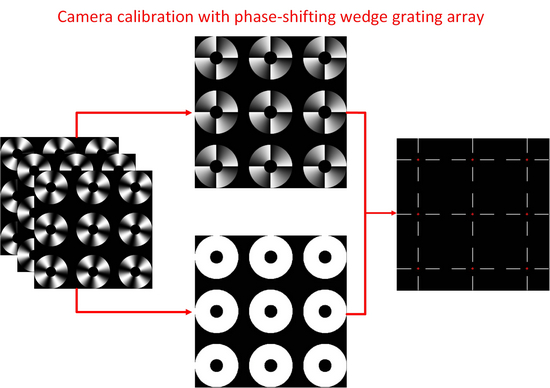
Camera Calibration with Phase-Shifting Wedge Grating Array



Abstract
:
1. Introduction
2. Principle
2.1. Camera Model
2.2. Calibration Pattern
2.3. Feature Detection
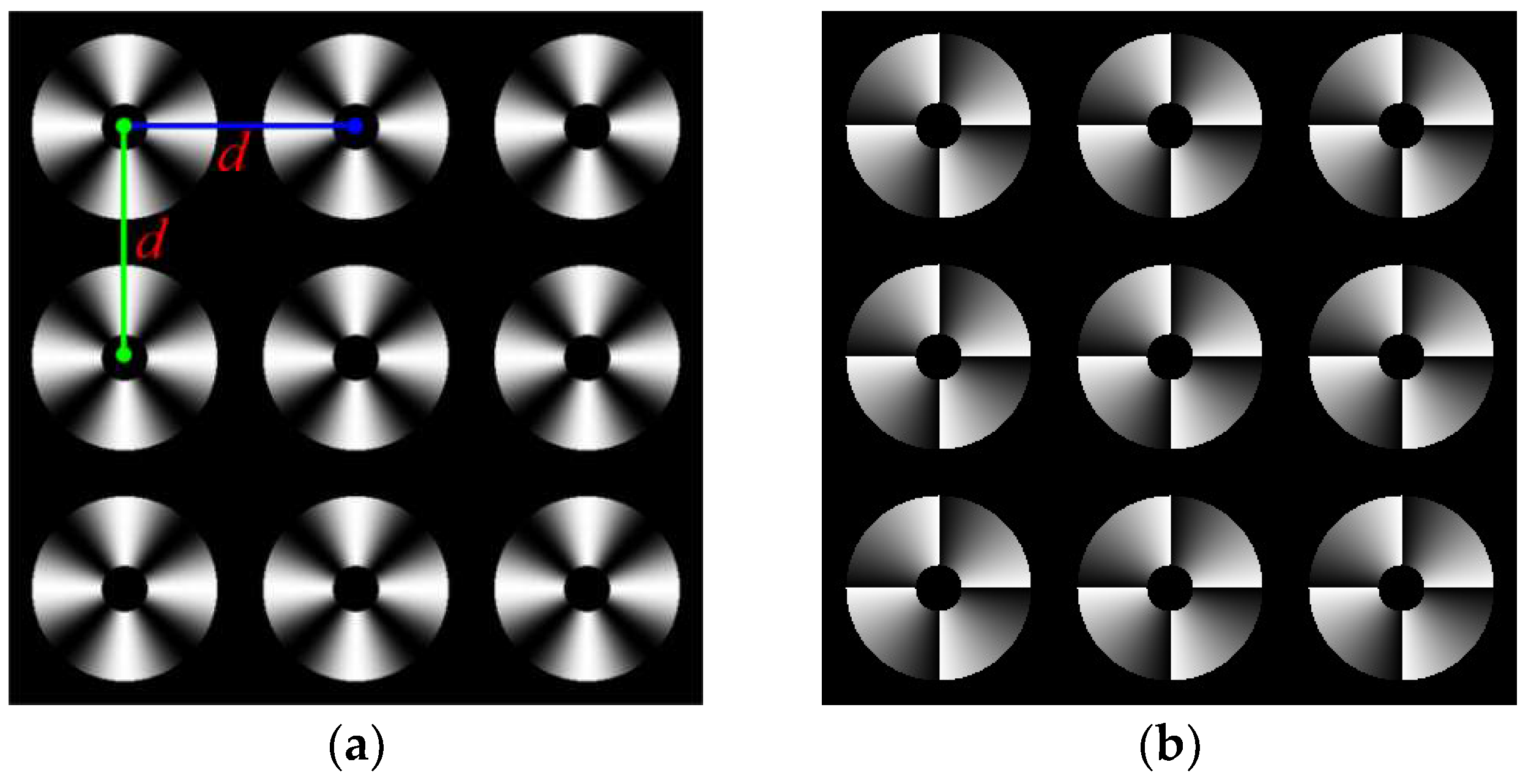
