Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Plant Description
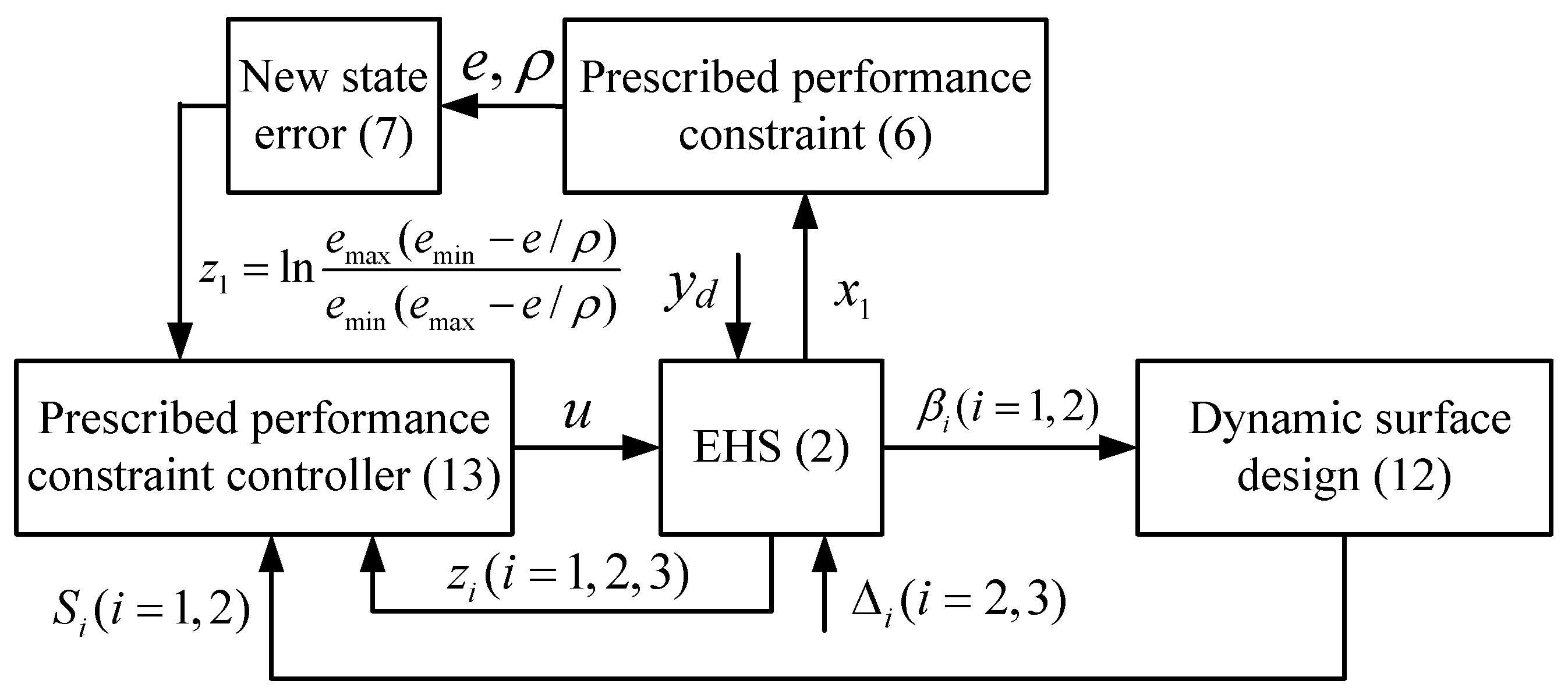
3. Prescribed Performance Constraint Control of EHS
3.1. Prescribed Performance Constraint
- (1)
- is positive and monotonically decreasing;
- (2)
- ;
- (3)
- .
