Dynamic Relaxation Method for Load Capacity Analysis of Reinforced Concrete Elements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Modeling of Structural Materials
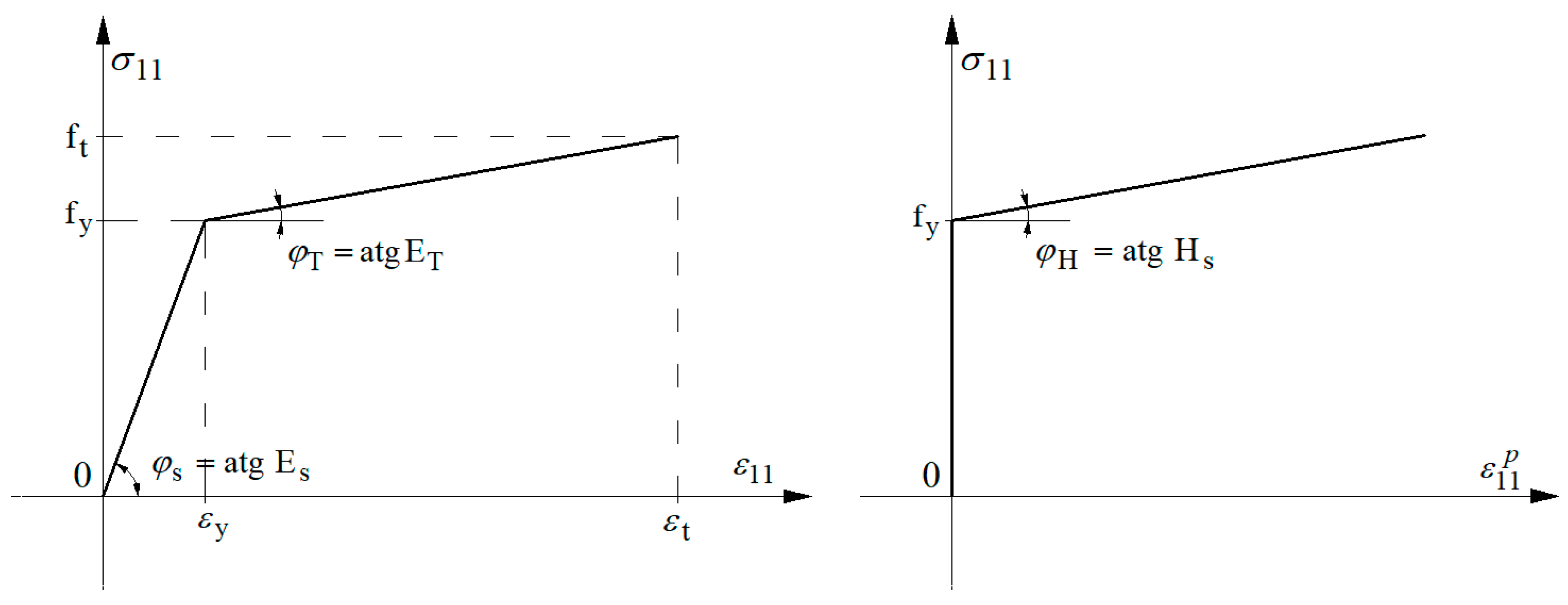
2.1. Reinforcing Steel
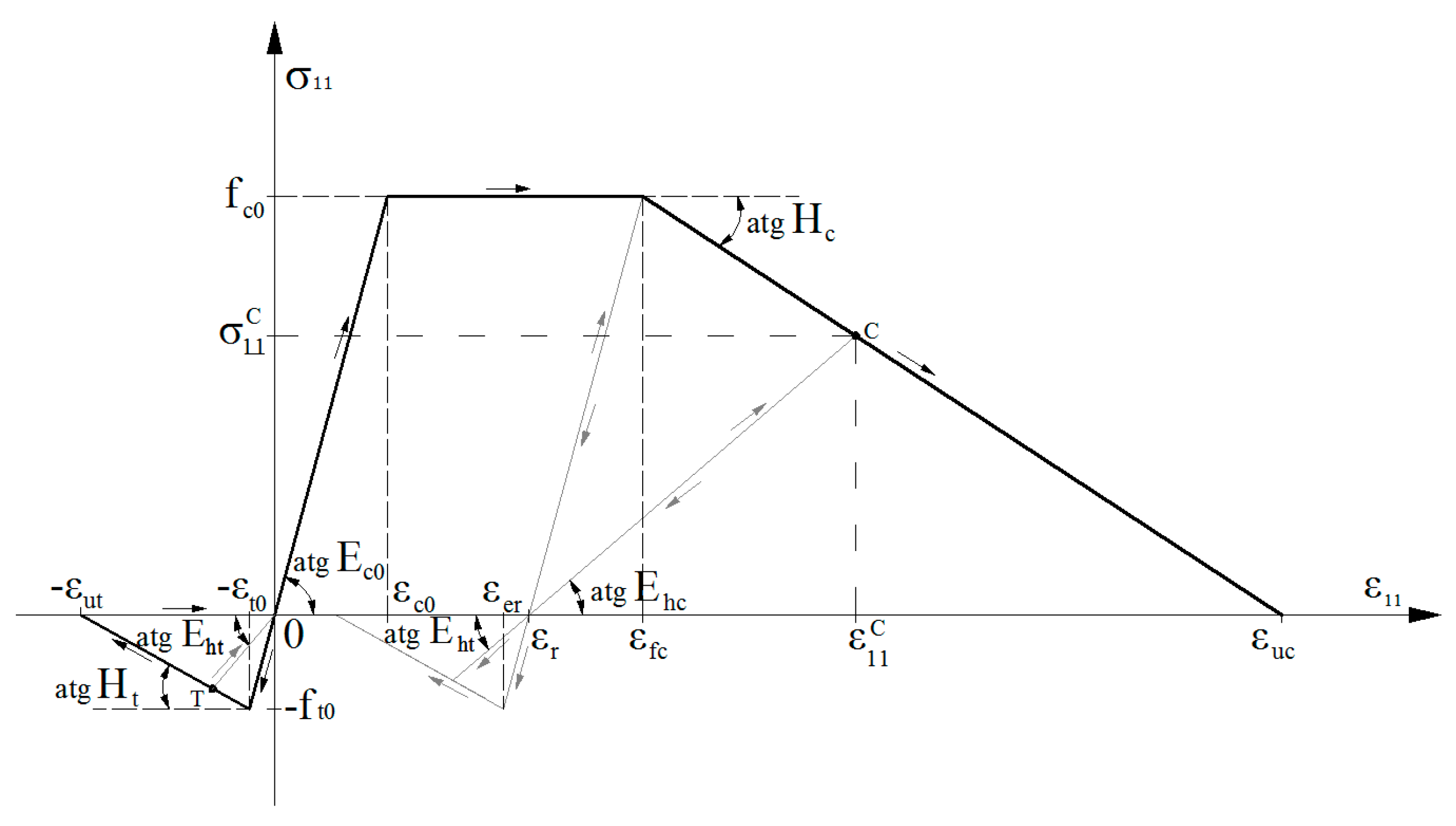
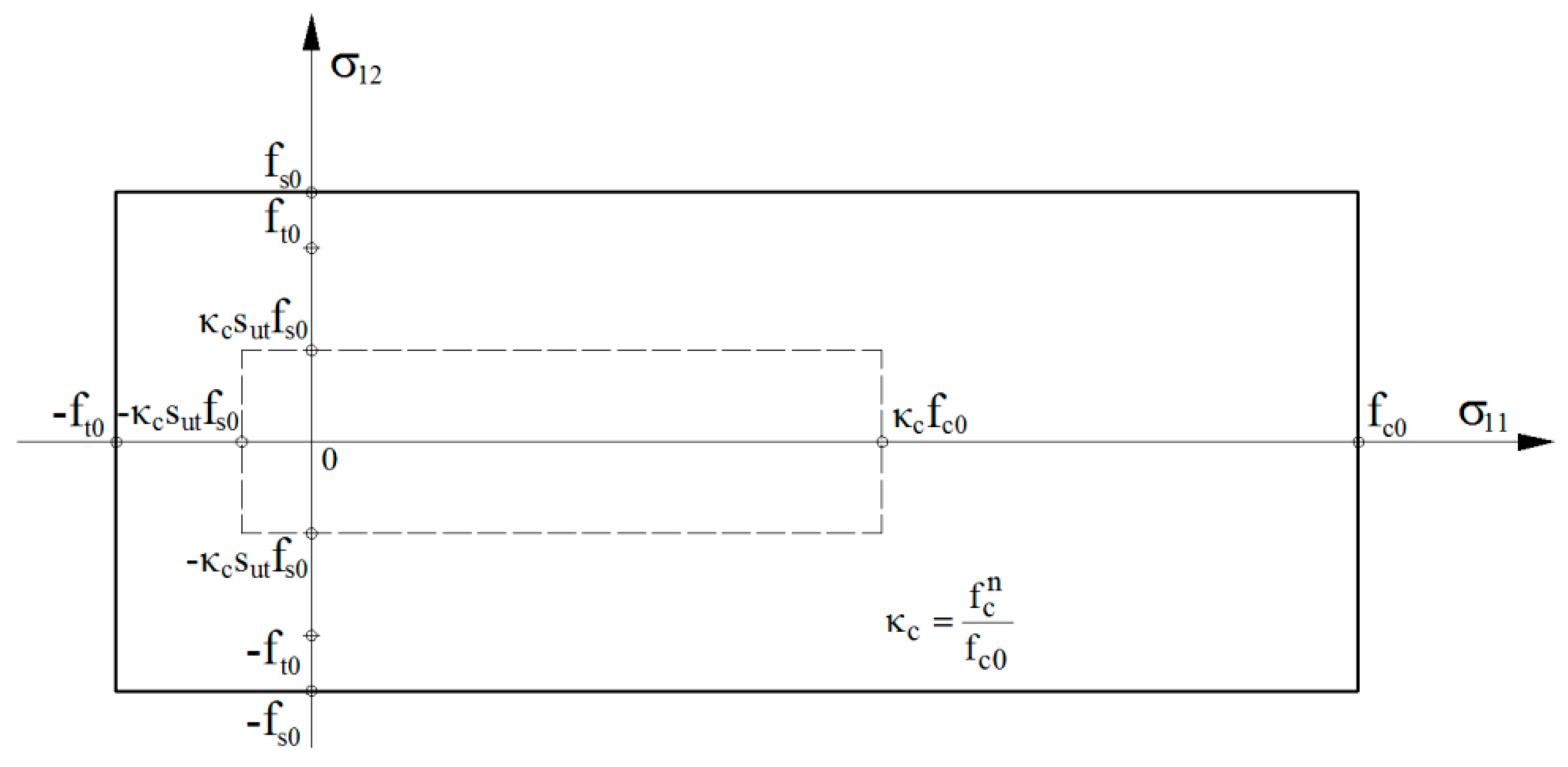
2.2. Concrete
3. Fundamental Equations
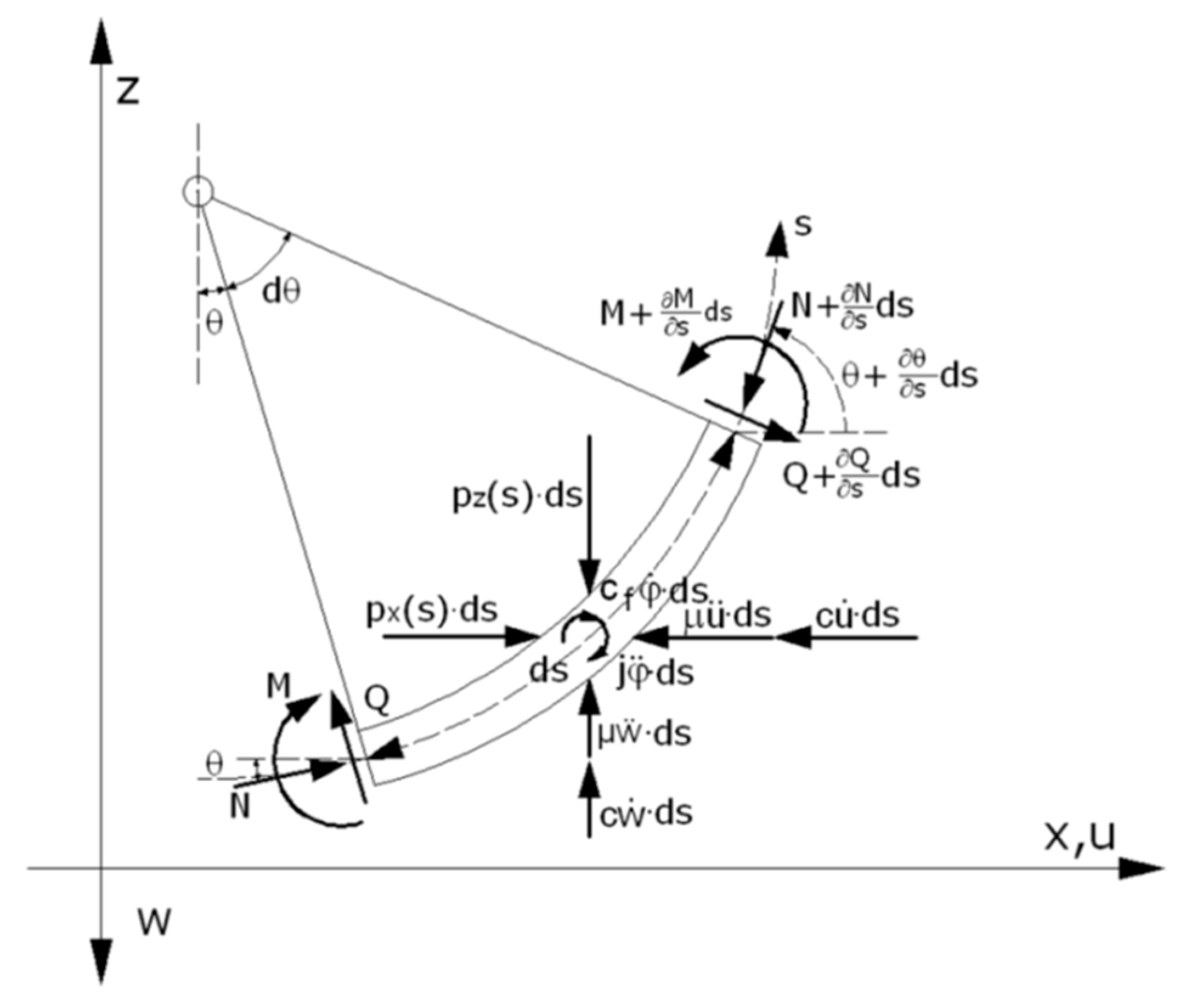
3.1. Equations of Motion
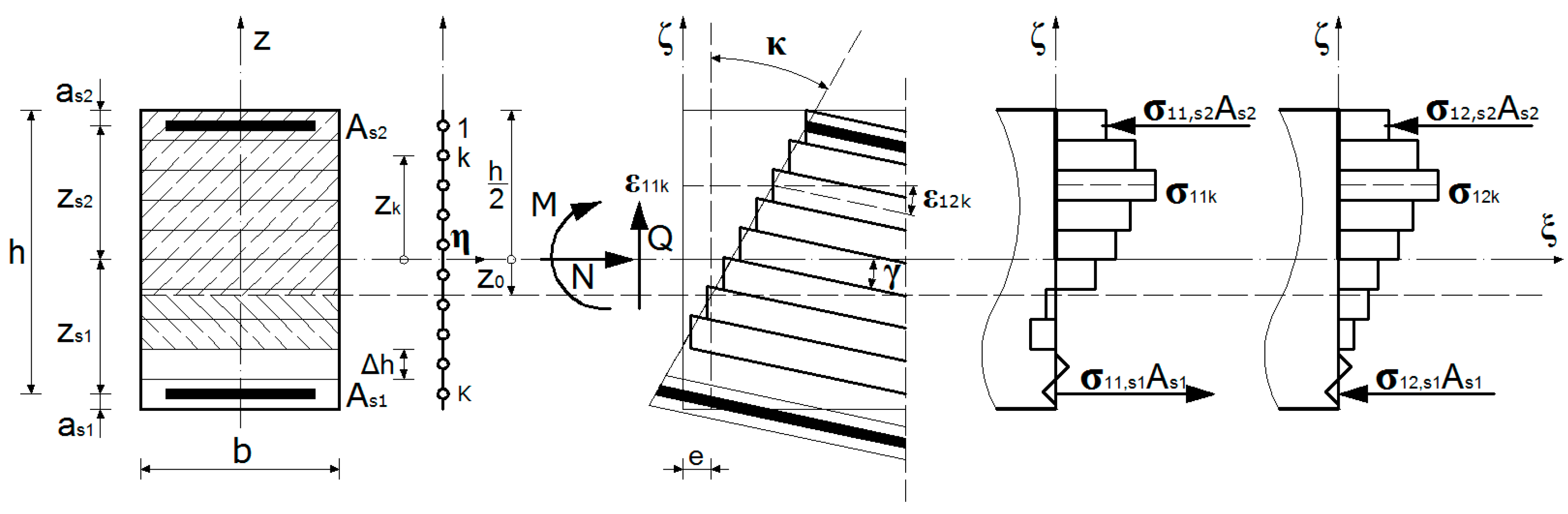
3.2. Equations of Internal Equilibrium in the Cross-Section
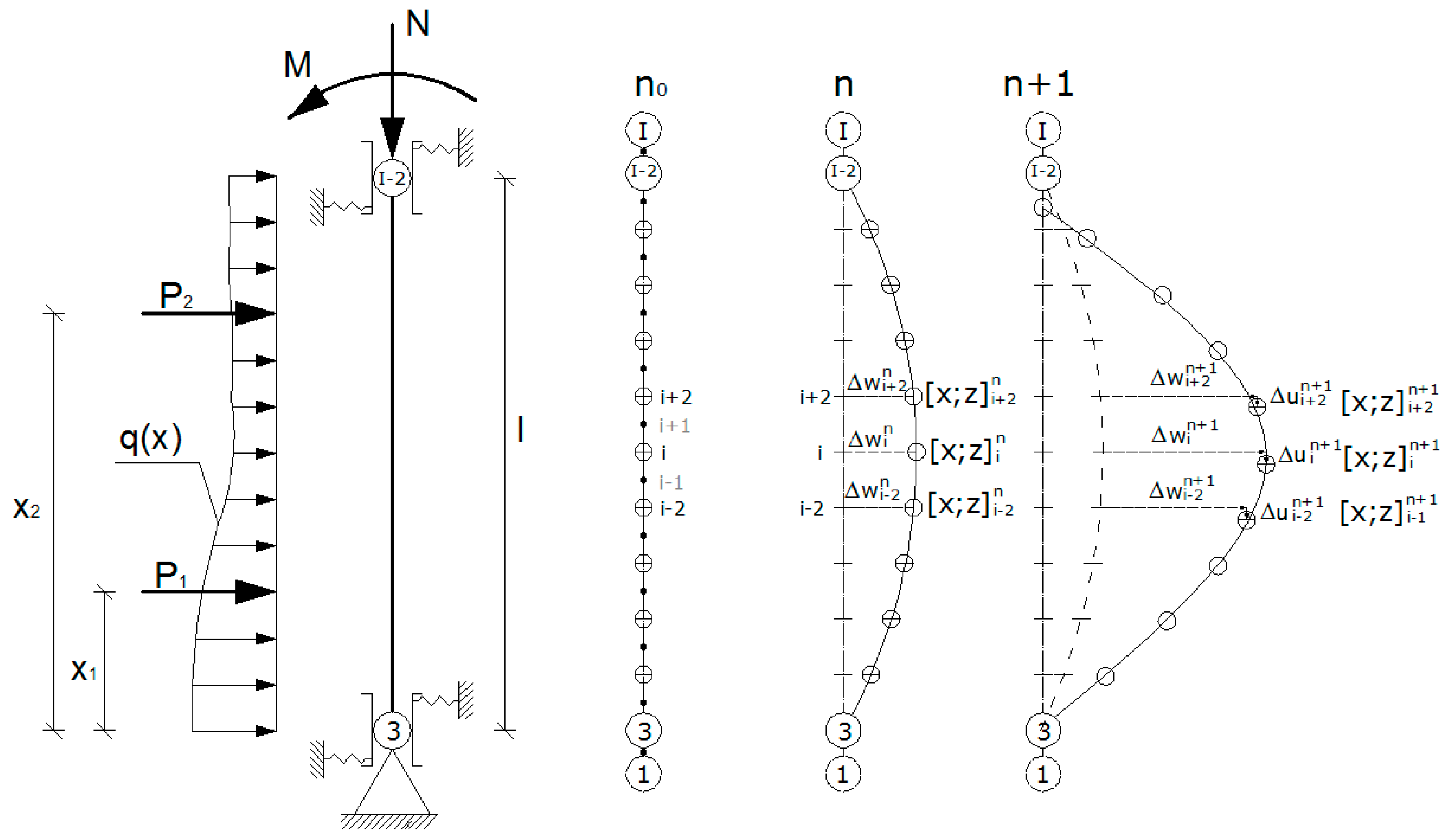
3.3. Differential Discretization of the Bar Element
4. Solution of the System of Equilibrium Equations
4.1. Numerical Solution of Equations of Motion
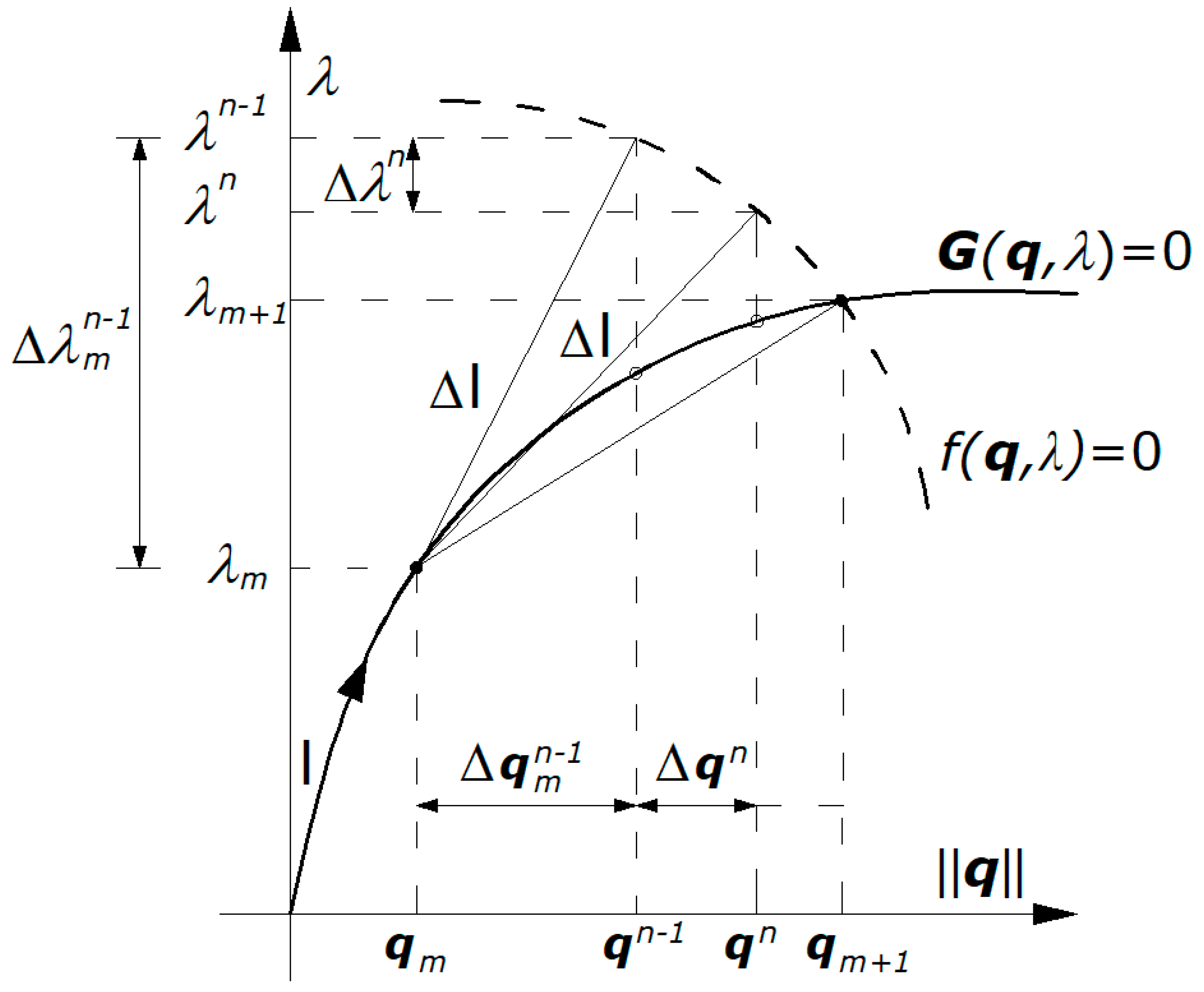
4.2. Conceptual Algorithm for Solving the Extended System of Equations
- Prediction stage —for known initial values established in the previous load step (i.e., , , ), the load parameter is determined using the constraints Equation (31):
- Correction stage —is realized in four iterative steps.
- (a)
- New displacement increments are determined using the system of motion Equations (7).
- (b)
- The load parameter is determined using Equation (13).
- (c)
- The updated displacements vector is calculated, according to: .
- (d)
- The iterations are terminated after reaching a predefined accuracy and then the load and displacement parameters are updated , and the next load step starts from a new prediction stage. If the predefined accuracy is not achieved, then the next correction stage is required.
5. Numerical Results