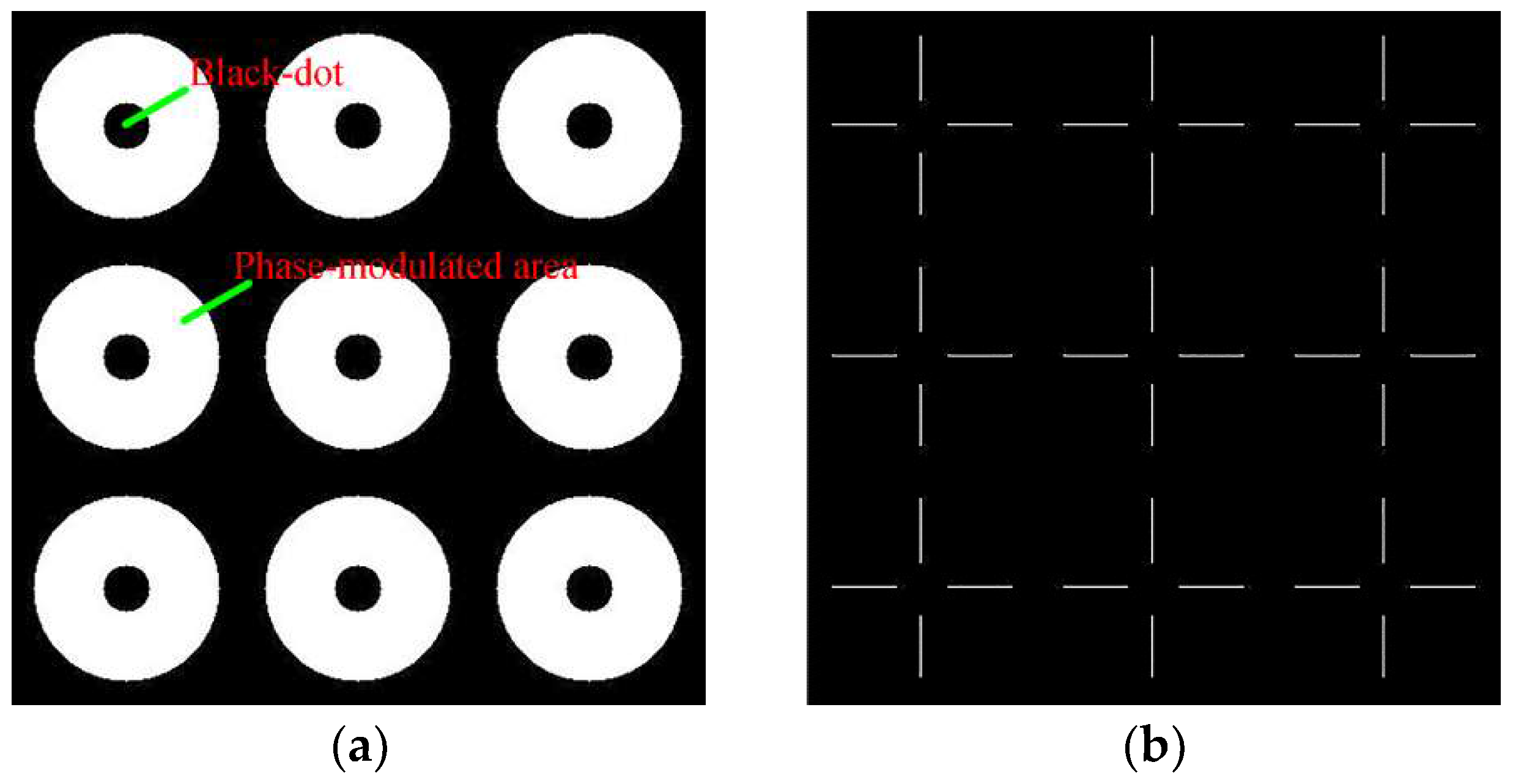
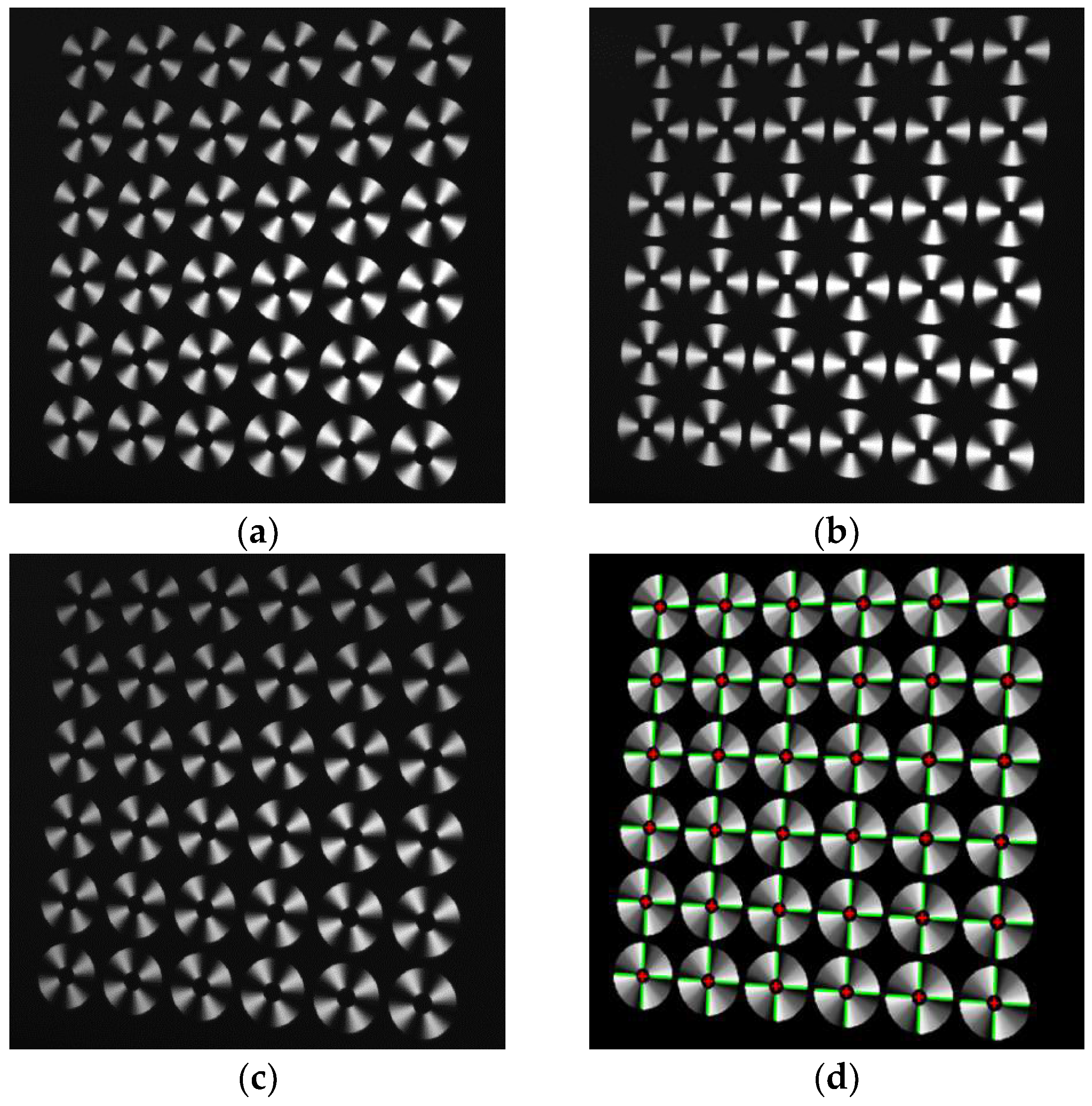
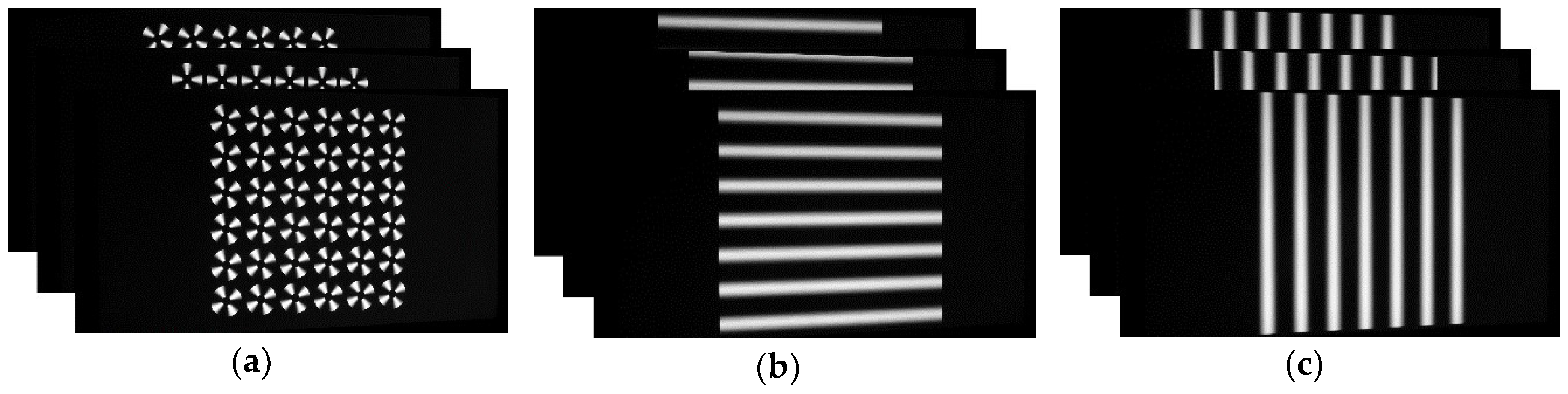
- Let , , and respectively represent the three PWG array images that are captured at the same viewpoint. Adding up the three images, the phase-modulated area (Figure 3a) for PWG arrays can be obtained with a suitable gray threshold :Label the connected components in the phase-modulated area , the sub-masks for each PWG can be achieved. Calculate the centroid of each , which can be regarded as the rough location of the PWG center.
