Figure 1.
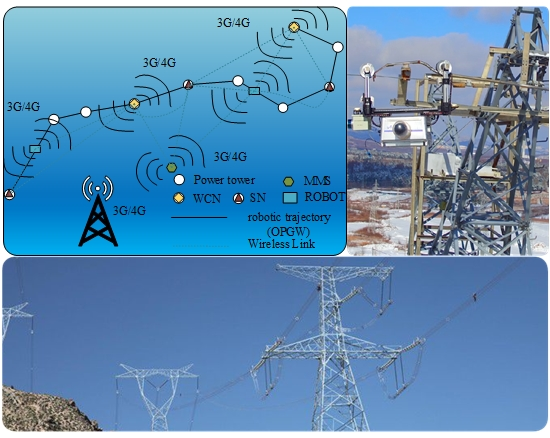
Inspection robot project running in Jilin, 2016–2017. (a) Power tower and additional device; (b) Inspection robot; (c) Mobile Monitoring Station (MMS).
Figure 1.
Inspection robot project running in Jilin, 2016–2017. (a) Power tower and additional device; (b) Inspection robot; (c) Mobile Monitoring Station (MMS).
Figure 2.
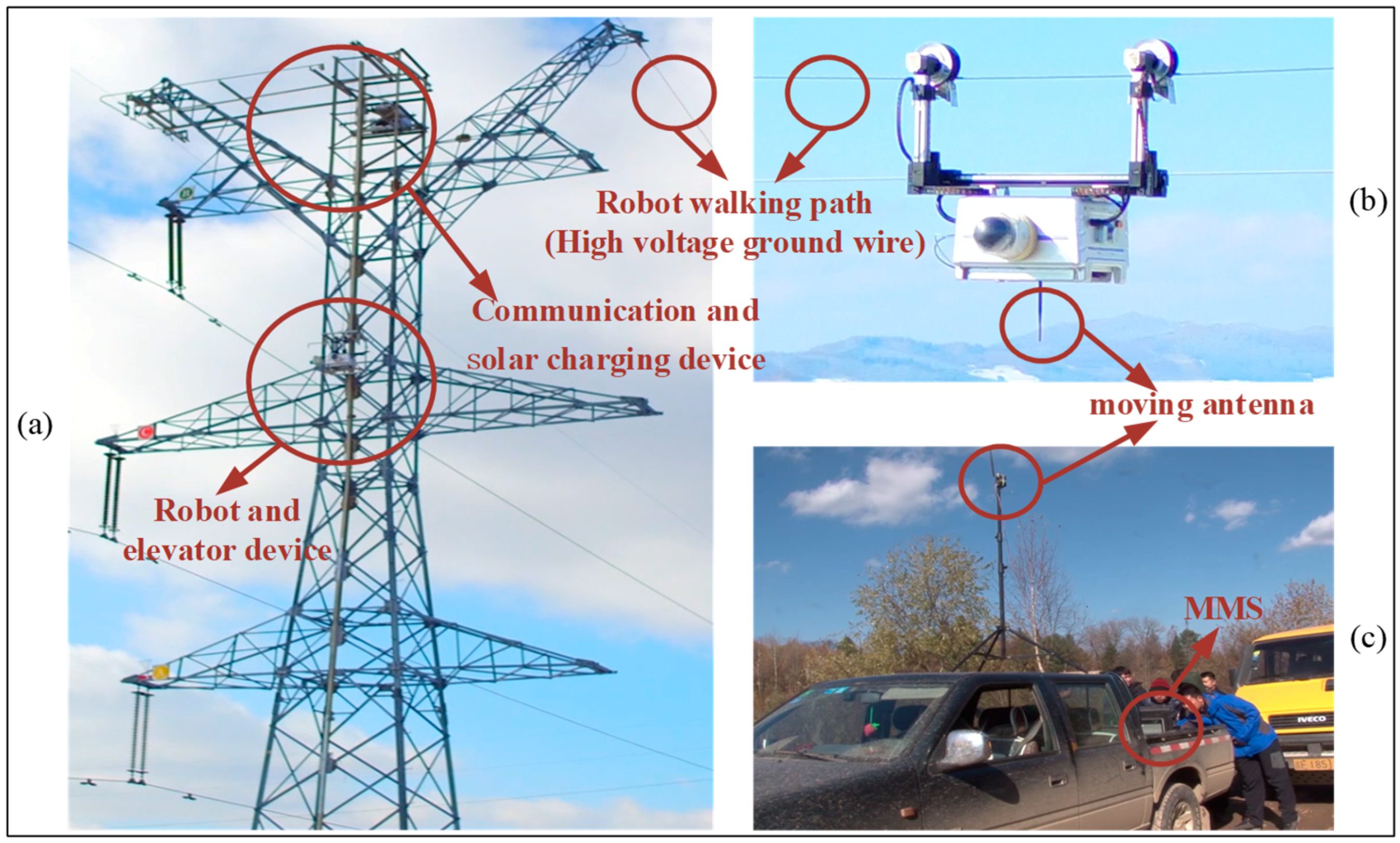
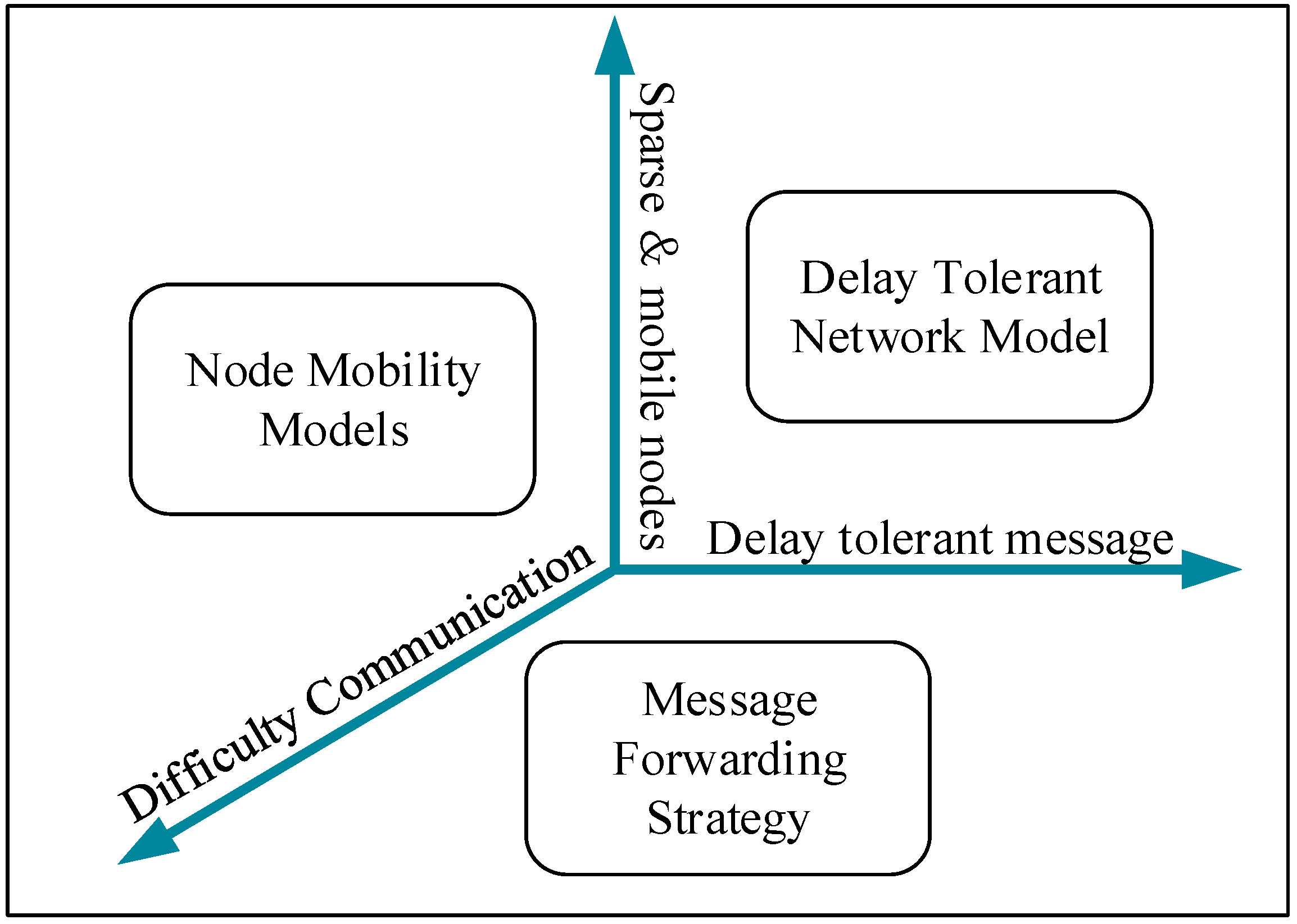
Research directions of DTSN.
Figure 2.
Research directions of DTSN.
