Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment


Abstract
:
1. Introduction
2. Related Work
3. Dynamic Multiple Junction Based Source Routing Protocol
3.1. Limitatiotions of Existing Protocols
3.2. DMJSR Protocol Overview
3.2.1. Protocol Assumptions
3.2.2. Dynamic Multiple Junction Selection
| Algorithm 1. The Dynamic Multiple Junction Selection Mechanism |
| Input: Area, α, H2 |
| Output: The next destination junction NDj |
| 1. begin |
| 2. set score ← 0 |
| 3. set β ← 1 − α |
| 4. set H1 ← 1 − H2 |
| 5. for each candidate junction j do |
| 6. set Dn ← the curve metric distance between NCj and destination /* NCj is the next candidate junction (one-hop) */ |
| 7. set Dc ← the curve metric distance between Cj and destination /* Cj is the current junction */ |
| 8. set Dp1 ← Dn/Dc/* Closeness of candidate junction to destination */ |
| 9. set TD1 ← no. of vehicles between NCj and Cj in both directions |
| 10. if score < (α × (1 − Dp1) + β × TD1) |
| 11. if NCj contains next candidate neighbour junction NCk //two-hop |
| 12. invoke Algorithm 2 //GetnextneighbourjuctionKofJ (NDk, Score) |
| 13. set ScoreK = Score |
| 14. set NCj ← NDk |
| 15. set NDj ← NCj |
| 16. set score ← H1.(α × (1 − Dp1 ) + β × TD1 ) + H2. (ScoreK) |
| 17. else |
| 18. set NDj ← NCj |
| 19. set score ← α × (1 − Dp1 ) + β × TD1 |
| 20. end |
| 21. end |
| 22. end |
| 23. return NDj |
| 24. end |
| Algorithm 2. Second-Hop Neighbor Junction Score Computation |
| Input: Area, α |
| Output: The next destination junction NDk with Score |
| GetnextneighbourjuctionKofJ (NCk, Score) |
| 1. begin |
| 2. for each candidate junction K of J do |
| 3. set Dnk ← the curve metric distance between NCk and destination /* NCk is the next candidate junction */ |
