A New Weighting Approach with Application to Ionospheric Delay Constraint for GPS/GALILEO Real-Time Precise Point Positioning


Abstract
:1. Introduction
2. Approach of GPS/GALILEO RT PPP with Ionospheric Constraint
2.1. Function Models of GPS/GALILEO RT PPP
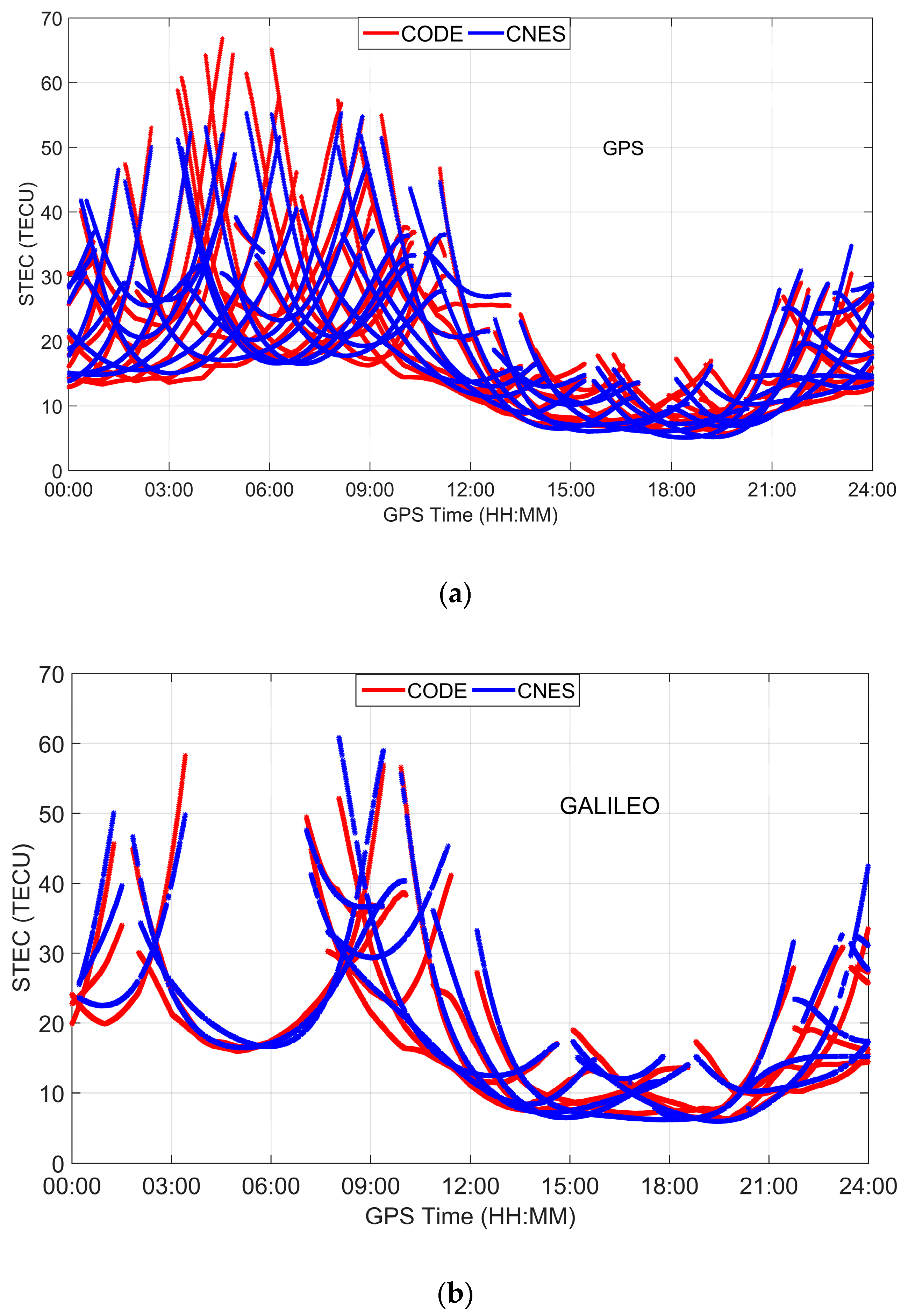
2.2. RT Ionosphere Products and Post-Processing GIM Products