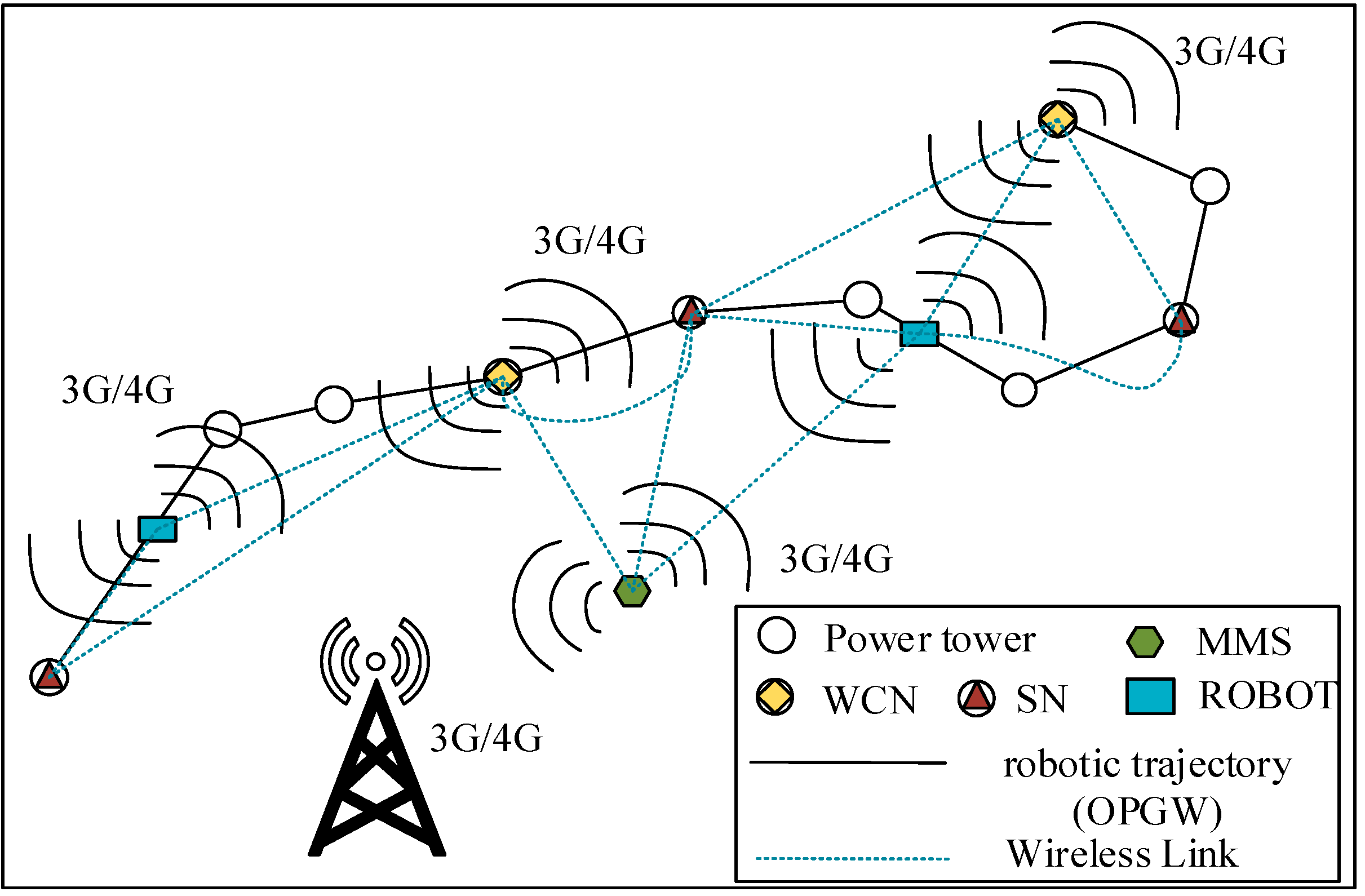
Figure 3.
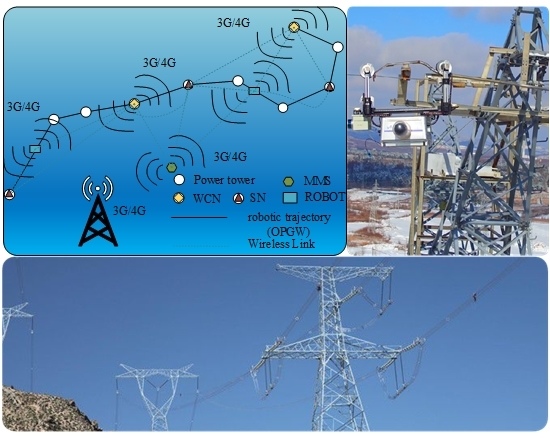
Robot Delay-Tolerant Sensor Network (RDTSN). OPGW, Optical Fiber Composite Overhead Ground Wire.
Figure 3.
Robot Delay-Tolerant Sensor Network (RDTSN). OPGW, Optical Fiber Composite Overhead Ground Wire.
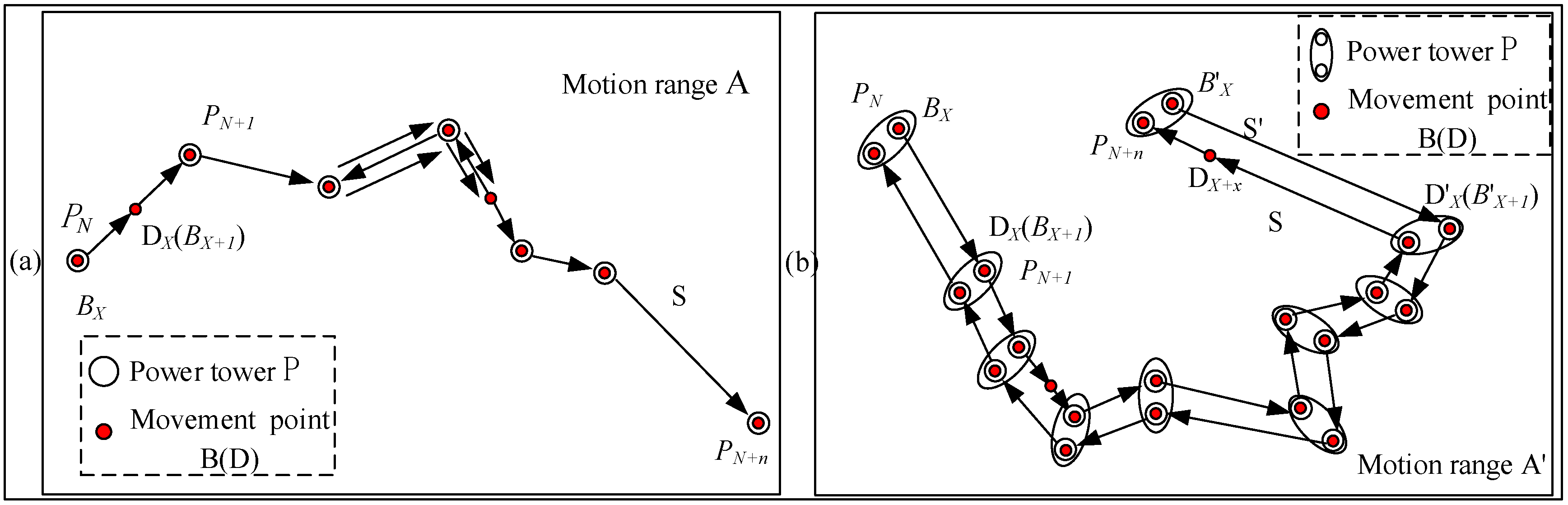
Figure 4.
Tow movement models of robot. (a) PRW movement model; (b) BPRW movement model.
Figure 4.
Tow movement models of robot. (a) PRW movement model; (b) BPRW movement model.
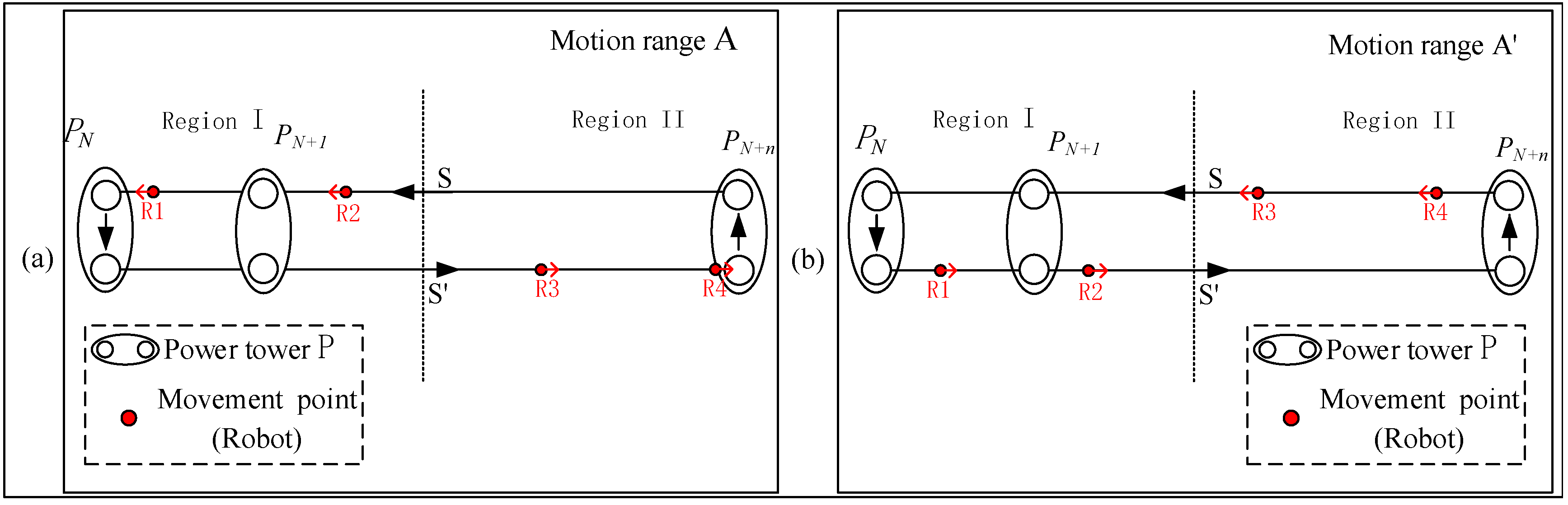
Figure 5.