3.2. Controller Design Based on PPC
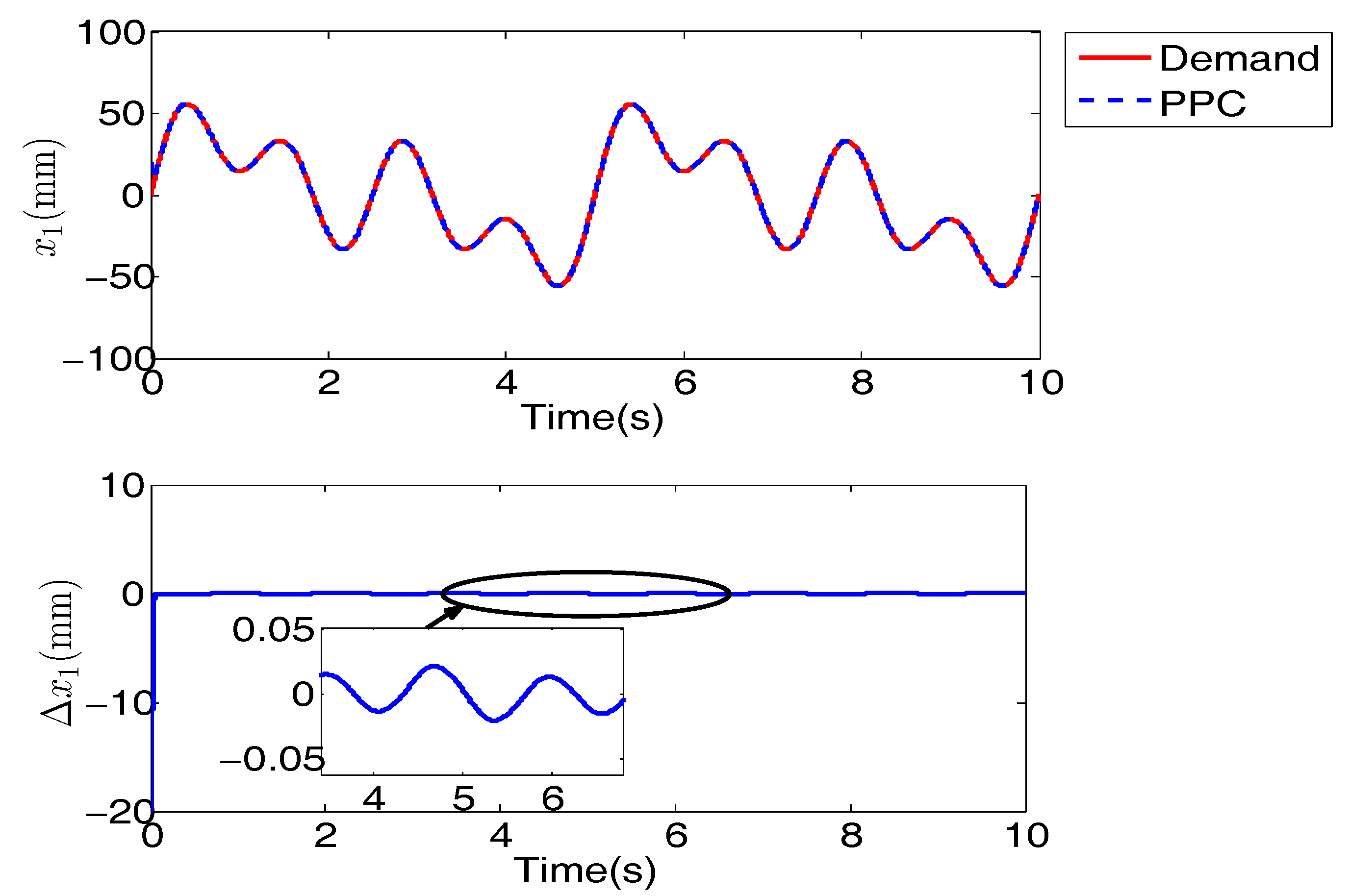
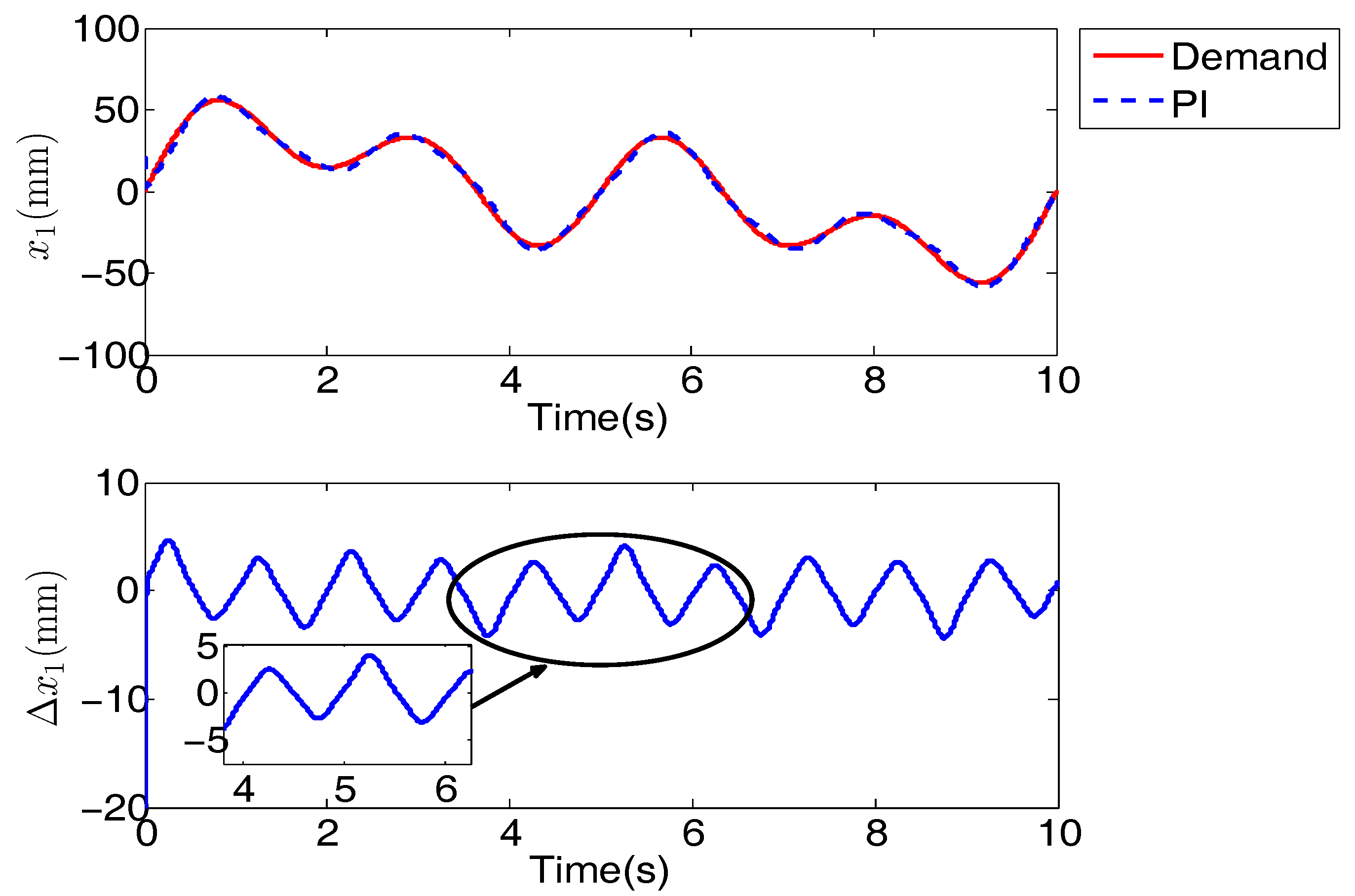
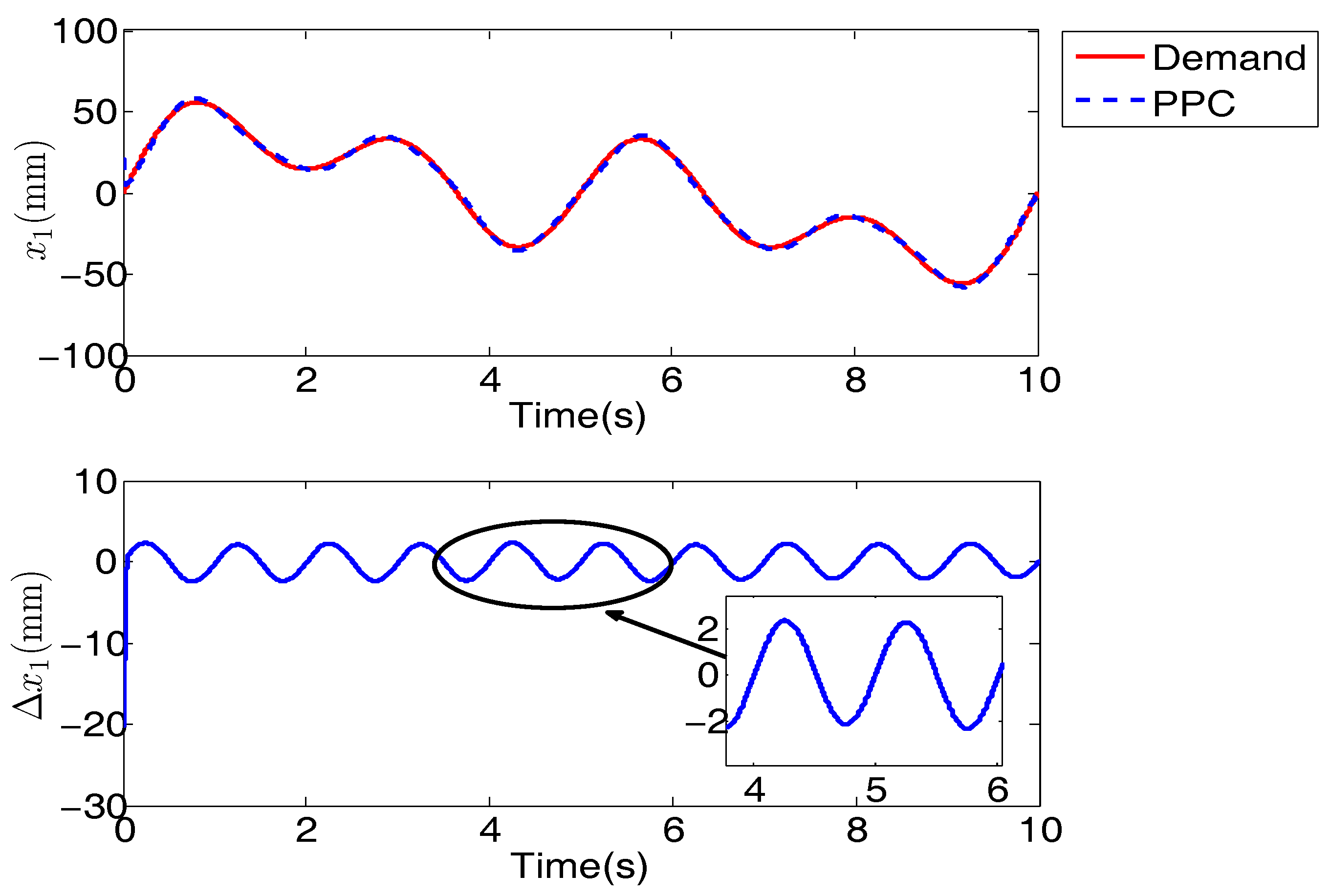
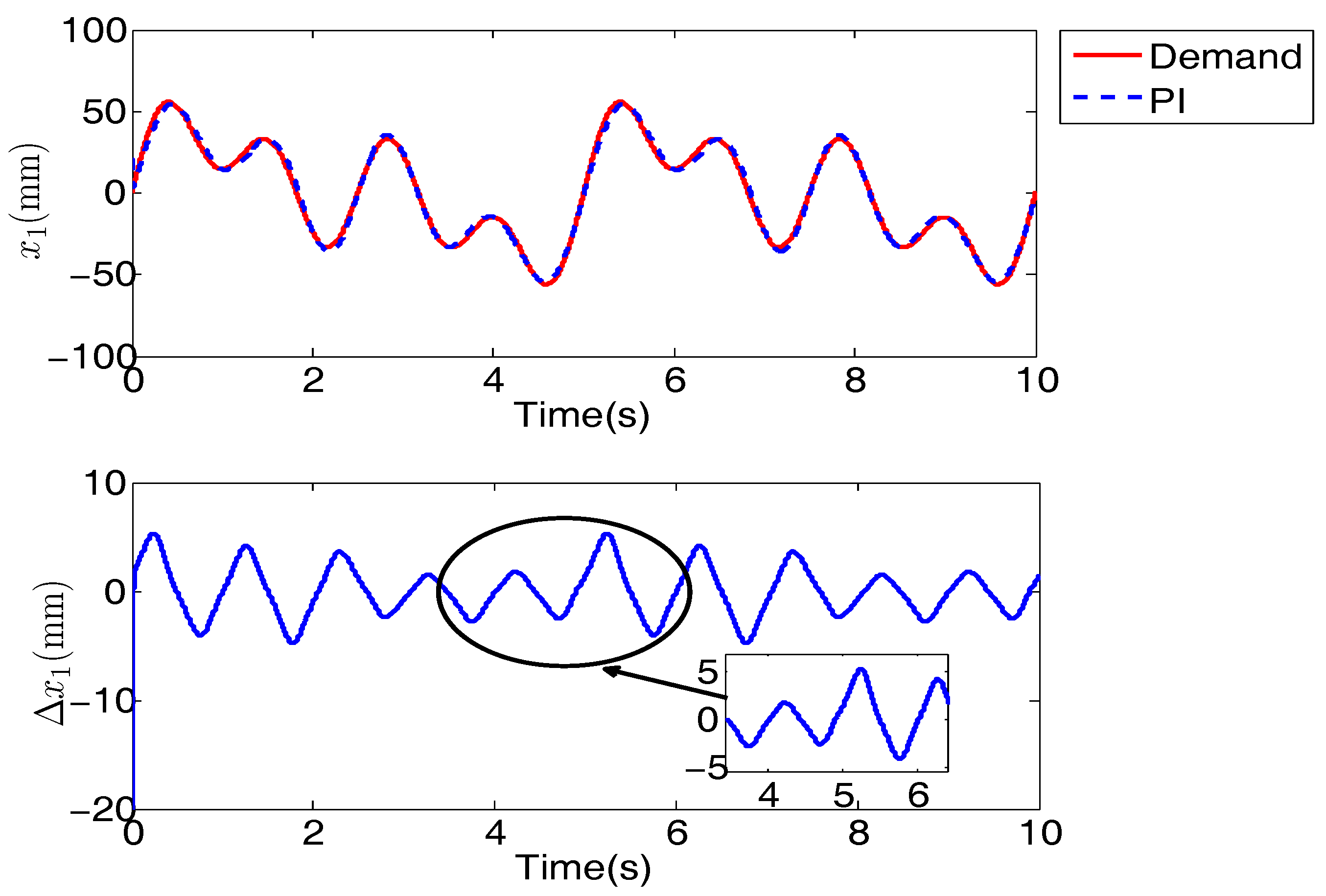
4. Comparison Results
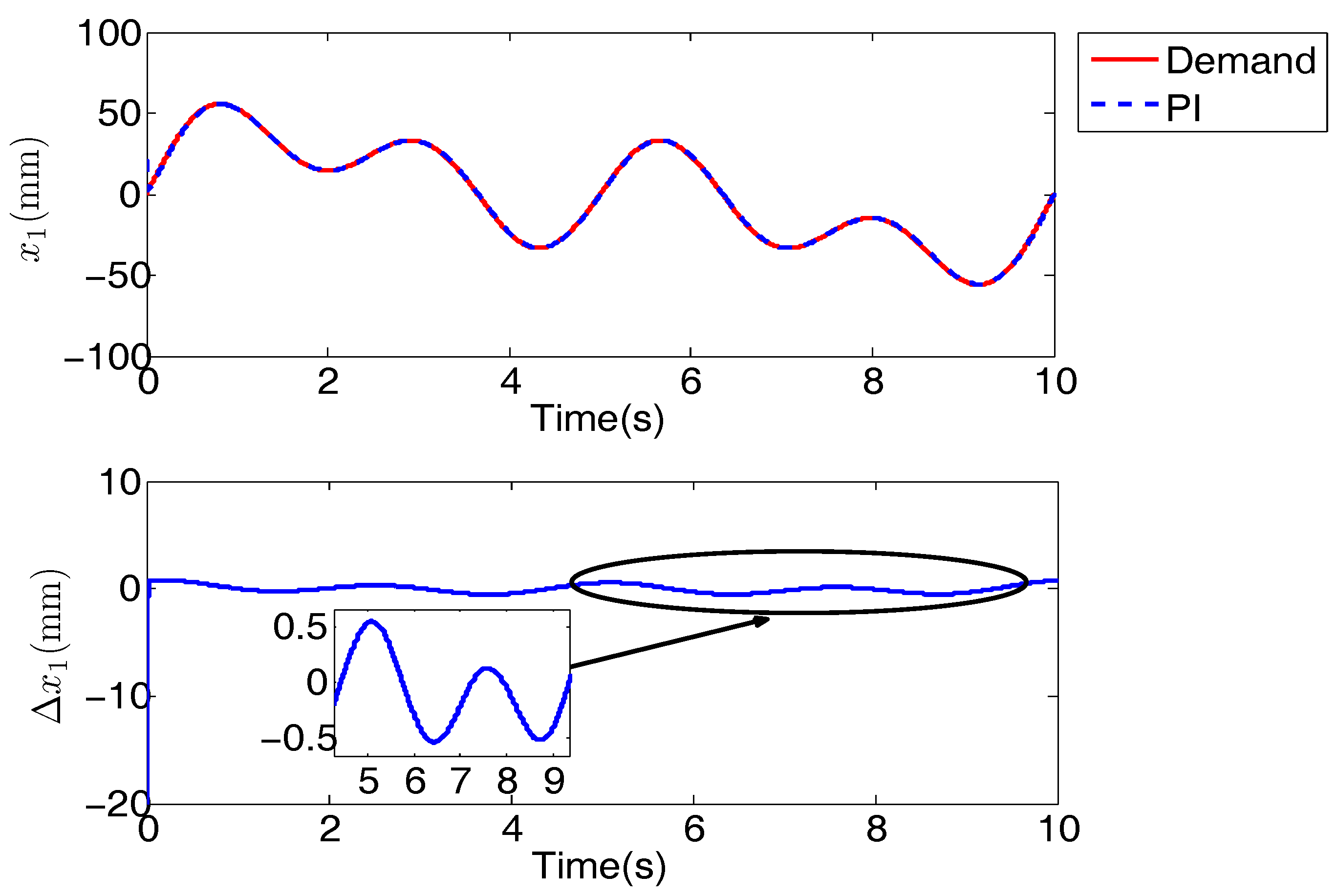
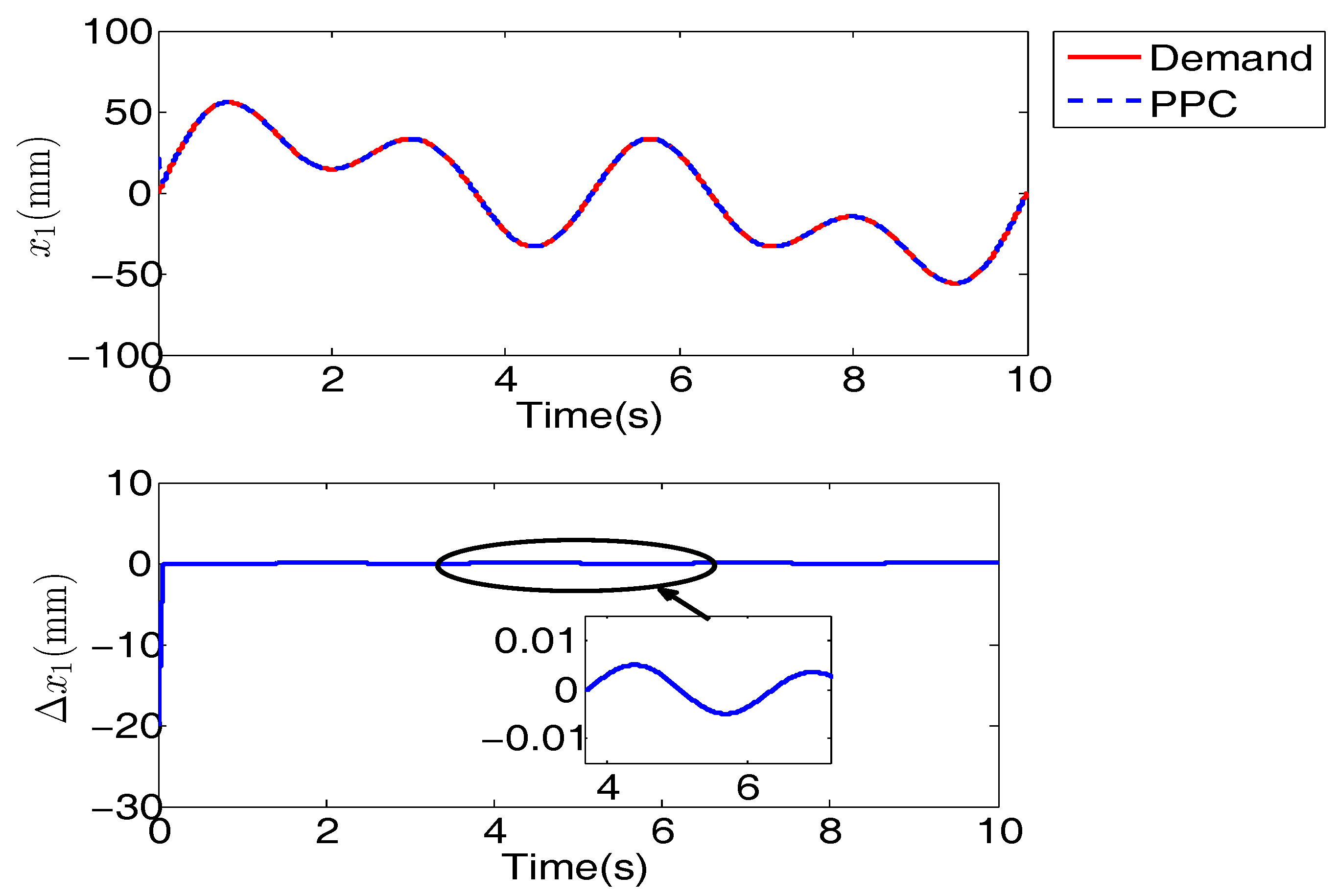
4.1. Compared Results with Nominal Hydraulic Parameters
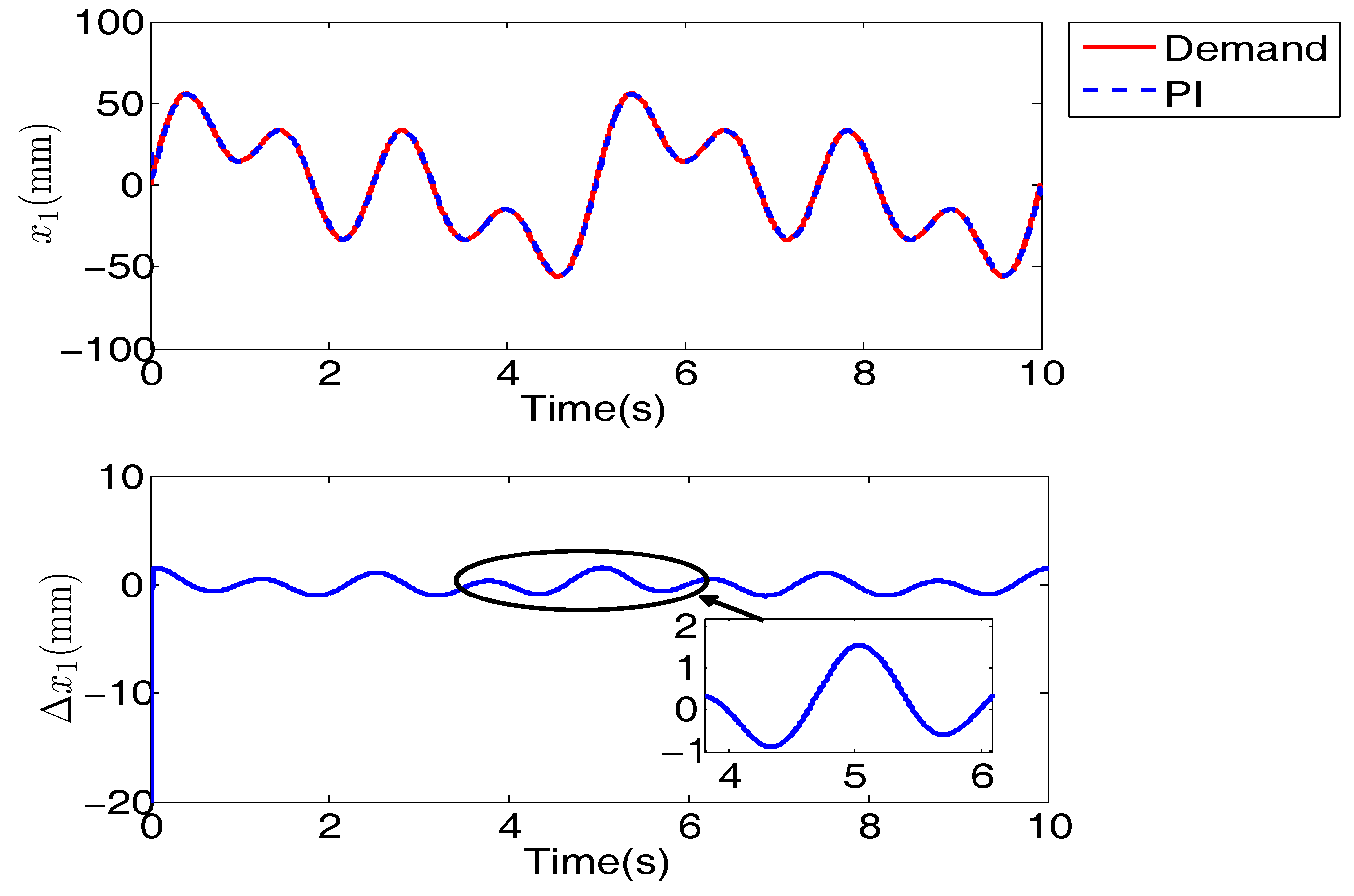
4.2. Compared Results with Uncertain Nonlinearities
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Notation
| EHS | Electro-hydraulic system |
| BLF | Barrier Lyapunov function |
| PPC | Prescribed performance constraint |
| (m/V) | Gain of the servo valve |
| u (V) | control voltage of the servo valve |
| (–) | Discharge coefficient |
| w (m) | Area gradient of the servo valve |
| , (Pa) | Supply pressure and return pressure |
| (Pa) | Cylinder load pressure |
| (mm) | Maximal spool position of the servo valve |
| (kg/m) | Density of hydraulic oil |
| (m/(s·Pa)) | Coefficient of the total leakage of the cylinder |
| (bar) | Effective bulk modulus |
| (m) | Annulus area of the cylinder chamber |
| (m) | Half-volume of the cylinder |
| m (kg) | Load mass |
| b (Ns/m) | Viscous damping coefficient of hydraulic oil |
| K (N/m) | Load spring constant |
| (N) | External load of the electro-hydraulic system |
| (m/s), (m) | Desired and actual velocities of the cylinder |
| (–) | Parametric uncertainty of discharge coefficient |
