Head-Raising of Snake Robots Based on a Predefined Spiral Curve Method



Abstract
:1. Introduction
- A new shape control curve, the predefined spiral curve, is proposed and it is utilized for 3D head-raising of a snake robot;
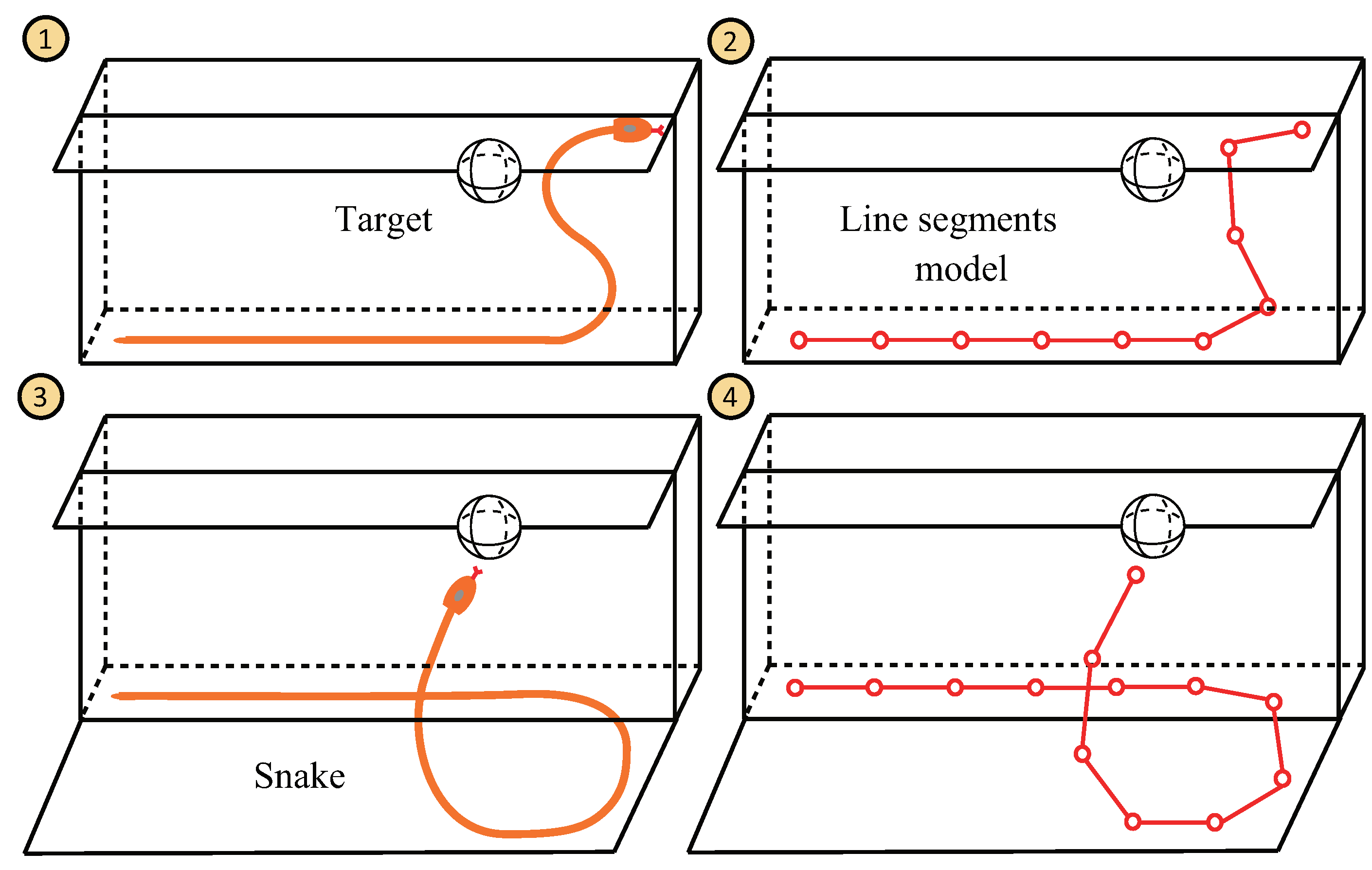