BMI movement models of robot. (a) State one; (b) state two.
Figure 5.
BMI movement models of robot. (a) State one; (b) state two.
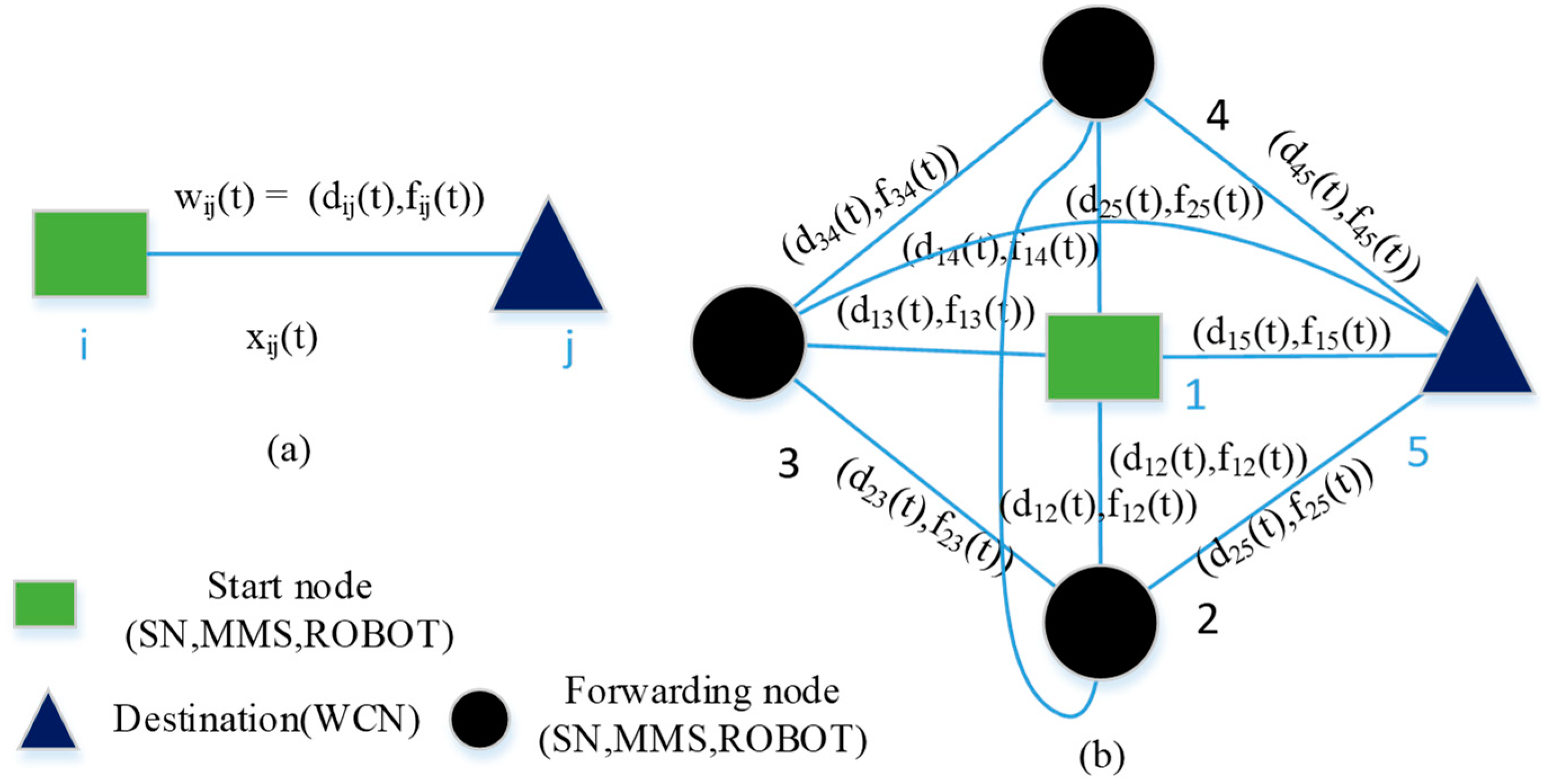
Figure 6.
Network representation. (a) Two-node graph; (b) five-node graph.
Figure 6.
Network representation. (a) Two-node graph; (b) five-node graph.
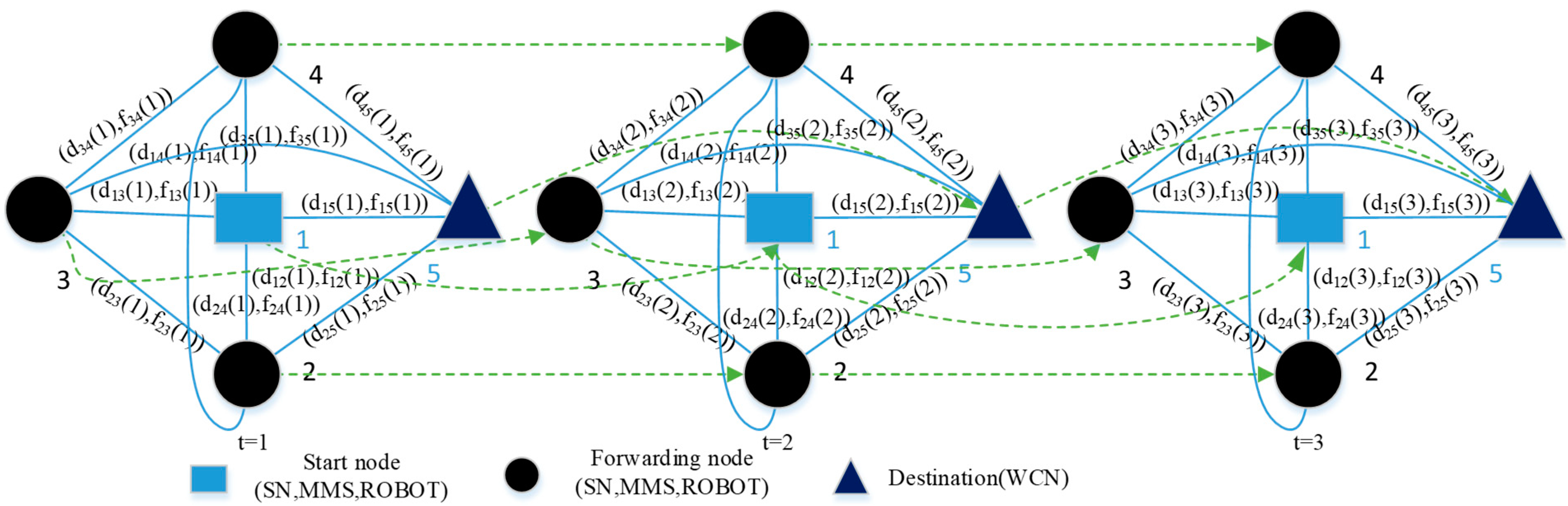
Figure 7.
Network extended graph with the availability weights through time represented at once.
Figure 7.
Network extended graph with the availability weights through time represented at once.