| (bar) | Parametric uncertainty of effective bulk modulus |
| (kg/m) | Parametric uncertainty of density of hydraulic oil |
| (m/(s·Pa)) | Parametric uncertainty of coefficient of the total leakage of the cylinder |
| (Ns/m) | Parametric uncertainty of viscous damping coefficient of hydraulic oil |
| (N/m) | Parametric uncertainty of load spring constant |
References
- Fales, R.; Kelkar, A. Robust control design for a wheel loader using H∞ and feedback linearization based methods. ISA Trans. 2009, 48, 313–320. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Wang, J.; Wang, S. Fractional order control to the electrohydraulic system in insulator fatigue test device. Mechatronics 2013, 23, 828–839. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Shang, Y.; Huang, C. Adaptive nonlinear optimal compensation control for electro-hydraulic load simulator. China J. Aeronaut. 2010, 23, 720–733. [Google Scholar]
- Yang, Y.; Ma, L.; Huang, D. Development and repetitive learning control of lower limb exoskeleton driven by electro-hydraulic actuators. IEEE Trans. Ind. Electron. 2017, 64, 4169–4178. [Google Scholar] [CrossRef]
- Merritt, H. Hydraulic Control Systems; John Wiley & Sons: New York, NY, USA, 1967. [Google Scholar]
- Shen, G.; Zhu, Z.; Zhao, J.; Zhu, W.; Tang, Y.; Li, X. Real-time tracking control of electro-hydraulic force servo systems using offline feedback control and adaptive control. ISA Trans. 2017, 67, 356–370. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Yin, J.; Yu, T.; Jiang, D. Saturated adaptive control of an electrohydraulic actuator with parametric uncertainty and load disturbance. IEEE Trans. Ind. Electron. 2017, 64, 7930–7941. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Cai, M.; Zhang, B.; Zhu, J. Study on the aviation oxygen supply system based on a mechanical ventilation model. Chin. J. Aeronaut. 2017. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, B.; Cai, M.; Zhang, D. Numerical Simulation of volume-controlled mechanical ventilated respiratory system with two different lungs. Int. J. Numer. Methods Biomed. Eng. 2016, 33, 2852. [Google Scholar] [CrossRef] [PubMed]
- Niu, J.; Shi, Y.; Cai, M.; Cao, Z.; Wang, D.; Zhang, Z.; Zhang, D.X. Detection of sputum by interpreting the time-frequency distribution of respiratory sound signal using image processing techniques. Bioinformatics 2017. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.; Shi, Y.; Cai, M.; Xu, W. Influence of secretion on airflow dynamics of mechanical ventilated respiratory system. IEEE/ACM Trans. Comput. Biol. Bioinform. 2017. [Google Scholar] [CrossRef] [PubMed]
- Niu, J.; Shi, Y.; Cao, Z.; Cai, M.; Wei, C.; Jian, Z.; Xu, W. Study on air flow dynamic characteristic of mechanical ventilation of a lung simulator. Sci. China Technol. Sci. 2017, 45, 1–8. [Google Scholar] [CrossRef]
