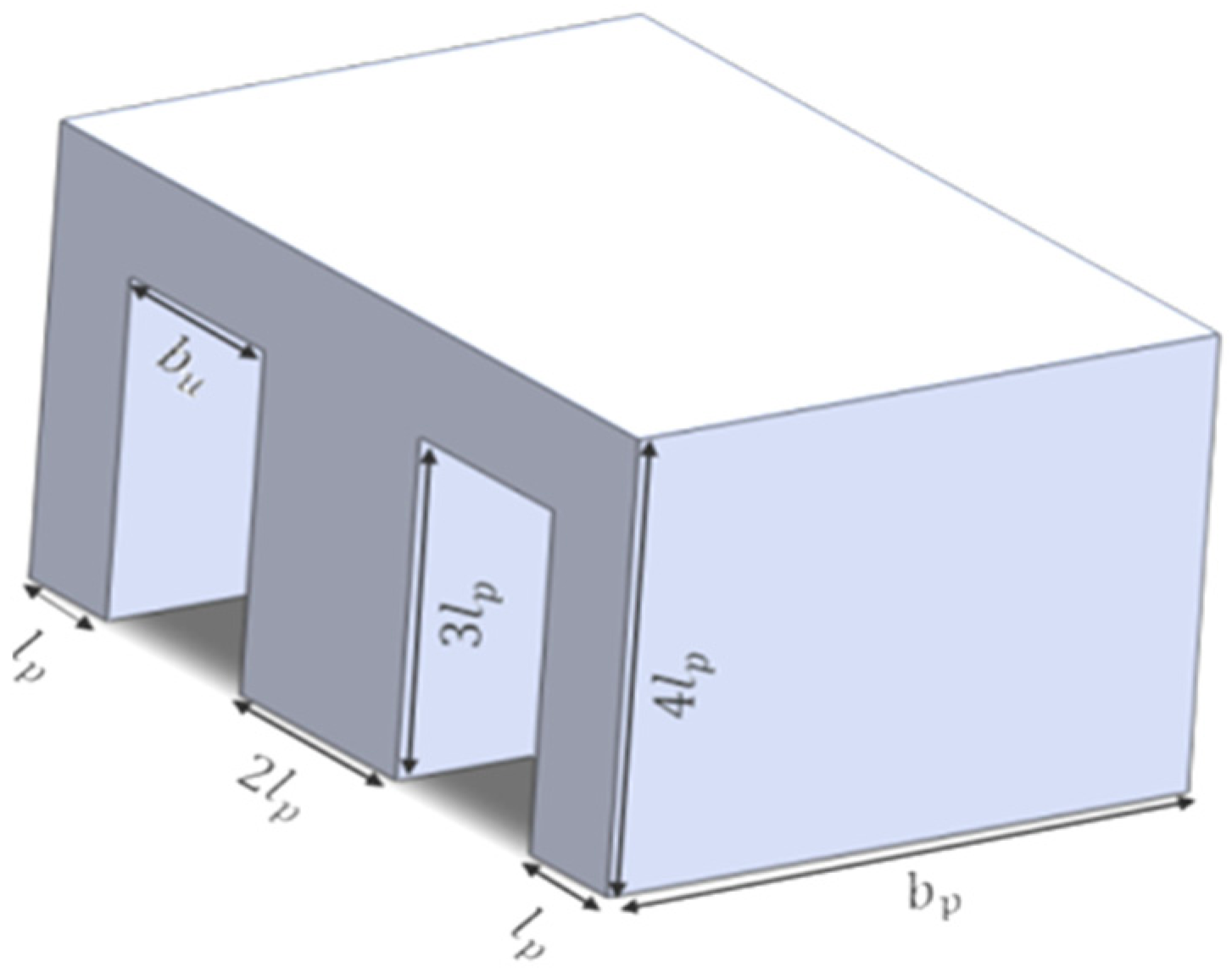
2.1. E-Shaped Core
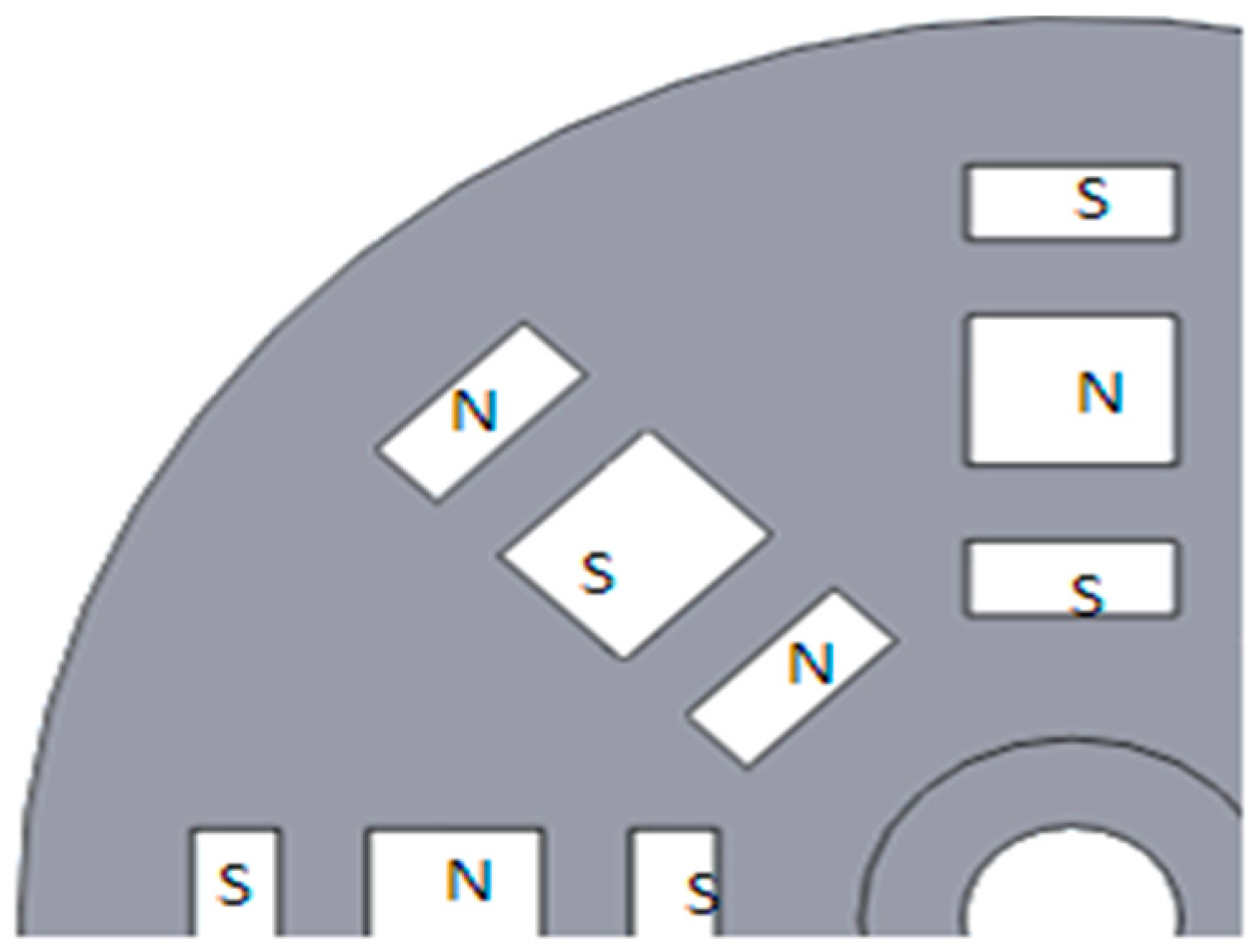
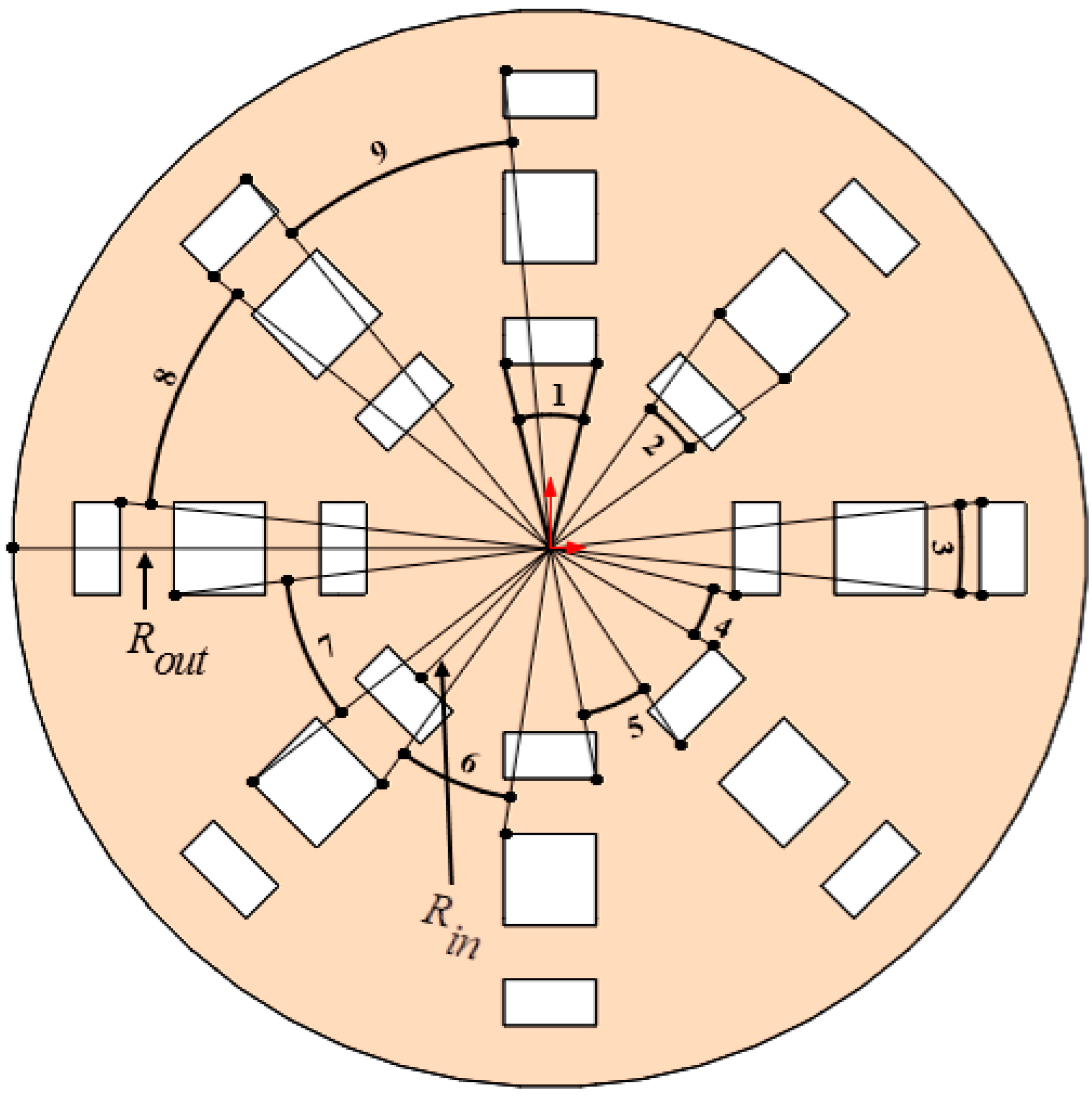
2.2. Rotor Disk Cross-Sectional View
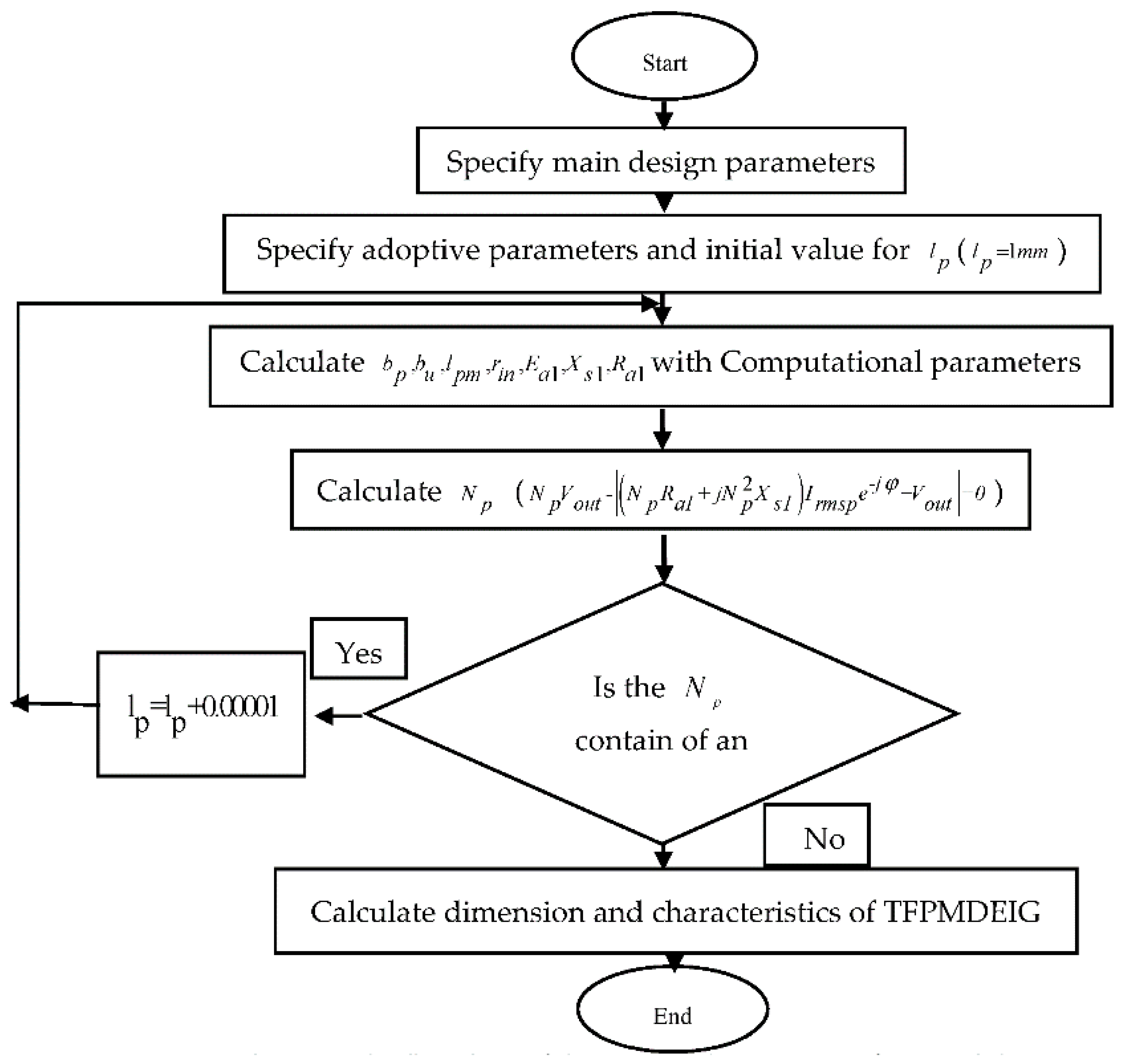
3. The Algorithm of the Initial Design
3.1. Main Design Parameters
3.2. Adoptive Parameters
3.3. Computational Parameters
3.3.1. Computing the Thickness of the Permanent Magnet
3.3.2. Computation of RMS (Root Mean Square) Current of Each Pole of the Machine
3.3.3. Computation of Fundamental Component Amplitude of the Induced Voltage in Each Winding Turn for the Proposed Design
- (A).
- The first position: the entire surface of the magnet across the E-shaped core ( flux)
- (B).
- The second position: a rotor displacement of compared to the first position ( flux)
- (C).
- The third position: a rotor displacement of compared to the first position ( flux)
- (D).
- The fourth position: a rotor displacement of compared to the first position ( flux).
- (E).