- A shape-fitting algorithm is developed for adhering the line segments model of the snake robot to the predefined spiral curve;
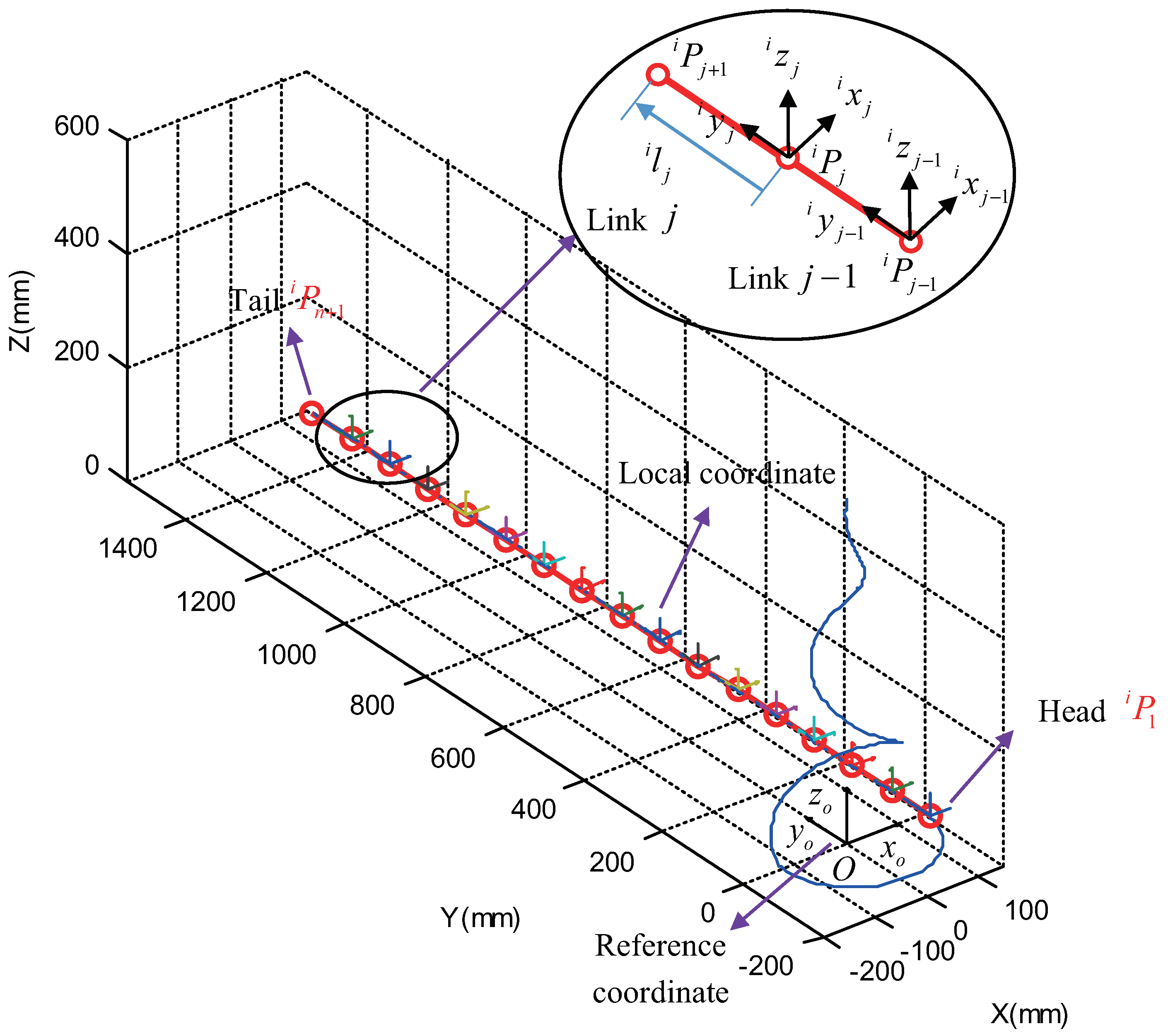
- Establishment rules of coordinate system are given for line segments model of the snake robot;