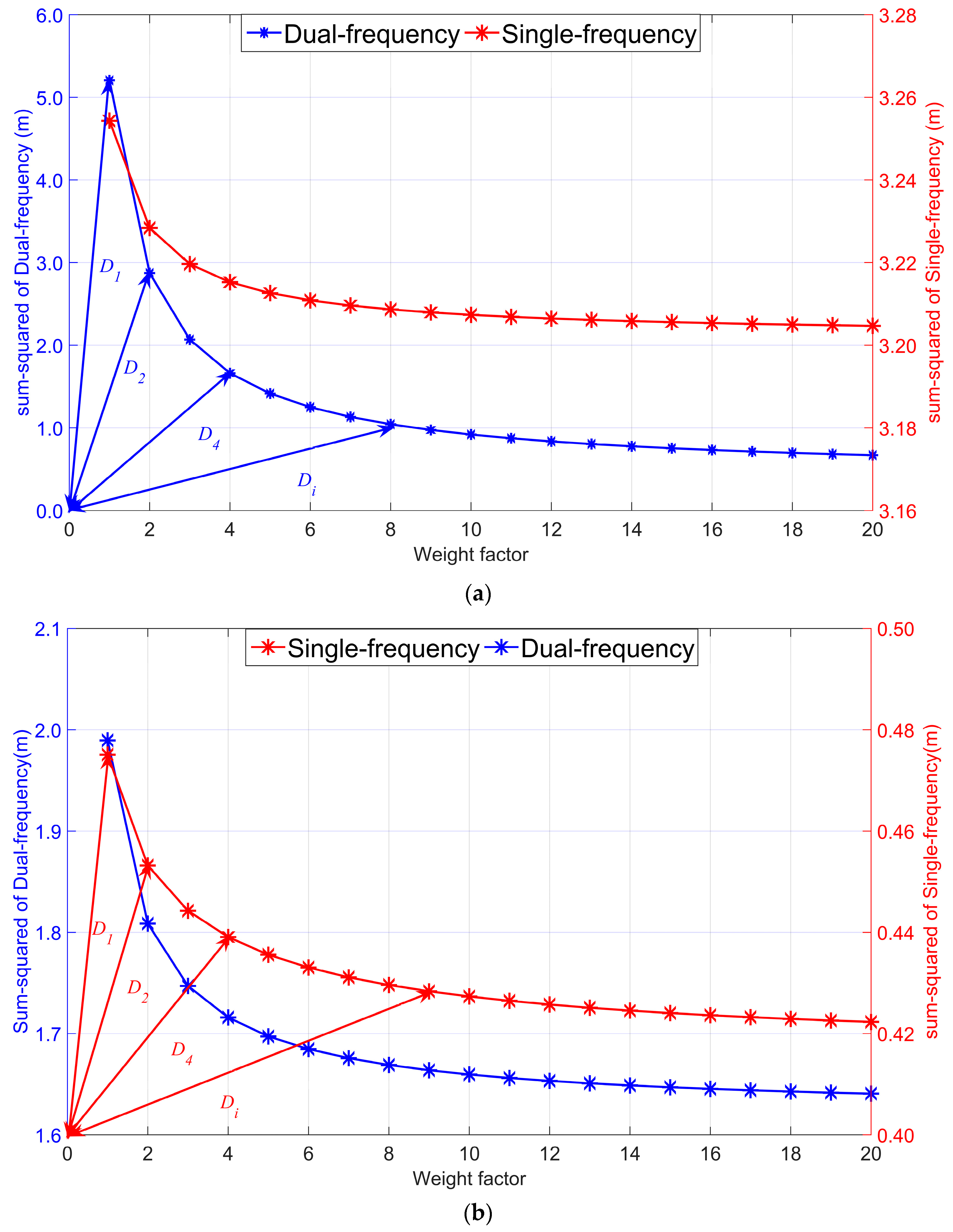
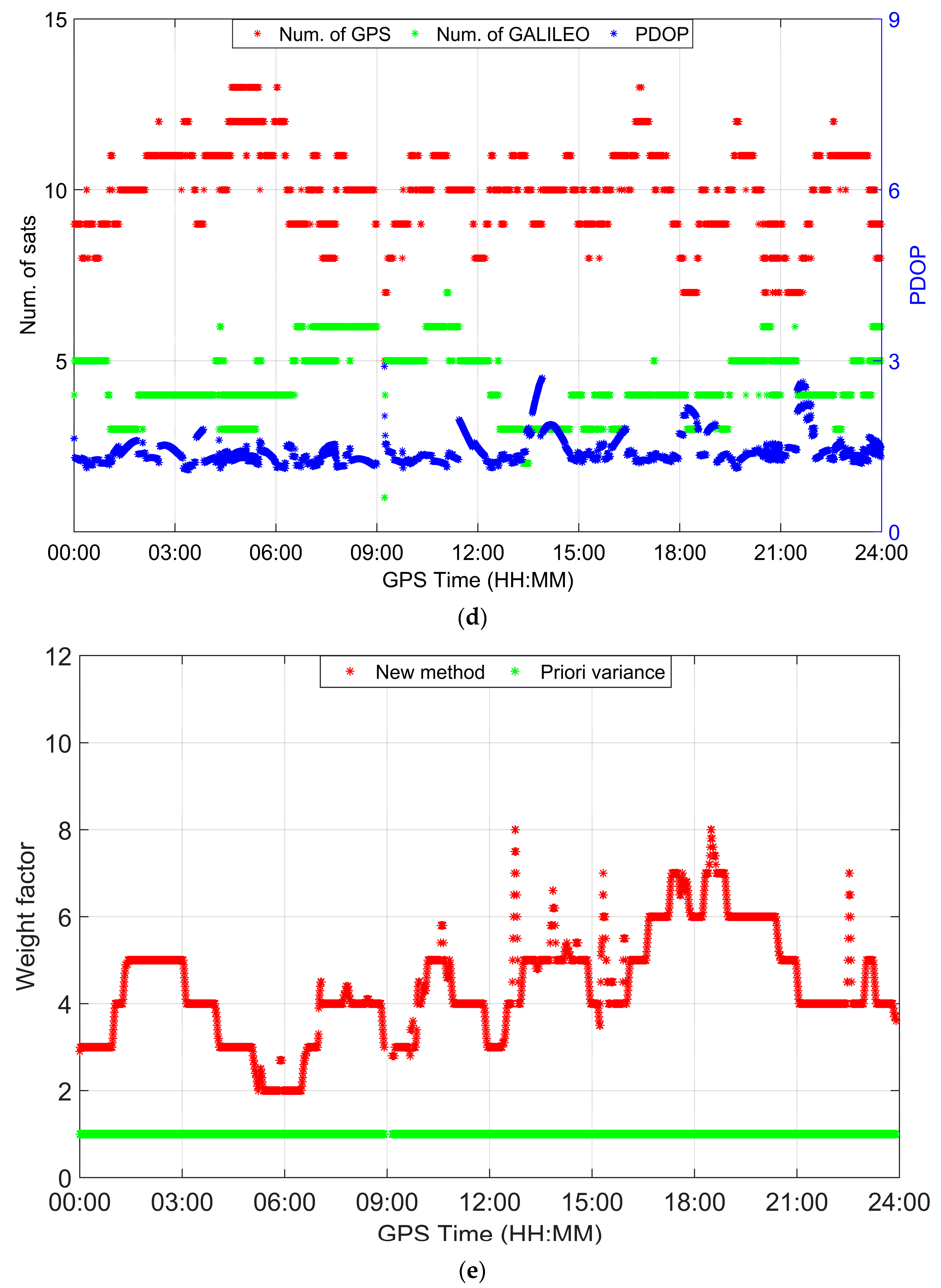
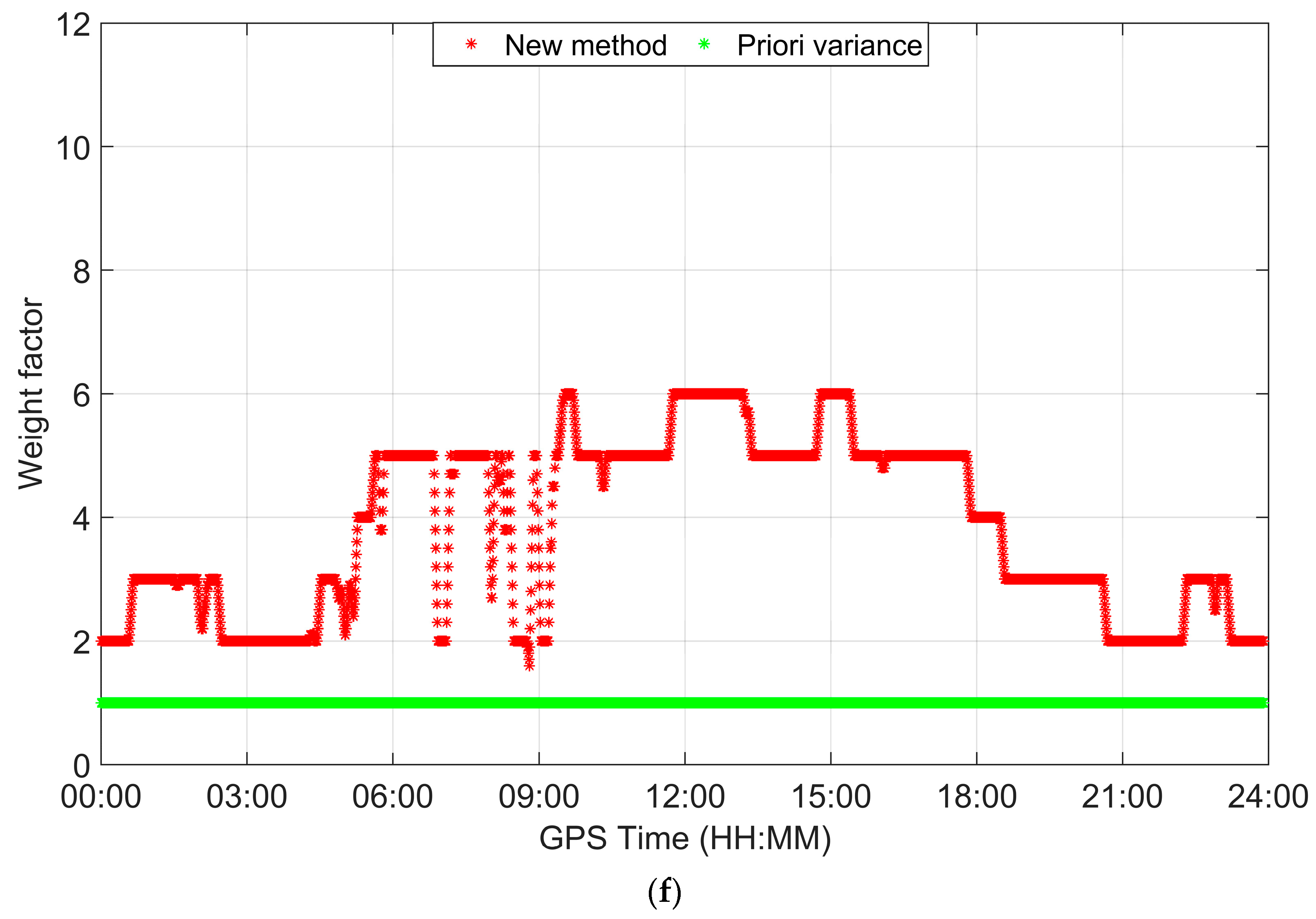
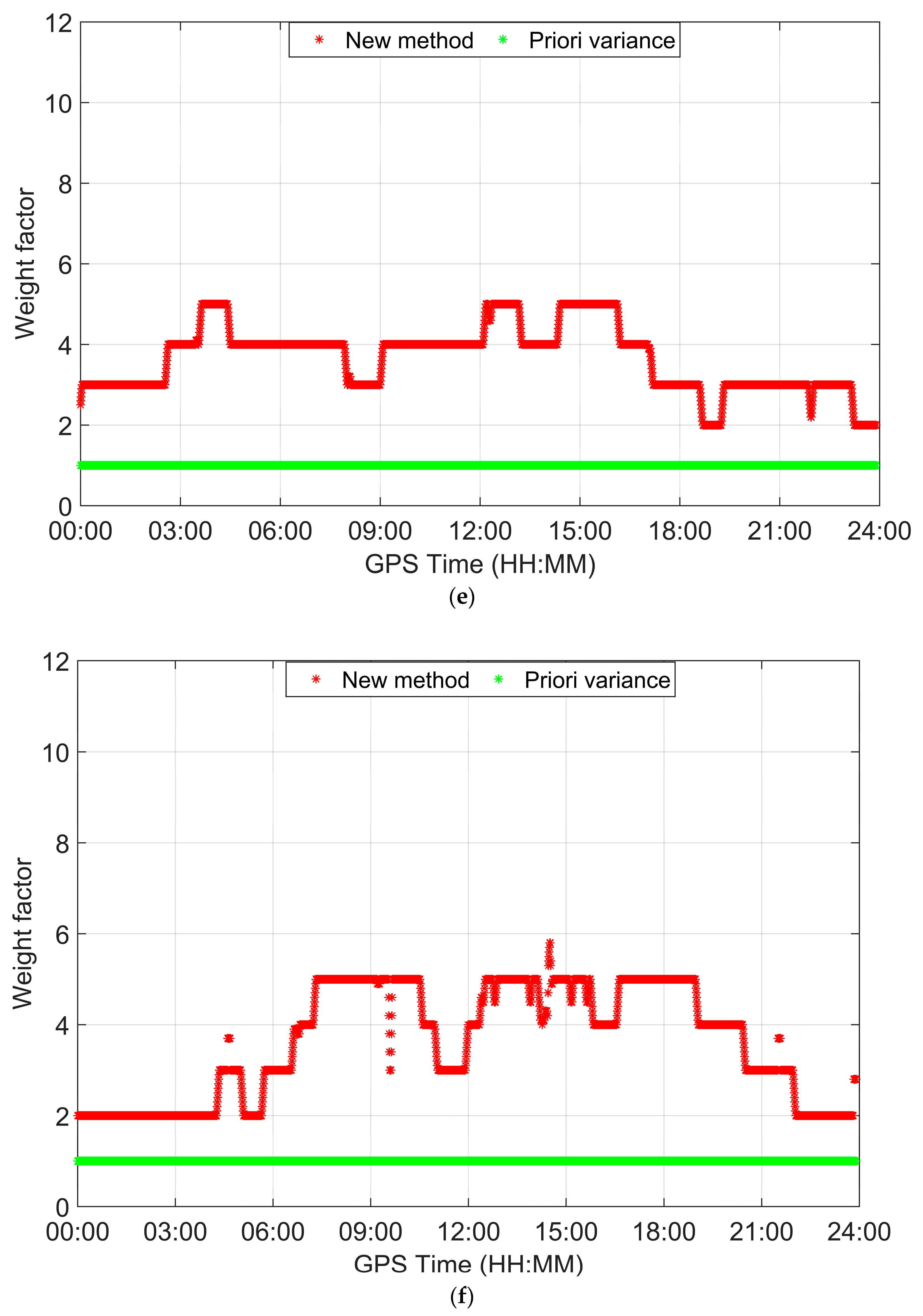
2.3. Weight Factors Searching Algorithm with Moving-Window Average Filter
- (1)
- Assign an initial weight factor () to the variance of ionospheric constraints .
- (2)