- The fifth position: a rotor displacement of compared to the first position ( flux)
3.3.4. Presenting the Output Equation for the Proposed Design
3.3.5. Computation of Synchronous Reluctance in Each Winding Turn (Initial Synchronous Reluctance)
3.3.6. Computing Wire Diameter and the Resistance in Each Winding Turn (the Initial Resistance) of the Winding
3.3.7. Computing Final No Load Voltage of the Generator
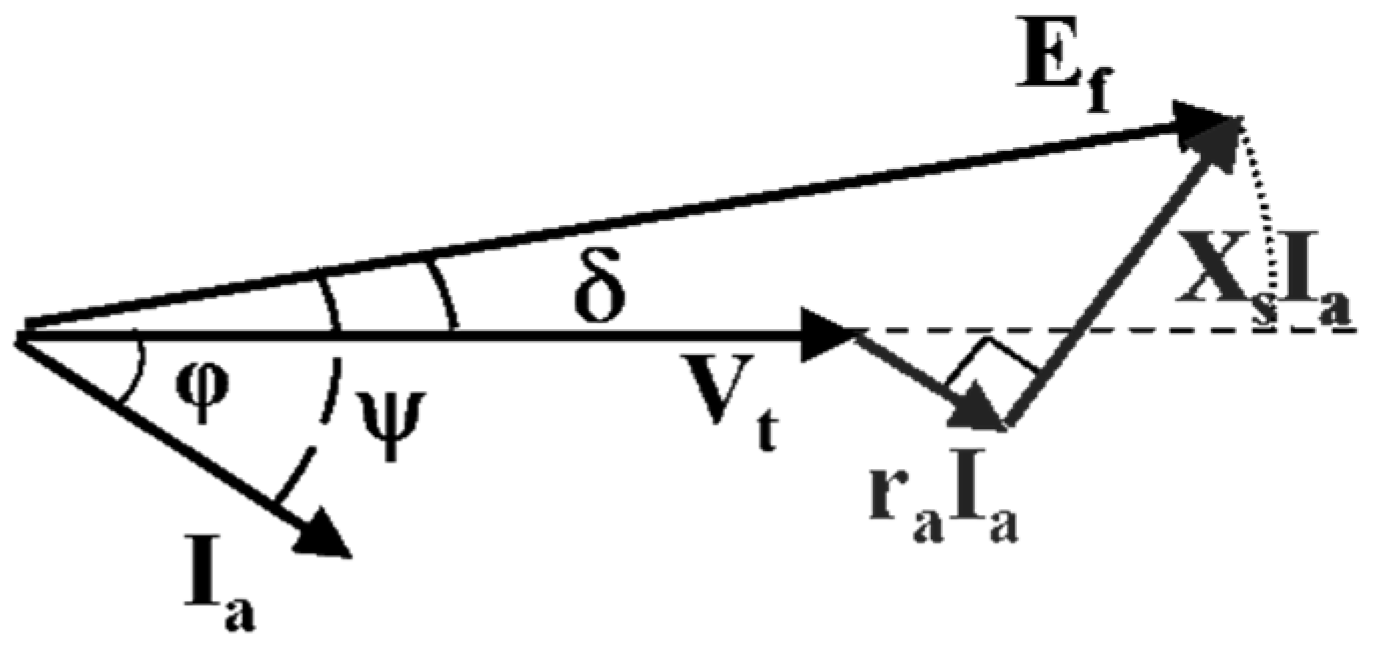
3.3.8. Computation of Machine’s Power Angle () in Full Load Mode