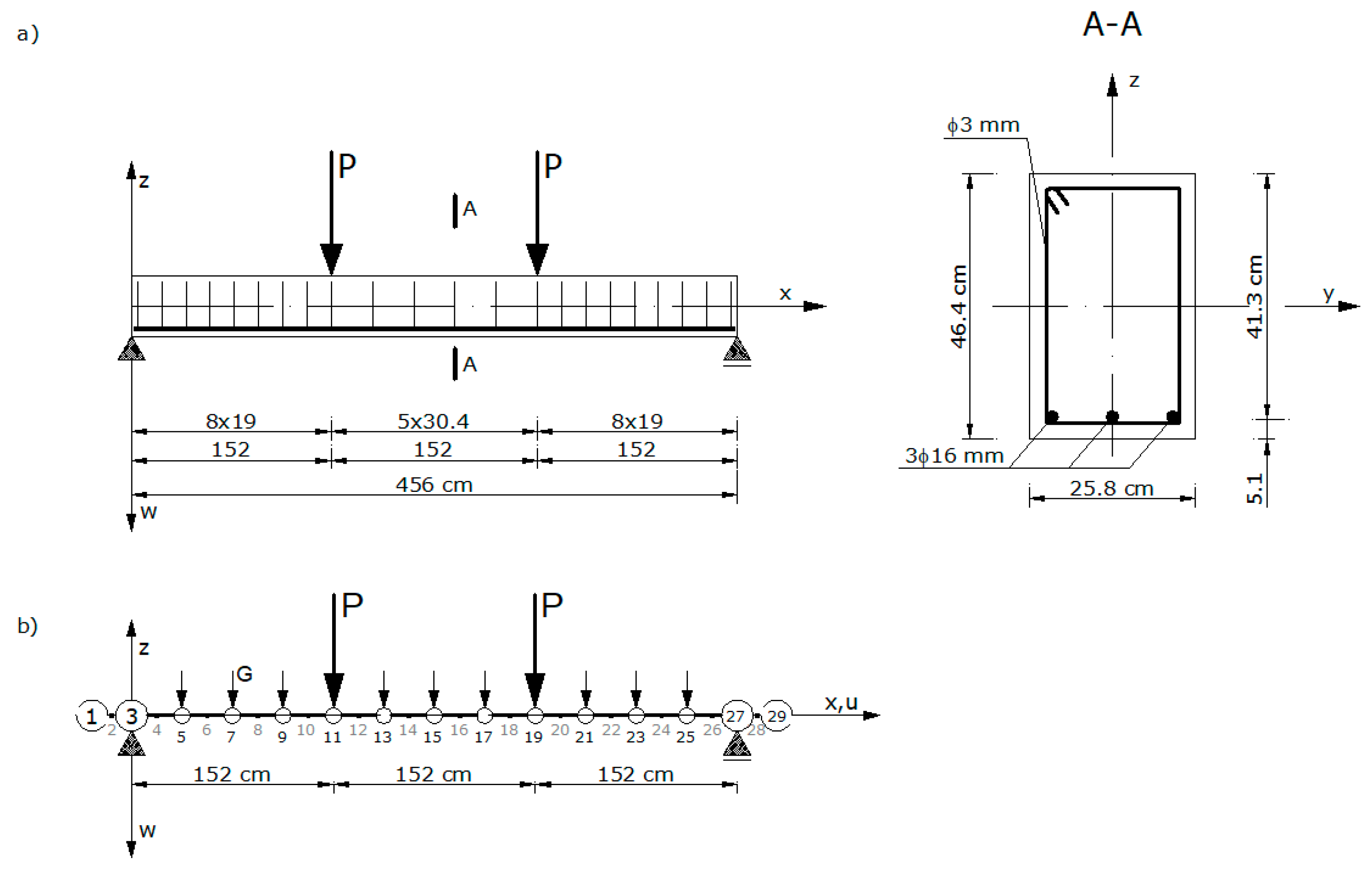
5.1. Reinforced Concrete Beam
5.1.1. Experiment Details
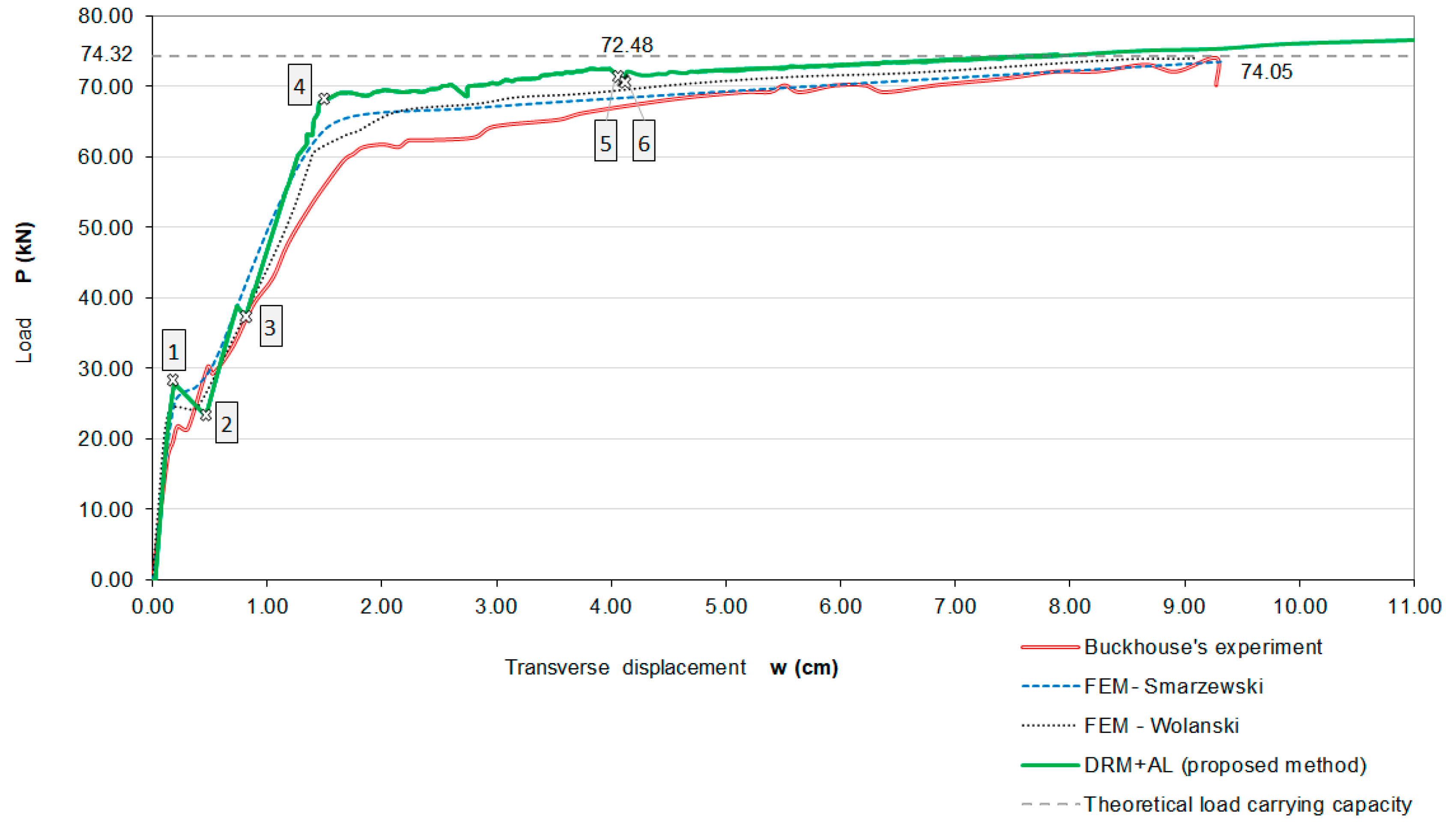
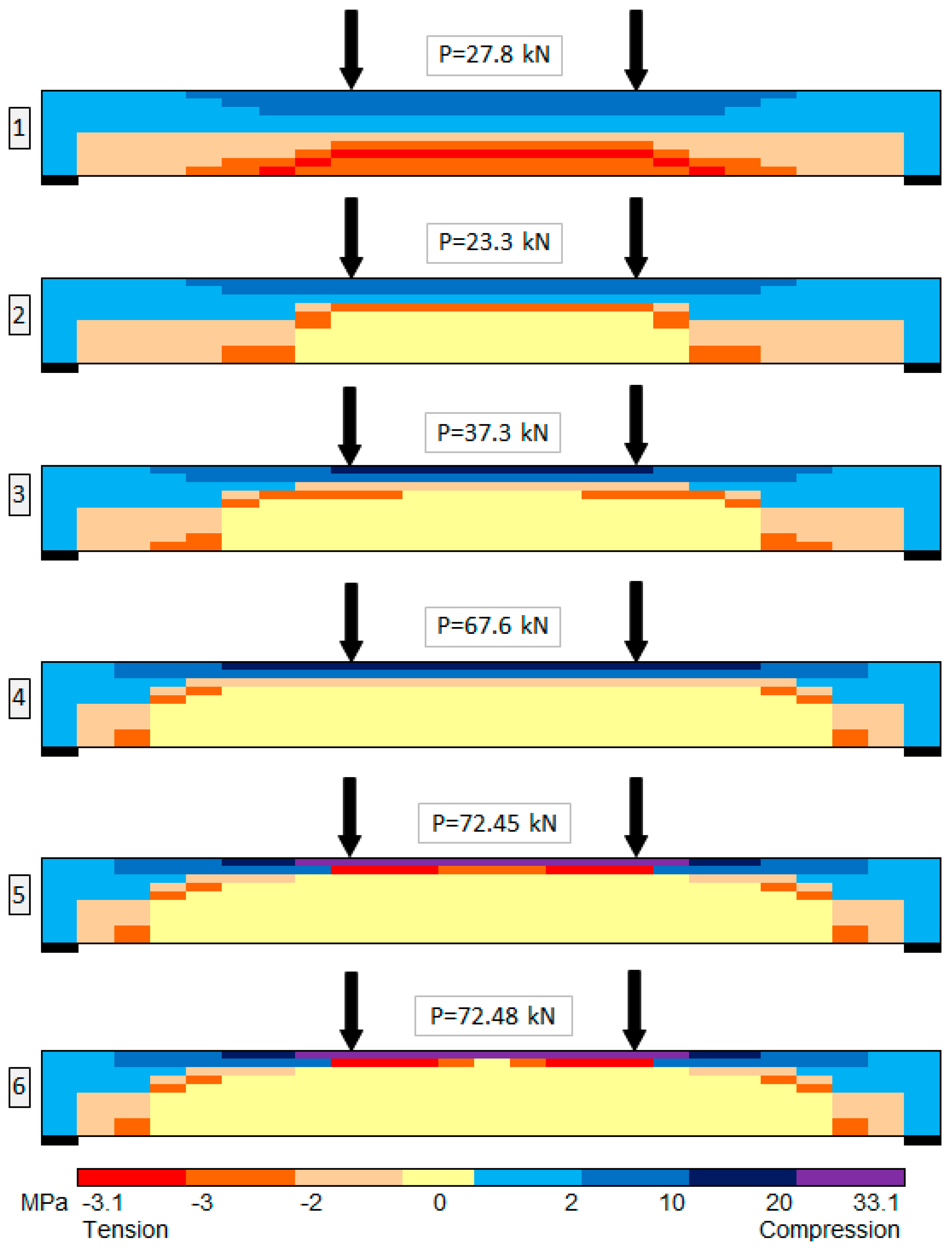
5.1.2. Analysis of the Load-Carrying Capacity and Displacement
5.2. Reinforced Concrete Column
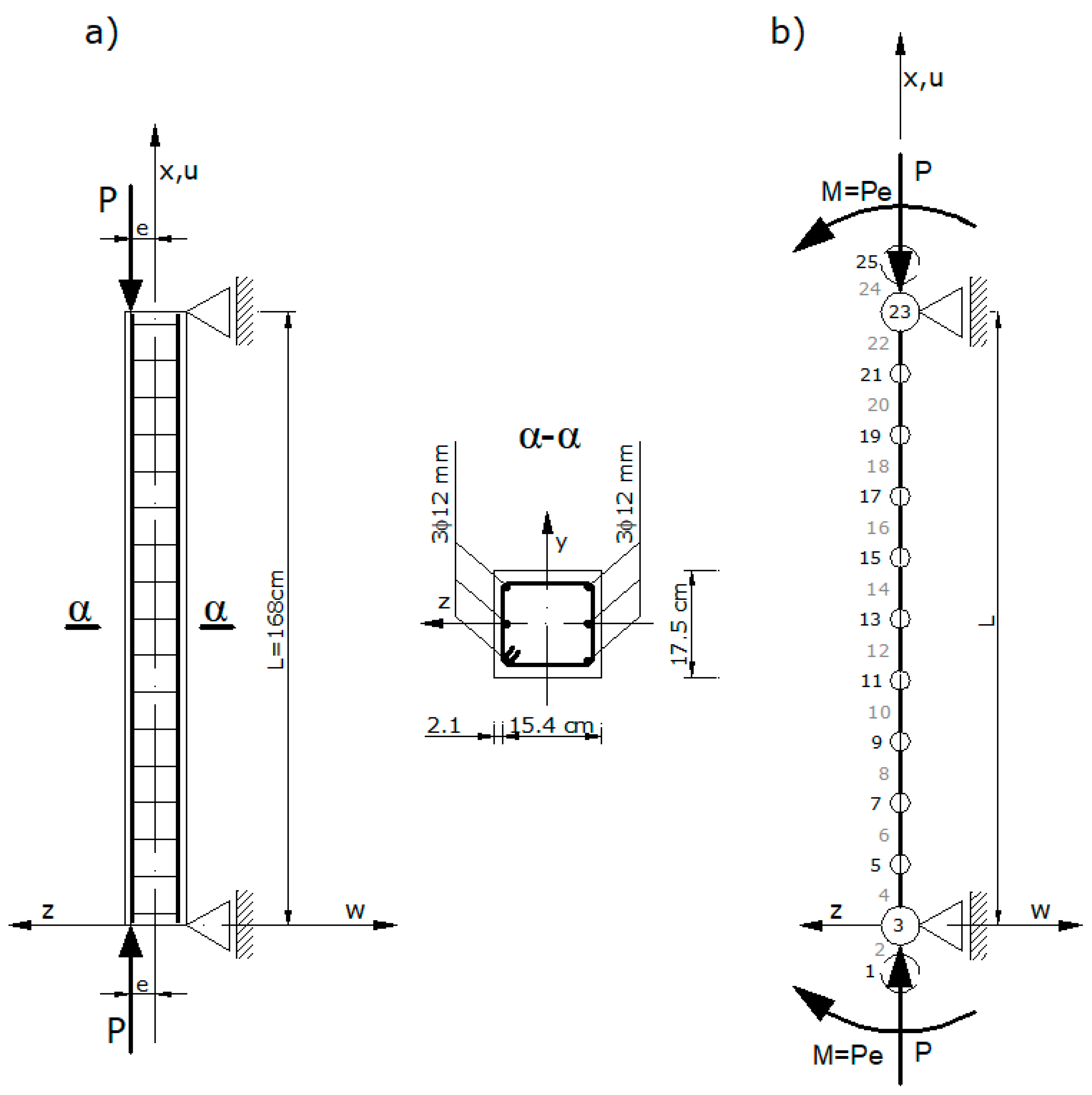
5.2.1. Experiment Details
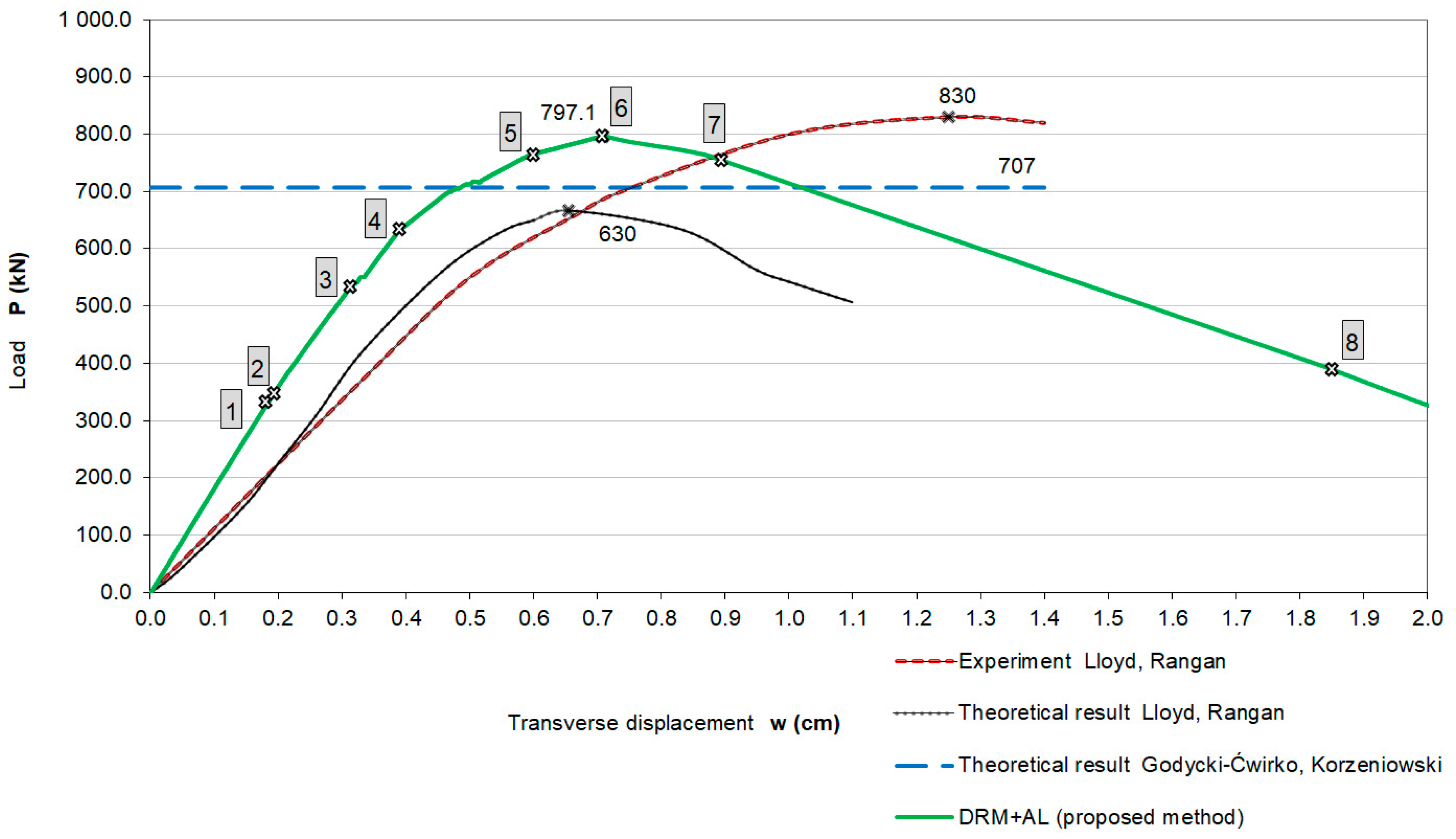
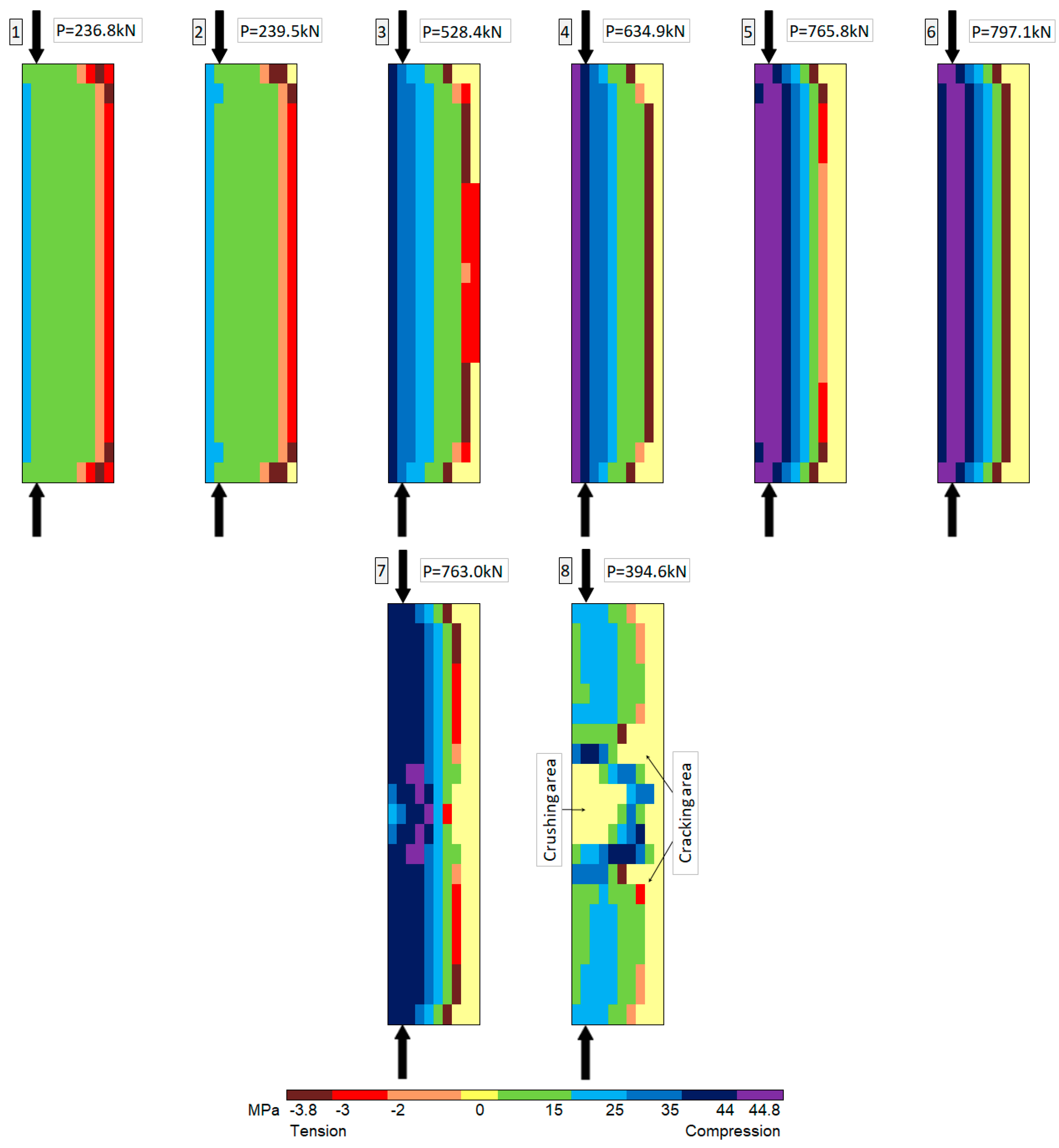
5.2.2. Analysis of the Load-Carrying Capacity and Displacement
6. Conclusions
- Comparative analysis of the results obtained for the bent and eccentrically compressed reinforced concrete elements indicate that the proposed method accurately estimated the load-carrying capacity.
- The considerations carried out and the obtained results of numerical analysis confirm the high efficiency of the developed computational method.
- The proposed method of dynamic relaxation taking into account the constraints equation for the non-linear equilibrium path enables the simulation of inelastic behavior of reinforced concrete elements in the range of continual formation for the failure mechanism.
- The numerical method is useful for tracking the global softening process of the structural element, in such that the range that cannot always be observed in the experiment because of the measurement limitations.
- A greater stiffness was observed in the computational model when compared with previously published experiments. This effect is a consequence of the concrete modeling method.