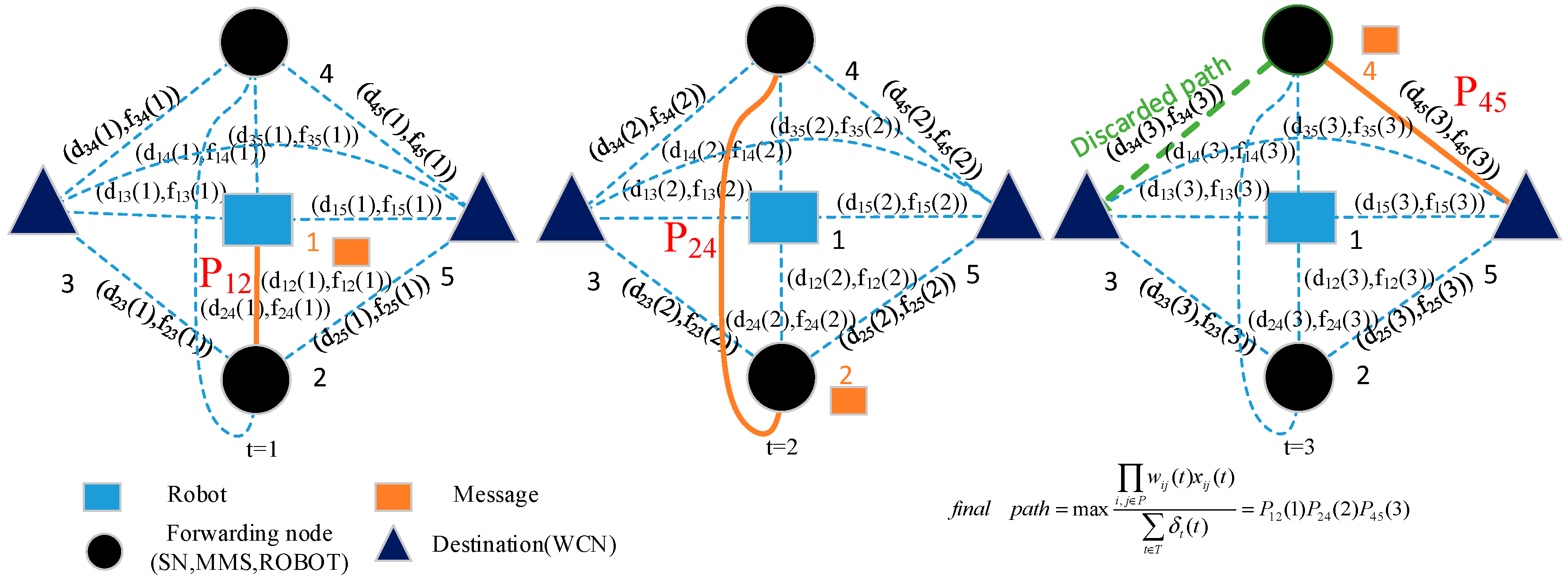
Figure 8.
Network routing solution.
Figure 8.
Network routing solution.
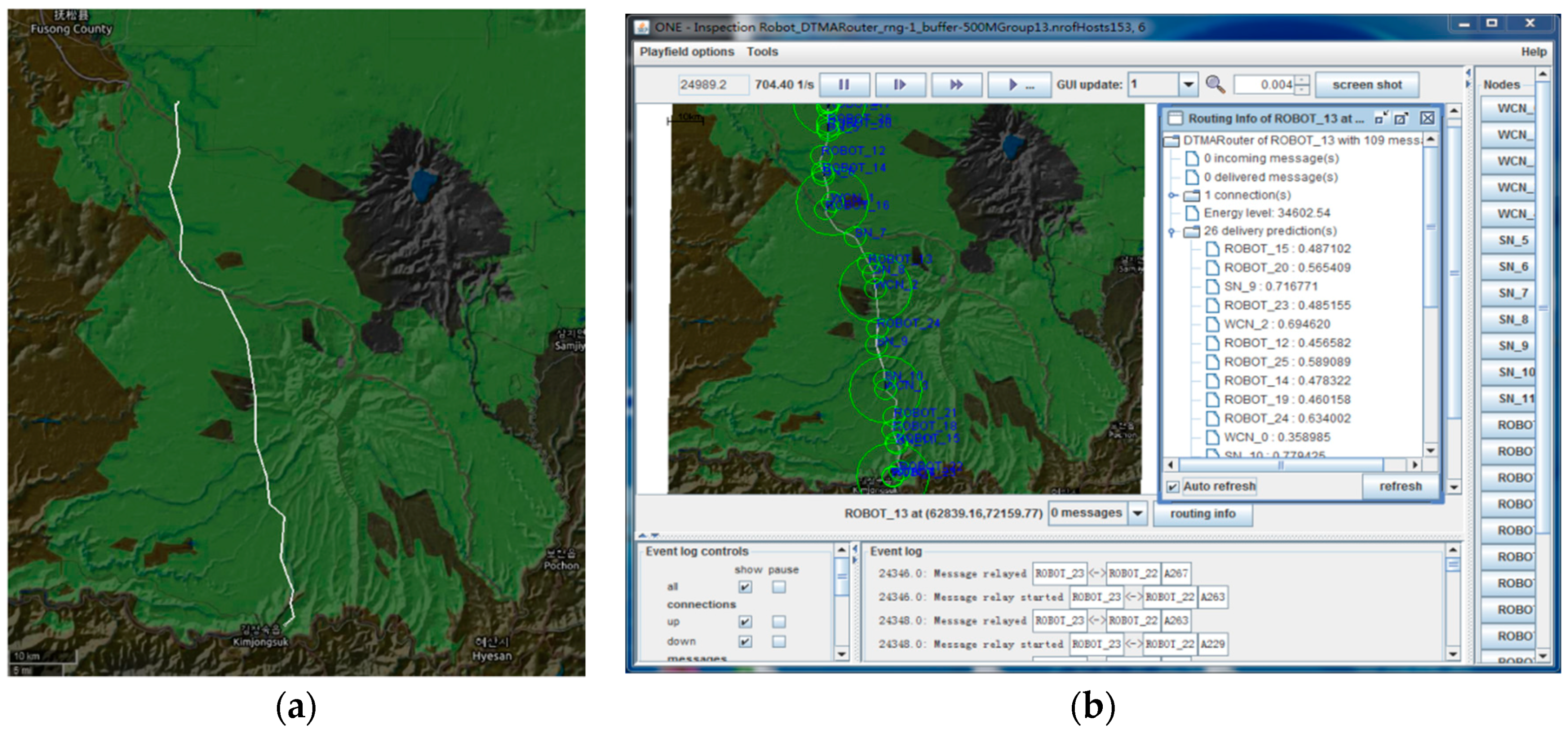
Figure 9.
RDTSN scenarios map. (a) Scenarios map from Open Street Map; (b) simulation interface of the RDTSN in the ONE (Opportunistic Network Environment) simulator.
Figure 9.
RDTSN scenarios map. (a) Scenarios map from Open Street Map; (b) simulation interface of the RDTSN in the ONE (Opportunistic Network Environment) simulator.
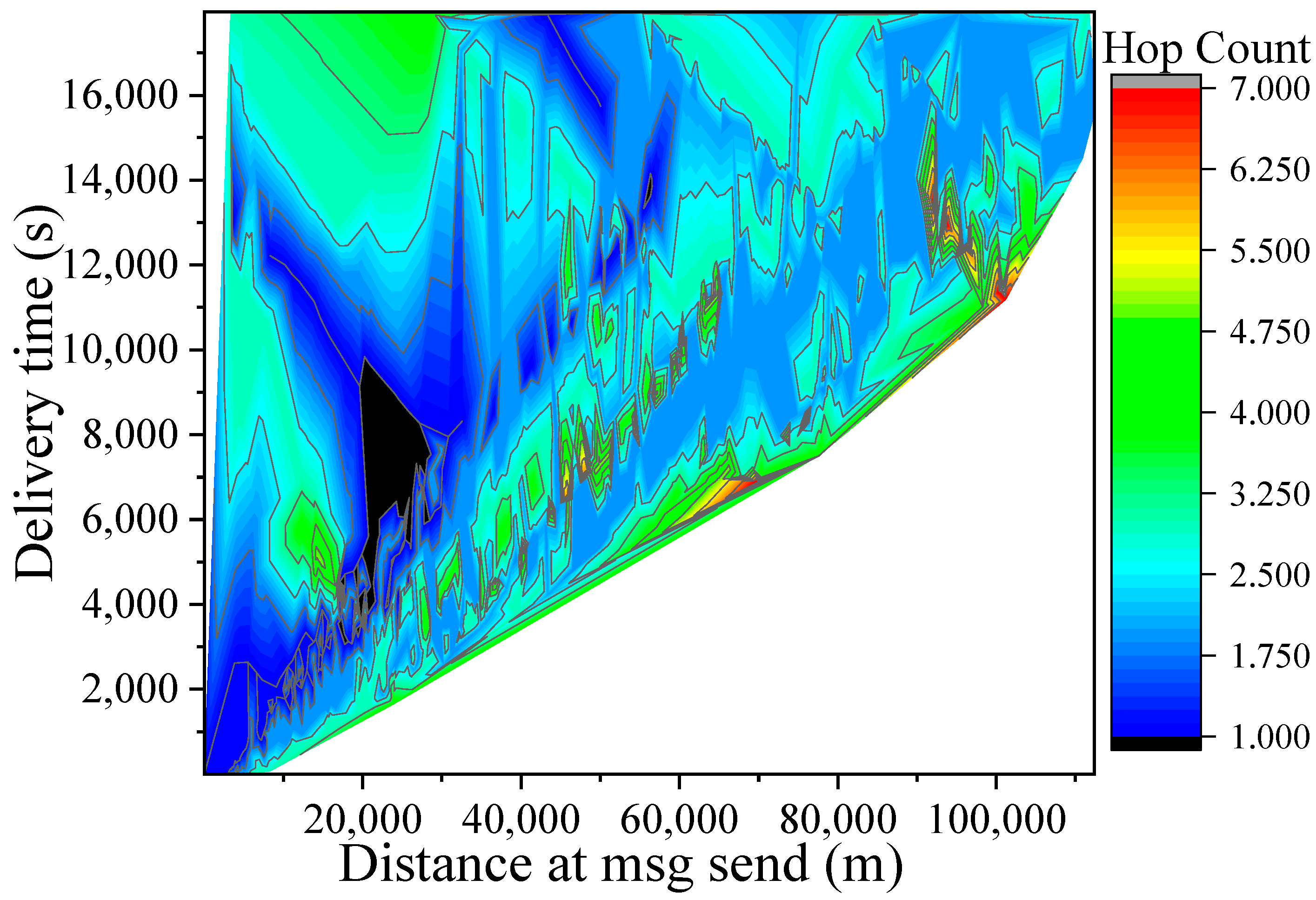
Figure 10.