4. Finite-Element Analysis (FEA)
- (1)
- The low frequency and the rotor’s low rotation speed,
- (2)
- The severe difficulties with acquiring SMC cores in a small quantity.
5. Simulation Results
5.1. Static Analysis
5.2. Dynamic Analysis
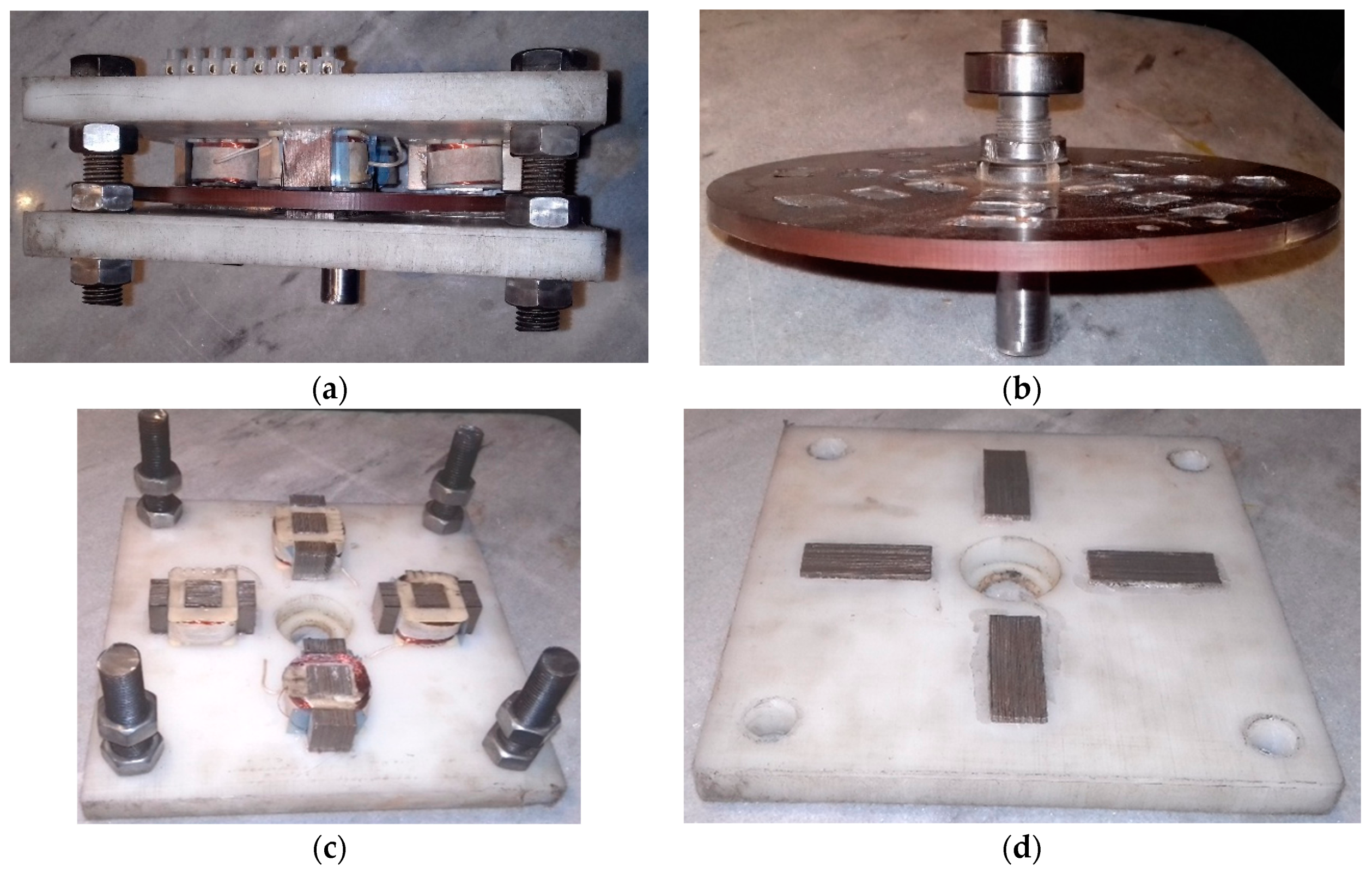
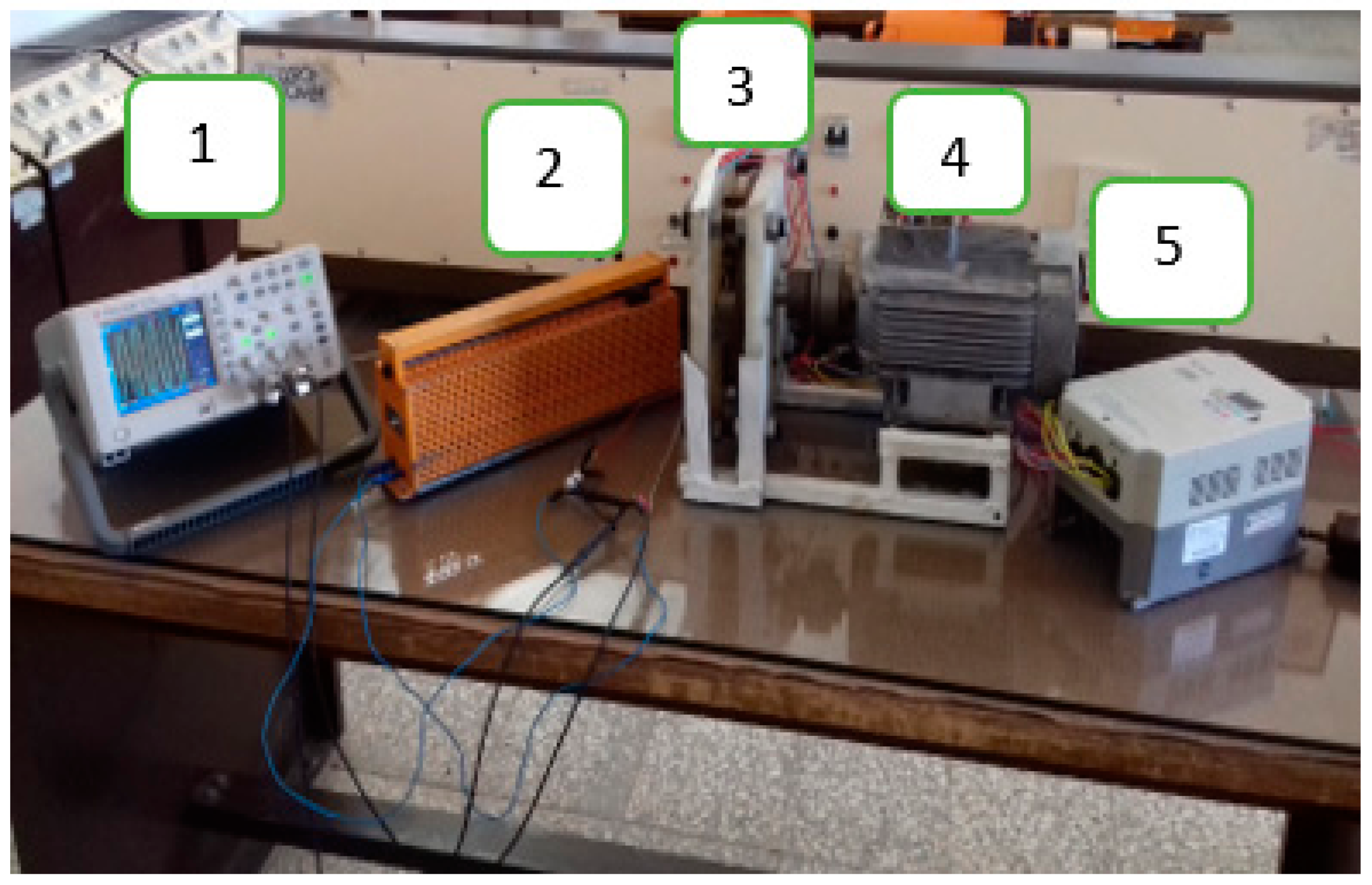
6. Prototyping and Testing of the Designed TFPMDEIG
- 1-
- Rotor disk: The rotor disk is made of paper sheet with phenolic resin (Figure 15b). Permanent magnets have been fixed by glue on it.