- In the inelastic range, there was a reduction in the displacement associated with the critical damping factor, which was determined using the longitudinal and flexural stiffness of the column in the elastic range.
- The computational method could be improved by further modifying the concrete model and by introducing a damping factor dependent on the inelastic state of the element. This would result in more precise estimates of the displacement.
- The proposed computational method is suitable for a post-critical analysis of the bending and eccentric compression of inelastic reinforced concrete elements.
- The proposed method is very useful for predicting the development of structural elements failure and for allowing a better analysis of the construction systems’ safety.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Park, J.; Choi, J.; Jang, Y.; Park, S.-K.; Hong, S. An Experimental and Analytical Study on the Deflection Behavior of Precast Concrete Beams with Joints. Appl. Sci. 2017, 7, 1198. [Google Scholar] [CrossRef]
- Smarzewski, P.; Stolarski, A. Numerical Analysis on the High-Strength Concrete Beams Ultimate Behaviour. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245. [Google Scholar] [CrossRef]
- Hao, T.; Cao, W.; Qiao, Q.; Liu, Y.; Zheng, W. Structural Performance of Composite Shear Walls under Compression. Appl. Sci. 2017, 7, 162. [Google Scholar] [CrossRef]
- Ye, J.; Jiang, L.; Wang, X. Seismic failure mechanism of reinforced cold-formed steel shear wall system based on structural vulnerability analysis. Appl. Sci. 2017, 7, 182. [Google Scholar] [CrossRef]