- A phase-shifting and an angle-solving algorithms are presented for obtaining angle trajectories used during head-raising motion.
2. Modeling of Head-Raising Motion
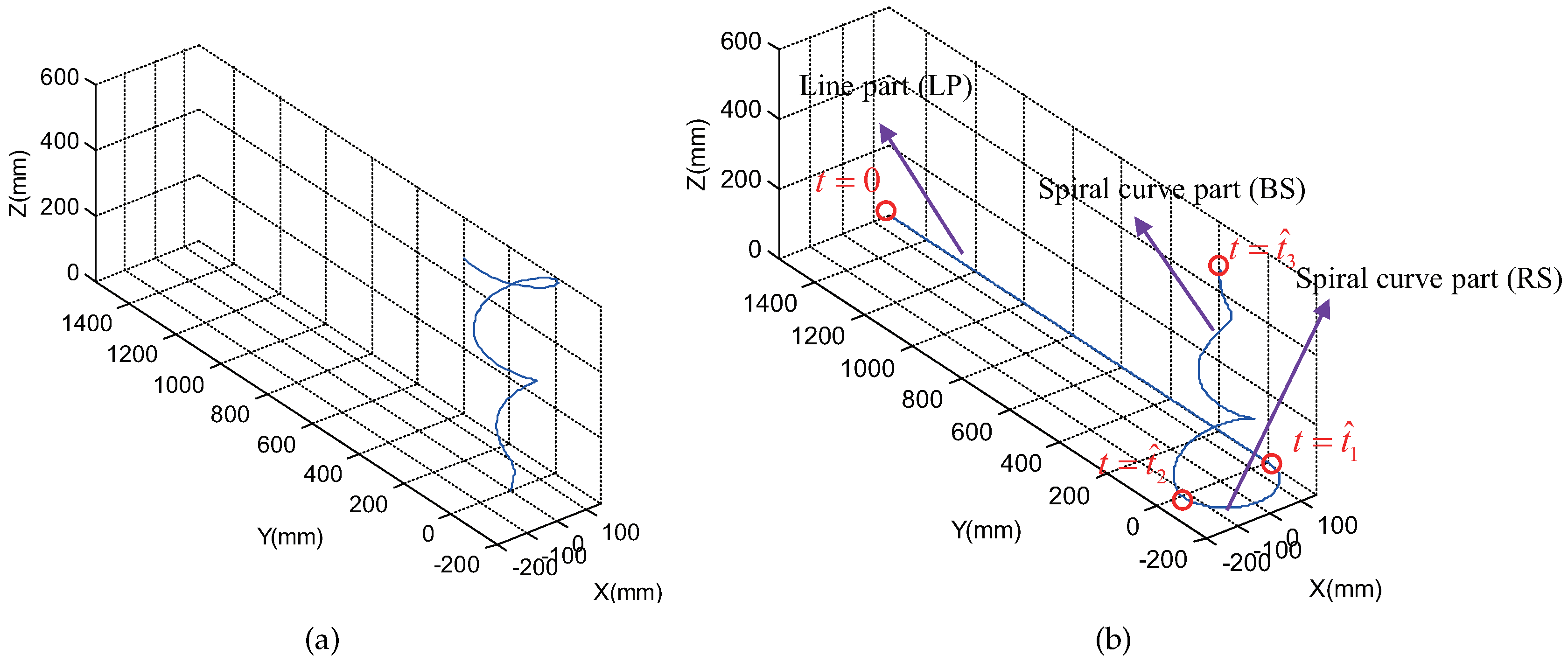