- Ren, S.; Cai, M.; Shi, Y.; Xu, W.; Zhang, X.D. Influence of Bronchial Diameter Change on the airflow dynamics Based on a Pressure-controlled Ventilation System. Int. J. Numer. Methods Biomed. Eng. 2017. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Zhang, B.; Cai, M.; Xu, W. Coupling Effect of Double Lungs on a VCV Ventilator with Automatic Secretion Clearance Function. IEEE/ACM Trans. Comput. Biol. Bioinform. 2017. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Wu, T.; Cai, M.; Wang, Y.; Xu, W. Energy conversion characteristics of a hydropneumatic transformer in a sustainable-energy vehicle. Appl. Energy 2016, 171, 77–85. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Liang, H.; Cai, M. Power characteristics of a new kind of air-powered vehicle. Int. J. Energy Res. 2016, 40, 1112–1121. [Google Scholar] [CrossRef]
- Shi, Y.; Niu, J.; Cao, Z.; Cai, M.; Zhu, J.; Xu, W. Online estimation methodfor respiratory parameters based on a pneumatic model. IEEE/ACM Trans. Comput. Biol. Bioinform. 2016, 13, 939–946. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Meng, C.; Hu, G. Robust consensus tracking of double-integrator dynamics by bounded distributed control. Int. J. Robust Nonliner Control 2016, 26, 1489–1511. [Google Scholar] [CrossRef]
- Zhu, B.; Liu, H.H.T.; Li, Z. Robust distributed attitude synchronization of multiple three-DOF experimental helicopters. Control Eng. Pract. 2015, 36, 87–99. [Google Scholar] [CrossRef]