| 4. set Dck ← the curve metric distance between Ck and destination /* Ck is the current junction */ |
| 5. set Dp2 ← Dnk /Dck//closeness of second hop w.r.t destination |
| 6. set TD2 ← no. of vehicles between NCk and Ck in both directions |
| 7. if score < (α × (1 − Dp2 ) + β × TD2) then |
| 8. set NDk ← NCk |
| 9. set score ← α × (1 − Dp2 ) + β × TD2 |
| 10. end |
| 11. end |
| 12. return (NDk, Scorek) |
| 13. end |
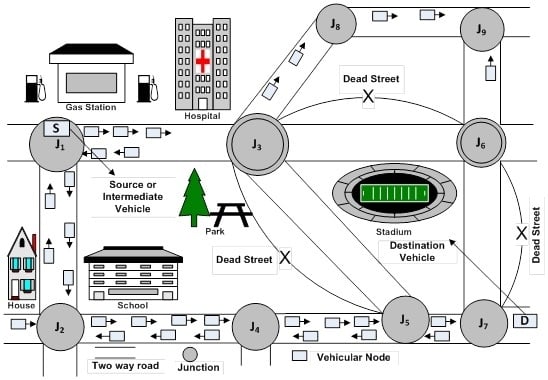
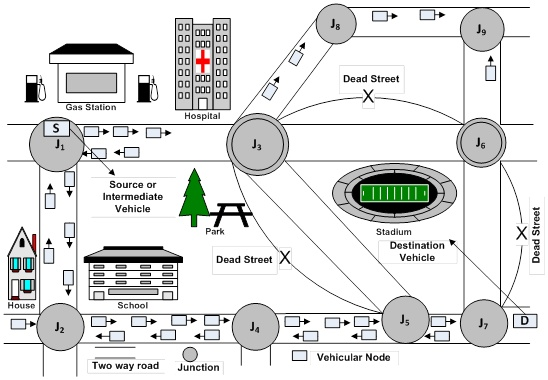
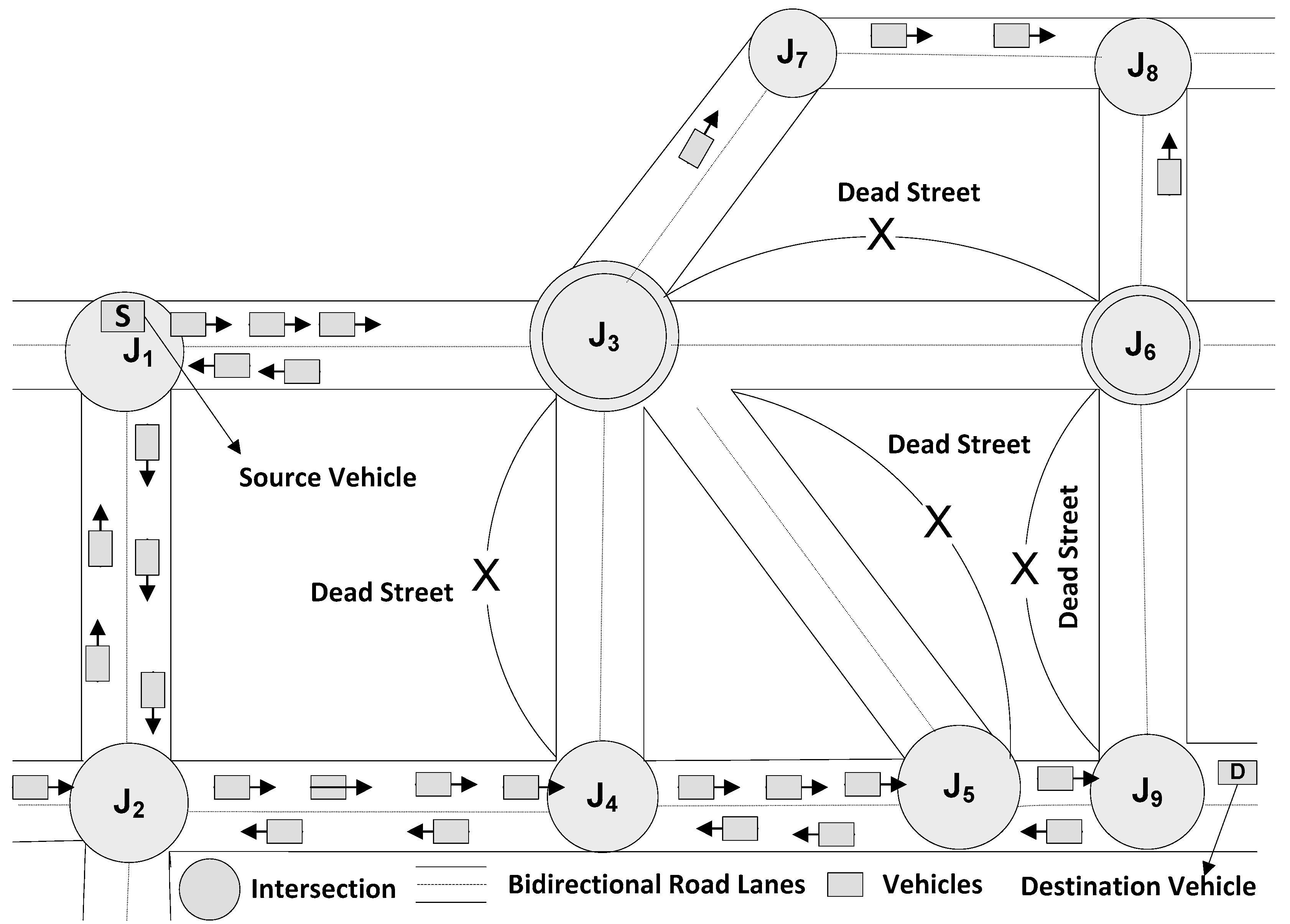
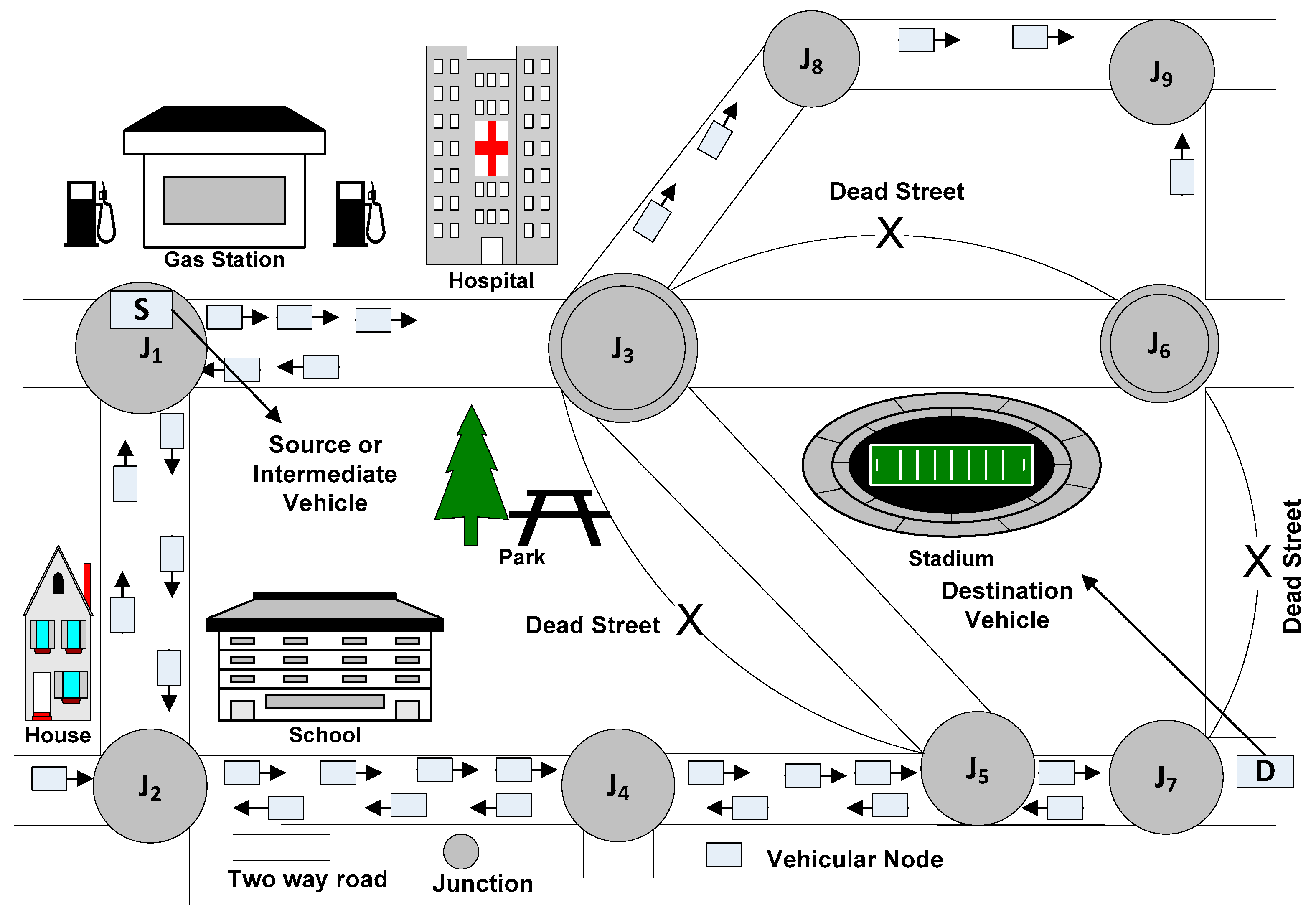
3.2.3. Illustrative Example for DMJSR Working
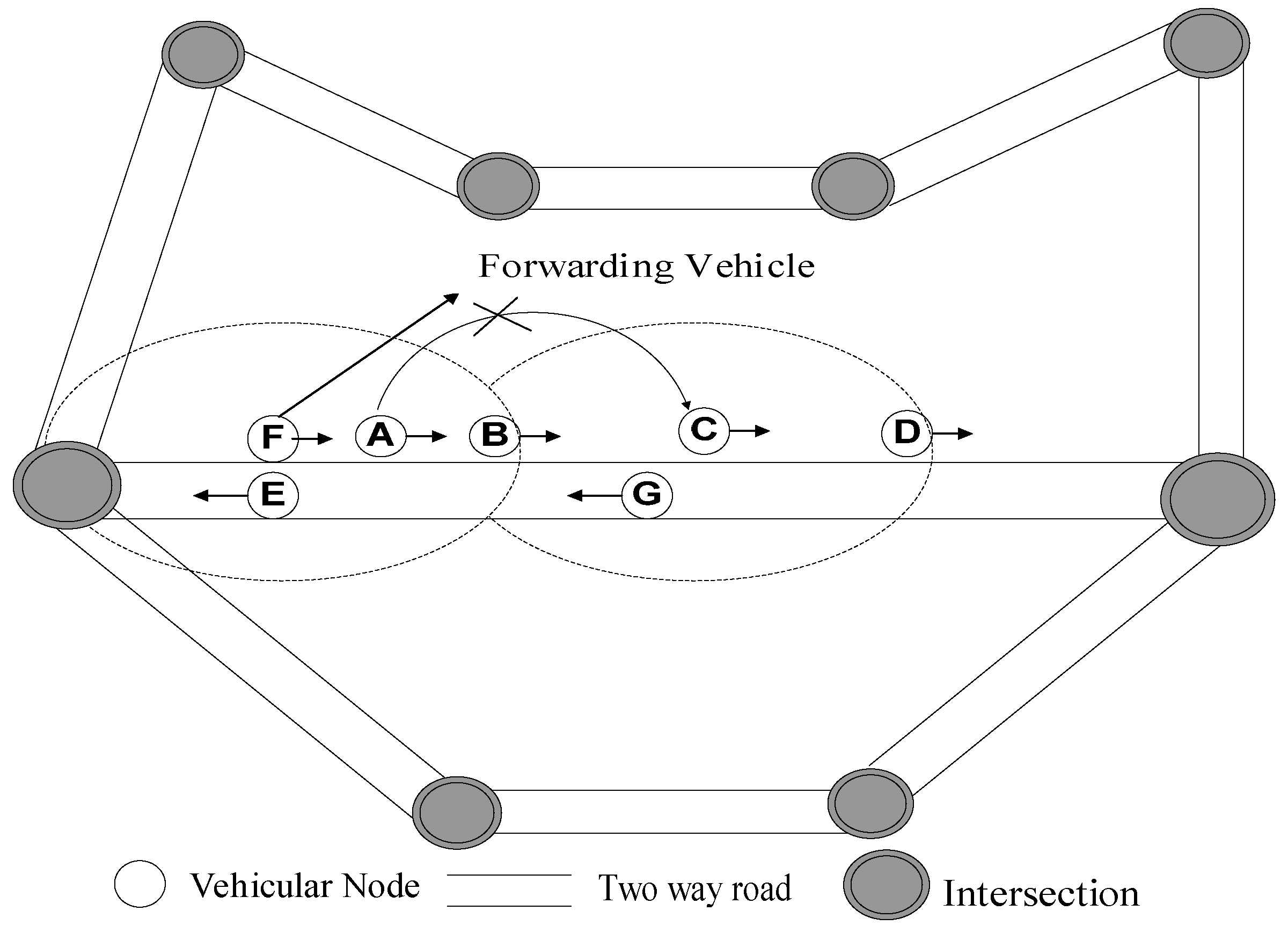
3.2.4. Forwarding between Junctions
4. Simulation Setup and Result Analysis
4.1. Mobility Model
4.2. Simulation Scenario
4.3. Simulation Results and Discussion
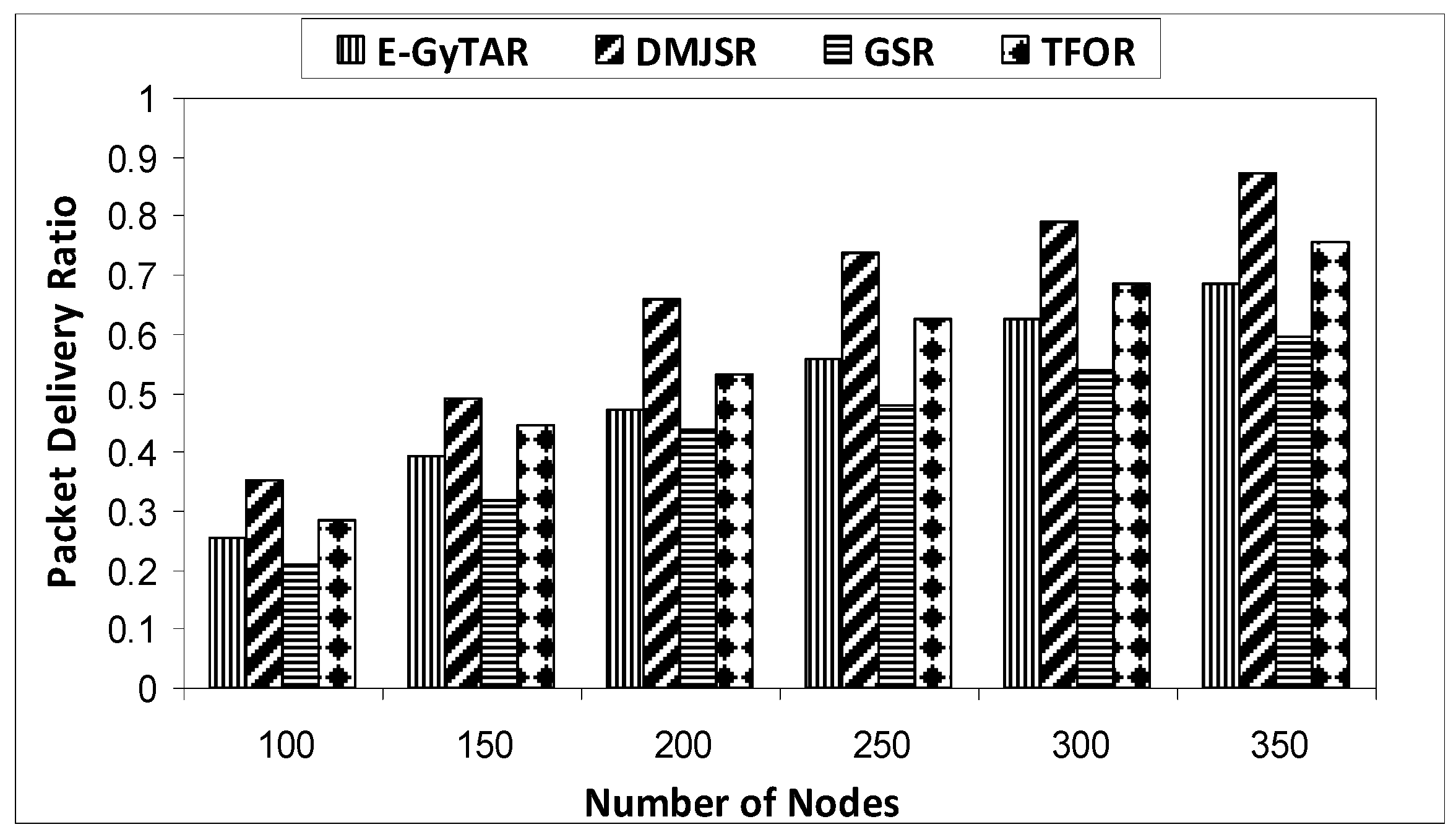
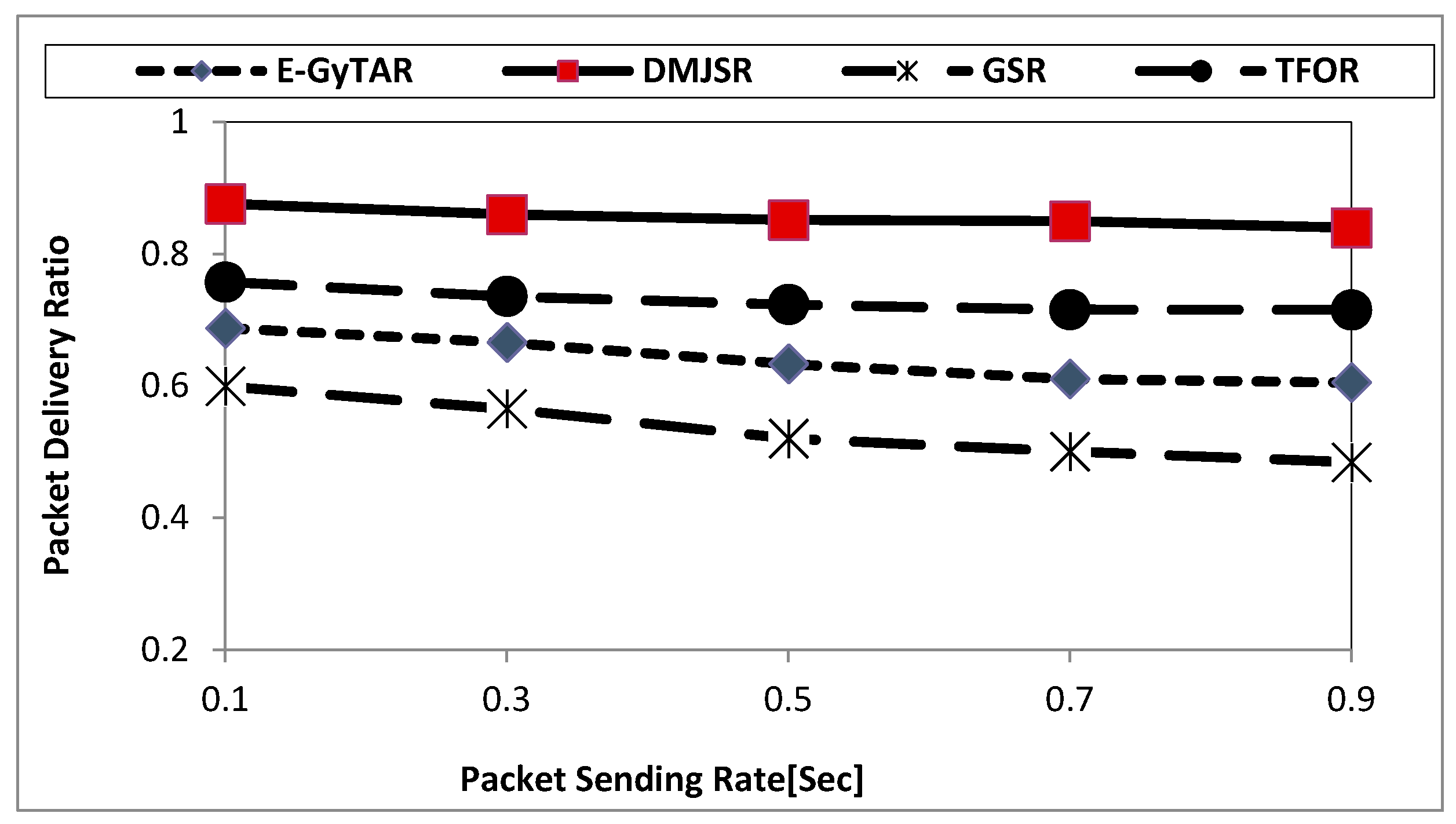
4.3.1. Packet Delivery Ratio
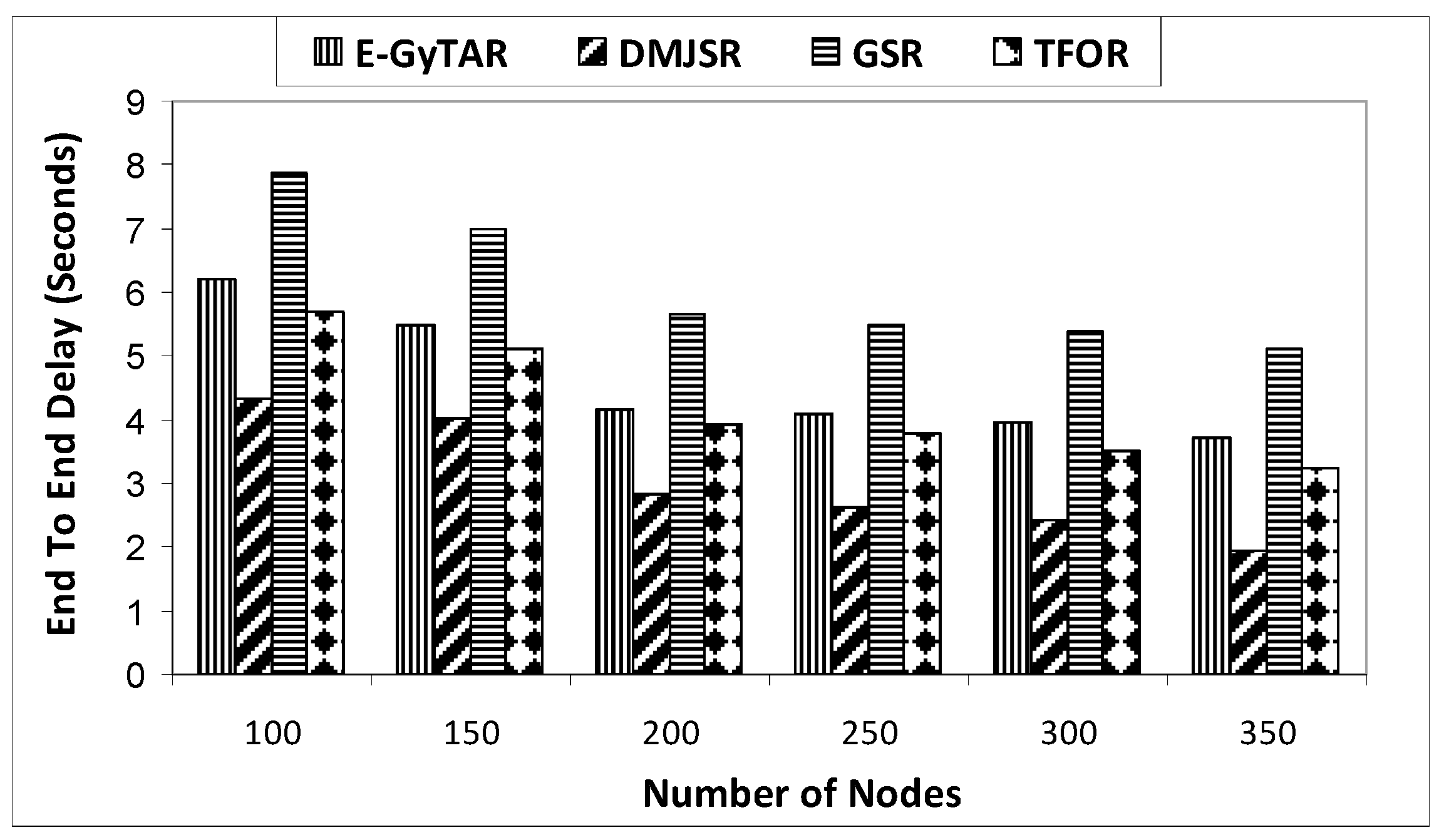
4.3.2. End-To-End Delay
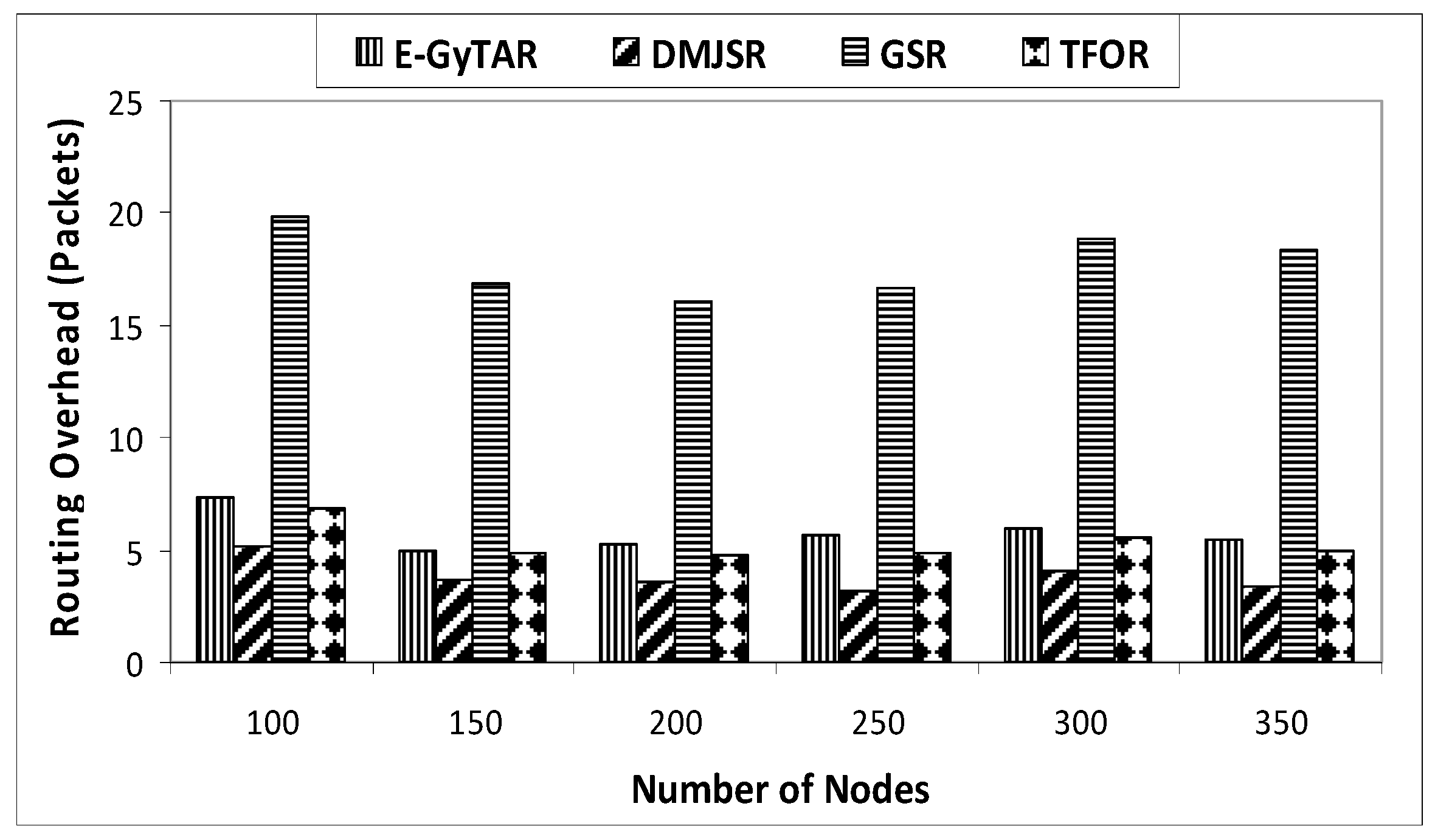
4.3.3. Routing Overhead
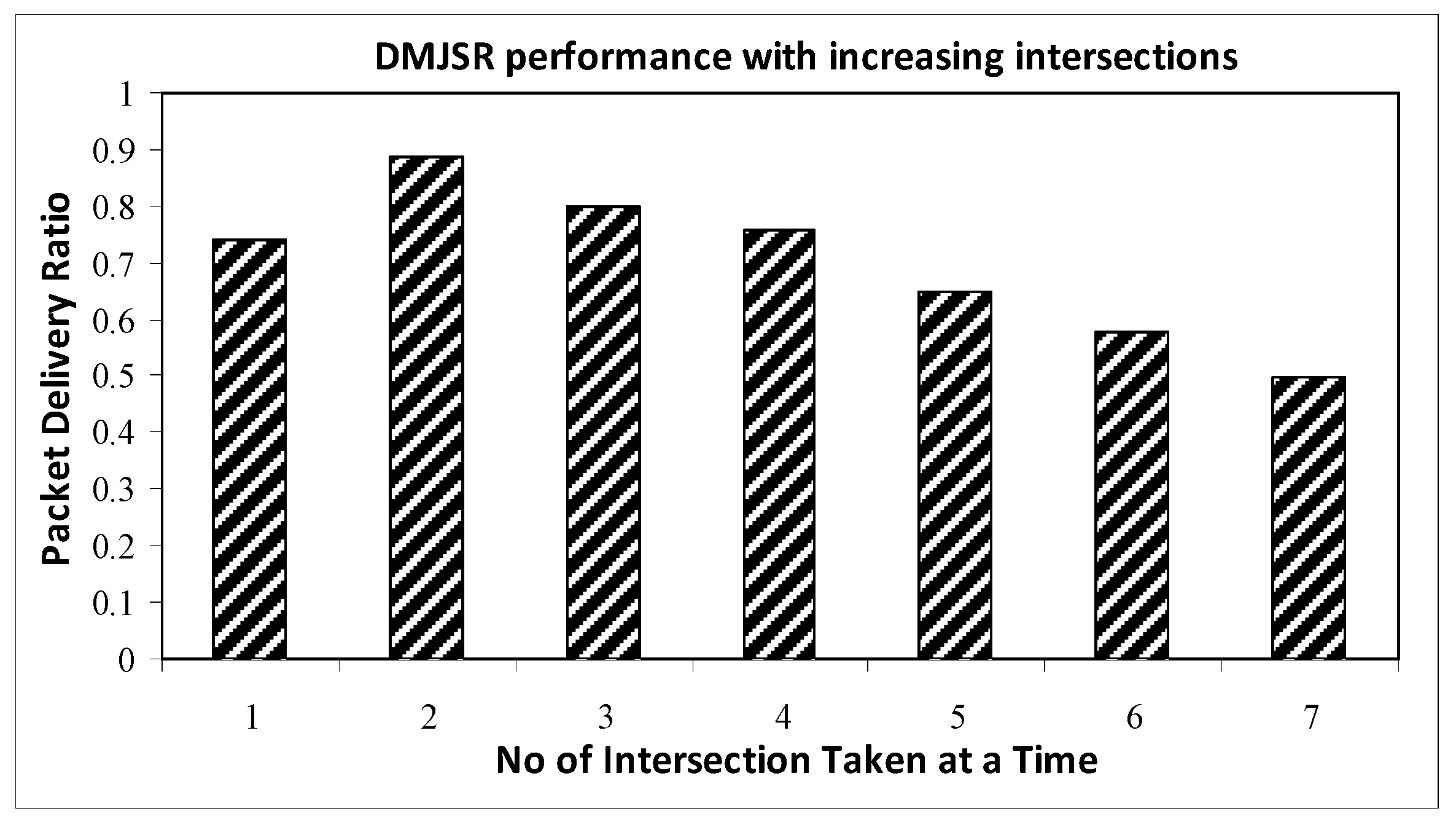
4.3.4. Impact of Increasing Number of Considered Junctions Dynamically
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Abdalla, G.M.T.; Rgheff, M.A.A.; Senouci, S.M. Current trends in vehicular ad hoc networks. Ubiquitous Comput. Commun. J. 2008, 11, 1–9. [Google Scholar]
- Bilal, S.M.; Madani, S.A.; Khan, I.A. Enhanced junction selection mechanism for routing protocol in VANETs. Int. Arab J. Inf. Technol. 2011, 8, 422–429. [Google Scholar]
- Abbasi, I.A.; Nazir, B.; Bilal, S.M.; Madani, S.A. A traffic flow oriented routing protocol for VANET. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 121. [Google Scholar] [CrossRef]
