Hydroacoustic and Pressure Turbulence Analysis for the Assessment of Fish Presence and Behavior Upstream of a Vertical Trash Rack at a Run-of-River Hydropower Plant




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
- Seasonal patterns of fish presence in the headrace channel using long-term assessments from single-beam echosounders,
- Observations of fish behavior (spatial distribution) in front of the trash rack with acoustic cameras,
- Assessment of local flow field hydrodynamics via combined time-averaged flow velocity and pressure turbulence measurements.
2. Materials and Methods
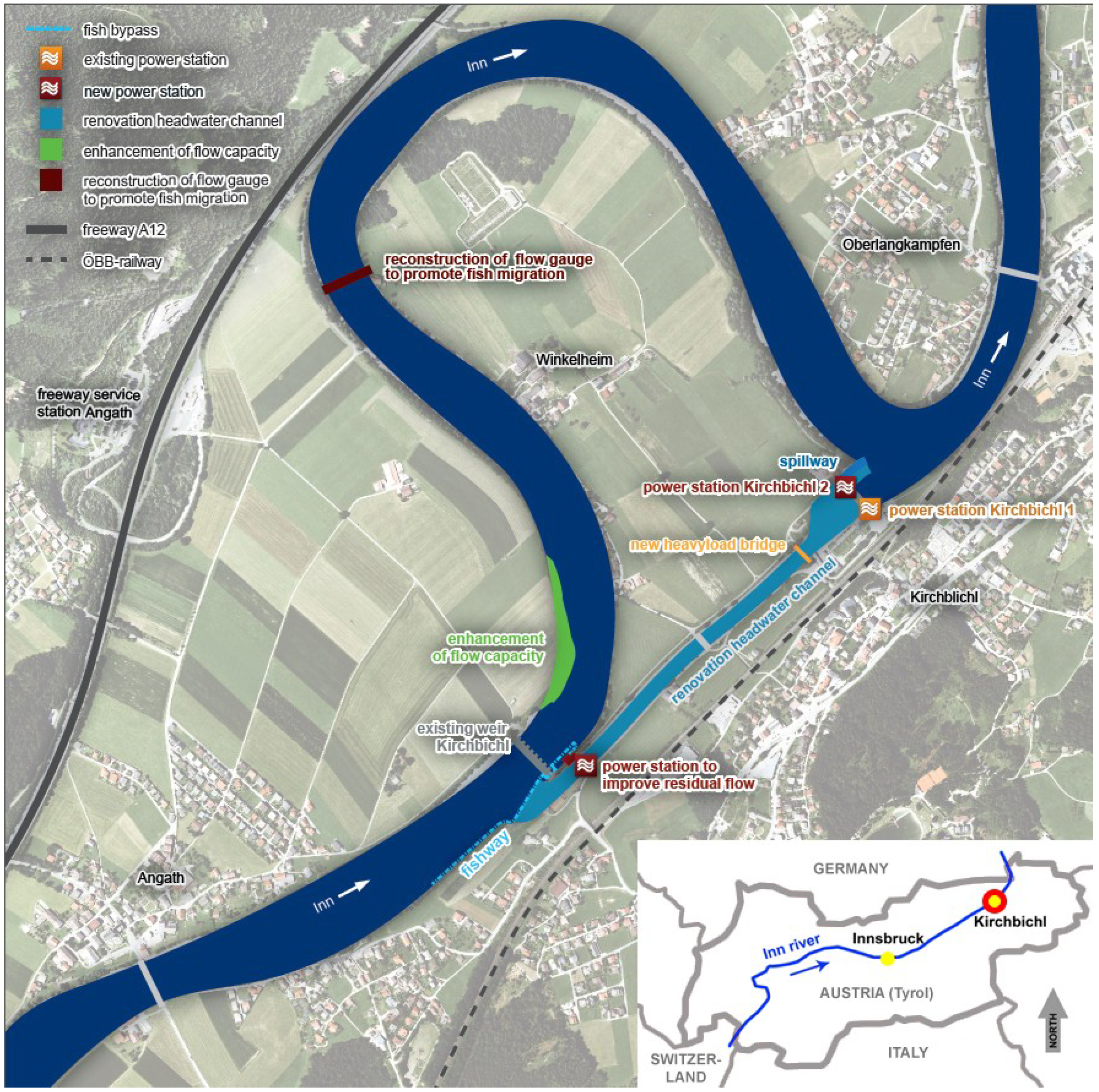
2.1. Case Study Site
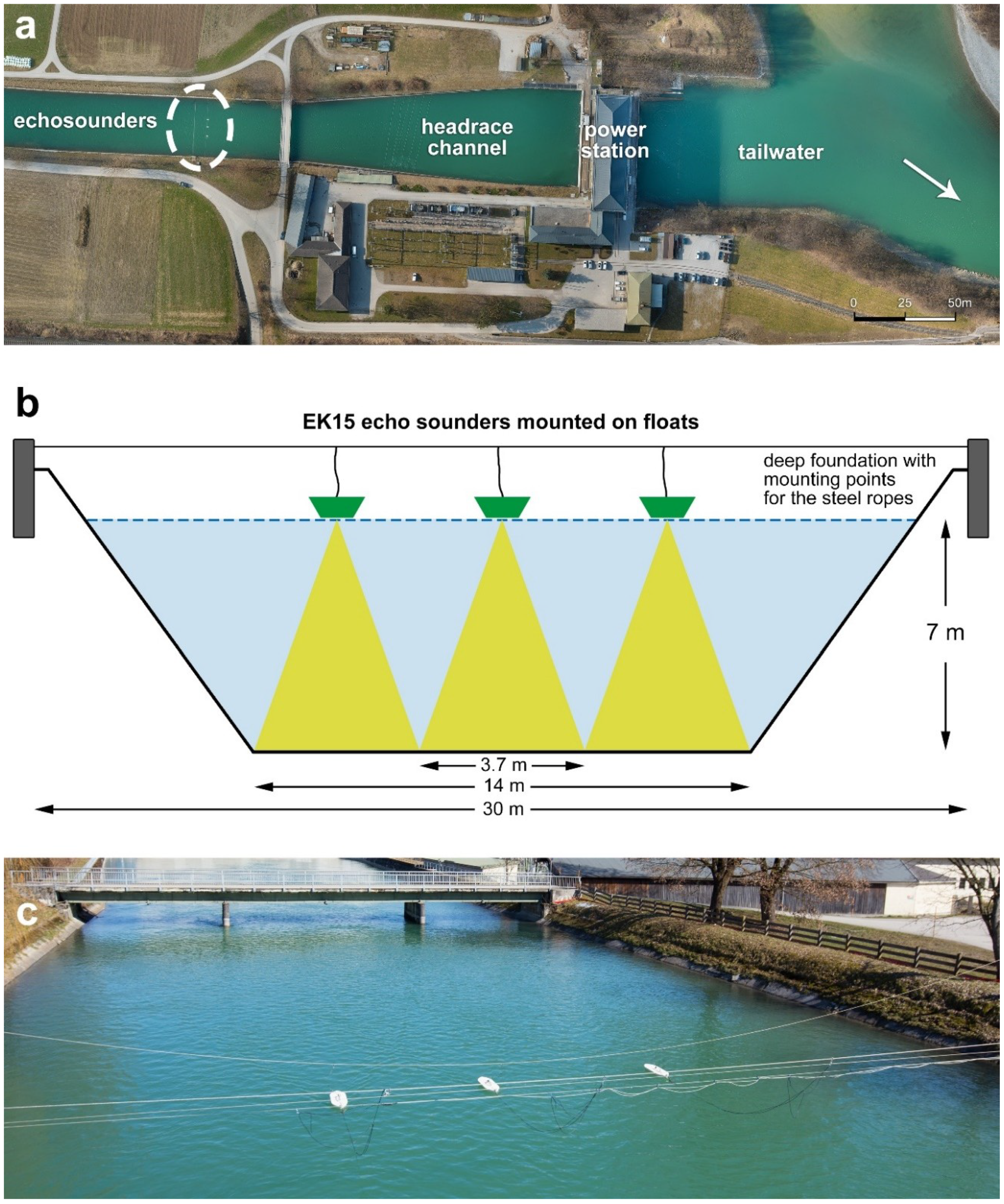
2.2. Long-Term Assessment Using Echosounders
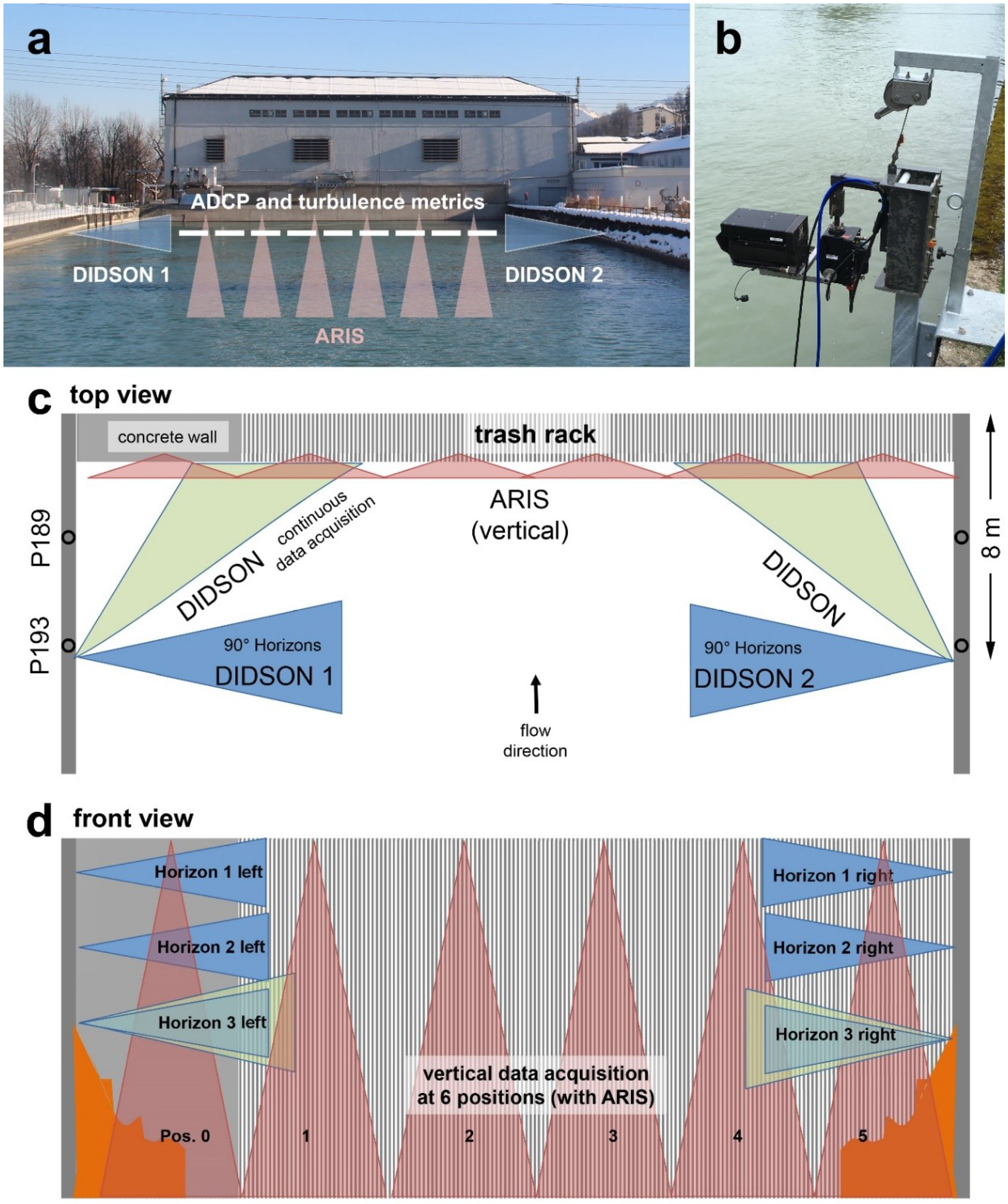
2.3. Detailed Investigation of Fish Behavior
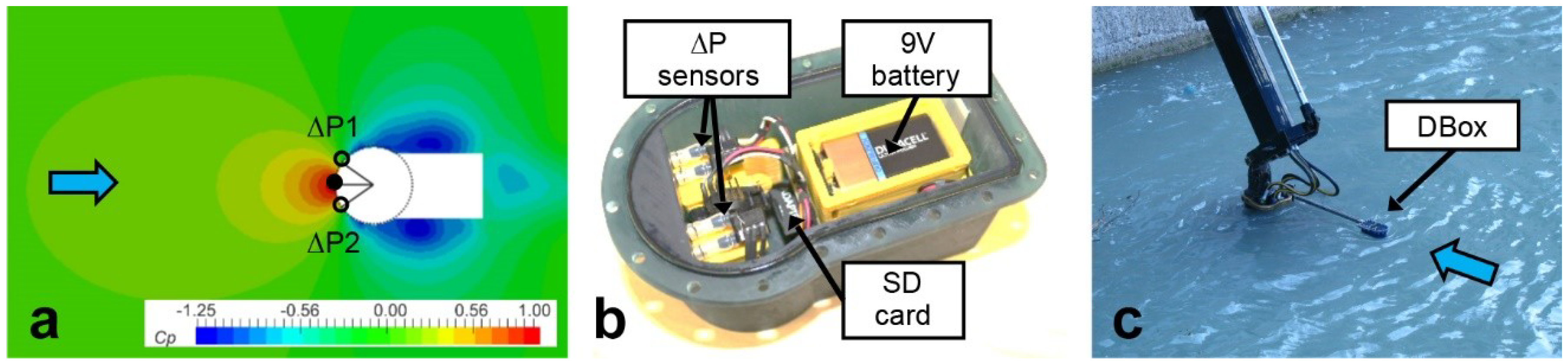
2.4. Flow Field Hydrodynamics
3. Results
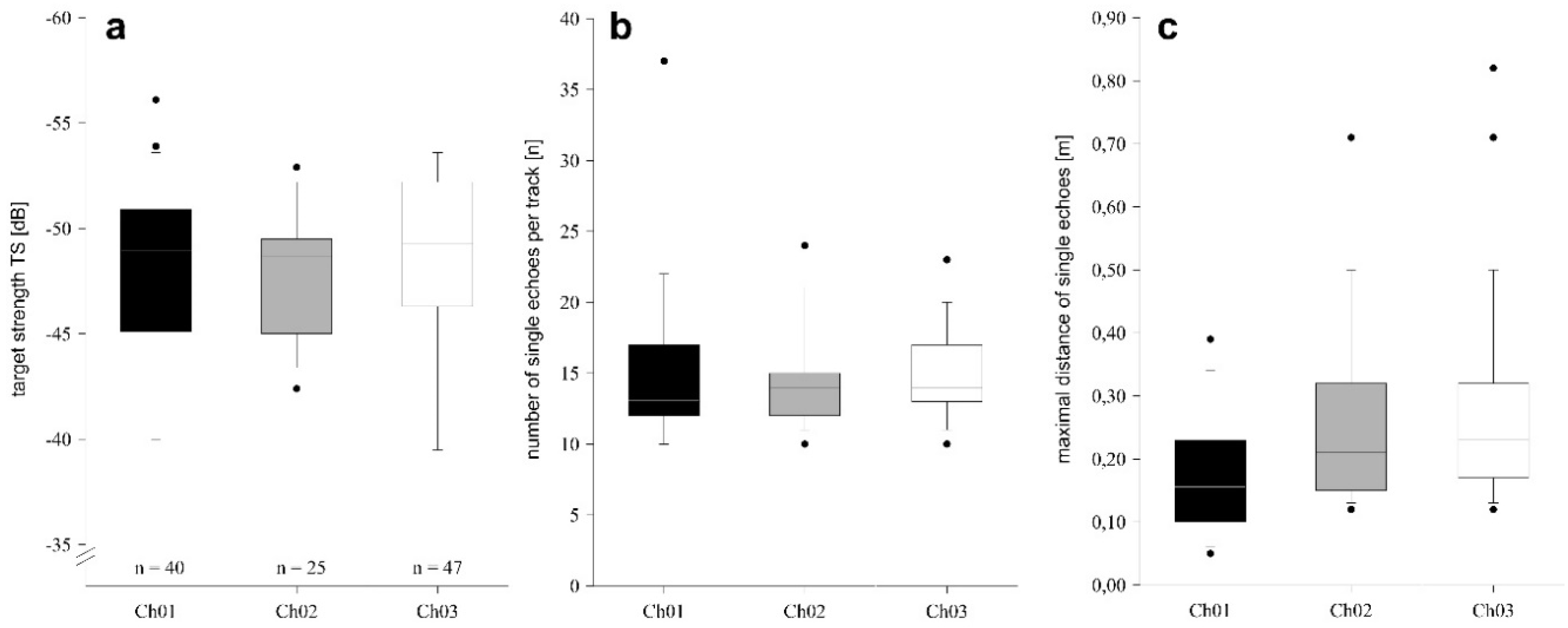
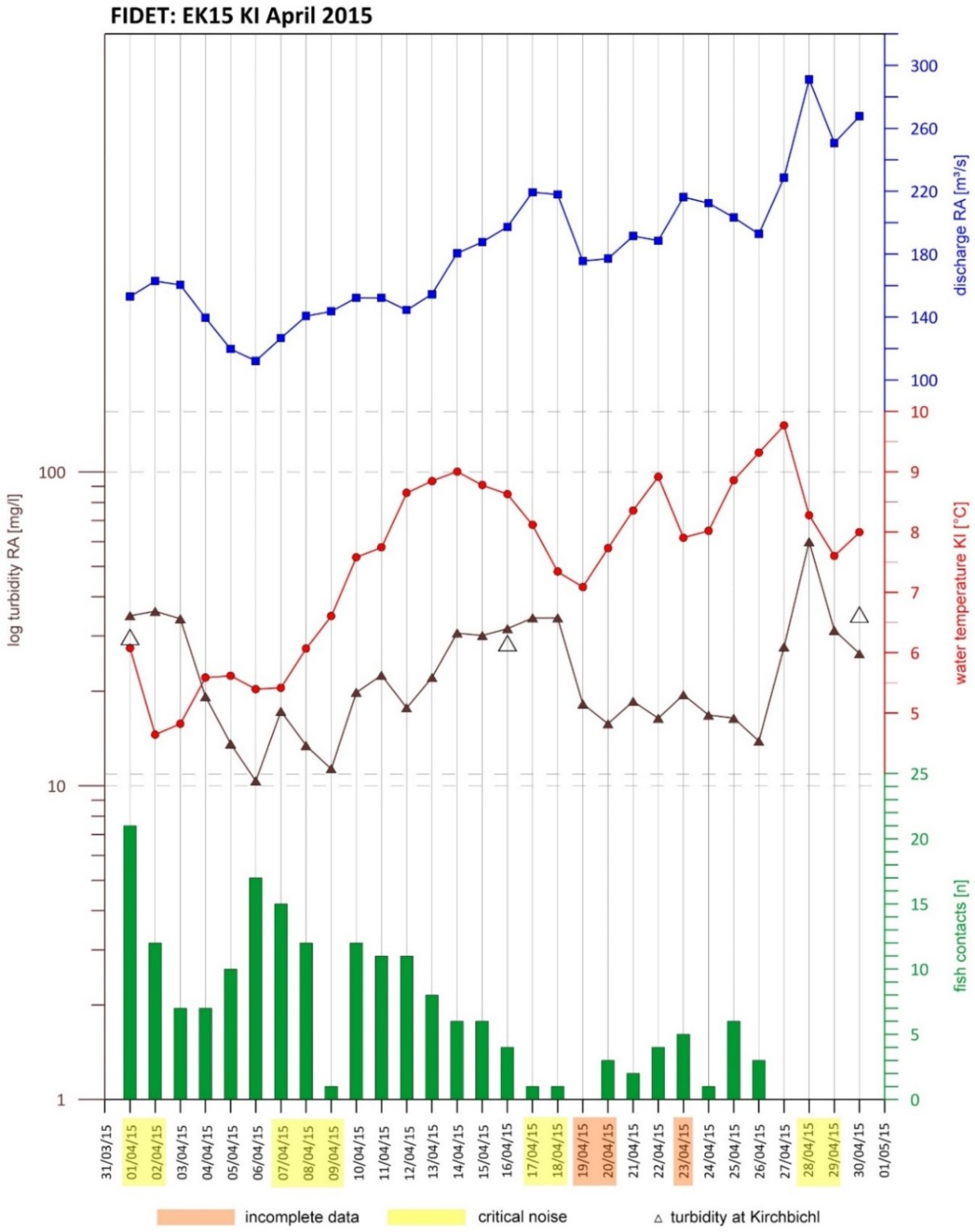
3.1. Long-Term Assessment Based on EK15 Echosounders