- Cichocki, K.; Domski, J.; Katzer, J.; Ruchwa, M. Impact resistant concrete elements with nonconventional reinforcement. Annu. Set Environ. Prot. 2014, 16, 1–99. [Google Scholar]
- Derysz, J.; Lewiński, P.M.; Wiȩch, P.P. New Concept of Composite Steel-reinforced Concrete Floor Slab in the Light of Computational Model and Experimental Research. Procedia Eng. 2017, 193, 168–175. [Google Scholar] [CrossRef]
- Szczecina, M.; Winnicki, A. Relaxation Time in CDP Model Used for Analyses of RC Structures. Procedia Eng. 2017, 193, 369–376. [Google Scholar] [CrossRef]
- Cichocki, K.; Ruchwa, M. Integrity analysis for multistorey buildings. Ovidius Univ. Ann. Ser. Civ. Eng. 2013, 15, 45–52. [Google Scholar]
- Siwiński, J.; Stolarski, A. Analysis of the dynamic behavior of a charge-transfer amplifier. In Dynamical Systems: Modeling; Springer Proceedings in Mathematics & Statistics; Springer: Berlin, Germany, 2015; pp. 341–352. [Google Scholar]
- Słowik, M.; Smarzewski, P. Study of the scale effect on diagonal crack propagation in concrete beams. Comput. Mater. Sci. 2012, 64, 216–220. [Google Scholar] [CrossRef]
- SŁowik, M.; Smarzewski, P. Numerical Modeling of Diagonal Cracks in Concrete Beams. Arch. Civ. Eng. 2014, 60, 307–322. [Google Scholar] [CrossRef]
- Tamayo, J.L.P.; Morsch, I.B.; Awruch, A.M. Static and dynamic analysis of reinforced concrete shells. Lat. Am. J. Solids Struct. 2013, 10, 1109–1134. [Google Scholar] [CrossRef]
- Nogueira, C.G.; Venturini, W.S.; Coda, H.B. Material and geometric nonlinear analysis of reinforced concrete frame structures considering the influence of shear strength complementary mechanisms. Lat. Am. J. Solids Struct. 2013, 10, 953–980. [Google Scholar] [CrossRef]