- Sharma, R.; Choudhry, A. An extensive survey on different routing protocols and issue in VANETs. Int. J. Comput. Appl. 2014, 106, 1–18. [Google Scholar]
- Shah, S.A.A.; Shiraz, M.; Nasir, M.K.; Noor, R.B.M. Unicast routing protocols for urban vehicular networks: Review, taxonomy, and research issues. J. Zhejiang Univ. Sci. (Comput. Electron.) 2014, 15, 489–513. [Google Scholar] [CrossRef]
- Silva, A.C. Applicability of position-based routing for VANET in highways and urban Environment. Port. J. Netw. Comput. Appl. 2013, 36, 961–973. [Google Scholar]
- Dhankhar, S.; Agrawal, S. A survey on routing protocols and issues. Int. J. Innov. Res. Sci. Eng. Technol. 2014, 3, 13427–13434. [Google Scholar]
- Husain, A.; Shringar, R.; Kumar, B.; Doegar, A. Performance comparison topology based and position based Routing protocols in vehicular network environments. Int. J. Wirel. Mob. Netw. (IJWMN) 2011, 3, 289–303. [Google Scholar] [CrossRef]
- Jimenez, F.; Clavijo, M.; Jose, E.N.; Gomez, O. Improving the Lane Reference Detection for Autonomous Road Vehicle Control. Sensors 2016, 13, 9497524. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Jimenez, F.; Anaya, J.J.; Talavera, E.; Gomez, O. Application of vehicle to another entity (V2X) communications for motorcycle crash avoidance. J. Intell. Transp. Syst. 2017, 21, 285–295. [Google Scholar] [CrossRef]
- Abbasi, I.A.; Khan, A.S. A Review of Vehicle to Vehicle Communication Protocols for VANETs in the Urban Environment. J. Future Internet 2018, 10, 14. [Google Scholar] [CrossRef]
- Lin, Y.W.; Chen, Y.S.; Lee, S.L. Routing protocols in vehicular ad hoc networks: A survey and future perspectives. J. Inf. Sci. Eng. 2010, 26, 913–932. [Google Scholar]