- Initialize the variance matrix of measurement errors by using Equation (10) and (11).
- (3)
- Compute post-fit measurement error vector after performing the EKF.
- (4)
- Compute the post-fit weighted sum residuals of squares .
- (5)
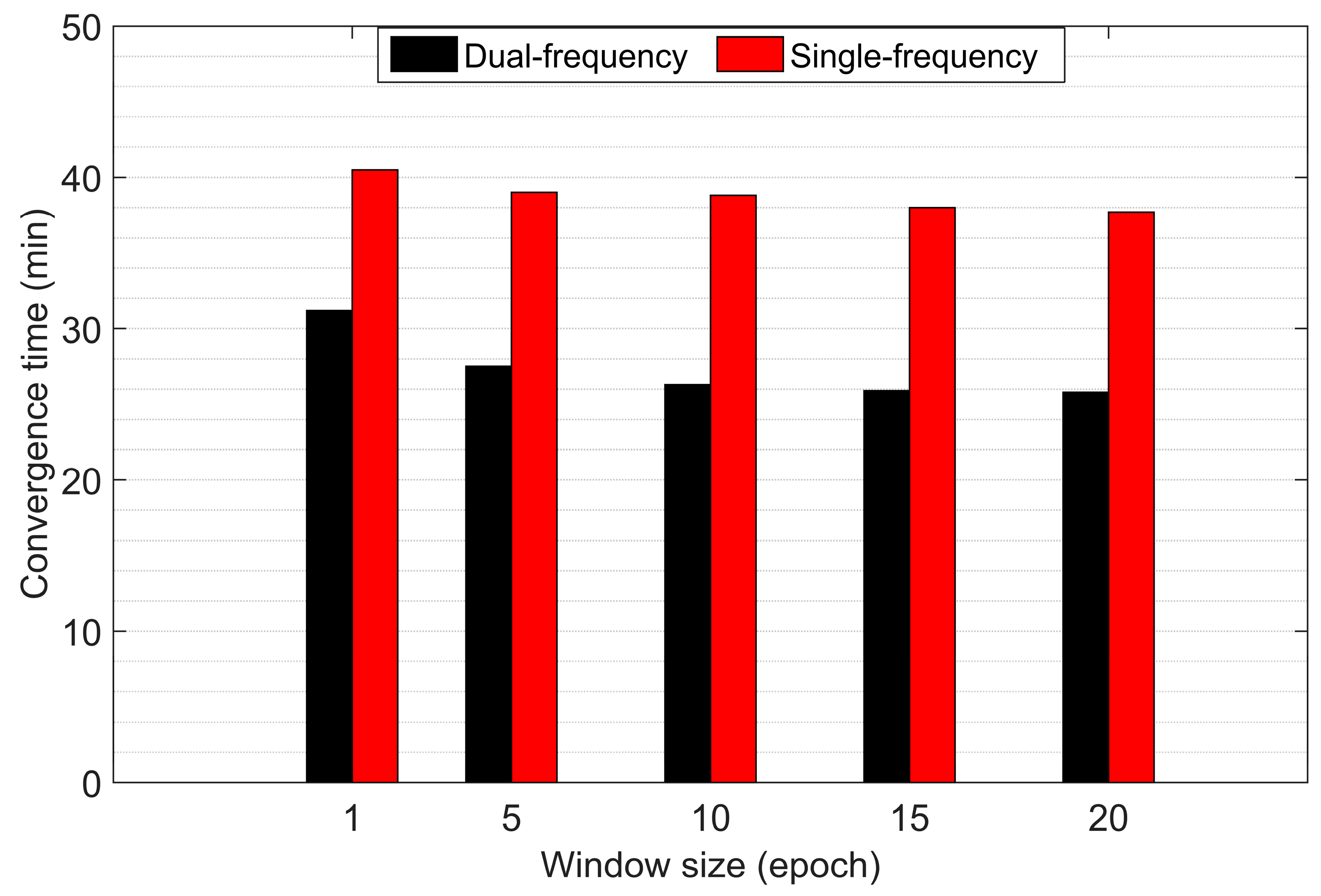
- Update the weight factor , where is a search space, which will be determined through the case studies later in the paper.