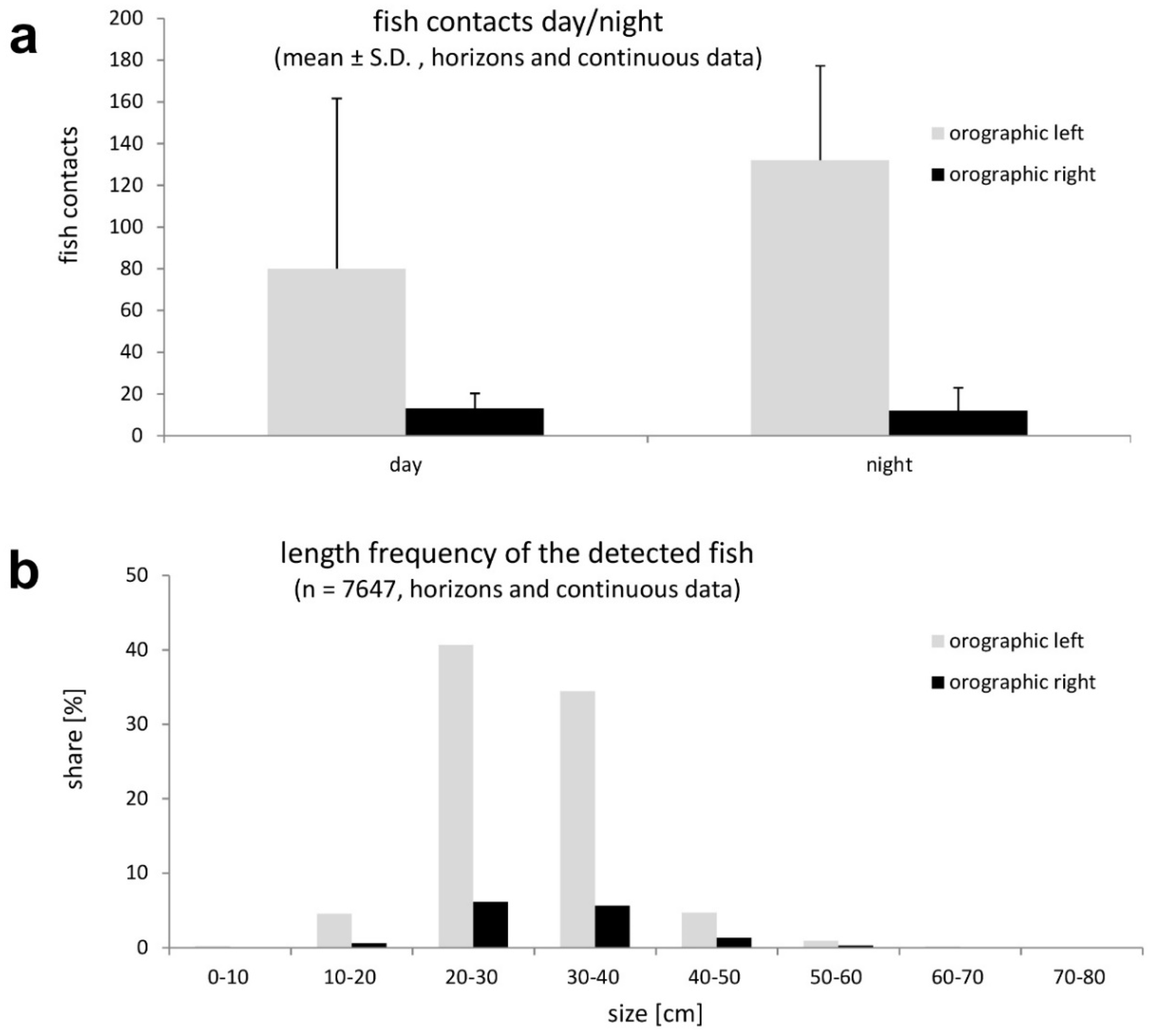
3.2. Investigation of Fish Behavior
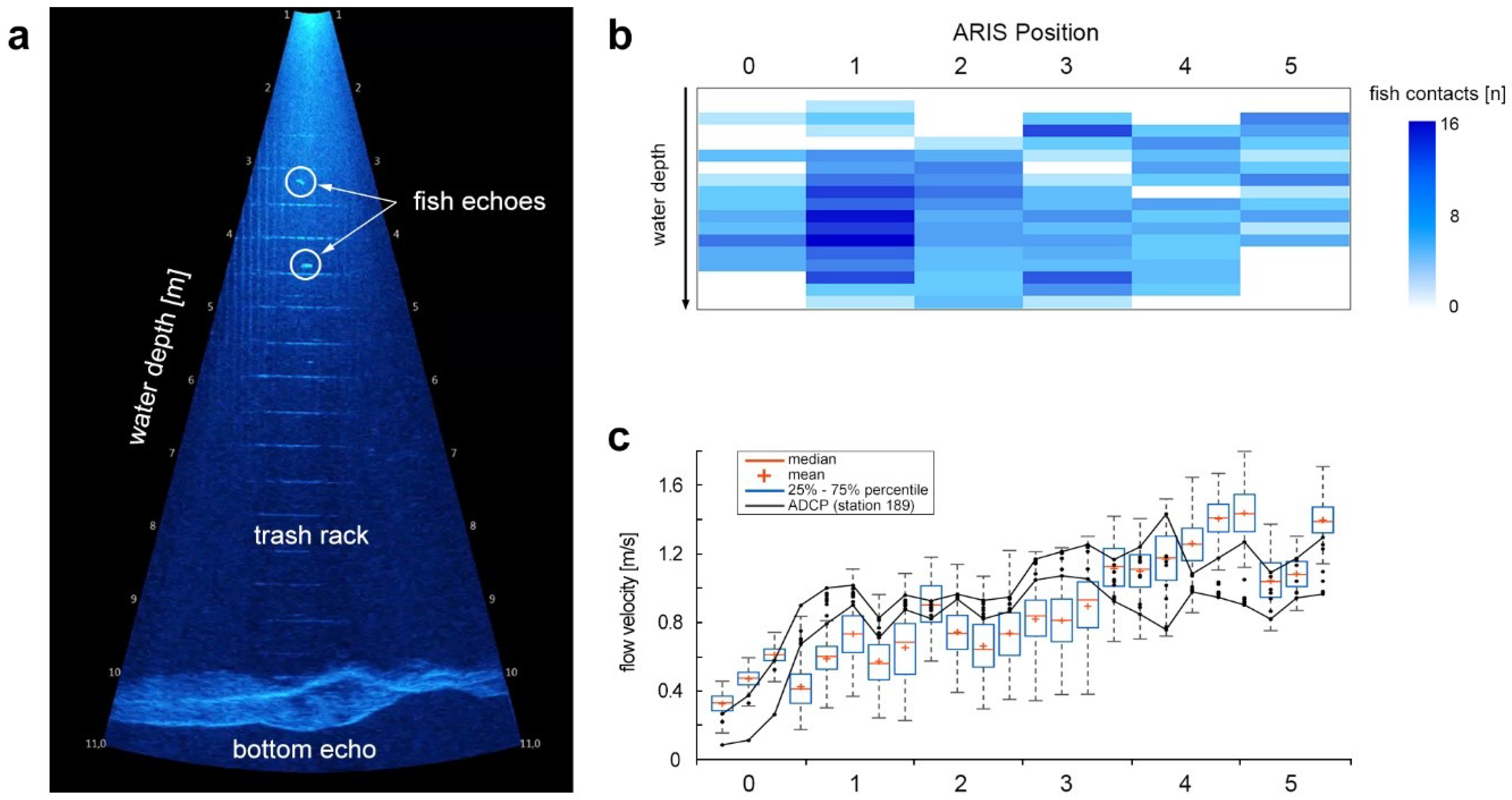
3.3. Flow Turbulence
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Larinier, M. Upstream and downstream fish passage experience in France. In Fish Migration and Fish Bypasses, 1st ed.; Jungwirth, M., Schmutz, S., Weiss, S., Eds.; Blackwell Science Ltd.: Oxford, Country, 1998; pp. 127–145. ISBN 0-85238-253-7. [Google Scholar]