- Rodriguez, J.; Rio, G.; Cadou, J.M.; Troufflard, J. Numerical study of dynamic relaxation with kinetic damping applied to inflatable fabric structures with extensions for 3D solid element and non-linear behavior. Thin Walled Struct. 2011, 49, 1468–1474. [Google Scholar] [CrossRef]
- Hincz, K. Nonlinear Analysis of Cable Net Structures Suspended from Arches with Block and Tackle Suspension System, Taking into Account the Friction of the Pulleys. Int. J. Space Struct. 2009, 24, 143–152. [Google Scholar] [CrossRef]
- Bel Hadj Ali, N.; Sychterz, A.C.; Smith, I.F.C. A dynamic-relaxation formulation for analysis of cable structures with sliding-induced friction. Int. J. Solids Struct. 2017, 126–127, 240–251. [Google Scholar] [CrossRef]
- Rezaiee-Pajand, M.; Alamatian, J. The dynamic relaxation method using new formulation for fictious mass and damping. Struct. Eng. Mech. 2010, 34, 109–133. [Google Scholar] [CrossRef]
- Rezaiee-Pajand, M.; Sarafrazi, S.R. Nonlinear dynamic structural analysis using dynamic relaxation with zero damping. Comput. Struct. 2011, 89, 1274–1285. [Google Scholar] [CrossRef]
- Bel Hadj Ali, N.; Rhode-Barbarigos, L.; Smith, I.F.C. Analysis of clustered tensegrity structures using a modified dynamic relaxation algorithm. Int. J. Solids Struct. 2011, 48, 637–647. [Google Scholar] [CrossRef]
- Barnes, M.R.; Adriaenssens, S.; Krupka, M. A novel torsion/bending element for dynamic relaxation modeling. Comput. Struct. 2013, 119, 60–67. [Google Scholar] [CrossRef] [Green Version]