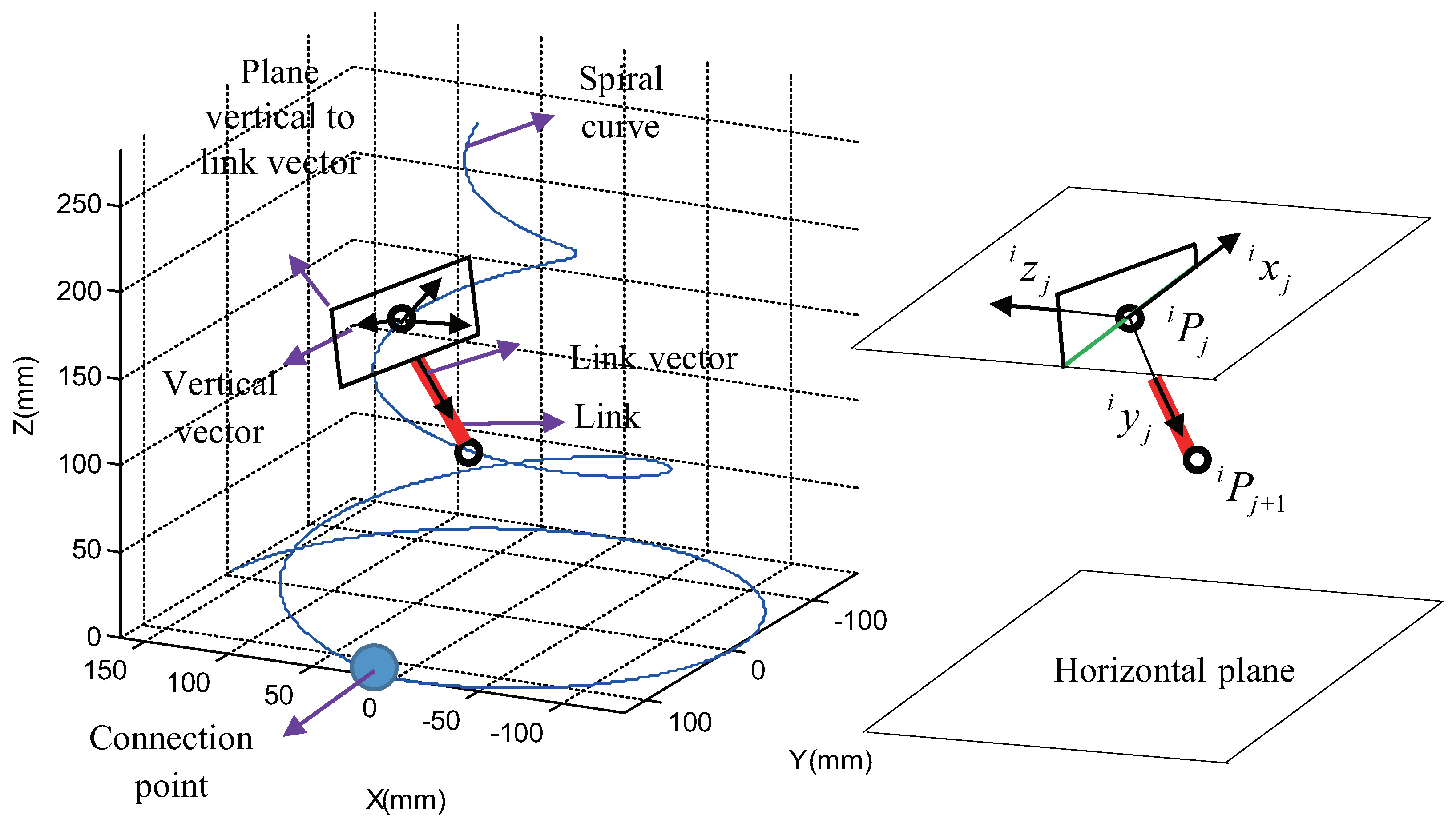
2.1. Predefined Spiral Curve
2.2. Shape-Fitting and Phase-Shifting Methods
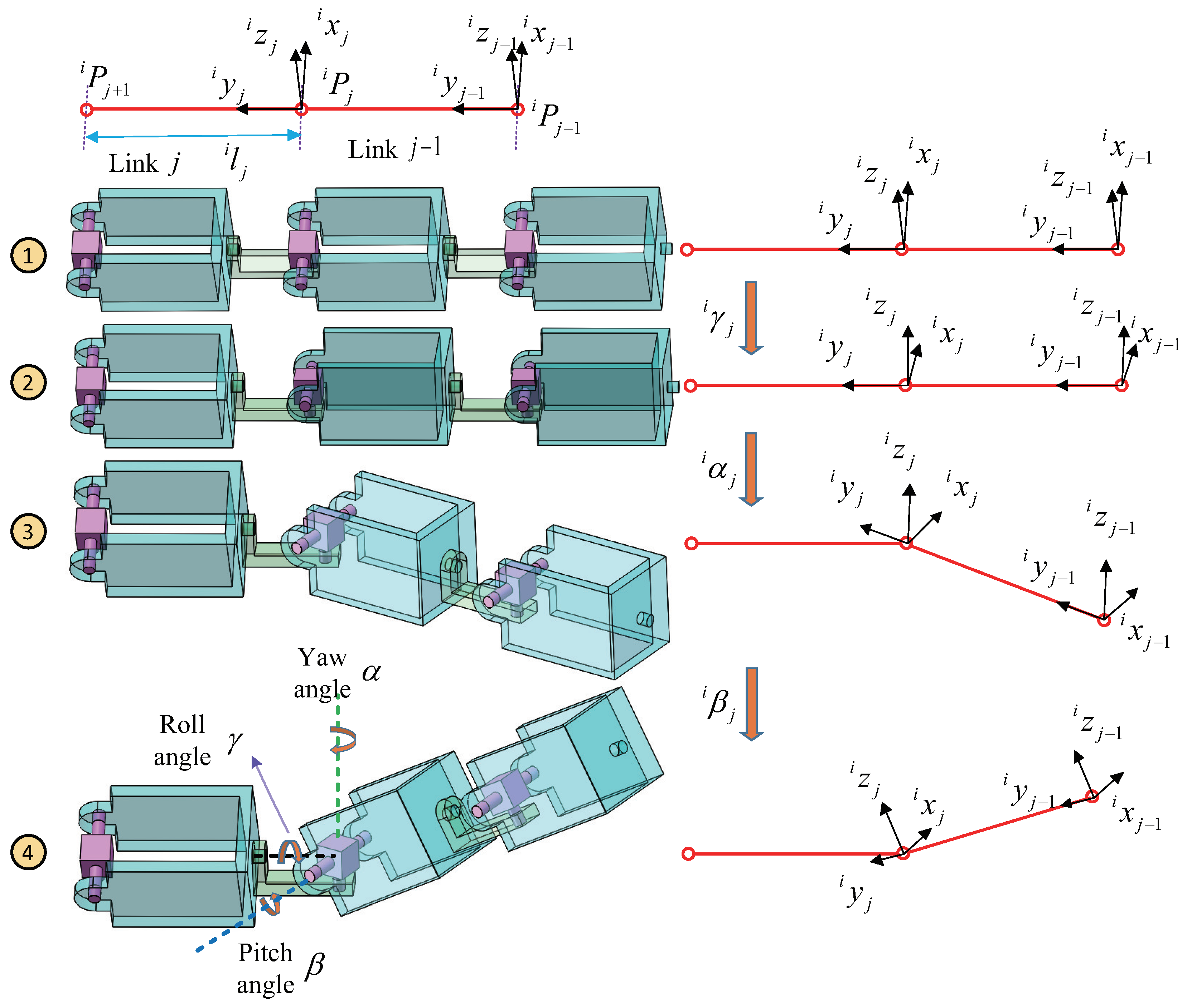
2.3. Coordinate System and Angle-Solving Algorithm
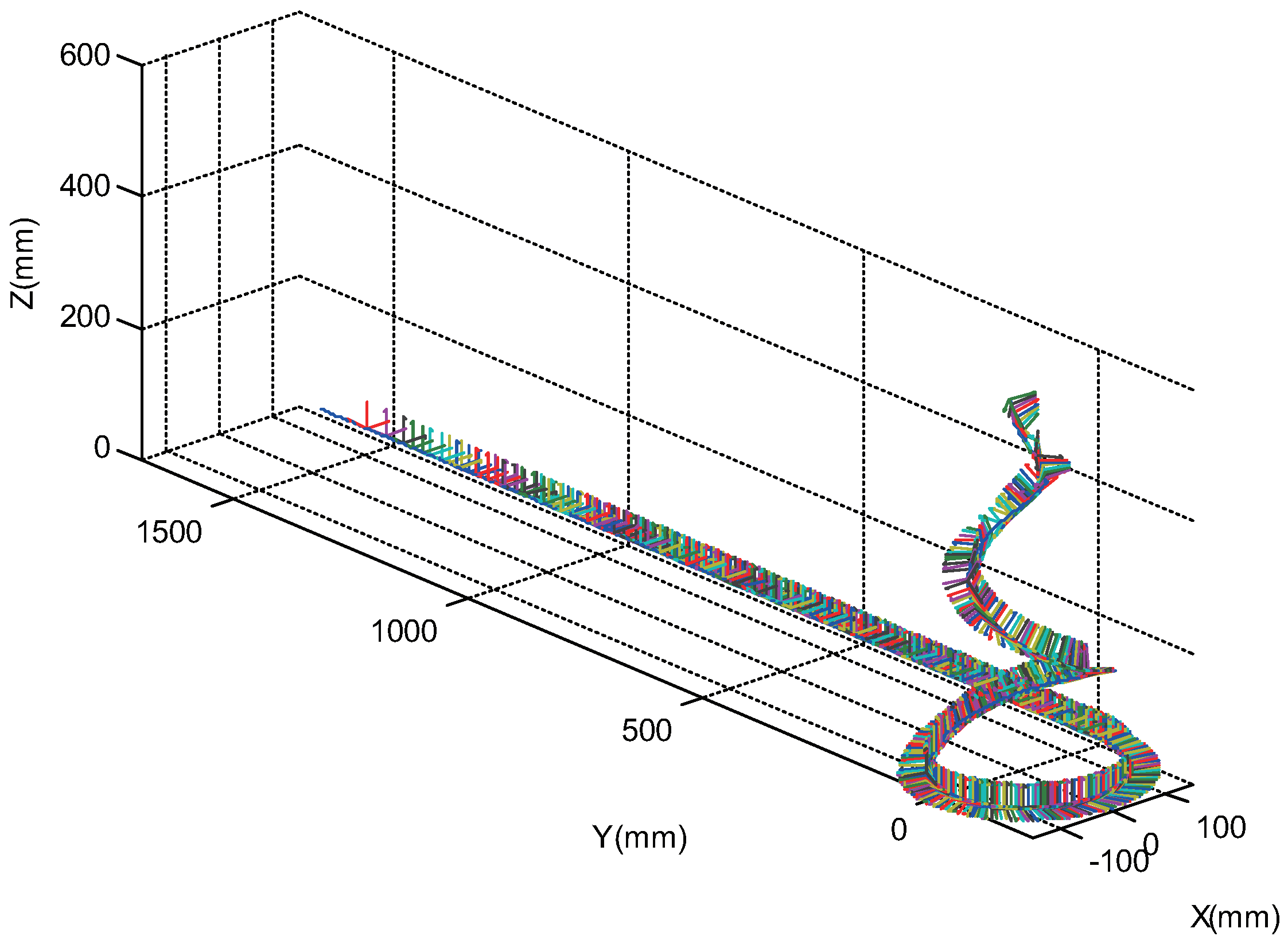
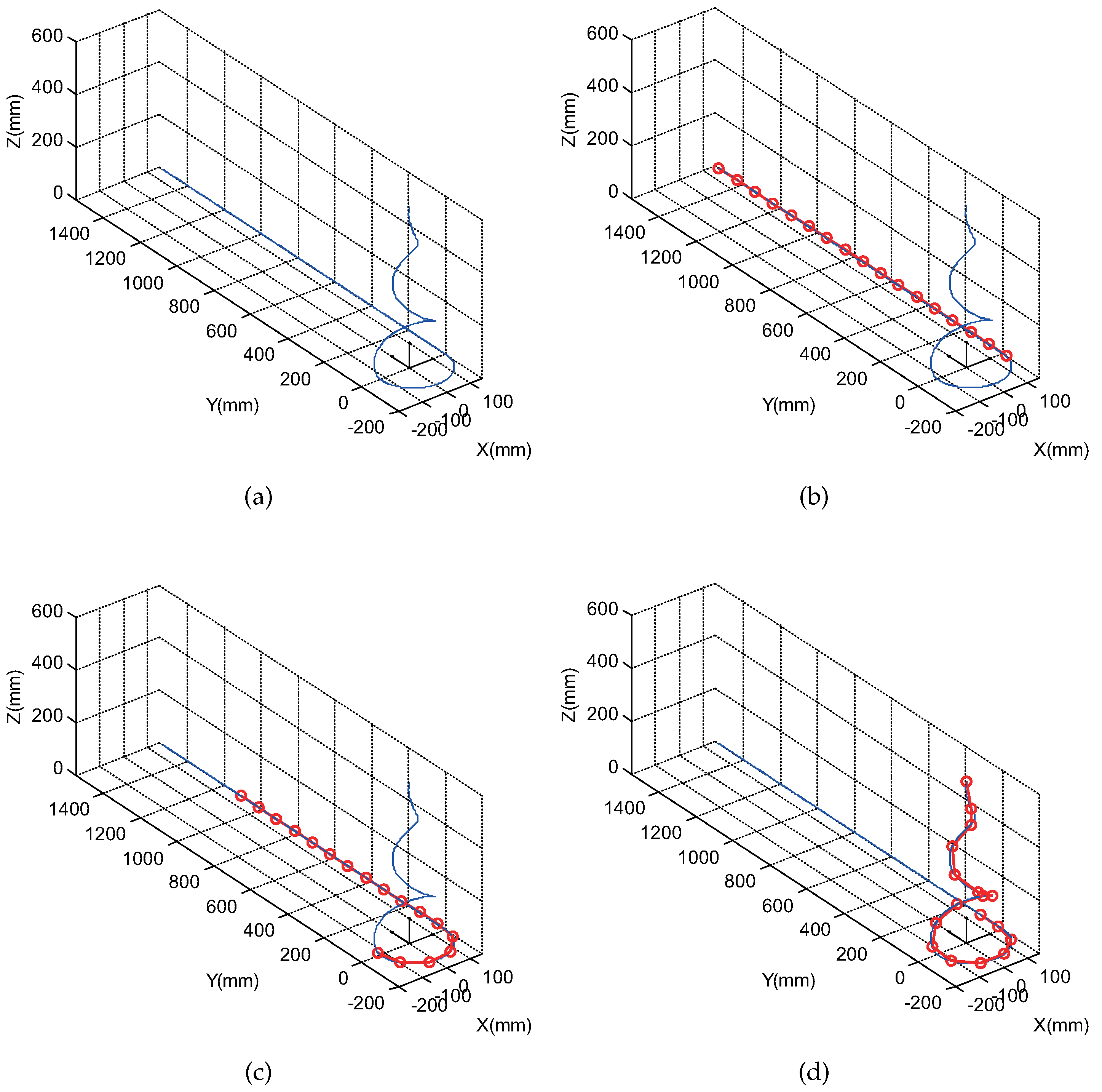