Results of the scenario of default value, delivery time and distance at message send and hop count.
Figure 10.
Results of the scenario of default value, delivery time and distance at message send and hop count.
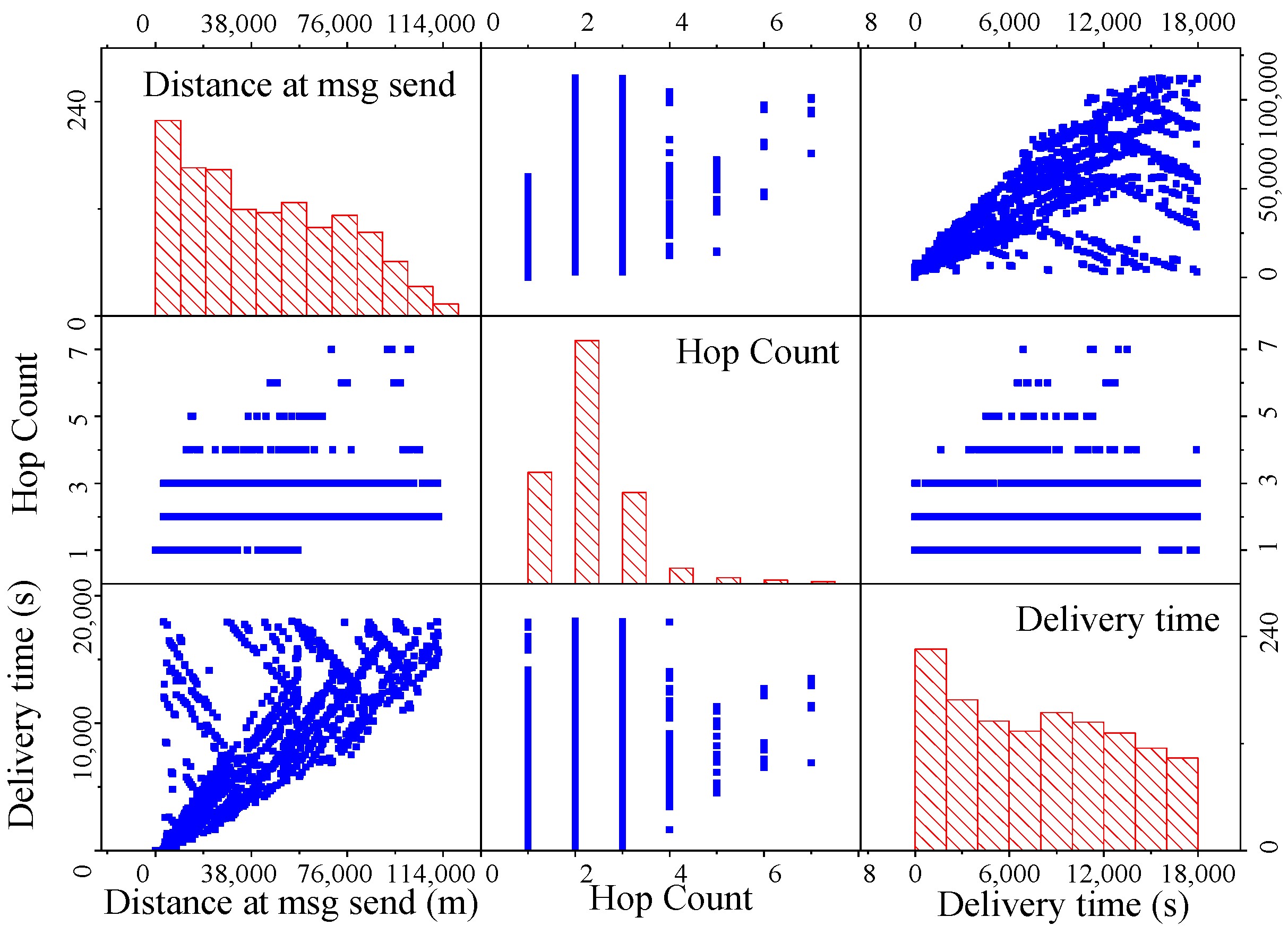
Figure 11.
Statistical analysis data of delivery time and distance at message send and hop count, the blue scatter point is the result of data distribution, the red histogram is the statistical result of the data distribution.
Figure 11.
Statistical analysis data of delivery time and distance at message send and hop count, the blue scatter point is the result of data distribution, the red histogram is the statistical result of the data distribution.
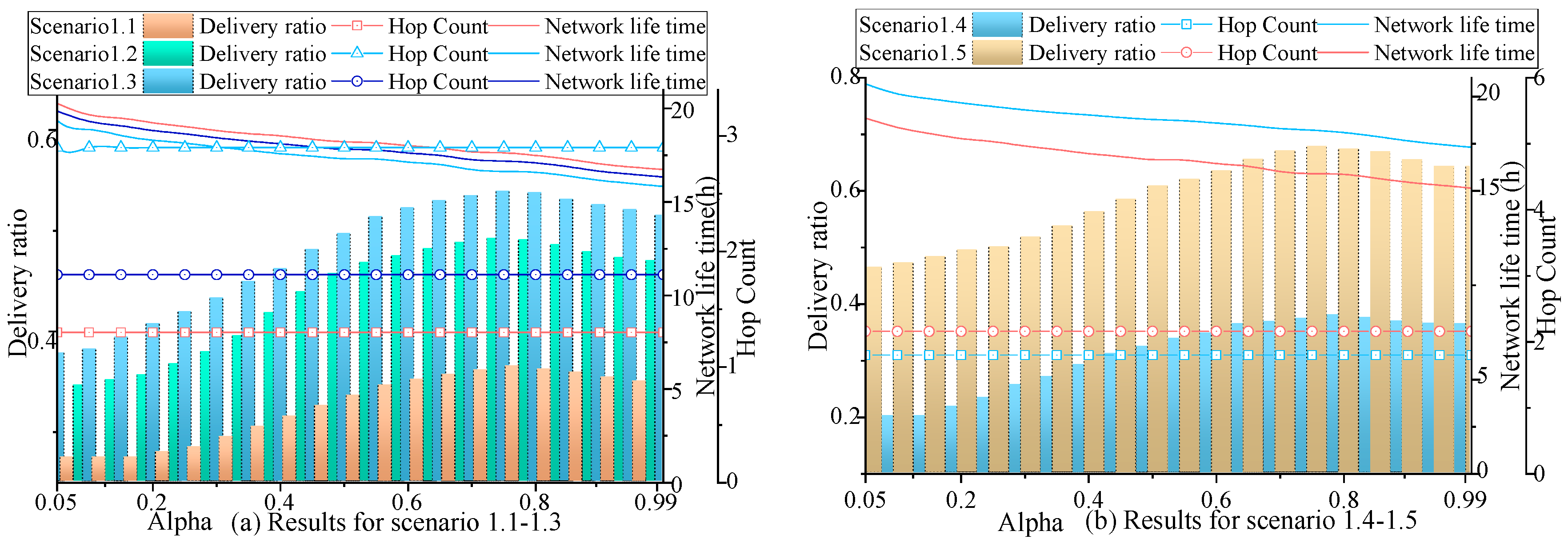
Figure 12.
Results of Scenario 1 of DTMA. (a) Delivery ratio, network life time and hop count with different alpha in Scenario 1.1–1.3; (b) delivery ratio, network life time and hop count with different alpha in Scenario 1.4–1.5.
Figure 12.
Results of Scenario 1 of DTMA. (a) Delivery ratio, network life time and hop count with different alpha in Scenario 1.1–1.3; (b) delivery ratio, network life time and hop count with different alpha in Scenario 1.4–1.5.