- Pavlov, D.; Lupandin, A.; Kostin, V. Downstream Migration of Fish through Dams of Hydroelectric Power Plants, 1st ed.; Nauka: Moscow, Russia, 1999; 249p. [Google Scholar]
- Larinier, M.; Travade, F. Downstream migration: Problems and facilities. Bull. Fr. Peche Piscic. 2002, 364, 181–207. [Google Scholar] [CrossRef]
- Pavlov, D.S.; Mikheev, V.N.; Lupandin, A.I.; Skorobogatov, M.A. Ecological and behavioural influences on juvenile fish migrations in regulated rivers: A review of experimental and field studies. Hydrobiologia 2008, 609, 125–138. [Google Scholar] [CrossRef]
- Munlv Nrw. Handbuch Querbauwerke, 1st ed.; Ministerium für Umwelt und Naturschutz, Landwirtschaft und Verbraucherschutz des Landes Nordrhein-Westfalen: Düsseldorf, Germany, 2005; 212p, ISBN 3-9810063-2-1. [Google Scholar]
- DWA. Fischschutz- und Fischabstiegsanlagen—Bemessung, Gestaltung, Funktionskontrolle, 2nd ed.; DWA—Deutsche Vereinigung für Wasserwirtschaft, Abwasser und Abfall e.V.: Hennef, Germany, 2005; 356p. [Google Scholar]
- Forum Fischschutz. Available online: https://forum-fischschutz.de (accessed on 11 March 2018).