- Gupta, N.; Prakash, A.; Tripathi, R. Adaptive Beaconing in mobility aware clustering based MAC protocol for safety message dissemination in VANET. Wirel. Commun. Mob. Comput. 2017, 2017, 1246172. [Google Scholar] [CrossRef]
- Bilal, S.M.; Khan, A.R.; Ali, S. Review and performance analysis of position based routing protocols. Wirel. Pers. Area Commun. 2017, 94, 559–578. [Google Scholar] [CrossRef]
- Car-Talk 2000. Available online: http://www.cartalk2000.net/ (accessed on 5 April 2017).
- CAR 2 CAR Communication Consortiums. Available online: http://www.car-to-car.org (accessed on 27 April 2017).
- California Partners for Advanced Transit and Highways. Available online: http://www.path.berkeley.edu (accessed on 3 January 2018).
- FleetNet. Available online: https://fleetnetamerica.com (accessed on 11 June 2017).
- Crash Avoidance Metrics Partnership. Available online: https://www.mentor.com (accessed on 29 August 2017).
- Chauffeur in EU. Available online: http://www.autoeurope.com/go/chauffeur-services (accessed on 3 January 2018).
- Karp, B.; Kung, H.T. Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (ICMCN ’6), Boston, MA, USA, 6–11 August 2000; ACM: New York, NY, USA, 2000; pp. 243–254. [Google Scholar]
- Rahim, A.; Ahmad, I.; Khan, Z.S.; Sher, M.; Javed, A.; Shoaib, M.; Mahmood, R. A Comparative study of mobile and vehicular adhoc networks. Int. J. Recent Trends Eng. 2009, 2, 195–197. [Google Scholar]
- Hartenstein, H.; Laberteaux, K.P. Vehicular Applications and Internetworking Technologies; Wiley Online Library: Hoboken, NJ, USA, 2010; pp. 1–14. [Google Scholar]
- Jaap, S.; Bechler, M. Evaluation of routing protocols for vehicular ad hoc networks in city traffic scenarios. In Proceedings of the 5th International Conference on Intelligent Transportation Systems Telecommunications (ITST ’5), Brest, France, 27–29 June 2005; pp. 1–9. [Google Scholar]