- Zhang, Y.; Su, S.; Savkin, A.; Celler, B.; Nguyen, H. Multiloop integral controllability analysis for nonlinear multiple-input single-output Processes. Ind. Eng. Chem. Res. 2017, 56, 8054–8065. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Tee, K.P.; Ren, B.; Ge, S.S. Control of nonlinear systems with time varying output constraints. Automatica 2011, 47, 2511–2516. [Google Scholar] [CrossRef]
- He, W.; Chen, Y.; Yin, Z. Adaptive neural network control of an uncertain robot with full-state constraints. IEEE Trans. Cybern. 2016, 46, 620–629. [Google Scholar] [CrossRef] [PubMed]
- He, W.; David, A.O.; Yin, Z.; Sun, C. Neural network control of a robotic manipulator with input deadzone and output constraint. IEEE Trans. Syst. Man Cybern. A Syst. 2016, 46, 759–770. [Google Scholar] [CrossRef]
- He, W.; Huang, H.; Ge, S.S. Adaptive neural network control of a robotic manipulator with time-varying output constraints. IEEE Trans. Cybern. 2017, 47, 3136–3147. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Dong, Y. Adaptive fuzzy neural network control for a constrained robot using impedance learning. IEEE Trans. Neural Netw. Learn. Syst. 2017. [Google Scholar] [CrossRef] [PubMed]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive neural control for output feedback nonlinear systems using a barrier lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems. IEEE Trans. Control Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Qiu, Y.; Liang, X.; Dai, Z. Backstepping dynamic surface control for an anti-skid braking system. Control Eng. Pract. 2015, 42, 140–152. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. State-constrained control of single-rod electrohydraulic actuator with parametric uncertainty and load disturbance. IEEE Trans. Control Syst. Technol. 2017. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica 2015, 45, 532–538. [Google Scholar] [CrossRef]
- Zhang, Z.; Duan, G.; Hou, M. Robust adaptive dynamic surface control of uncertain non-linear systems with output constraints. IET Control Theory Appl. 2017, 11, 110–121. [Google Scholar] [CrossRef]
- Zhang, Z.; Duan, G.; Hou, M. Longitudinal attitude control of a hypersonic vehicle with angle of attack constraints. In Proceedings of the 10th Asian Control Conference, Kota Kinabalu, Malaysia, 31 May–3 June 2015. [Google Scholar]
- Swaroop, D.; Hedrick, J.; Yip, P.; Gerdes, J. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Wang, D.; Huang, J. Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw. 2005, 16, 195–202. [Google Scholar] [CrossRef] [PubMed]
- Hou, M.; Duan, G. Robust adaptive dynamic surface control of uncertain nonlinear systems. Int. J. Control Autom. Syst. 2011, 9, 161–168. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Won, D.; Chung, C.C. Disturbance-observerbased position tracking controller in the presence of biased sinusoidal disturbance for electrohydraulic actuators. IEEE Trans. Control Syst. Technol. 2013, 21, 2290–2298. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties. IEEE/ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown. IEEE Trans. Ind. Electron. 