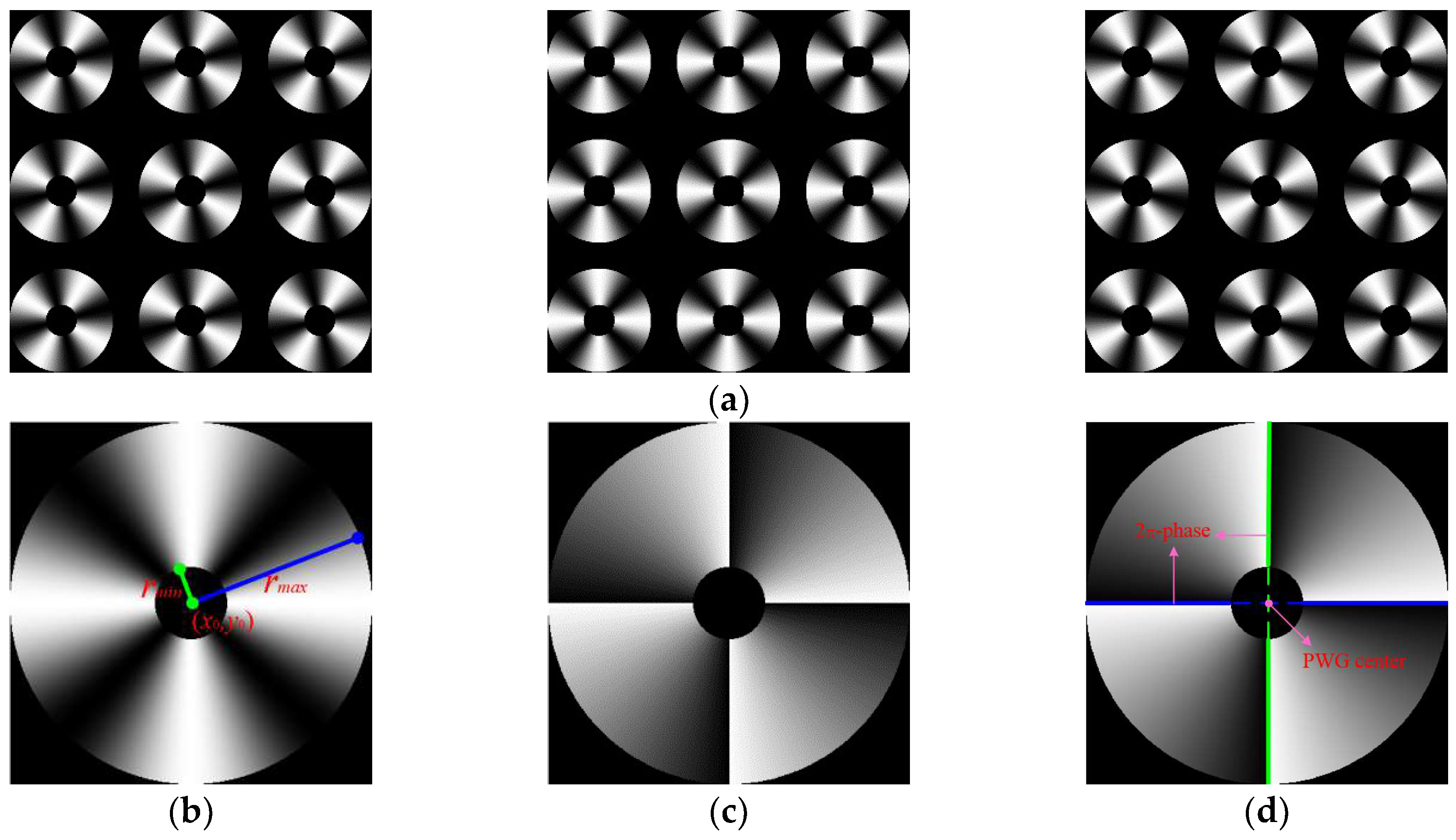
- Based on the three-step phase-shifting algorithm, the wrapped phase ranging from [0, 2π] can be calculated as:Clearly, abruptly changes at the 2π-phase jump areas. Thus, through edge detection (e.g., Sobel, Canny), we can easily extract the 2π-phase points with pixel-level accuracy. These edge points are distributed on several lines, as shown in Figure 3b.