- Nunn, A.D.; Cowx, I.G. Restoring River Connectivity: Prioritizing Passage Improvements for Diadromous Fishes and Lampreys. Ambio 2012, 41, 402–409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nyqvist, D.; Bergman, E.; Calles, O.; Greenberg, L. Intake Approach and Dam Passage by Downstream-migrating Atlantic Salmon Kelts. River Res. Appl. 2017, 33, 697–706. [Google Scholar] [CrossRef]
- Stein, F.; Doering-Arjes, P.; Fladung, E.; Brämick, U.; Bendall, B.; Schröder, B. Downstream Migration of the European Eel (Anguilla anguilla) in the Elbe River, Germany: Movement Patterns and the Potential Impact of Environmental Factors. River Res. Appl. 2016, 32, 666–676. [Google Scholar] [CrossRef]
- Verhelst, P.; Buysse, D.; Reubens, J.; Pauwels, I.; Aelterman, B.; Van Hoey, S.; Goethals, P.; Coeck, J.; Moens, T.; Mouton, A. Downstream migration of European eel (Anguilla anguilla L.) in an anthropogenically regulated freshwater system: Implications for management. Fish. Res. 2018, 199, 252–262. [Google Scholar] [CrossRef]
- Larinier, M. Fish Passage Experience at Small-Scale Hydro-Electric Power Plants in France. Hydrobiologia 2008, 609, 97–108. [Google Scholar] [CrossRef]
- Økland, F.; Teichert, M.A.K.; Thorstad, E.B.; Havn, T.B.; Heermann, L.; Sæther, S.A.; Diserud, O.H.; Tambets, M.; Hedger, R.D.; Borcherding, J. Downstream Migration of Atlantic Salmon Smolt at Three German Hydropower Stations; NINA Report 1203; NINA Publications: Bonn, Germany, 2016; pp. 1–47. ISBN 978-82-426-2832-9. [Google Scholar]
- Ulrich, J.; Mendez, R.; Kriewitz, C.R. Lösungen für den Fischabstieg am Columbia River (USA). Wasser Energie Luft 2015, 3, 187–192. [Google Scholar]
- Schmidt, M.; Schletterer, M. Hydroakustische Detektion und Fischverhalten an einer großen Wasserkraftanlage: Beispiel Tiroler Inn (Kirchbichl). WasserWirtschaft 2017, 2–3, 65–70. [Google Scholar] [CrossRef]
- Reckendorfer, W.; Loy, G.; Ulrich, J.; Heiserer, T.; Carmignola, G.; Kraus, C.; Zemanek, F.; Schletterer, M. Maßnahmen zum Schutz der Fischpopulation-die Sicht der Betreiber großer Wasserkraftanlagen. WasserWirtschaft 2017, 2–3, 82–86. [Google Scholar] [CrossRef]
- BMLFUW. Nationaler Gewässerbewirtschaftungsplan 2015; BMLFUW: Wien, Austria, 2017; 358p. [Google Scholar]
- Böttcher, H.; Unfer, G.; Zeiringer, B.; Schmutz, S.; Aufleger, M. Fischschutz und Fischabstie-Kenntnisstand und aktuelle Forschungsprojekte in Österreich. Österreichische Wasser Abfallwirtschaft 2015, 67, 299–306. [Google Scholar] [CrossRef]
- Schneider, J.; Ratschan, C.; Heisey, P.; Avalos, C.; Tuhtan, J.; Haas, C.; Reckendorfer, W.; Schletterer, M.; Zitek, A. Flussabwärts gerichtete Fischwanderung an mittelgroßen Fließgewässern in Österreich. WasserWirtschaft 2017, 12, 33–38. [Google Scholar] [CrossRef]
- Godlewska, M.; Świerzowski, A.; Winfield, I. Hydroacoustics as a tool for studies of fish and their habitat. Ecohydrol. Hydrobiol. 2004, 4, 417–427. [Google Scholar]
- Hoffmann, A.; Schmidt, M.; Lehmhaus, B.; Langkau, M.; Kühlmann, M.; Jesse, M.; Klinger, H.; Belting, K.; Weimer, P. Fischschutzmöglichkeiten an Wasserkraftanlagen. Nat. NRW 2010, 4, 21–25. [Google Scholar]
- Adam, B.; Lehmann, B. Ethohydraulik: Grundlagen, Methoden und Erkenntnisse, 1st ed.; Springer: Heidelberg, Germany; Dortrecht, The Netherlands; London, UK; New York, NY, USA, 2011; p. 351. ISBN 978-3-642-17210-6. [Google Scholar]
- Schmidt, M.; Langkau, M.; Zeyer, M.; Schletterer, M. Fischdetektion an Rechen großer Wasserkraftanlagen mittels akustischer Kameras. WasserWirtschaft 2017, 12, 39–44. [Google Scholar] [CrossRef]
- Coutant, C.C.; Whitney, R.R. Fish behavior in relation to passage through hydropower turbines: A review. Trans. Am. Fish. Soc. 2000, 129, 351–380. [Google Scholar] [CrossRef]
- Tritico, H.M.; Cotel, A.J. The effects of turbulent eddies on the stability and critical swimming speed of creek chub (Semotilus atromaculatus). J. Exp. Biol. 2010, 213, 2284–2293. [Google Scholar] [CrossRef] [PubMed]
- Smith, D.L.; Goodwin, R.A.; Nestler, J.M. Relating Turbulence and Fish Habitat: A New Approach for Management and Research. Rev. Fish. Sci. Aquac. 2014, 22, 123–130. [Google Scholar] [CrossRef]
- Langford, M.T.; Robertson, C.B.; Zhu, D.Z.; Leake, A. Evaluation of the Viability of an Acoustic Doppler Current Profiler for the Velocity Field Analysis of Fish Entrainment Risk at Hydropower Dams. In World Environmental and Water Resources Congress 2011; American Society of Civil Engineers: Reston, VA, USA, 2011; Available online: http://ascelibrary.org/doi/abs/10.1061/41173%28414%29420 (accessed on 24 June 2016).