- Cheng, J.; Cheng, J.; Zhou, M.C.; Liu, F.Q.; Gao, S.C.; Liu, C. Routing in Internet of vehicles: A Review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2339–2352. [Google Scholar] [CrossRef]
- Sharef, B.T.; Alsaqour, R.A.; Ismail, M. Review: Vehicular communication ad hoc routing protocols: A survey. J. Netw. Comput. Appl. 2014, 40, 363–396. [Google Scholar] [CrossRef]
- Lee, K.C.; Lee, U.; Gerla, M. Advances in Vehicular Ad-Hoc Networks: Developments and Challenges; Chapter Survey of Routing Protocols in Vehicular Ad Hoc Networks; IGI Global: Harrisburg, PA, USA, 2009. [Google Scholar]
- Li, F.; Wang, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 15, 12–22. [Google Scholar] [CrossRef]
- Johnson, D.B.; Maltz, D.A. Dynamic Source Routing in Ad Hoc Wireless Networks; Kluwer Academic Publishers: Norwell, MA, USA, 1996; pp. 153–181. [Google Scholar]
- Perkins, C.E.; Royer, E.M. Ad hoc on demand distance vector routing. In Proceedings of the Second IEEE Workshop on Wireless Mobile Computing Systems and Applications (WMCSA ’2), New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar]
- Jerbi, M.; Senouci, S.M.; Meraihi, R.; Doudane, Y.G. An improved vehicular ad hoc routing protocol for city Environments. In Proceedings of the IEEE International Conference on Communications (ICC ’07), Glasgow, UK, 24–28 June 2007; pp. 1–8. [Google Scholar]
- Clausen:, T.; Jacquet, P. Optimized Link State Routing Protocol; RFC 3626; Internet Engineering Task Force: Fremont, CA, USA, 2003. [Google Scholar]
- Lochert, C.; Mauve, M.; Fubler, H.; Hartenstein, H. Geographic routing in city scenarios. SIGMOBILE Mob. Comput. Commun. Rev. 2005, 5, 69–72. [Google Scholar] [CrossRef]