- For each , we select its neighborhood points with wrapped phase . The with 2π-phase jumps can be unwrapped as:Let be the Euclidean distance between and its corresponding center . Then, we can establish the function relations and by the windowed bicubic fitting algorithm. The optimized 2π-phase points can be obtained through substituting and . Those 2π-phase points with sub-pixel accuracy are utilized to locate the real center .
- When all of the 2π-phase points are optimized, two 2π-phase straight lines for each PWG can be obtained with linear fitting algorithm. The intersection point of the two straight lines can be treated as the PWG center, as well as the feature point. Using the one-to-one correspondences between the world and image coordinates of the PWG centers, the camera parameters can be estimated.
3. Experiments
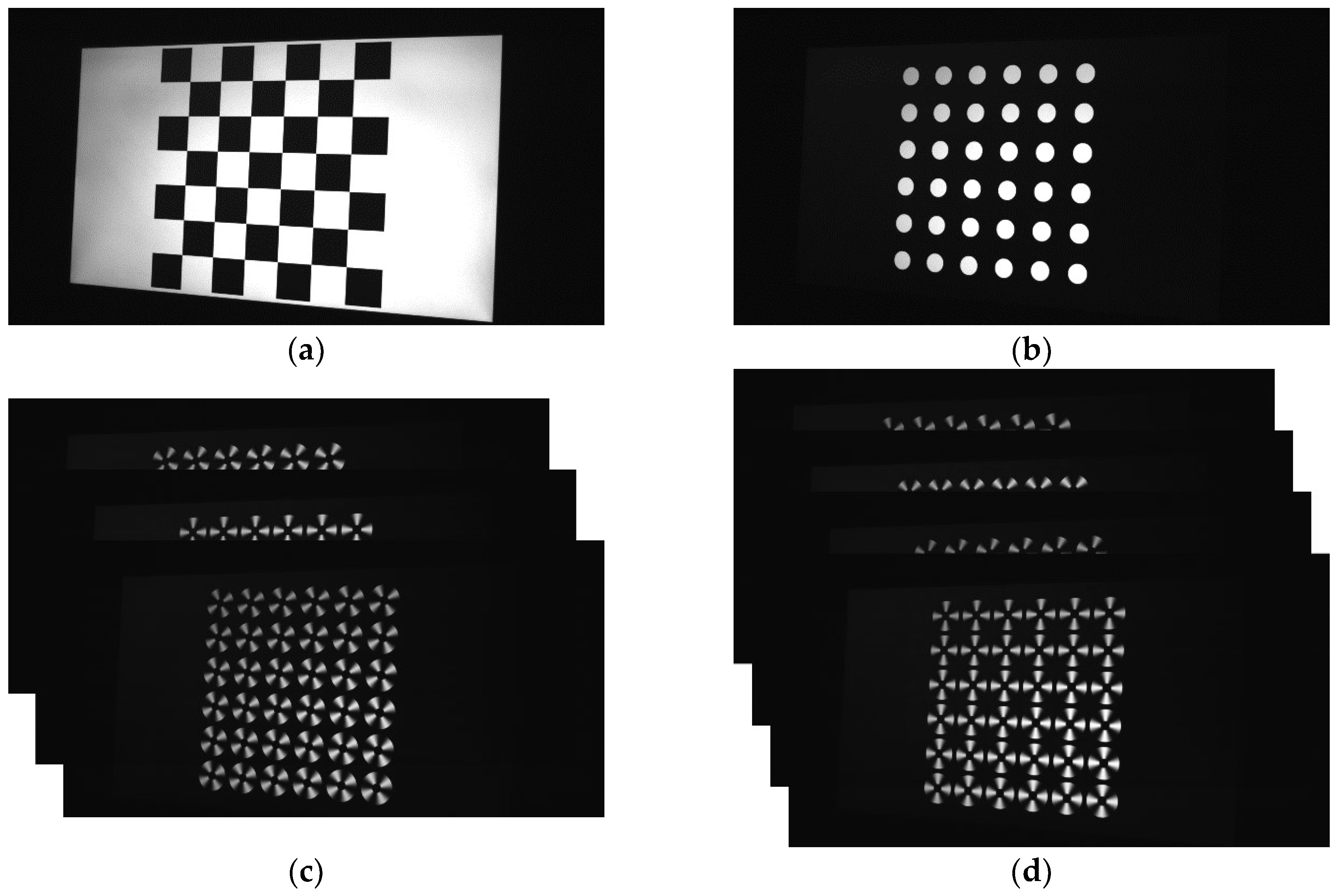
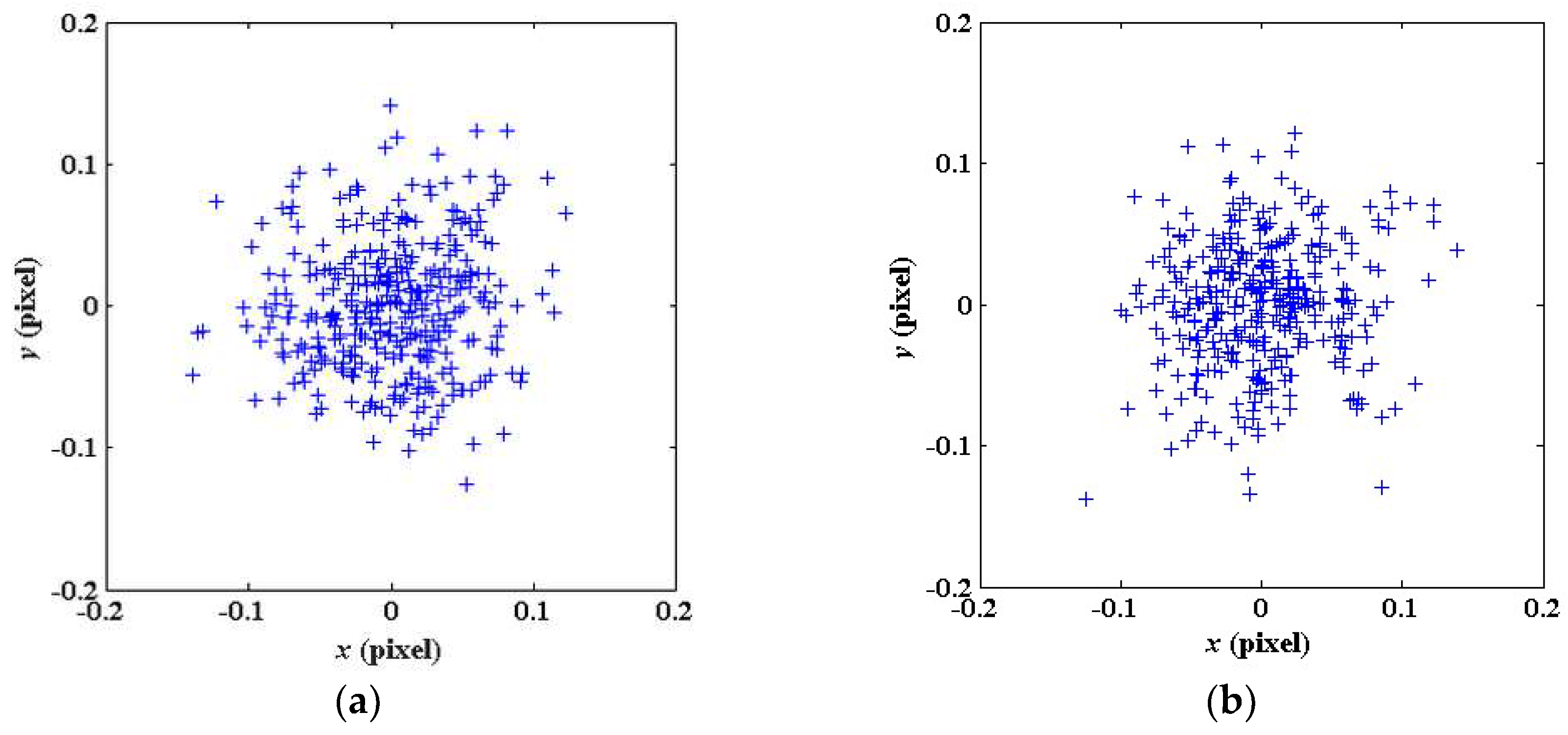
3.1. PWG Arrays VS Checkerboard and Circle Patterns
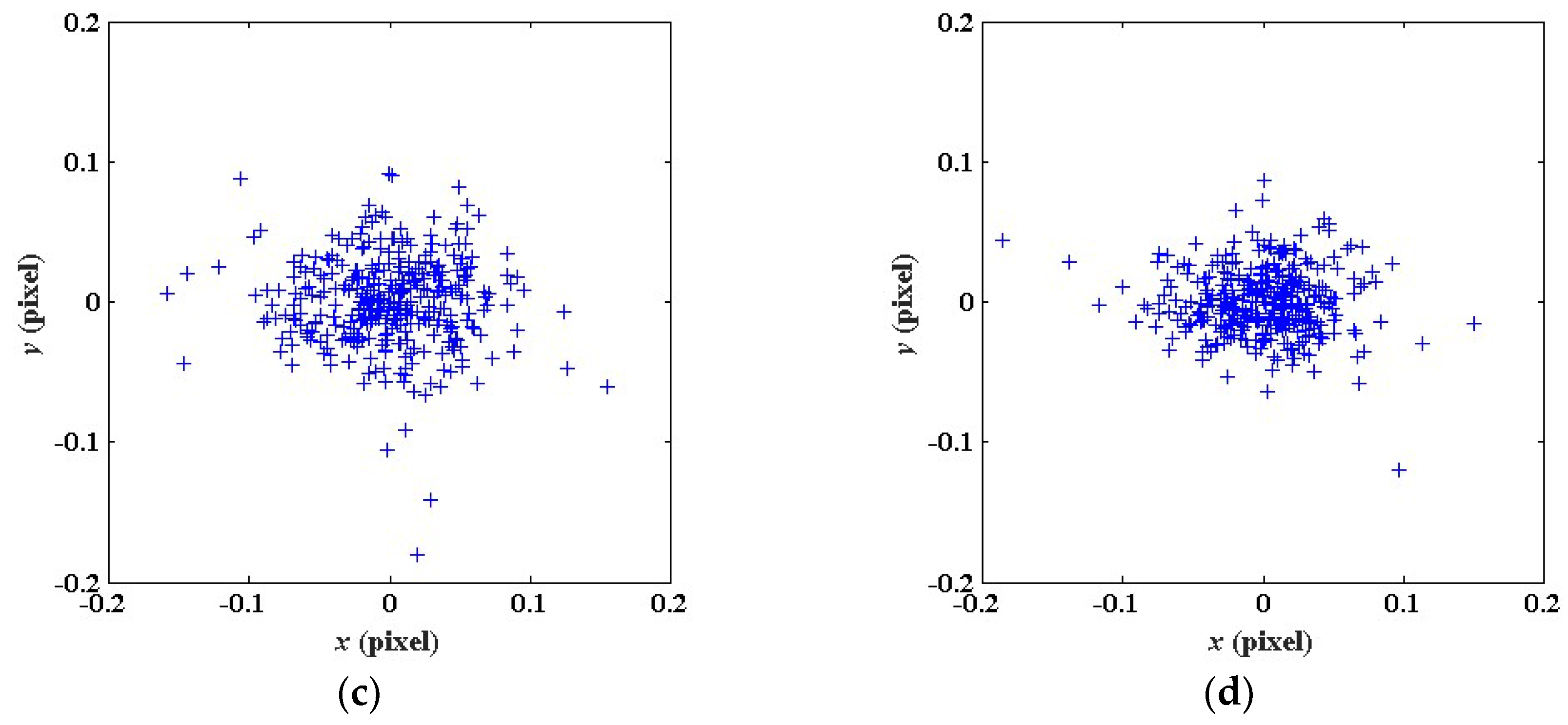
3.2. PWG Arrays VS Horizontal/Vertical Phase-Shifting Fringe Patterns
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Funding
References
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Salvi, J.; Armangué, X.; Batlle, J. A comparative review of camera calibrating methods with accuracy evaluation. Pattern Recognit. 2002, 35, 1617–1635. [Google Scholar] [CrossRef]
- Heikkila, J. Geometric camera calibration using circular control points. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1066–1077. [Google Scholar] [CrossRef]