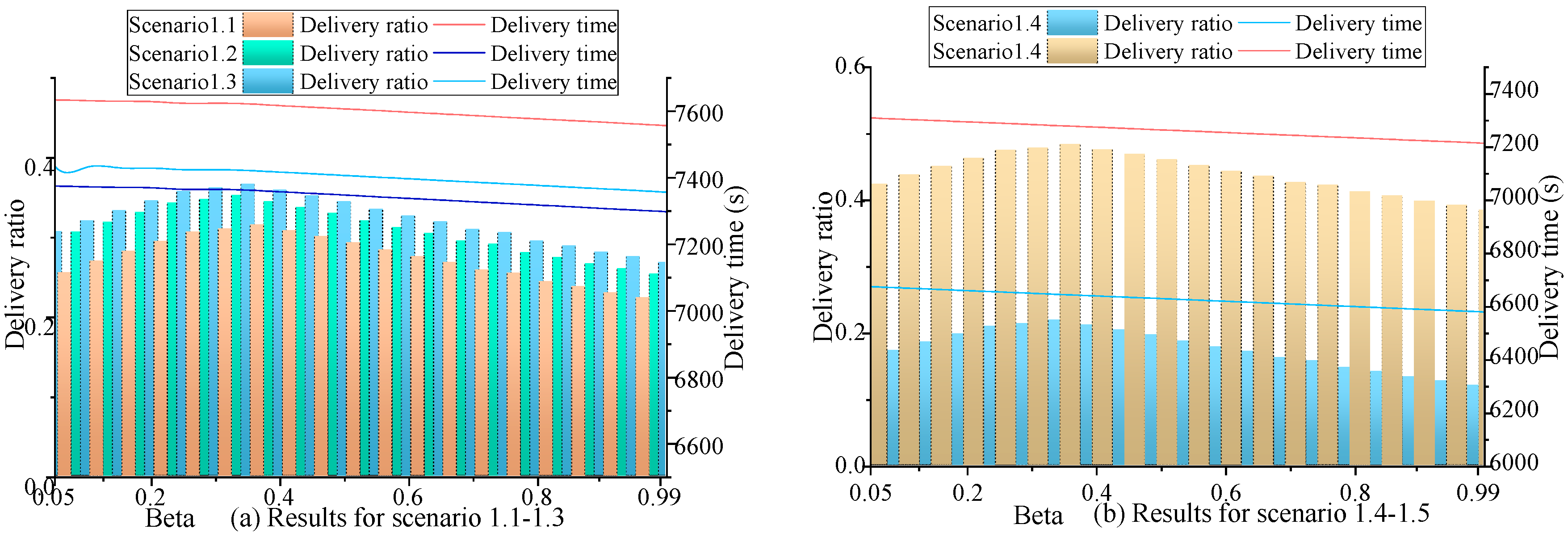
Figure 13.
Results of Scenario 1 of Prophet V2. (a) Delivery ratio, delivery time with different beta in Scenario 1.1–1.3; (b) delivery ratio, deliver time with different beta in Scenario 1.4–1.5.
Figure 13.
Results of Scenario 1 of Prophet V2. (a) Delivery ratio, delivery time with different beta in Scenario 1.1–1.3; (b) delivery ratio, deliver time with different beta in Scenario 1.4–1.5.
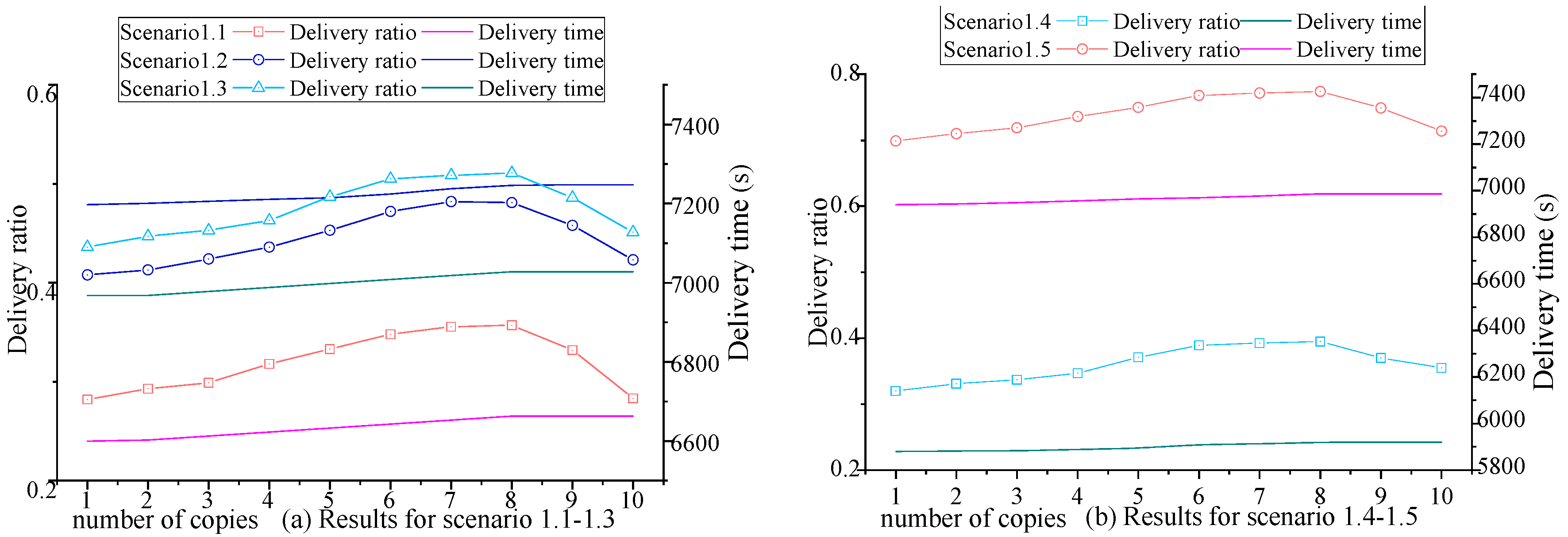
Figure 14.
Results of Scenario 1 of Spray and Wait. (a) Delivery ratio, delivery time with different number of copies in Scenario 1.1–1.3; (b) delivery ratio, deliver time with different number of copies in Scenario 1.4–1.5.
Figure 14.
Results of Scenario 1 of Spray and Wait. (a) Delivery ratio, delivery time with different number of copies in Scenario 1.1–1.3; (b) delivery ratio, deliver time with different number of copies in Scenario 1.4–1.5.
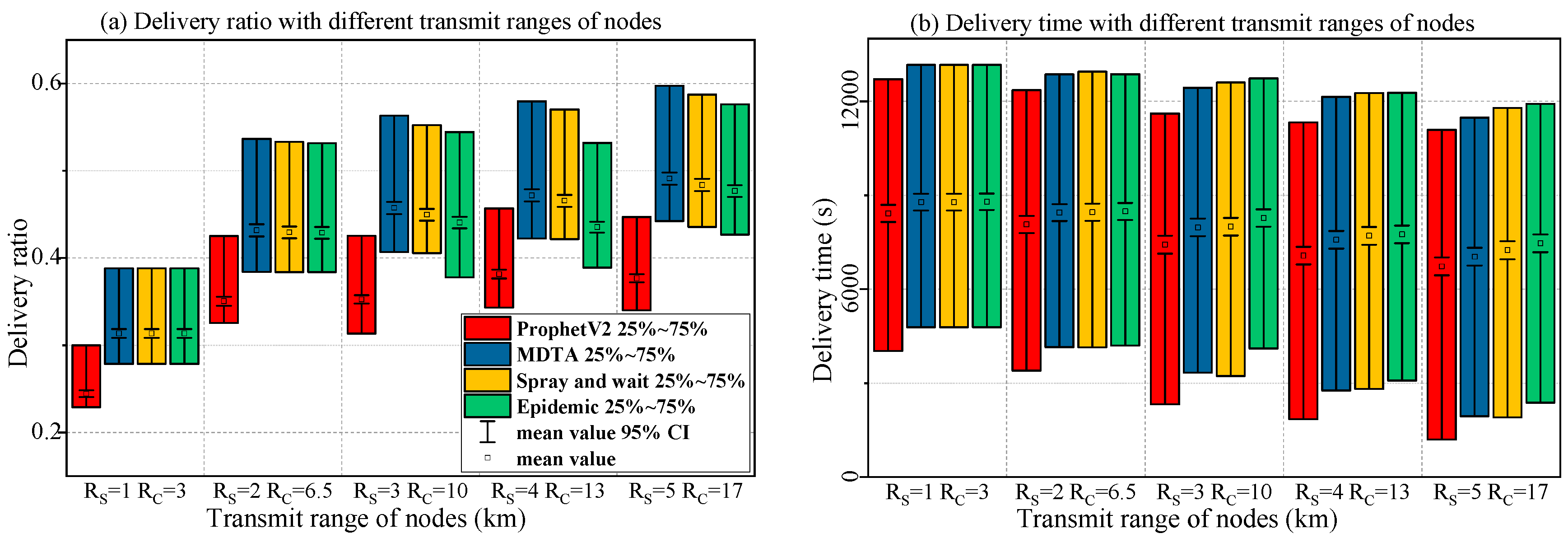
Figure 15.
Results of Scenario 2.1. (a) Delivery ratio with different transmission ranges of nodes; (b) delivery time in seconds with different transmission ranges of nodes.
Figure 15.
Results of Scenario 2.1. (a) Delivery ratio with different transmission ranges of nodes; (b) delivery time in seconds with different transmission ranges of nodes.