- Kieb, W.; Fubler, H.; Widmer, J.; Mauve, M. Hierarchical location service for mobile ad hoc networks. SIGMOBILE Mobile Comput. Commun. Rev. 2004, 8, 47–58. [Google Scholar]
- Politecnico, M.F.; Abruzzi, C.D.D.; Harri, J.; Filali, F. Vehicular Mobility Simulation for VANETs; Christian Bonnet Institute Eurecom, Department of Mobile Communications 06904: Sophia, France, 2011; pp. 1–14. [Google Scholar]
- Li, J.; Jannotti, J.; Decouto, D.S.J.; Karger, D.R.; Morris, R. A scalable location service for geographic ad hoc routing. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (MobiCom ’6), Boston, MA, USA, 6–11 August 2000; ACM: New York, NY, USA, 2000; pp. 120–130. [Google Scholar]
- Kasemann, M.; Fubler, H.; Hartenstein, H.; Mauve, M. A Reactive Location Service for Mobile Ad Hoc Networks; Technical Report TR-02-014; Department of Computer Science, University of Mannheim: Mannheim, Germany, 2002. [Google Scholar]
- Lochert, C.; Hartenstein, H.; Tian, J.; Fubler, H.; Hermann, D.; Mauve, M. A routing strategy for vehicular ad hoc network in city environment. In Proceedings of the IEEE Intelligent Vehicles Symposium (IVS), Columbus, OH, USA, 9–11 June 2003; pp. 156–161. [Google Scholar]
- Lee, K.C.; Haerri, J.; Lee, U. Enhanced perimeter routing for geographic forwarding protocols in urban vehicular scenarios. In Proceedings of the IEEE Globecom Workshops, Washington, DC, USA, 26–30 November 2007; pp. 1–9. [Google Scholar]
- Seet, B.C.; Liu, G.; Lee, B.S.; Foh, C.H.; Wong, K.J.; Lee, K.K. A-STAR: A mobile ad hoc routing strategy for metropolitan area in vehicular communications. In NETWORKIN2004, Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks, Mobile and Wireless Communications; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2004; pp. 989–999. [Google Scholar]