- Li, L.; Zhao, W.; Wu, F.; Liu, Y.; Gu, W. Experimental analysis and improvement on camera calibration pattern. Opt. Eng. 2014, 53, 013104. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Chen, X.; Yin, Y. High-accuracy calibration of low-cost camera using image disturbance factor. Opt. Express 2016, 24, 24321–24336. [Google Scholar] [CrossRef] [PubMed]
- Vidas, S.; Lakemond, R.; Denman, S.; Fookes, C.; Sridharan, S.; Wark, T. A mask-based approach for the geometric calibration of thermal-infrared cameras. IEEE Trans. Instrum. Meas. 2012, 61, 1625–1635. [Google Scholar] [CrossRef] [Green Version]
- Ricolfe-Viala, C.; Sánchez-Salmerón, A.-J. Robust metric calibration of non-linear camera lens distortion. Pattern Recognit. 2010, 43, 1688–1699. [Google Scholar] [CrossRef]
- Mallon, J.; Whelan, P.F. Calibration and removal of lateral chromatic aberration in images. Pattern Recognit. Lett. 2007, 28, 125–135. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Tian, J. An accurate calibration method for a camera with telecentric lenses. Opt. Lasers Eng. 2013, 51, 538–541. [Google Scholar] [CrossRef]
- Li, B.; Zhang, S. Structured light system calibration method with optimal fringe angle. Appl. Opt. 2014, 53, 7942–7950. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Shi, Y.; Wang, C.; Wang, Y. Accurate calibration method for a structured light system. Opt. Eng. 2008, 47, 053604. [Google Scholar] [CrossRef]
- Cui, J.S.; Huo, J.; Yang, M. The circular mark projection error compensation in camera calibration. Opt.-Int. J. Light Electron Opt. 2015, 126, 2458–2463. [Google Scholar] [CrossRef]
- Liu, Y.; Su, X. Camera calibration with planar crossed fringe patterns. Opt.-Int. J. Light Electron Opt. 2012, 123, 171–175. [Google Scholar] [CrossRef]