- 2-
- The stator body: the stator body is made of compact plastic with a thickness of 25 mm. The stator body holds the stator cores (E and I core) (Figure 15c,d). The location of the stator core is carved by CNC (computer numerical control) milling machine.
- 3-
- E and I-shaped cores: E and I-shaped cores are made of silicon steel. In order to reduce core losses, E and I-shaped cores are laminated.
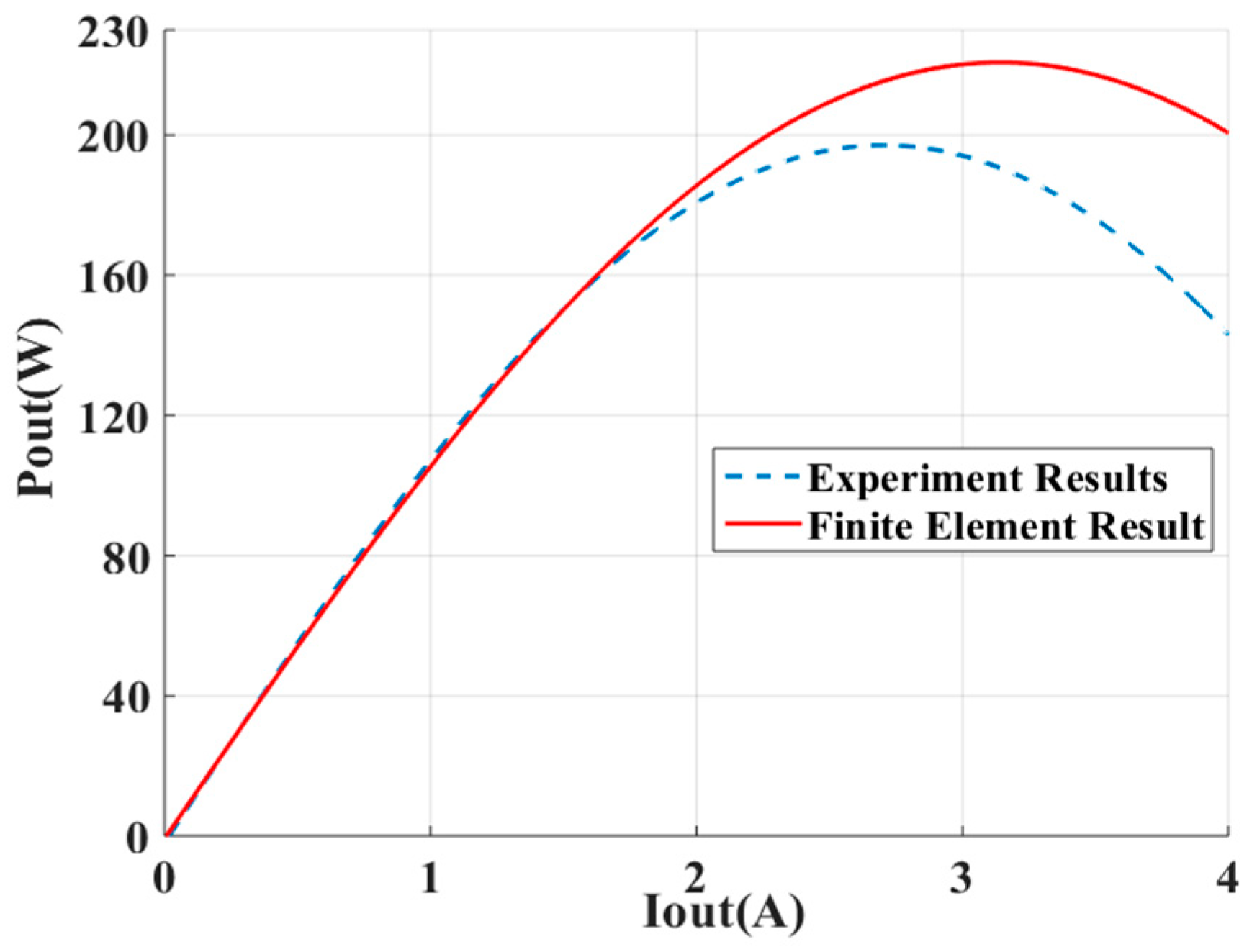
7. More Results and Discussion
8. Conclusions
Author Contributions
Conflicts of Interest
References
- Jia, Z.; Lin, H.; Fang, S.; Huang, Y. A novel transverse flux permanent magnet generator with double C-hoop stator and flux-concentrated rotor. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Lei, G.; Liu, C.; Guo, Y.; Zhu, J. Multidisciplinary design analysis and optimization of a PM transverse flux machine with soft magnetic composite core. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Kremers, M.F.; Paulides, J.J.; Lomonova, E.A. Toward accurate design of a transverse flux machine using an analytical 3-d magnetic charge model. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Dobzhanskyi, O.; Mendrela, E.E. Performance of a 3-phase permanent magnet transverse flux wind power generator with internal stator. In Proceedings of the 2011 IEEE Green Technologies Conference (IEEE-Green), Baton Rouge, LA, USA, 14–15 April 2011; pp. 1–5. [Google Scholar]
- Watanabe, R.; Shin, J.-S.; Koseki, T.; Kim, H.-J. Optimal design for high output power of transverse-flux-type cylindrical linear synchronous generator. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Arshad, W.M.; Thelin, P.; Backstrom, T.; Sadarangani, C. Use of transverse-flux machines in a free-piston generator. IEEE Trans. Ind. Appl. 2004, 40, 1092–1100. [Google Scholar] [CrossRef]
- Schmidt, E. 3-D finite element analysis of the cogging torque of a transverse flux machine. IEEE Trans. Magn. 2005, 41, 1836–1839. [Google Scholar] [CrossRef]
- Washington, J.G.; Atkinson, G.J.; Baker, N.J. Reduction of cogging torque and EMF harmonics in modulated pole machines. IEEE Trans. Energy Convers. 2016, 31, 759–768. [Google Scholar] [CrossRef]
- Washington, J.G.; Atkinson, G.J.; Baker, N.J.; Jack, A.G.; Mecrow, B.C.; Jensen, B.B.; Pennander, L.-O.; Nord, G.L.; Sjöberg, L. Three-phase modulated pole machine topologies utilizing mutual flux paths. IEEE Trans. Energy Convers. 2012, 27, 507–515. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Kou, B.; Zhao, W.; Yang, G. Design and analysis of a bidirectional cross-linking transverse flux permanent magnet synchronous motor. In Proceedings of the 2014 17th International Symposium on Electromagnetic Launch Technology, La Jolla, CA, USA, 7–11 July 2014; pp. 1–6. [Google Scholar]
- Doering, J.; Steinborn, G.; Hofmann, W. Torque, Power, Losses, and Heat Calculation of a Transverse Flux Reluctance Machine With Soft Magnetic Composite Materials and Disk-Shaped Rotor. IEEE Trans. Ind. Appl. 2015, 51, 1494–1504. [Google Scholar] [CrossRef]
- Liu, C.; Zhu, J.; Wang, Y.; Lei, G.; Guo, Y. Design considerations of PM transverse flux machines with soft magnetic composite cores. IEEE Trans. Appl. Superconduct. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Dobzhanskyi, O.; Gouws, R.; Amiri, E. On the role of magnetic shunts for increasing performance of transverse flux machines. IEEE Trans. Magn. 2016, 53, 1–8. [Google Scholar] [CrossRef]
- Henneberger, G.; Bork, M. Development of a new transverse flux motor. In Proceedings of the IEE Colloquium on New Topologies for Permanent Magnet Machines (Digest No: 1997/090), London, UK, 18 June 1997; pp. 1–6. [Google Scholar]