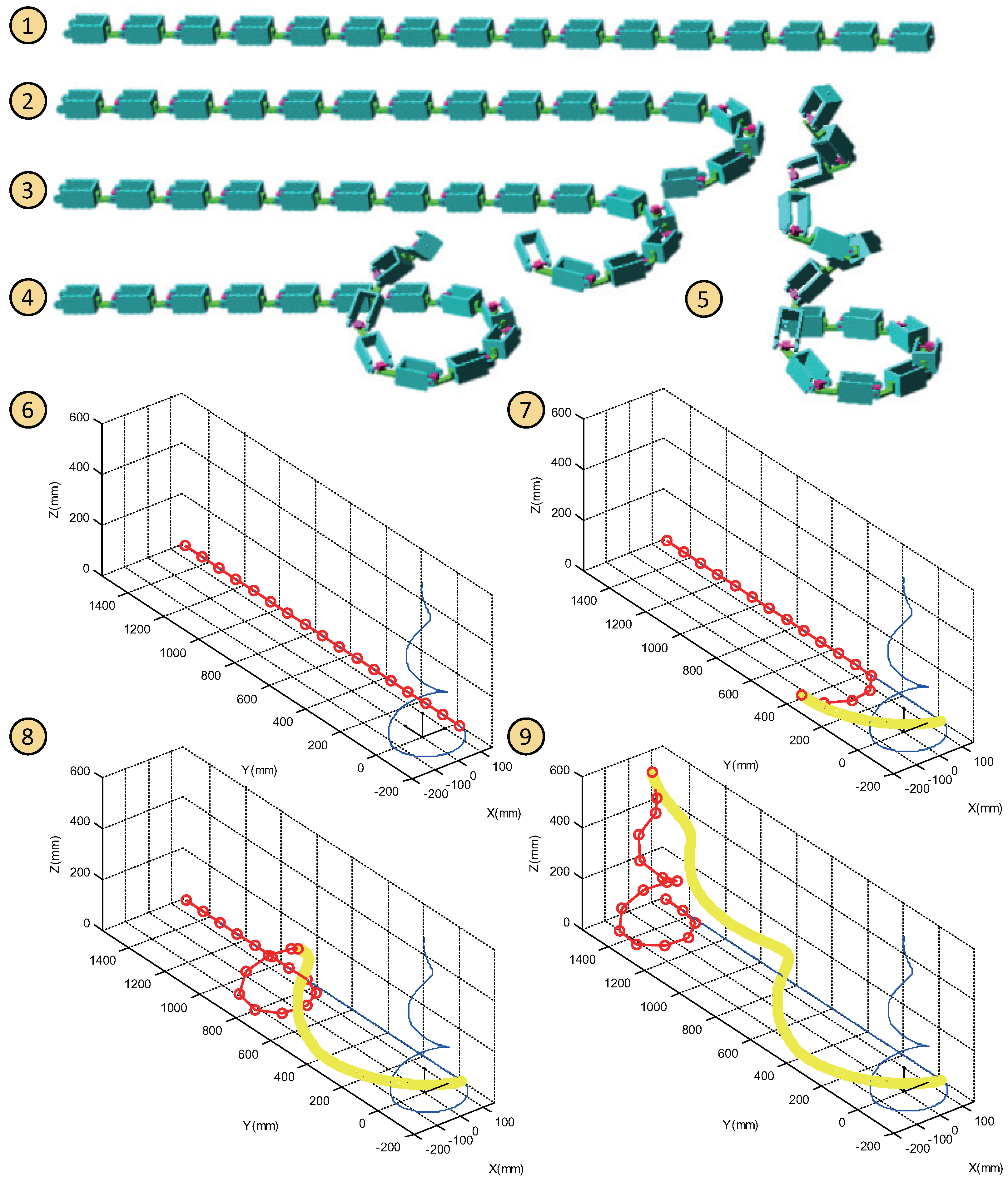
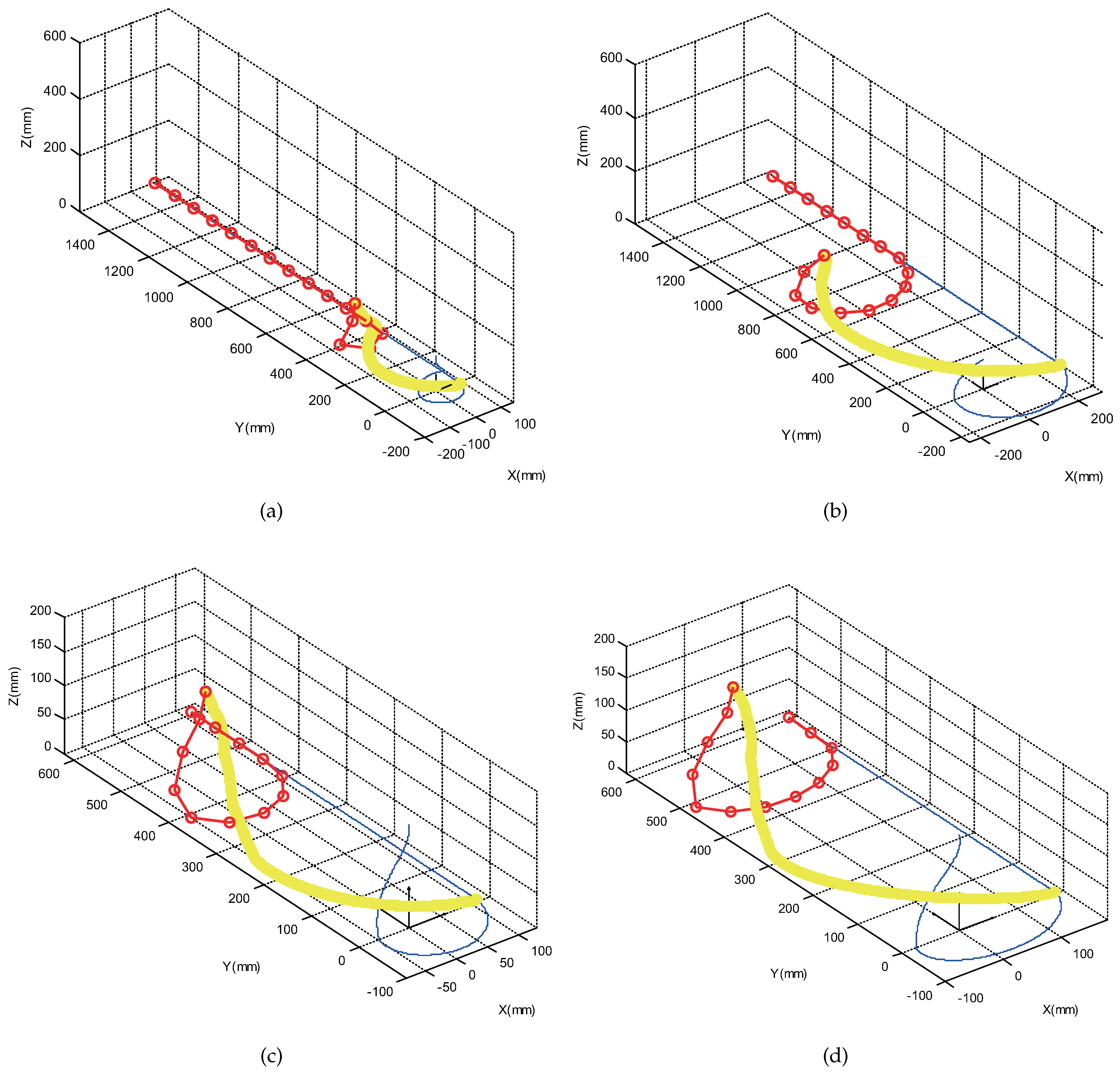
3. Simulation on Head-Raising Motion
- (1)
- Determine the basic posture as Equation (6), and set motion step ;
- (2)
- Proceed to motion step . The link n is fixed. Calculate the position of link on the basis of angles , , and ;
- (3)
- Make an iteration to calculate all of the positions of the links, that is, link , on the basis of angles , ;
- (4)
- Proceed to motion step and repeat steps 2 and 3 until .