- De Borst, R.Ã.; Crisfield, M.A.; Remmers, J.J.C.; Verhoosel, C.V. Nonlinear Finite Element Analysis of Solids and Structures; Wiley Series in Computational Mechanics; Wiley: Hoboken, NJ, USA, 2012; ISBN 9781118376010. [Google Scholar]
- Pasqualino, I.P. Arc-length method for explicit dynamic relaxation. In Proceedings of the XXI International Congress of Theoretical and Applied Mechanics, Warsaw, Poland, 15–21 August 2004. SM1S-12607. [Google Scholar]
- Ramesh, G.; Krishnamoorthy, C.S. Post-buckling analysis of structures by dynamic relaxation. Int. J. Numer. Methods Eng. 1993, 36, 1339–1364. [Google Scholar] [CrossRef]
- Pasqualino, I.P.; Estefen, S.F. A nonlinear analysis of the buckle propagation problem in deepwater pipelines. Int. J. Solids Struct. 2001, 38, 8481–8502. [Google Scholar] [CrossRef]
- Wriggers, P. Nonlinear Finite Element Methods; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 9783540710004. [Google Scholar]
- Lee, K.S.; Han, S.E.; Park, T. A simple explicit arc-length method using the dynamic relaxation method with kinetic damping. Comput. Struct. 2011, 89, 216–233. [Google Scholar] [CrossRef]
- Buckhouse, E.R. External Flexural Reinforcement of Existing Reinforced Concrete Beams Using Bolted Steel Channels; Marquette University: Milwaukee, WI, USA, 1997. [Google Scholar]
- Foley, C.M.; Buckhouse, E.R. Strengthening Existing Reinforced Concrete Beams for Flexure Using Bolted External Structural Steel Channels; Structural Engineering Report MUST-98-1; Marquette University: Milwaukee, WI, USA, 1998. [Google Scholar]