- Jerbi, M.; Senouci, S.M.; Rasheed, T.; Ghamri, Y. An infrastructure free intervehicular communication based traffic information. In Proceedings of the First IEEE International Symposium on Wireless Vehicular Communication (WiVec ’07), Baltimore, MD, USA, 30 September–1 October 2007. [Google Scholar]
- GLOMOSIM Simulator. Available online: https://networksimulationtools.com/glomosim-simulator-projects (accessed on 15 March 2017).
- Harri, J.; Filali, F.; Bonnet, C.; Fiore, M. VanetMobiSim: Generating realistic mobility patterns for VANETs. In Proceedings of the 3rd ACM International Workshop on Vehicular Ad Hoc Networks (ACM Wkshps ’06), Los Angeles, CA, USA, 24–29 September 2006; pp. 86–97. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charateristics | Location Based Routing Protocols for VANETs | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| GSR [34] | GPCR [33] | GPSRJ+ [39] | A-STAR [40] | GyTAR [31] | E-GyTAR [2] | TFOR [3] | DGSR [14] | E-GyTARD [14] | |
| Dynamic Junction Selection | No | No | No | No | Yes | Yes | Yes | Yes | Yes |
| Static Junction Selection | Yes | - | No | Yes | No | No | No | No | No |
| Scenario | City | City | City | City | City | City | City | City | City |
| Hop Count | Single hop | Single hop | Two hops | Single hop | Single hop | Single hop | Two hops | Single hop | Single hop |
| Realistic Mobility Flows | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Local Optimum Handling Strategy | Fall back on greedy mode | Right hand rule | Perimeter mode | Reconstruct anchor path | Carry and forward | Carry and forward | Carry and forward | Carry and forward | Carry and forward |