2016, 63, 6909–6920. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. A practical nonlinear adaptive control of hydraulic servomechanisms with periodic-like disturbances. IEEE/ASME Trans. Mechatron. 2015, 20, 2752–2760. [Google Scholar] [CrossRef]
- Guo, Q.; Sun, P.; Yin, J.; Yu, T.; Jiang, D. Parametric adaptive estimation and backstepping control of electro-hydraulic actuator with decayed memory. ISA Trans. 2016, 62, 202–214. [Google Scholar] [CrossRef] [PubMed]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; John Wiley & Sons: New York, NY, USA, 1995. [Google Scholar]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Liu, Y.; Jiang, D.; Wang, Q.; Xiong, W.; Liu, J.; Li, X. Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface. Appl. Sci. 2018, 8, 76. https://doi.org/10.3390/app8010076
Guo Q, Liu Y, Jiang D, Wang Q, Xiong W, Liu J, Li X. Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface. Applied Sciences. 2018; 8(1):76. https://doi.org/10.3390/app8010076
Chicago/Turabian StyleGuo, Qing, Yili Liu, Dan Jiang, Qiang Wang, Wenying Xiong, Jie Liu, and Xiaochai Li. 2018. "Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface" Applied Sciences 8, no. 1: 76. https://doi.org/10.3390/app8010076
APA StyleGuo, Q., Liu, Y., Jiang, D., Wang, Q., Xiong, W., Liu, J., & Li, X. (2018). Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface. Applied Sciences, 8(1), 76. https://doi.org/10.3390/app8010076