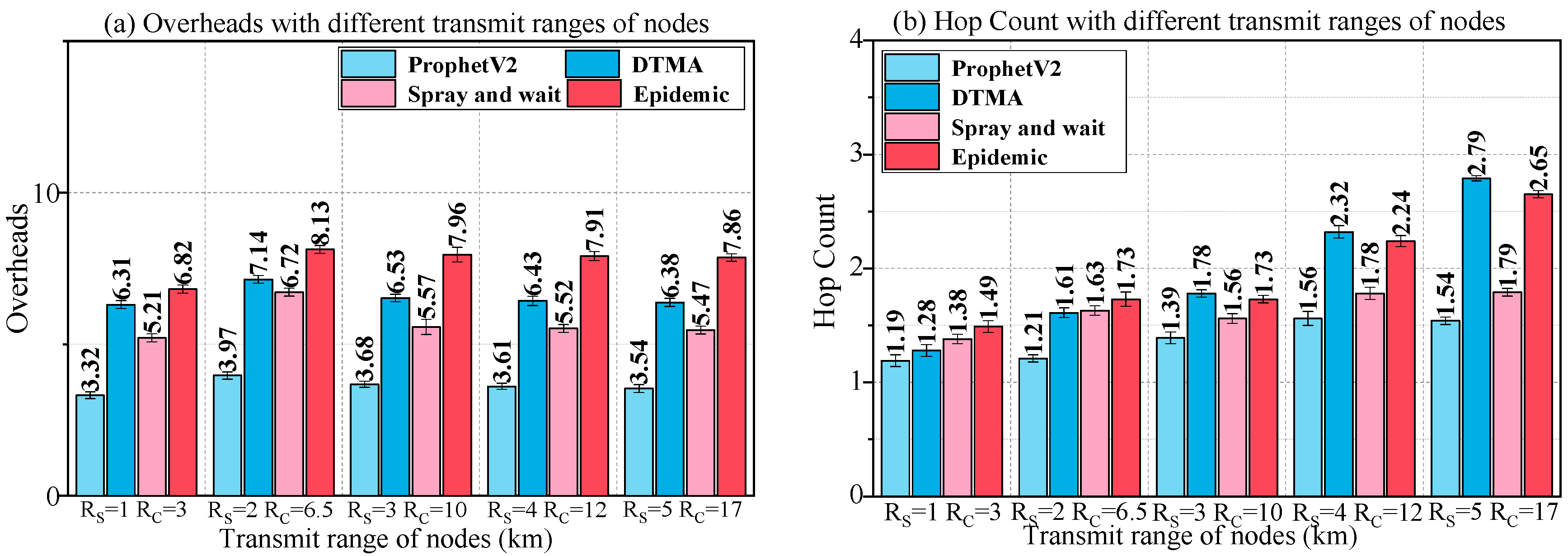
Figure 16.
Results of Scenario 2.1. (a) Overheads with different transmission ranges of nodes; (b) hop count with different transmission ranges of nodes.
Figure 16.
Results of Scenario 2.1. (a) Overheads with different transmission ranges of nodes; (b) hop count with different transmission ranges of nodes.
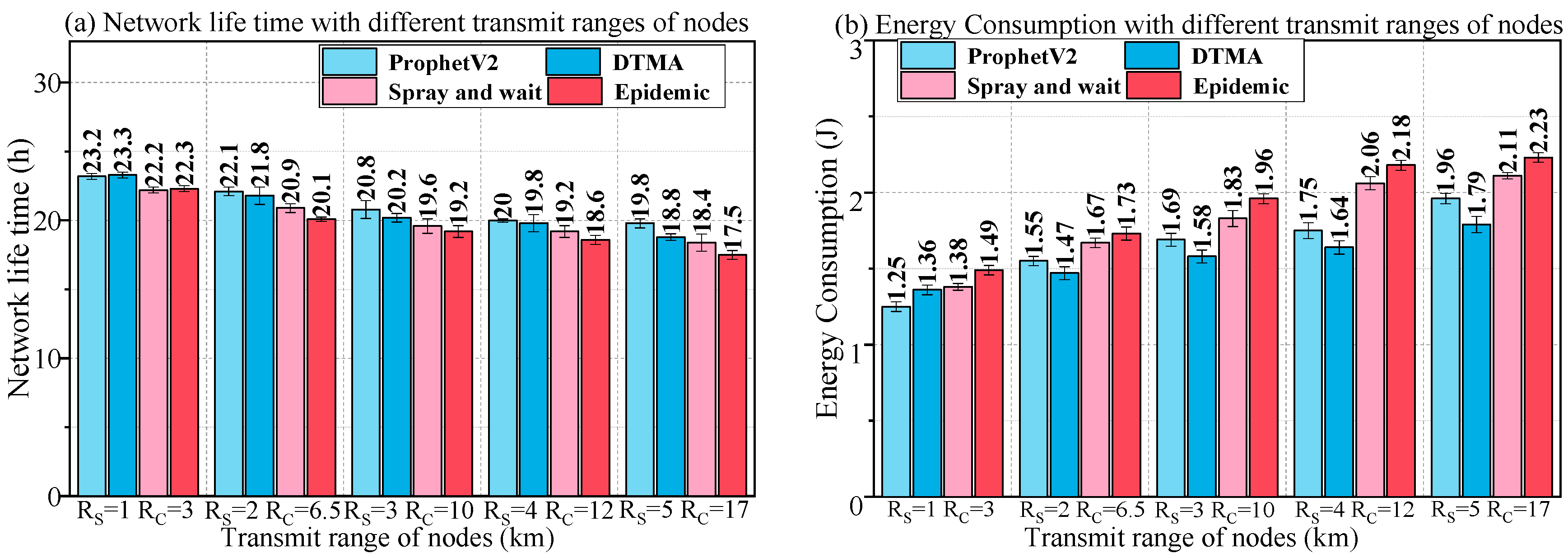
Figure 17.
Results of Scenario 2.1. (a) Network life time with different transmission ranges of nodes; (b) energy consumption with different transmission ranges of nodes.
Figure 17.
Results of Scenario 2.1. (a) Network life time with different transmission ranges of nodes; (b) energy consumption with different transmission ranges of nodes.
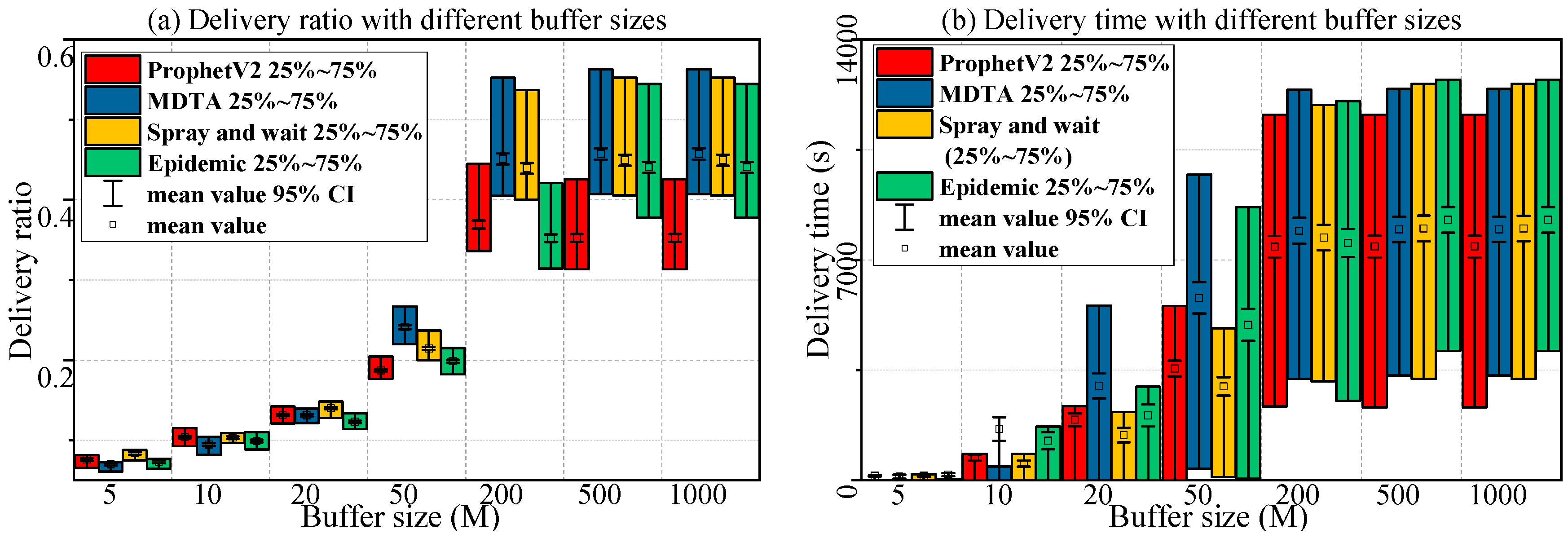
Figure 18.
Results of Scenario 2.2. (a) Delivery ratio with different buffer sizes; (b) delivery time in seconds with different buffer sizes.
Figure 18.