3. Results and Analysis
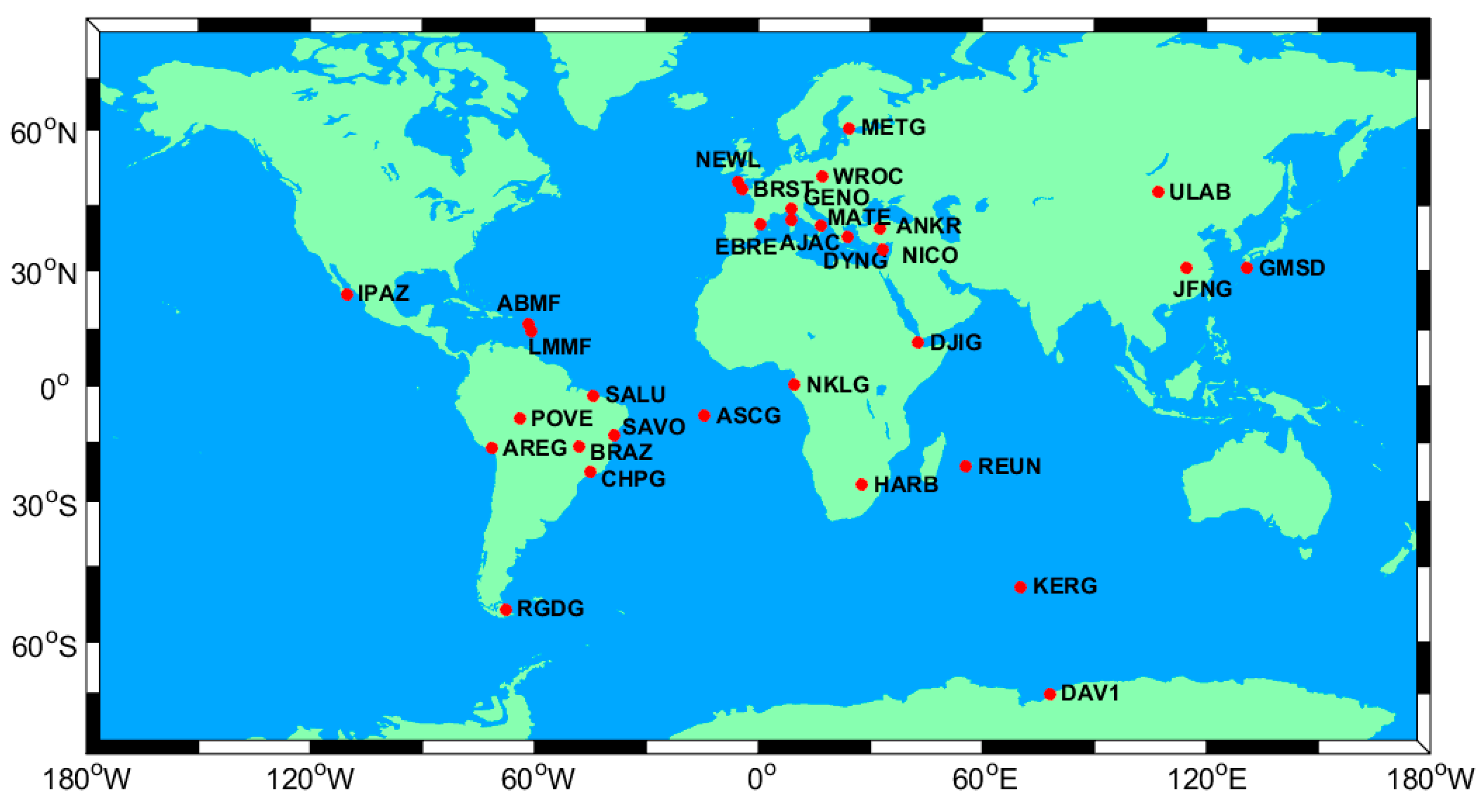
3.1. Data Description and Process Schemes
3.2. Data Processing and Analysis
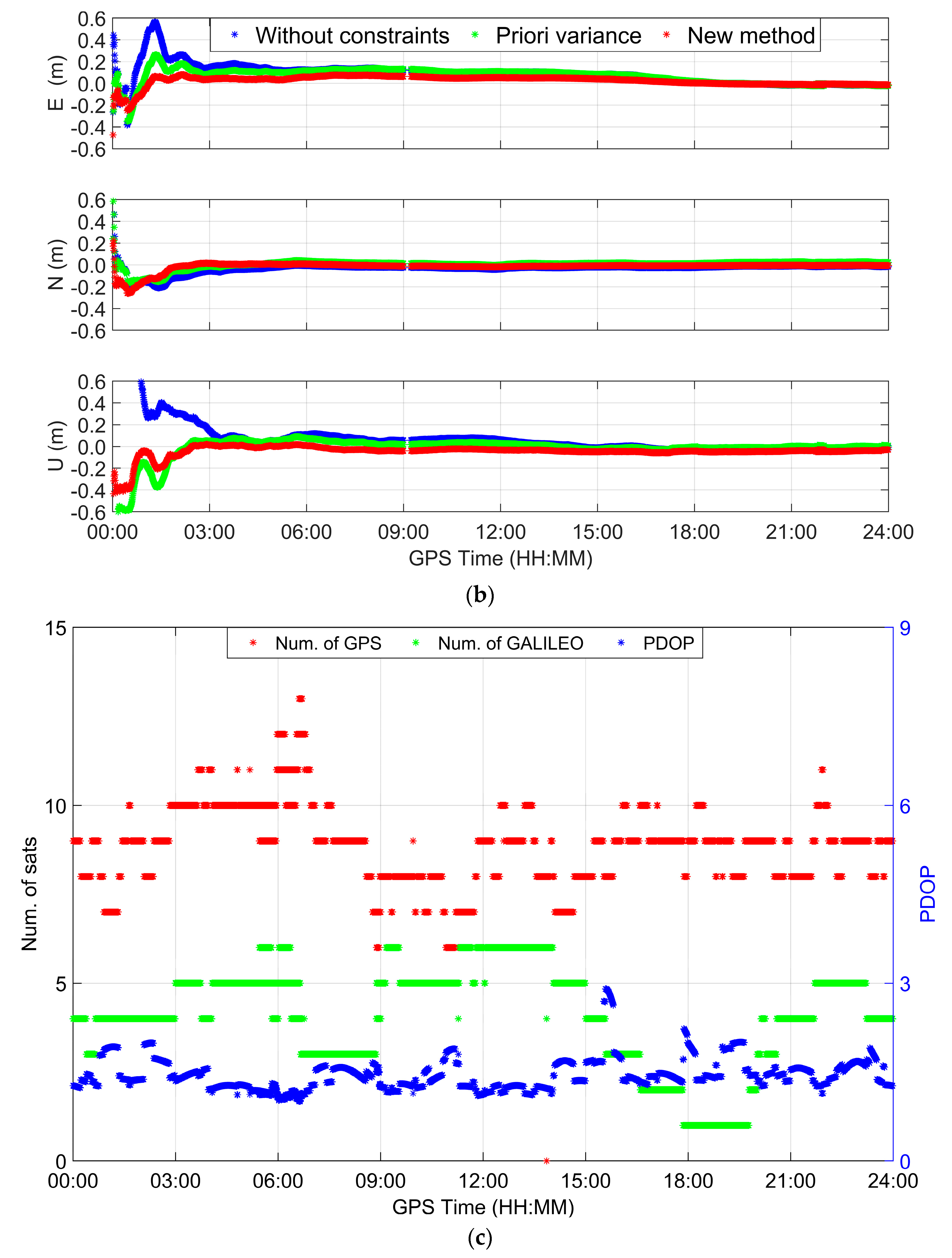
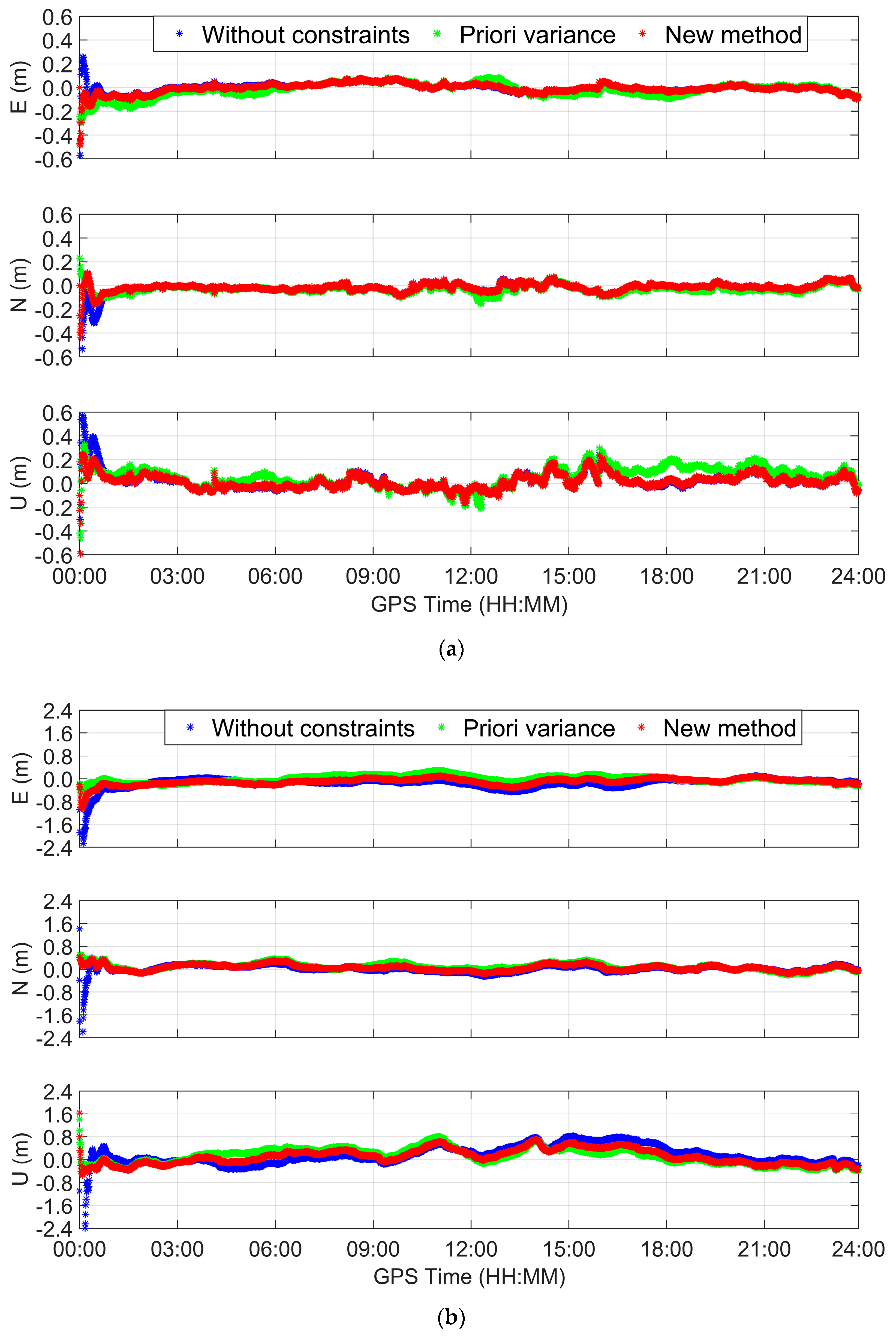
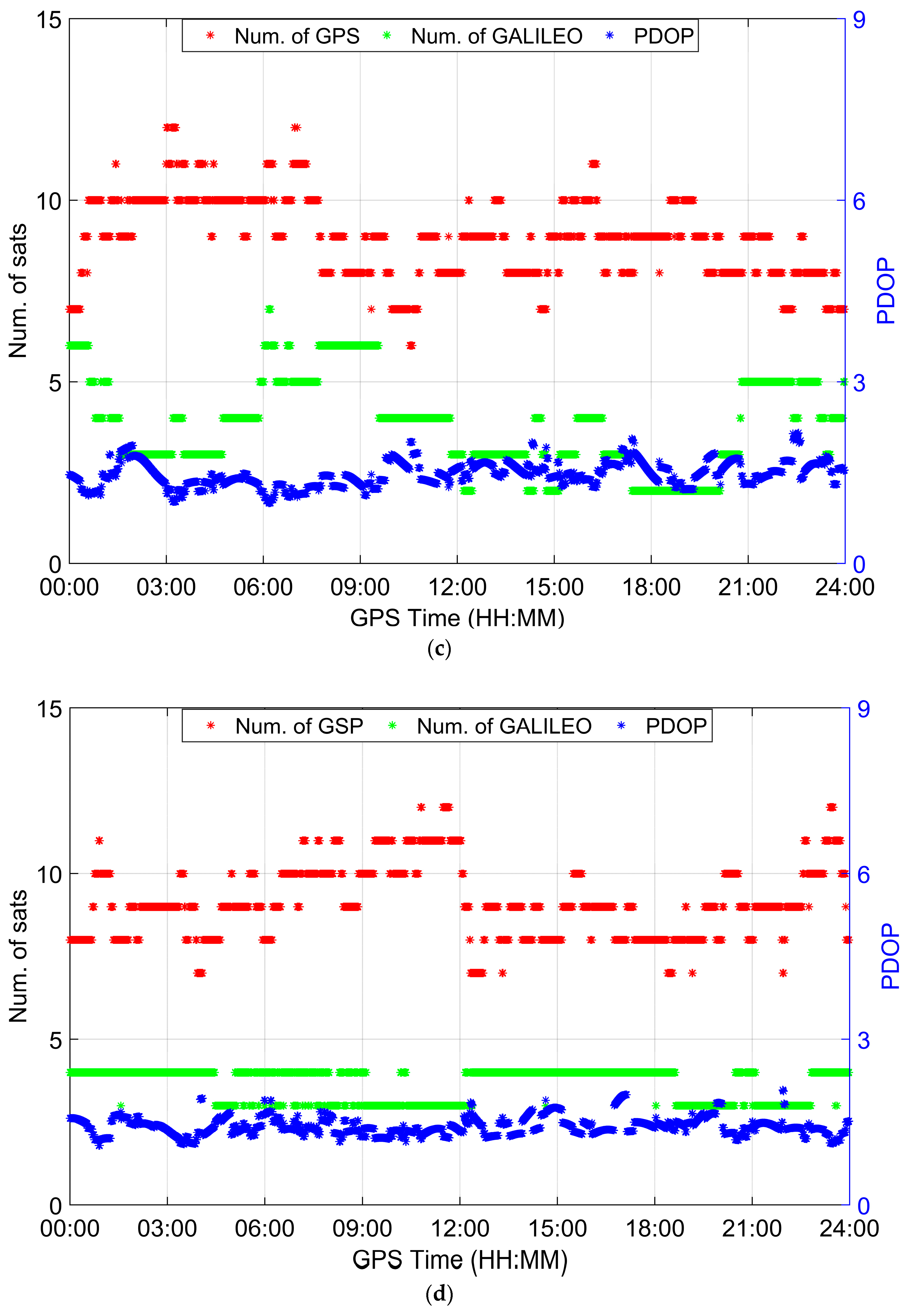
3.2.1. The Static RT PPP with Different Data Processing Methods
3.2.2. The Kinematic RT PPP with Different Data Processing Methods
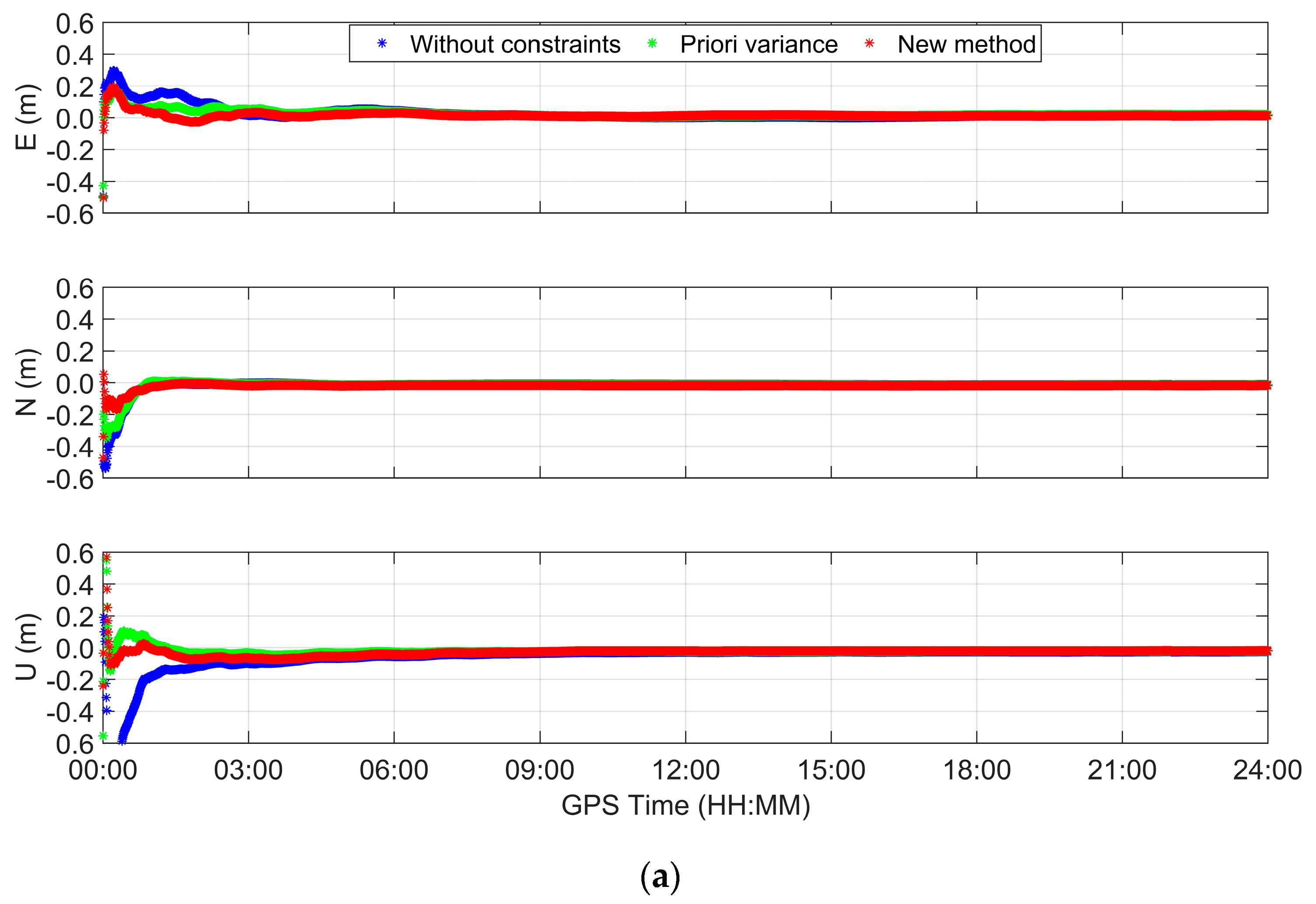
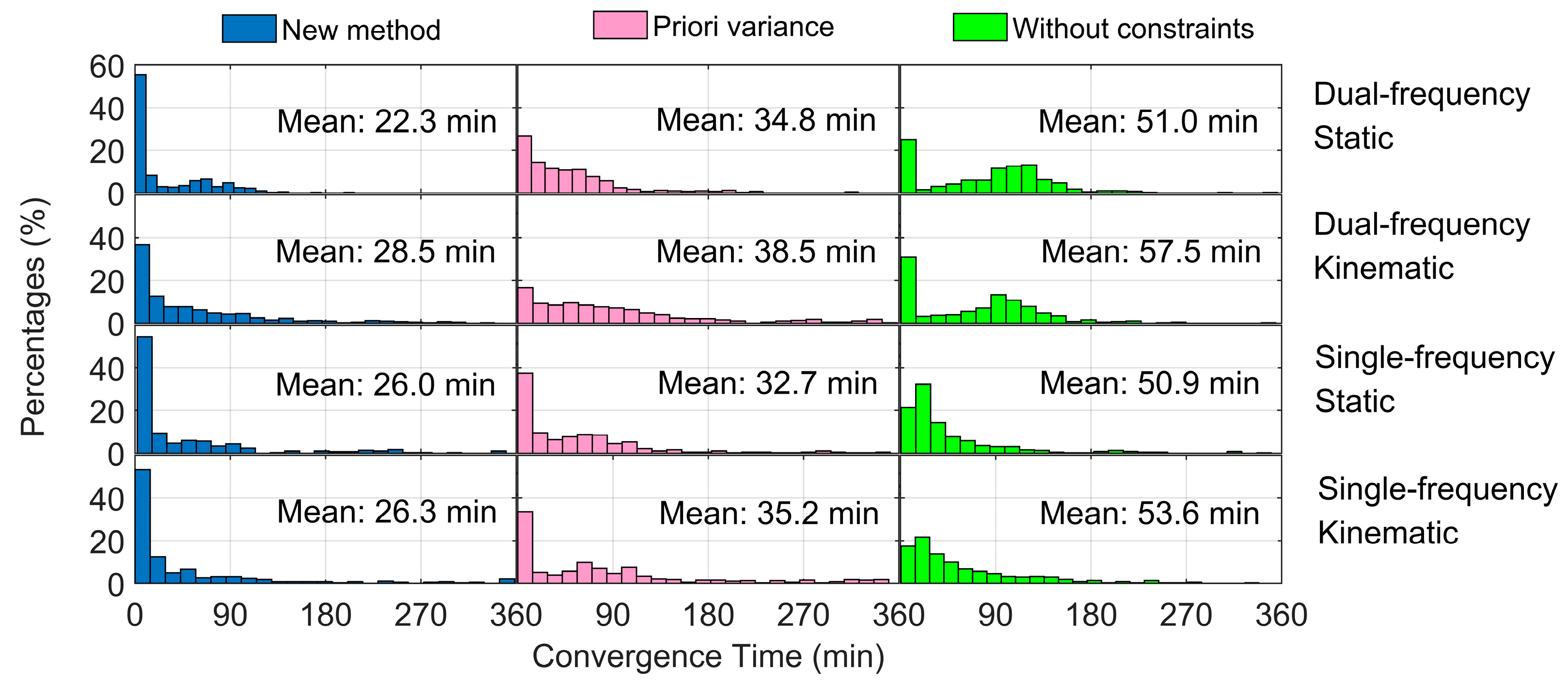
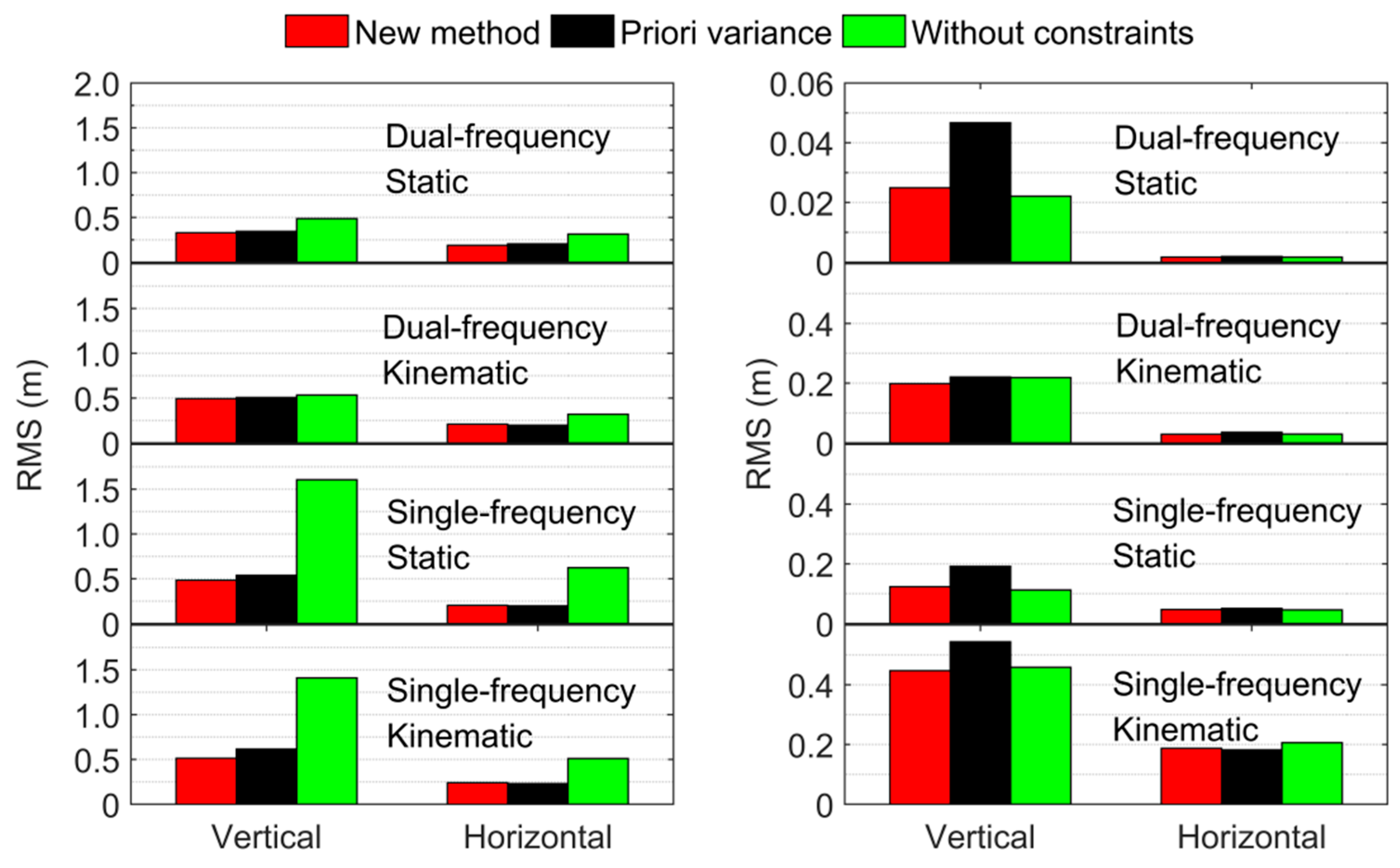
3.2.3. Convergence Performance and Positioning Accuracy Assessment
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Junior, O. Definition and Implementation of a New Service for Precise GNSS Positioning; UNESP: Sao Paulo, Brazil, 2018. [Google Scholar]
- Abdi, N.; Ardalan, A.A.; Karimi, R.; Rezvani, M.-H. Performance assessment of multi-GNSS real-time PPP over Iran. Adv. Space Res. 2017, 59, 2870–2879. [Google Scholar] [CrossRef]
- Laurichesse, D.; Privat, A. An open-source PPP client implementation for the CNES PPP-WIZARD demonstrator. In Proceedings of the ION GNSS+ 2015, Tampa, FL, USA, 14–18 September 2015; pp. 15–18. [Google Scholar]
- Geng, J.; Meng, X.; Dodson, A.H.; Ge, M.; Teferle, F.N. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geod. 2010, 84, 705–714. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.; Xiaohong, Z.; Fei, G. Ambiguity resolved precise point positioning with GPS and BeiDou. J. Geod. 2016, 91, 25–40. [Google Scholar] [CrossRef]
- Laurichesse, D.; Langley, R. Handling the Biases for Improved TripleFrequency PPP Convergence. GPS World 2015, 26, 49–54. [Google Scholar]