- Crider, J.M.; Sudhoff, S.D. An Inner Rotor Flux-Modulated Permanent Magnet Synchronous Machine for Low-Speed High-Torque Applications. IEEE Trans. Energy Convers. 2015, 30, 1247–1254. [Google Scholar] [CrossRef]
- Harris, M.R.; Pajooman, G.H.; Sharkh, S.M.A. The problem of power factor in VRPM (transverse-flux) machines. In Proceedings of the 1997 Eighth International Conference on Electrical Machines and Drives (Conf. Publ. No. 444), Cambridge, UK, 1–3 September 1997; pp. 386–390. [Google Scholar]
- Dobzhanskyi, O.; Gouws, R. Performance analysis of a permanent magnet transverse flux generator with double coil. IEEE Trans. Magn. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Viorel, I.-A.; Strete, L.; Hameyer, K. Construction and design of a modular permanent magnet transverse flux generator. Adv. Electr. Comput. Eng. 2010, 10, 3–6. [Google Scholar] [CrossRef]
- Mitcham, A. Transverse flux motors for electric propulsion of ships. In Proceedings of the IEE Colloquium on New Topologies for Permanent Magnet Machines (Digest No: 1997/090), London, UK, 18 June 1997; pp. 1–6. [Google Scholar]
- Lu, K.; Rasmussen, P.O.; Ritchie, E. Design Considerations of Permanent Magnet Transverse Flux Machines. IEEE Trans. Magn. 2011, 47, 2804–2807. [Google Scholar] [CrossRef]
- Masmoudi, A.; Njeh, A.; Mansouri, A.; Trabelsi, H.; Elantably, A. Optimizing the overlap between the stator teeth of a claw pole transverse-flux permanent-magnet Machine. IEEE Trans. Magn. 2004, 40, 1573–1578. [Google Scholar] [CrossRef]
- Liu, C.; Lei, G.; Wang, T.; Guo, Y.; Wang, Y.; Zhu, J. Comparative Study of Small Electrical Machines with Soft Magnetic Composite Cores. IEEE Trans. Ind. Electr. 2017, 64, 1049–1060. [Google Scholar] [CrossRef]
- Zhu, J.G.; Guo, Y.G.; Lin, Z.W.; Li, Y.J.; Huang, Y.K. Development of PM transverse flux motors with soft magnetic composite cores. IEEE Trans. Magn. 2011, 47, 4376–4383. [Google Scholar] [CrossRef]
- Liu, C.; Lei, G.; Ma, B.; Wang, Y.; Guo, Y.; Zhu, J. Development of a New Low Cost 3-D Flux Transverse Flux FSPMM with Soft Magnetic Composite Cores and Ferrite Magnets. IEEE Trans. Magn. 2017, 47, 1. [Google Scholar] [CrossRef]
- Yang, X.; Kou, B.; Luo, J.; Zhou, Y.; Xing, F. Torque Characteristic Analysis of a Transverse Flux Motor Using a Combined-Type Stator Core. Appl. Sci. 2016, 6, 342. [Google Scholar] [CrossRef]
- Hosseini, S.; Moghani, J.S.; Ershad, N.F.; Jensen, B.B. Design, prototyping, and analysis of a novel modular permanent-magnet transverse flux disk generator. IEEE Trans. Magn. 2011, 47, 772–780. [Google Scholar] [CrossRef] [Green Version]
- Gieras, J.F. Performance characteristics of a transverse flux generator. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 1293–1299. [Google Scholar]
- Cullity, B.D.; Graham, C.D. Introduction to Magnetic Materials; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Mahmoudi, A.; Kahourzade, S.; Rahim, N.A.; Hew, W.P. Design, analysis, and prototyping of an axial-flux permanent magnet motor based on genetic algorithm and finite-element analysis. IEEE Trans. Magn. 2013, 49, 1479–1492. [Google Scholar] [CrossRef]
- Bianchi, N. Electrical Machine Analysis Using Finite Elements; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| sign |
| Definition | Parameter | Value |
|---|---|---|
| Rated speed | 750 | |
| Rated Power | 200 | |
| Number of Phases | 1 | |
| Frequency | 50 | |
| Load Power Factor | 1 | |
| Rated Voltage (RMS (Root Mean Square)) | 70 | |