- Lloyd, N.A.; Rangan, B.V. Studies on High-Strength Concrete Columns under Eccentric Compression. Struct. J. 1996, 93, 631–638. [Google Scholar] [CrossRef]
- Stolarski, A. Model of dynamic deformation of concrete. Arch. Civ. Eng. 1991, 37, 405–447. [Google Scholar]
- Szcześniak, A.; Stolarski, A. A simplified model of concrete for analysis of reinforced concrete elements. Bull. Mil. Univ. Technol. 2016, 65, 55–68. [Google Scholar] [CrossRef]
- Alfarah, B.; López-Almansa, F.; Oller, S. New methodology for calculating damage variables evolution in Plastic Damage Model for RC structures. Eng. Struct. 2017, 132, 70–86. [Google Scholar] [CrossRef]
- Szcześniak, A.; Stolarski, A. Analysis of critical damping in dynamic relaxation method for reinforced concrete structural elements. In Proceedings of the Mathematical and Numerical Approaches, 13th International Conference Dynamical Systems—Theory and Applications, Lodz, Poland, 7–10 December 2015; Awrejcewicz, J., Kaźmierczak, M., Mrozowski, J., Olejnik, P., Eds.; ARSA Druk i Reklama: Łódź, Poland, 2015. [Google Scholar]
- EN 1992-1-1. Eurocode 2: Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings; Europea Commitiee for Standardization: Brussels, Belgium, 2004. [Google Scholar]
- Smarzewski, P. Numerical solution of reinforced concrete beam using arc-length method. Bull. Mil. Univ. Technol. 2016, 65, 33–46. [Google Scholar] [CrossRef]
- Wolanski, A.J. Flexural Behavior of Reinforced and Prestressed Concrete Beams Using Finite Element Analysis; Marquette University: Milwaukee, WI, USA, 2004. [Google Scholar]