- Li, X.; Ge, M.; Zhang, H.; Nischan, T.; Wickert, J. The GFZ real-time GNSS precise positioning service system and its adaption for COMPASS. Adv. Space Res. 2013, 51, 1008–1018. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2012, 17, 223–236. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2015, 20, 849–862. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Li, W.; Teunissen, P.; Zhang, B.; Verhagen, S. Precise Point Positioning Using GPS and Compass Observations. In Proceedings of the China Satellite Navigation Conference (CSNC) 2013 Proceedings, Wuhan, China, 15–17 May 2013; pp. 367–378. [Google Scholar] [CrossRef]
- Zhang, H.; Hao, J.; Xie, J. The Weight Matrix Determination of Ionospheric Delay Constraintfor MultiGNSS Precise Point Positioning Using Raw Observations. Acta Geod. Cartogr. Sin. 2018, 47, 308–315. [Google Scholar] [CrossRef]
- Juan, J.M.; Hernández-Pajares, M.; Sanz, J.; Ramos-Bosch, P.; Aragon-Angel, A.; Orus, R. Enhanced Precise Point Positioning for GNSS Users. IEEE Trans. Geosci. Remote 2012, 50, 4213–4222. [Google Scholar] [CrossRef]
- RTCM Standard 10403.2. Differential GNSS (Global Navigation Satellite Systems) Services-Version 3; Radio Technical Commission for Maritime Services: Arlington, VA, USA, 2013. [Google Scholar]
- Schaer, S. IONEX: The ionosphere Map EXchange Format Version 1. In Proceedings of the Igs Analysis Center Workshop, Darmstadt, Germany, 9–11 February 1998. [Google Scholar]
- Cai, C.; Gong, Y.; Gao, Y.; Kuang, C. An Approach to Speed up Single-Frequency PPP Convergence with Quad-Constellation GNSS and GIM. Sensors 2017, 17, 1302. [Google Scholar] [CrossRef] [PubMed]