- Schmalz, C.; Forster, F.; Angelopoulou, E. Camera calibration: Active versus passive targets. Opt. Eng. 2011, 50, 113601. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, Q.; Asundi, A. Camera calibration with active phase target: Improvement on feature detection and optimization. Opt. Lett. 2013, 38, 1446–1448. [Google Scholar] [CrossRef] [PubMed]
- Ma, M.; Chen, X.; Wang, K. Camera calibration by using fringe patterns and 2D phase-difference pulse detection. Opt.-Int. J. Light Electron Opt. 2014, 125, 671–674. [Google Scholar] [CrossRef]
- Xue, J.; Su, X.; Xiang, L.; Chen, W. Using concentric circles and wedge grating for camera calibration. Appl. Opt. 2012, 51, 3811–3816. [Google Scholar] [CrossRef] [PubMed]
- Ha, H.; Bok, Y.; Joo, K.; Jung, J.; So Kweon, I. Accurate camera calibration robust to defocus using a smartphone. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–16 December 2015; pp. 828–836. [Google Scholar]
- Bell, T.; Xu, J.; Zhang, S. Method for out-of-focus camera calibration. Appl. Opt. 2016, 55, 2346. [Google Scholar] [CrossRef] [PubMed]
- Je, C.; Lee, S.W.; Park, R.-H. Color-phase analysis for sinusoidal structured light in rapid range imaging. In Proceedings of the 6th Asian Conference on Computer Vision, Jeju, Korea, 27–30 January 2004; pp. 270–275. [Google Scholar]
- Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/index.html (accessed on 8 April 2018).
- Image Processing Toolbox Documentation. Available online: http://www.mathworks.com/help/images/index.html (accessed on 8 April 2018).