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 2D | Two dimensional |
| 3D | Three dimensional |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| x value of line part in the predefined spiral curve | |
| y value of line part in the predefined spiral curve | |
| z value of line part in the predefined spiral curve | |
| x value of spiral curve part in the predefined spiral curve | |
| y value of spiral curve part in the predefined spiral curve | |
| z value of spiral curve part in the predefined spiral curve | |
| a | Adjustment coefficient of the spiral curve, which can be used to change the amplitude of and equally |
| b | Adjustment coefficient of the spiral curve, which can be used to change the amplitude of and unequally |
| c | Adjustment coefficient of the spiral curve, which can be used to change the amplitude of |
| Initial phase of the sine and cosine functions | |
| Cycle number of the spiral curve | |
| Length of the snake robot modules | |
| n | Number of the snake robot modules |
| t | Independent variable divided into three intervals: , and |
| y value of spiral curve part in the predefined spiral curve | |
| LP | Line part of the predefined spiral curve, corresponding to interval |
| BS | The base of the spiral curve part, which is in contact with the ground and corresponds to interval |
| RS | y The base of the spiral curve part, which is in contact with the ground and corresponds to interval |
| Value of t connecting LP and BS | |
| Value of t connecting BS and RS | |
| End value of t | |
| The phase value of interval | |
| y Discrete value of simulation time | |
| i | Index value of simulation step |
| j | Index value of point P in line segments model of the snake robot |
| Position of point j step i of phase-shifting process | |
| Number of phases shifted | |
| x value of | |
| y value of | |
| z value of | |
| Arc length at step i and defined as “phase” | |
| Point set at step i | |
| y Discrete vector of t | |
| Step length of discretization in interval | |
| Step length of discretization in interval | |
| Index value of element in , which is nearest to during phase-shifting process | |
| Threshold utilized to deal with the error between continuous function and discrete approximation | |
| Reference coordinate | |
| x coordinate axis fixed on the snake module j at step i | |
| y coordinate axis fixed on the snake module j at step i | |
| z coordinate axis fixed on the snake module j at step i | |
| Link vector connecting and | |
| y Local coordinate fixed on link | |
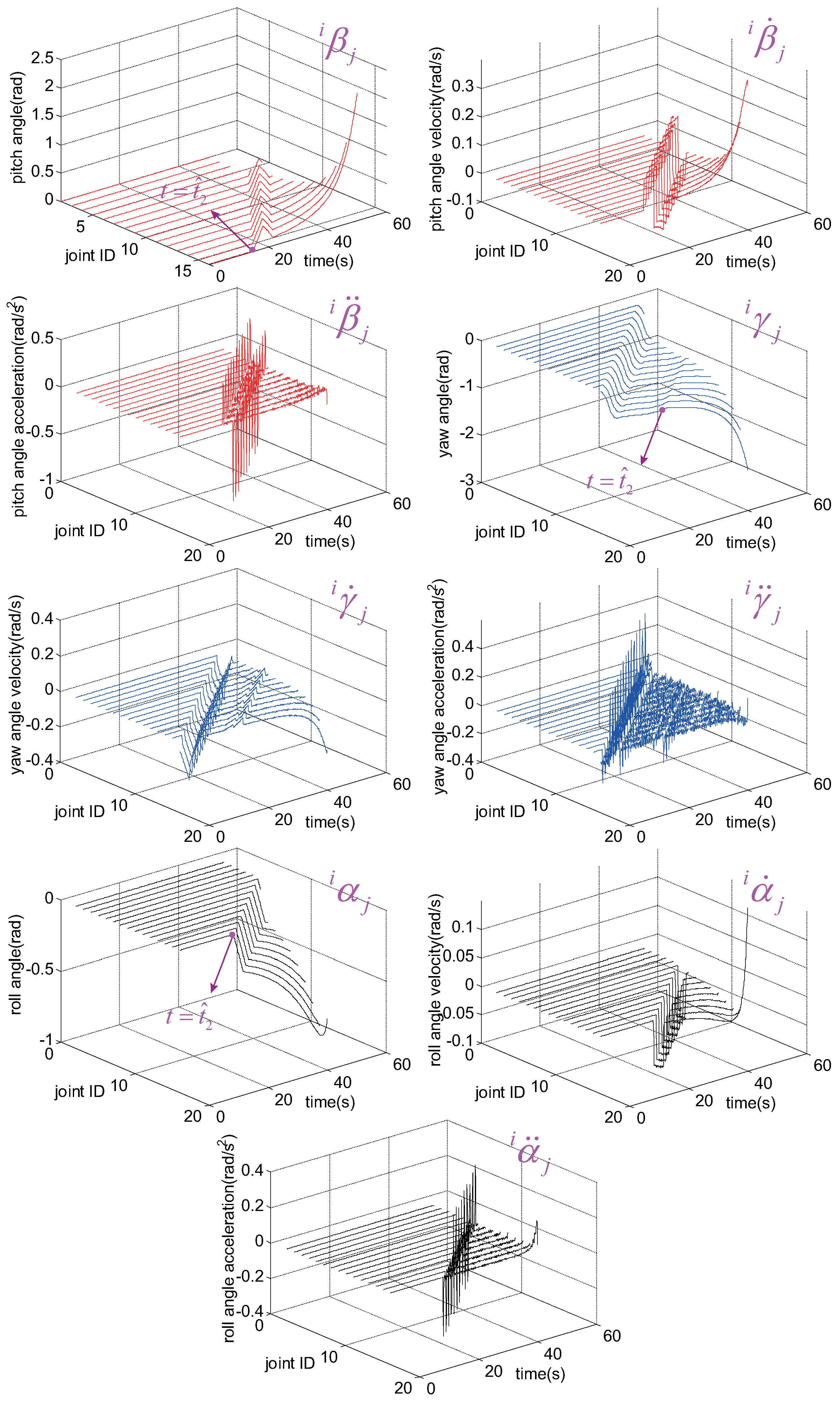
| Yaw angle of joint j at step i | |
| Pitch angle of joint j at step i | |
| Roll angle of joint j at step i | |
| Yaw angular velocity of joint j at step i | |
| Pitch angular velocity of joint j at step i | |
| Roll angular velocity of joint j at step i | |
| Yaw angular acceleration of joint j at step i | |
| Pitch angular acceleration of joint j at step i | |
| Roll angular acceleration of joint j at step i | |
| Head-raising motion time | |
| Orientation matrix of link j with respect to the reference coordinate at step i | |
| Orientation matrix of link j with respect to at step i | |
| Matrix involving vector rotating around the x axis | |
| Matrix involving vector rotating around the y axis | |
| Matrix involving vector rotating around the z axis |
References
- Transeth, A.A.; Pettersen, K.Y.; Liljebäck, P. A survey on snake robot modeling and locomotion. Robotica 2009, 27, 999–1015. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. A review on modelling, implementation, and control of snake robots. Robot. Auton. Syst. 2012, 60, 29–40. [Google Scholar] [Green Version]
- Liu, J.; Wang, Y.; Li, B.; Ma, S. Path planning of a snake-like robot based on serpenoid curve and genetic algorithms. In Proceedings of the 5th World Congress on Intelligent Control and Automation, Hangzhou, China, 15–19 June 2004; pp. 4860–4864. [Google Scholar]
- Saito, M.; Fukaya, M.; Iwasaki, T. Serpentine locomotion with robotic snakes. IEEE Control Syst. Mag. 2002, 22, 64–81. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Ma, S.; Li, B. Analysis of traveling wave locomotion of snake robot. In Proceedings of the 2003 IEEE International Conference on Robotics, Intelligent Systems and Signal Processing, Changsha, China, 8–13 October 2003; pp. 365–369. [Google Scholar]
- Kalani, H.; Akbarzadeh, A.; Safehian, J. Traveling wave locomotion of snake robot along symmetrical and unsymmetrical body shapes. In Proceedings of the 41st International Symposium on Robotics and 6th German Conference on Robotics, Munich, Germany, 7–9 June 2010; pp. 62–68. [Google Scholar]
- Liu, J.; Wang, Y.; Li, B.; Chen, L.; Ma, S. Serpentine locomotion with robotic snakes. Chin. J. Mech. Eng. 2005, 41, 108–113. [Google Scholar] [CrossRef]