- Hernandez-Pajares, M.; Juan, J.M.; Sanz, J.; Ramos-Bosch, P.; Rovira-Garcia, A.; Salazar, D. The ESA/UPC GNSS-Lab tool (gLAB): An advanced multipurpose package for GNSS data processing. In Proceedings of the Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 8–10 December 2011; pp. 1–8. [Google Scholar]
- Gerdan, G.P. A comparison of four methods of weighting double difference pseudorange measurements. Surveyor 1995, 40, 60–66. [Google Scholar] [CrossRef]
- Cai, C.; Pan, L.; Gao, Y. A Precise Weighting Approach with Application to Combined L1/B1 GPS/BeiDou Positioning. J. Navig. 2014, 67, 911–925. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Astrodynamics 1991, 1993, 1647–1660. [Google Scholar]
- Petit, G.; Luzum, B. IERS Conventions. Bureau International des Poids et Mesures Sevres (France). 2010. Available online: https://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36.html (accessed on 1 July 2017).
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res.-Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Teunissen, P. A Comparision of TCAR, CIR and LAMBDA GNSS Ambiguity Resolution. In Proceeding of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 24–27 September 2001; pp. 2799–2808. [Google Scholar]
- Ge, Y.; Zhou, F.; Sun, B.; Wang, S.; Shi, B. The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors 2017, 17, 602. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modes | Details |
|---|---|
| Without constraint | GPS/GALILEO observations without ionospheric constraints |
| Priori variance | GPS/GALILEO observations+ionospheric constraints with a priori variance |