- Open Computer Vision Library. Available online: http://opencv.org (accessed on 8 April 2018).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | (Pixel) | (Pixel) | (Pixel) | (Pixel) | RMSE (Pixel) | |||
|---|---|---|---|---|---|---|---|---|
| Pattern | ||||||||
| Checkerboard | 2964.7 | 2964.3 | 1011.3 | 545.5 | −0.145 | 0.755 | 0.066 | |
| Circles | 2963.5 | 2962.8 | 1012.8 | 544.8 | −0.146 | 0.754 | 0.063 | |
| Three-step PWG arrays | 2968.2 | 2968.0 | 1010.3 | 546.5 | −0.155 | 0.827 | 0.054 | |
| Four-step PWG arrays | 2965.1 | 2964.8 | 1012.1 | 546.3 | −0.156 | 0.832 | 0.045 | |
| Parameter | (Pixel) | (Pixel) | (Pixel) | (Pixel) | RMSE (Pixel) | |||
|---|---|---|---|---|---|---|---|---|
| Pattern | ||||||||
| Three-step phase-shifting fringe patterns | 2588.2 | 2588.4 | 1008.7 | 544.4 | −0.015 | 0.081 | 0.085 | |
| Three-step PWG arrays | 2561.6 | 2561.5 | 1010.3 | 546.8 | −0.005 | 0.077 | 0.046 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, J.; Wang, Y.; Cai, B.; Wang, K. Camera Calibration with Phase-Shifting Wedge Grating Array. Appl. Sci. 2018, 8, 644. https://doi.org/10.3390/app8040644
Tao J, Wang Y, Cai B, Wang K. Camera Calibration with Phase-Shifting Wedge Grating Array. Applied Sciences. 2018; 8(4):644. https://doi.org/10.3390/app8040644
Chicago/Turabian StyleTao, Jiayuan, Yuwei Wang, Bolin Cai, and Keyi Wang. 2018. "Camera Calibration with Phase-Shifting Wedge Grating Array" Applied Sciences 8, no. 4: 644. https://doi.org/10.3390/app8040644
APA StyleTao, J., Wang, Y., Cai, B., & Wang, K. (2018). Camera Calibration with Phase-Shifting Wedge Grating Array. Applied Sciences, 8(4), 644. https://doi.org/10.3390/app8040644