- Virgala, I.; Dovica, M.; Kelemen, M.; Prada, E.; Bobovsky. Snake robot movement in the pipe using concertina locomotion. Jixie Gongcheng Xuebao/Chin. J. Mech. Eng. 2005, 41, 108–113. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Ma, S.; Li, B. Study of lateral locomotion of snake robot. Robot 2003, 25, 246–249. [Google Scholar]
- Tanev, I.; Ray, T.; Buller, A. Evolution, robustness, and adaptation of sidewinding locomotion of simulated snake-like robot. In Genetic and Evolutionary Computation Conference; Springer: Berlin, Germany, 2004; pp. 627–639. [Google Scholar]
- Wang, K.; Gao, W.; Ma, S. Snake-like robot with fusion gait for high environmental adaptability: Design, modeling, and experiment. Appl. Sci. 2017, 7, 1133. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Study of lateral locomotion of snake robot. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef]
- Ye, C.; Ma, S.; Li, B.; Wang, Y. Head-raising motion of snake-like robots. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; pp. 595–600. [Google Scholar]
- Tanaka, M.; Matsuno, F. Modeling and control of head raising snake robots by using kinematic redundancy. J. Intell. Robot. Syst. 2014, 75, 53–69. [Google Scholar] [CrossRef]
- Cappo, E.A.; Choset, H. Planning end effector trajectories for a serially linked, floating-base robot with changing support polygon. In Proceedings of the 2004 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4038–4043. [Google Scholar]
- Wu, W.; Hong, Y.; Wang, G. Geometrical spline approach to shape control of super redundant planar manipulator. Mach. Tool Hydraul. 2004, 4, 70–72. [Google Scholar]
- Nor, N.M.; Ma, S. Body shape control of a snake-like robot based on phase oscillator network. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics, Shenzhen, China, 12–14 December 2013; pp. 274–279. [Google Scholar]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, O.; Gravdahl, J.T. A control framework for snake robot locomotion based on shape control points interconnected by Bézier curves. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 3111–3118. [Google Scholar]
- Tanaka, M.; Tanaka, K. Shape Control of a snake robot with joint limit and self-collision avoidance. IEEE Trans. Control Syst. Technol. 2017, 25, 1441–1448. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Y.; Ma, S.; Li, B. Shape control of hyper-redundant modularized manipulator using variable structure regular polygon. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 3924–3929. [Google Scholar]
- Chirikjian, G.S.; Burdick, J.W. A modal approach to hyper-redundant manipulator kinematics. IEEE Trans. Robot. Autom. 1994, 10, 343–354. [Google Scholar] [CrossRef] [Green Version]
- Burdick, J.W.; Radford, J.; Chirikjian, G.S. A “sidewinding” locomotion gait for hyper-redundant robots. Adv. Robot. 1995, 9, 195–216. [Google Scholar] [CrossRef]
- Hatton, R.L.; Choset, H. Generating gaits for snake robots by annealed chain fitting and keyframe wave extraction. Auton. Robot. 2010, 28, 271–281. [Google Scholar] [CrossRef]
- Tavakkoli, S.; Dhande, S.G. Shape synthesis and optimization using intrinsic geometry. J. Mech. Des. 1991, 113, 379–386. [Google Scholar] [CrossRef]
- Mochiyama, H.; Shimemura, E.; Kobayashi, H. Shape control of manipulators with hyper degrees of freedom. Int. J. Robot. Res. 1999, 18, 584–600. [Google Scholar] [CrossRef]












| Step i | Head (mm) | Index of Head | Yaw Angle (rad) | Pitch Angle (rad) | Roll Angle (rad) |
|---|---|---|---|---|---|
| 1 | (151.8, −12.8, 0) | 15,520 | 0 | 0 | 0 |
| 2 | (151.3, −15.7, 0) | 15,541 | −0.0047 | 0 | 0 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 300 | (57.3, −61.8, 188.1) | 22,544 | −0.8964 | 0.2259 | −0.3775 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 499 | (−0.546, 0.015, 606.7) | 31,174 | −2.5001 | 2.1308 | −0.8348 |
| 500 | (−0.0036, −0.003, 609.4) | 31,230 | −2.5309 | 2.1658 | −0.8225 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, J.; Ju, Z.; Yang, C. Head-Raising of Snake Robots Based on a Predefined Spiral Curve Method. Appl. Sci. 2018, 8, 2011. https://doi.org/10.3390/app8112011
Zhang X, Liu J, Ju Z, Yang C. Head-Raising of Snake Robots Based on a Predefined Spiral Curve Method. Applied Sciences. 2018; 8(11):2011. https://doi.org/10.3390/app8112011
Chicago/Turabian StyleZhang, Xiaobo, Jinguo Liu, Zhaojie Ju, and Chenguang Yang. 2018. "Head-Raising of Snake Robots Based on a Predefined Spiral Curve Method" Applied Sciences 8, no. 11: 2011. https://doi.org/10.3390/app8112011
APA StyleZhang, X., Liu, J., Ju, Z., & Yang, C. (2018). Head-Raising of Snake Robots Based on a Predefined Spiral Curve Method. Applied Sciences, 8(11), 2011. https://doi.org/10.3390/app8112011