| New method | GPS/GALILEO observations+ionospheric constraints with proposed method |
| Item | Setting |
|---|---|
| Observations | Raw pseudo range and phase observations |
| Frequency | GPS: L1/L2; GALILEO: E1/E5 |
| Estimator | Extended Kalman filter |
| Elevation cutoff | 10° |
| Sampling offset | 30 s |
| Observations weight | Elevation dependent weighting; 0.01 m and 1 m for GPS/GALILEO phase and pseudo range observables in zenith direction; |
| Phase windup | Phase polarization effects applied [21] |
| Attitude law | Nominal attitude for GPS and GALILEO |
| Station displacement | Solid Earth tides, ocean tide loading and pole tides [22] |
| A priori Troposphere delay | Saastamoinen model and Niell mapping function [23] |
| Zenith wet tropospheric delay | Estimated as random walk () |
| Ionosphere | Estimated as random walk processes (); |
| Station coordinate | Estimated as constant/white noise () in static/kinematic modes |
| Receiver clock | Estimated as white noise for each GNSS system |
| Satellite antenna PCO and PCV | PCV and PCO values for GPS/GALILEO were corrected with igs14.atx; |
| Receiver antenna PCO and PCV | Corrected by igs14.atx; Applied the same values as GPS to GALILEO; |
| Phase ambiguities | Float solution [24,25] |
| Frequency | Methods | Convergence Time (min) | E (m) | N (m) | U (m) |
|---|---|---|---|---|---|
| Dual-frequency | Without constraint | 116 (77%) | 0.0033 | 0.0038 | 0.0346 |
| A priori variance | 50 (48%) | 0.0030 | 0.0039 | 0.0349 | |
| New method | 26 | 0.0019 | 0.0038 | 0.0336 | |
| Single-frequency | Without constraint | 106 (65%) | 0.0102 | 0.0748 | 0.0832 |