| Number of Poles | 8 |
| Row | Definition | Parameter | Value |
|---|---|---|---|
| 1 | Coefficient current waveform | 1.414 | |
| 2 | Coefficient power waveform | ||
| 3 | Magnetic relative permeability of vacuum | ||
| 4 | Magnetic relative permeability of E and I cores | 300 | |
| 5 | Magnetic relative permeability of permanent magnet | 1.0517 | |
| 6 | Ratio of to | 2.2727 | |
| 7 | Flux leakage coefficient in the air gap length | 1.15 | |
| 8 | Ratio of distance between the center and side arm core of E-shaped () and the total length of the air gap lengths and the thickness of the permanent magnet () | 1 | |
| 9 | The average of flux density in air gap length | 0.8 | |
| 10 | Air gap length | 2 | |
| 11 | Residual flux density of the permanent magnet | 1.32 | |
| 12 | Coercive force | 923000 | |
| 13 | Copper resistivity | ||
| 14 | Current density | 9 |
| Row | Definition | Parameter | Value |
|---|---|---|---|
| 1 | Inner radius of the rotor disk | 40.1 | |
| 2 | Outer radius of the rotor disk | 120 | |
| 3 | Thickness of permanent magnet | 7 | |
| 4 | Size of the core of E-shaped side arm | 11 | |
| 5 | Thickness of E-shaped core | 25 | |
| 6 | The length between the middle and the side arm of E-shaped core | 11 | |
| 7 | Turns of winding | 1450 | |
| 8 | Main harmonic of induced voltage | 115.28 | |
| 9 | Resistance | 46.54 | |
| 10 | Synchronous Reactance | 50.03 | |
| 11 | Power angle | 19.84 |
| Generator Parts | Material |
|---|---|
| E and I cores | Laminated steel with permeability coefficient 300 |
| Rotor Core | Paper sheet with phenolic resin |
| Permanent Magnet | NeFeBr 45 |
| Winding | Copper |
| Definition | Parameter | Initial Algorithm Results | 3D-FEA Results | Experimental Results |
|---|---|---|---|---|
| No load voltage (Amplitude) | 171.35 | 169.36 | 164.78 | |
| Main harmonic no load voltage (Amplitude) | 163.03 | 161.77 | 158.42 | |
| Output voltage (Amplitude) for full load | 101.23 | 105.32 | 98.30 | |
| Main harmonic full load voltage (Amplitude) | 98.99 | 102.05 | 96.19 | |
| Full load current (Amplitude) | 4.49 | 4.46 | 4.26 | |
| Main harmonic full load current (Amplitude) | 4.68 | 4.60 | 4.31 | |
| THD * of no load voltage | THD | 28.12% | 30.99% | 29.06% |
| THD output voltage in full load condition | THD | 24.52% | 25.54% | 15.49% |
| THD output current in full load condition | THD | 24.52% | 25.42% | 15.19% |
| Armature Resistance | 11.63 | - | 11.8 | |
| Synchronous Reactance | 12.51 | 13.63 | 14.11 | |
| No load voltage (Effective value) | 115.28 | 114.02 | 112.01 | |
| Output voltage (Effective value) for full load | 70 | 72.12 | 68.02 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azarinfar, H.; Aghaebrahimi, M.R. Design, Analysis and Fabrication of a Novel Transverse Flux Permanent Magnet Machine with Disk Rotor. Appl. Sci. 2017, 7, 860. https://doi.org/10.3390/app7080860
Azarinfar H, Aghaebrahimi MR. Design, Analysis and Fabrication of a Novel Transverse Flux Permanent Magnet Machine with Disk Rotor. Applied Sciences. 2017; 7(8):860. https://doi.org/10.3390/app7080860
Chicago/Turabian StyleAzarinfar, Hosein, and Mohammad R Aghaebrahimi. 2017. "Design, Analysis and Fabrication of a Novel Transverse Flux Permanent Magnet Machine with Disk Rotor" Applied Sciences 7, no. 8: 860. https://doi.org/10.3390/app7080860
APA StyleAzarinfar, H., & Aghaebrahimi, M. R. (2017). Design, Analysis and Fabrication of a Novel Transverse Flux Permanent Magnet Machine with Disk Rotor. Applied Sciences, 7(8), 860. https://doi.org/10.3390/app7080860