- Bundesministerium für Verkehr und verstaatlichte Betriebe. Innkraftwerk Kirchbichl. (Österreichische Kraftwerke in Einzeldarstellungen); Verstaatlichte Betriebe, Wien, 1953 (17, p. 20 + 7 Planbeilagen); Bundesministerium f. Verkehr u.
- Gassner, H.; Jagsch, A. Hydroakustische Fischbestandserhebung der Innstaue Langkampfen und Kirchbichl. Unpublished Report KE 196-0002. 2012. [Google Scholar]
- Stockinger, W.; Spindler, T.; Wenzl, P.; Römer, J.; Hörl, C. Kraftwerk Kirchbichl—Erweiterung: Fachbeitrag Gewässerökologie; EIA Report on Aquatic Ecology and Fisheries, (KE920-0001b); TIWAG: Innsbruck, Austria, 2013. [Google Scholar]
- Kongsberg Maritime AS. Simrad EK15 Multi Purpose Scientific Echo Sounder. Available online: https://www.simrad.com/ek15 (accessed on 11 March 2018).
- LFV Hydroakustik GmbH. Fischschutz Forggensee: Hydroakustische Detektion der Fischverteilung und des Fischverhaltens am Entnahmebauwerk (OW). Unpublished report on behalf of E.ON Kraftwerke GmbH. 2015. [Google Scholar]
- Grote, A.B.; Bailey, M.M.; Zydlewski, J.D.; Hightower, J.E. Multibeam sonar (DIDSON) assessment of American shad (Alosa sapidissima) approaching a hydroelectric dam. Can. J. Fish. Aquat. Sci. 2014, 71, 545–558. [Google Scholar] [CrossRef]
- O’Connell, C.P.; Hyun, S.-Y.; Rillahan, C.B.; He, P. Bull shark (Carcharhinus leucas) exclusion properties of the sharksafe barrier and behavioral validation using the ARIS technology. Glob. Ecol. Conserv. 2014, 2, 300–314. [Google Scholar] [CrossRef]
- Martignac, F.; Daroux, A.; Bagliniere, J.-L.; Ombredane, D.; Guillard, J. The use of acoustic cameras in shallow waters: New hydroacoustic tools for monitoring migratory fish population. A review of DIDSON technology. Fish. Fish. 2015, 16, 486–510. [Google Scholar] [CrossRef]
- Handegard, N.O.; Williams, K. Automated tracking of fish in trawls using the Didson (Dual-frequency Identification Sonar). ICES J. Mar. Sci. 2008, 65, 636–644. [Google Scholar] [CrossRef]
- Hateley, J.; Gregory, J. Evaluation of a Multi-Beam Imaging Sonar System (DIDSON) as FISHERIES Monitoring Tool: Exploiting the Acoustic Advantage; Technical Report; Environment Agency: London, UK, 2008. [Google Scholar]
- Mueller, A.M.; Mulligan, T.; Withler, P.K. Classifying Sonar Images: Can a Computer-Driven Process Identify Eels? North. Am. J. Fish. Manag. 2008, 28, 1876–1886. [Google Scholar] [CrossRef] [Green Version]
- Adams, N.S.; Smith, C.; Plumb, J.M.; Hansen, G.S.; Beeman, J.W. An Evaluation of Fish Behavior Upstream of the Water Temperature Control Tower at Cougar Dam, Oregon, Using Acoustic Cameras; US Geological Survey, Western Fisheries Research Center: Seattle, WA, USA, 2013. [Google Scholar]
- Langkau, M.C.; Clavé, D.; Schmidt, M.B.; Borcherding, J. Spawning behaviour of Allis shad Alosa alosa: New insights based on imaging sonar data. J. Fish. Biol. 2016, 88, 2263–2274. [Google Scholar] [CrossRef] [PubMed]
- Shahrestani, S.; Bi, H.; Lyubchicha, V.; Boswell, K.M. Detecting a nearshore fish parade using the adaptive resolution imaging sonar (ARIS): An automated procedure for data analysis. Fish. Res. 2017, 191, 190–199. [Google Scholar] [CrossRef]
- Belcher, E.O.; Matsuyama, B.; Trimble, R. Object identification with acoustic lenses. In Proceedings of the Conference MTS/IEEE Oceans, Honolulu, HI, USA, 5–8 November 2001; Volume 1, pp. 6–11. [Google Scholar]
- Burwen, D.L.; Fleischman, S.J.; Miller, J.D. Accuracy and precision of salmon length estimates taken from DIDSON sonar images. Trans. Am. Fish. Soc. 2010, 139, 1306–1314. [Google Scholar] [CrossRef]
- Tušer, M.; Frouzová, J.; Balk, H.; Muška, M.; Mrkvička, T.; Kubečka, J. Evaluation of potential bias in observing fish with a DIDSON acoustic camera. Fish. Res. 2014, 155, 114–121. [Google Scholar] [CrossRef]
- Penney, G.W.; Fechheimer, C.J. Abridgment of thermal volume meter. J. AIEE 1928, 47, 181–184. [Google Scholar] [CrossRef]
- Fuentes-Pérez, J.F.; Meurer, C.; Tuhtan, J.A.; Kruusmaa, M. Differential Pressure Sensors for Underwater Speedometry in Variable Velocity and Acceleration Conditions. IEEE J. Ocean. Eng. 2018, 43, 418–426. [Google Scholar] [CrossRef]
- Fuentes-Pérez, J.F.; Kalev, K.; Tuhtan, J.A.; Kruusmaa, M. Underwater vehicle speedometry using differential pressure sensors: Preliminary results. In Autonomous Underwater Vehicles (AUV), 2016 IEEE/OES; IEEE: Piscataway, NJ, USA, 2016; pp. 156–160. [Google Scholar]
- Schletterer, M.; Götsch, H.; Tuhtan, J.A.; Fuentes-Perez, J.F.; Kruusmaa, M. More than depth: Developing pressure sensing systems for aquatic environments. In Proceedings of the HydroSenSoft, International Symposium and Exhibition on Hydro-Environment Sensors and Software, Madrid, Spain, 1–3 March 2017. [Google Scholar]
- Neuhart, D.H.; Jenkins, L.N.; Choudhari, M.M.; Khorrami, M.R. Measurements of the flowfield interaction between tandem cylinders. In Proceedings of the 15th AIAA/CEAS Aeroacoustics Conference 30th AIAA Aeroacoustics Conference, Miami, FL, USA, 11–13 May 2009; p. 3275. [Google Scholar]