| A priori variance | 52 (28%) | 0.0129 | 0.0848 | 0.0732 | |
| New method | 37 | 0.0092 | 0.0687 | 0.0514 |
| Frequency | Methods | Convergence Time (min) | E (m) | N (m) | U (m) |
|---|---|---|---|---|---|
| Dul-frequency | Without constraint | 56 (73%) | 0.0682 | 0.0821 | 0.1186 |
| A priori variance | 38 (32%) | 0.0852 | 0.0798 | 0.1634 | |
| New method | 15 | 0.0568 | 0.0825 | 0.1183 | |
| Single-frequency | Without constraint | 61 (67%) | 0.1152 | 0.1007 | 0.3257 |
| A priori variance | 31 (35%) | 0.1655 | 0.1534 | 0.3760 | |
| New method | 20 | 0.1062 | 0.1186 | 0.3009 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Wang, J.; Yu, H.; Cao, X.; Ge, Y. A New Weighting Approach with Application to Ionospheric Delay Constraint for GPS/GALILEO Real-Time Precise Point Positioning. Appl. Sci. 2018, 8, 2537. https://doi.org/10.3390/app8122537
Liu T, Wang J, Yu H, Cao X, Ge Y. A New Weighting Approach with Application to Ionospheric Delay Constraint for GPS/GALILEO Real-Time Precise Point Positioning. Applied Sciences. 2018; 8(12):2537. https://doi.org/10.3390/app8122537
Chicago/Turabian StyleLiu, Tianjun, Jian Wang, Hang Yu, Xinyun Cao, and Yulong Ge. 2018. "A New Weighting Approach with Application to Ionospheric Delay Constraint for GPS/GALILEO Real-Time Precise Point Positioning" Applied Sciences 8, no. 12: 2537. https://doi.org/10.3390/app8122537
APA StyleLiu, T., Wang, J., Yu, H., Cao, X., & Ge, Y. (2018). A New Weighting Approach with Application to Ionospheric Delay Constraint for GPS/GALILEO Real-Time Precise Point Positioning. Applied Sciences, 8(12), 2537. https://doi.org/10.3390/app8122537