| Map Required | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| GPS Required | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Prediction Based | No | No | Yes | No | Yes | Yes | Yes | No | Yes |
| Location Service Required | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Traffic Aware | No | No | No | No | Yes | Yes | Yes | No | Yes |
| Simulation/Scenario | MAC/Routing | ||
|---|---|---|---|
| Simulation time | 250 min | MAC (Medium Access Control) protocol | 802.11 DCF (Distributed Coordination Function) |
| Map size | 3000 × 2700 m2 | Channel capacity | 54 Mbps |
| Mobility model | VanetMobiSim | Transmission range | 266 m |
| Number of intersections | 23 | Traffic model | 15 CBR connections |
| Number of double lane roads | 36 | Packet sending rate | (1–10 packet(s)/second) |
| Number of vehicles | 100–350 | Vehicle Speed | 35–60 Km/h |
| Number of simulation runs | 10 | Packet size | 128 bytes |
| Weighting factors | α = 0.5, β = 0.5, H1 = 0.5, H2 = 0.5 | Beacon Interval | 1 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbasi, I.A.; Khan, A.S.; Ali, S. Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment. Appl. Sci. 2018, 8, 687. https://doi.org/10.3390/app8050687
Abbasi IA, Khan AS, Ali S. Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment. Applied Sciences. 2018; 8(5):687. https://doi.org/10.3390/app8050687
Chicago/Turabian StyleAbbasi, Irshad Ahmed, Adnan Shahid Khan, and Shahzad Ali. 2018. "Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment" Applied Sciences 8, no. 5: 687. https://doi.org/10.3390/app8050687
APA StyleAbbasi, I. A., Khan, A. S., & Ali, S. (2018). Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment. Applied Sciences, 8(5), 687. https://doi.org/10.3390/app8050687