- Zhang, Y.O.; Zhang, T.; Ouyang, H.; Li, T.Y. Flow-induced noise analysis for 3D trash rack based on LES/Lighthill hybrid method. Appl. Acoust. 2014, 79, 141–152. [Google Scholar] [CrossRef]
- Nystrom, E.A.; Rehmann, C.R.; Oberg, K.A. Evaluation of mean velocity and turbulence measurements with ADCPs. J. Hydraul. Eng. 2007, 133, 1310–1318. [Google Scholar] [CrossRef]
- Smith, R.J.F. The Control of Fish Migration; Springer Science & Business Media: Berlin, Germany, 1985; ISBN 978-3-642-82348-0. [Google Scholar]
- Pander, J.; Mueller, M.; Knott, J.; Geist, J. Catch-related fish injury and catch efficiency of stow-netbased fish recovery installations for fish-monitoring at hydropower plants. Fish. Manag. Ecol. 2018, 25, 31–43. [Google Scholar] [CrossRef]
- Ransom, B.H.; Steig, T.W. Using Hydroacoustics to Monitor Fish at Hydropower Dams. Lake Reserv. Manag. 1994, 9, 163–169. [Google Scholar] [CrossRef]
- Steig, T.W.; Iverson, T.K. Acoustic monitoring of salmonid density, target strength, and trajectories at two dams on the Columbia River, using a split-beam scanning system. Fish. Res. 1998, 35, 43–53. [Google Scholar] [CrossRef]
- Loures, R.C.; Pompeu, P.S. Seasonal and diel changes in fish distribution in a tropical hydropower plant tailrace: Evidence from hydroacoustic and gillnet sampling. Fish. Manag. Ecol. 2015, 22, 185–196. [Google Scholar] [CrossRef]
- Simmonds, E.J.; MacLennan, D.N. Fisheries Acoustics, 2nd ed.; Blackwell Science: Oxford, UK, 2005. [Google Scholar]
- Piper, A.T.; Rosewarne, P.J.; Wright, R.M.; Kemp, P.S. The impact of an Archimedes screw hydropower turbine on fish migration in a lowland river. Ecol. Eng. 2018, 118, 31–42. [Google Scholar] [CrossRef]
- Langkau, M.C. Echoes in motion: An acoustic camera (DIDSON) as a monitoring tool in applied freshwater ecology. Ph.D. Thesis, University of Cologne, Cologne, Germany, 2017; p. 89. [Google Scholar]
- Mendez, R.; Riesen, P.; Wyss, C. Untersuchungen zur Aktivität von Adulten Seeforellen am Oberwasserkanal und Stauwehr mit bildgebenden Sonar. Axpo Power AG (Internal report, Baden, Switzerland). 2017, p. 69. Available online: https://www.gr.ch/DE/institutionen/verwaltung/bvfd/ajf/dokumentation/Fischerei_Publikationen/KWR%20Auswertung%20ARIS%20Sonaraufnahmen%20Bericht_Final%202016.pdf (accessed on 7 April 2018).
- Klein, A.; Bleckmann, H. The muscle activity of trout exposed to unsteady flow. J. Comp. Physiol. A 2017, 203, 163–173. [Google Scholar] [CrossRef] [PubMed]
- Mufeed, O.; Noreika, J.F.; Haro, A.; Maynard, A.; Castro-Santos, T.; Cada, G.F. Evaluation of the Effects of Turbulence on the Behavior of Migratory Fish; Final Report to the Bonneville Power Administration, Contract 22; US Department of Energy: Washington, DC, USA, 2002.
- Wang, H.; Chanson, H. Modelling upstream fish passage in standard box culverts: Interplay between turbulence, fish kinematics, and energetics. River Res. Appl. 2018, 34, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Juell, J.-E.; Fosseidengen, J.E. Use of artificial light to control swimming depth and fish density of Atlantic salmon (Salmo salar) in production cages. Aquaculture 2004, 233, 269–282. [Google Scholar] [CrossRef]
- Fischer, J.; Schmalz, M. Optimierung der Druckkammerschschleuse mit energetischer Nutzung an der Talsperre Höllenstein. WasserWirtschaft 2015, 105, 38–41. [Google Scholar] [CrossRef]
- Schmidt, M.; Hoffmann, A.; Heermann, J.; Langkau, M.; Zeyer, M. Didson-Based Object Tracking (D-BOT)—Fischdetektion in Echtzeit als Maßnahmen- und Schutzinstrument an Wasserkraftanlagen. WasserWirtschaft 2018, 9, 49–53. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidt, M.B.; Tuhtan, J.A.; Schletterer, M. Hydroacoustic and Pressure Turbulence Analysis for the Assessment of Fish Presence and Behavior Upstream of a Vertical Trash Rack at a Run-of-River Hydropower Plant. Appl. Sci. 2018, 8, 1723. https://doi.org/10.3390/app8101723
Schmidt MB, Tuhtan JA, Schletterer M. Hydroacoustic and Pressure Turbulence Analysis for the Assessment of Fish Presence and Behavior Upstream of a Vertical Trash Rack at a Run-of-River Hydropower Plant. Applied Sciences. 2018; 8(10):1723. https://doi.org/10.3390/app8101723
Chicago/Turabian StyleSchmidt, Marc B., Jeffrey A. Tuhtan, and Martin Schletterer. 2018. "Hydroacoustic and Pressure Turbulence Analysis for the Assessment of Fish Presence and Behavior Upstream of a Vertical Trash Rack at a Run-of-River Hydropower Plant" Applied Sciences 8, no. 10: 1723. https://doi.org/10.3390/app8101723
APA StyleSchmidt, M. B., Tuhtan, J. A., & Schletterer, M. (2018). Hydroacoustic and Pressure Turbulence Analysis for the Assessment of Fish Presence and Behavior Upstream of a Vertical Trash Rack at a Run-of-River Hydropower Plant. Applied Sciences, 8(10), 1723. https://doi.org/10.3390/app8101723