- Szcześniak, A.; Stolarski, A. Numerical analysis of failure mechanism of eccentrically compressed reinforced concrete columns. In Insights and Innovations in Structural Engineering, Mechanics and Computation; Zingon, A., Ed.; Taylor & Francis Group: Cape Town, South Africa, 2016; pp. 1325–1330. [Google Scholar]
- Collins, M.P.; Macgregor, J.G.; Mitchell, D. Structural Design Considerations for High-Strength Concrete. Concr. Int. 1993, 15, 27–34. [Google Scholar]
- Godycki-Ćwirko, T.; Korzeniowski, P. Load-bearing capacity of HSC columns, estimated with use of simplified methods in the light of experimental results. Arch. Civ. Eng. 2000, 46, 39–49. [Google Scholar]













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szcześniak, A.; Stolarski, A. Dynamic Relaxation Method for Load Capacity Analysis of Reinforced Concrete Elements. Appl. Sci. 2018, 8, 396. https://doi.org/10.3390/app8030396
Szcześniak A, Stolarski A. Dynamic Relaxation Method for Load Capacity Analysis of Reinforced Concrete Elements. Applied Sciences. 2018; 8(3):396. https://doi.org/10.3390/app8030396
Chicago/Turabian StyleSzcześniak, Anna, and Adam Stolarski. 2018. "Dynamic Relaxation Method for Load Capacity Analysis of Reinforced Concrete Elements" Applied Sciences 8, no. 3: 396. https://doi.org/10.3390/app8030396
APA StyleSzcześniak, A., & Stolarski, A. (2018). Dynamic Relaxation Method for Load Capacity Analysis of Reinforced Concrete Elements. Applied Sciences, 8(3), 396. https://doi.org/10.3390/app8030396