Results of Scenario 2.2. (a) Delivery ratio with different buffer sizes; (b) delivery time in seconds with different buffer sizes.
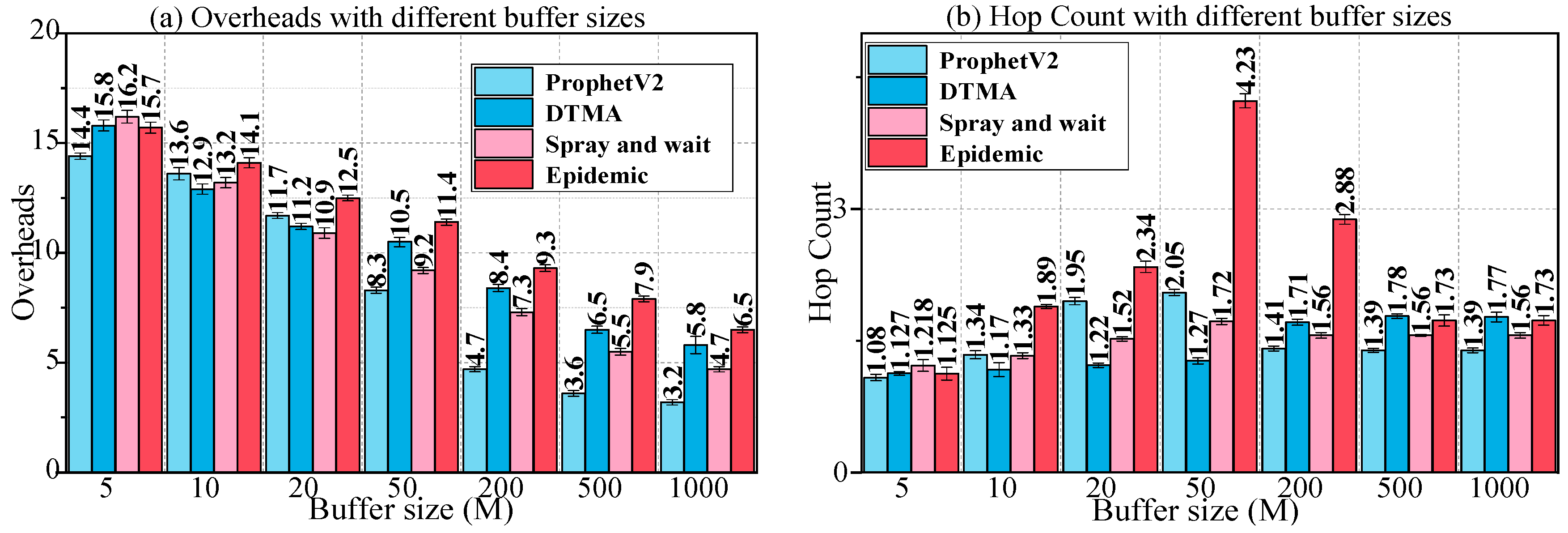
Figure 19.
Results of Scenario 2.2. (a) Overheats with different buffer sizes; (b) hop count with different buffer sizes.
Figure 19.
Results of Scenario 2.2. (a) Overheats with different buffer sizes; (b) hop count with different buffer sizes.
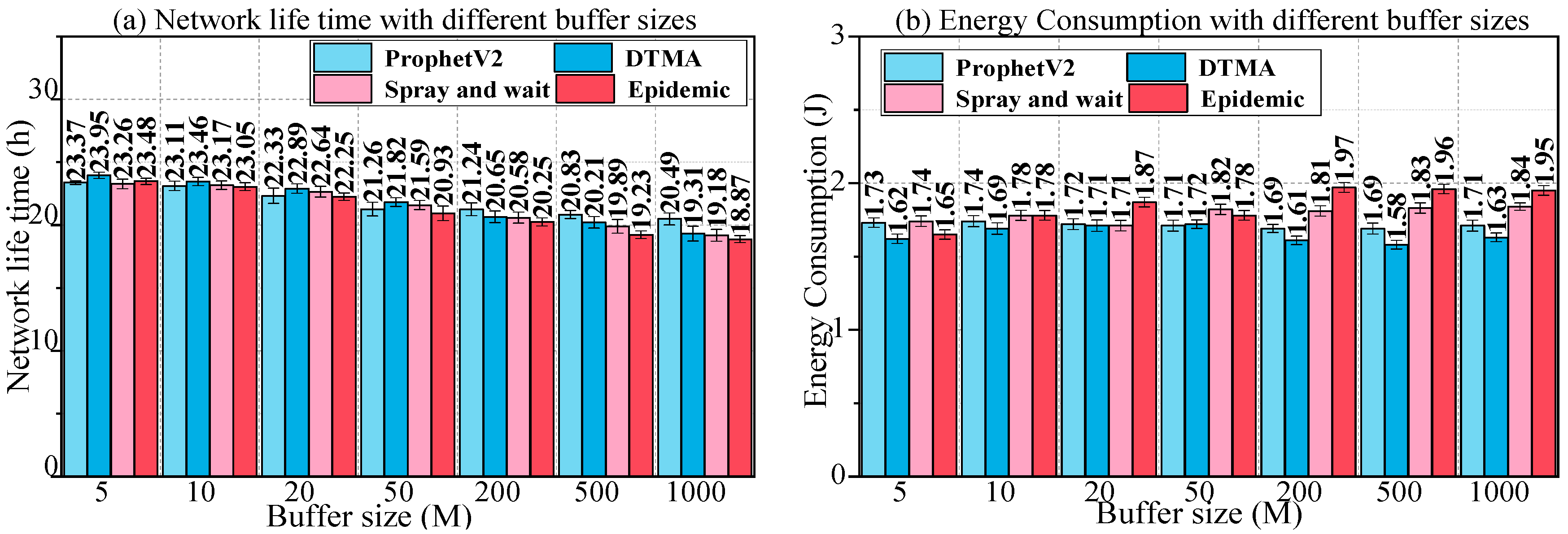
Figure 20.
Results of Scenario 2.2. (a) Network life time with different number of robots; (b) energy consumption with different number of robots.
Figure 20.
Results of Scenario 2.2. (a) Network life time with different number of robots; (b) energy consumption with different number of robots.
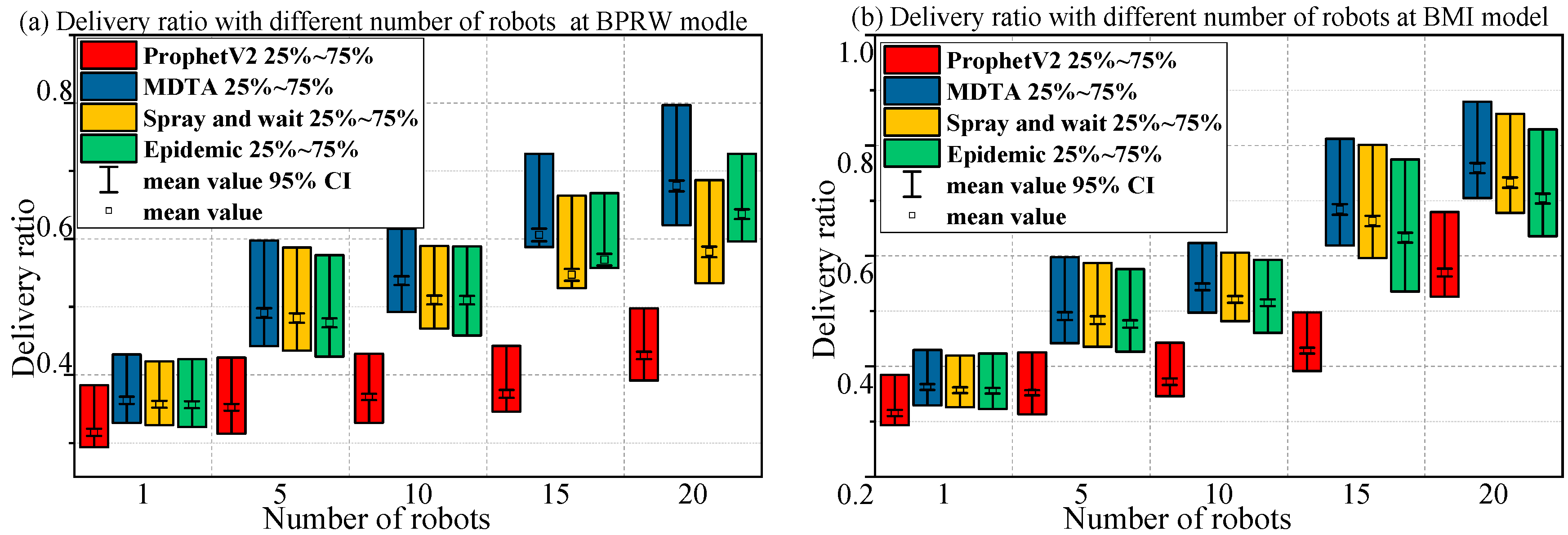
Figure 21.
Results of Scenario 3, Delivery ratio with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 21.
Results of Scenario 3, Delivery ratio with different number of robots. (a) BPRW movement model; (b) BMI movement model.
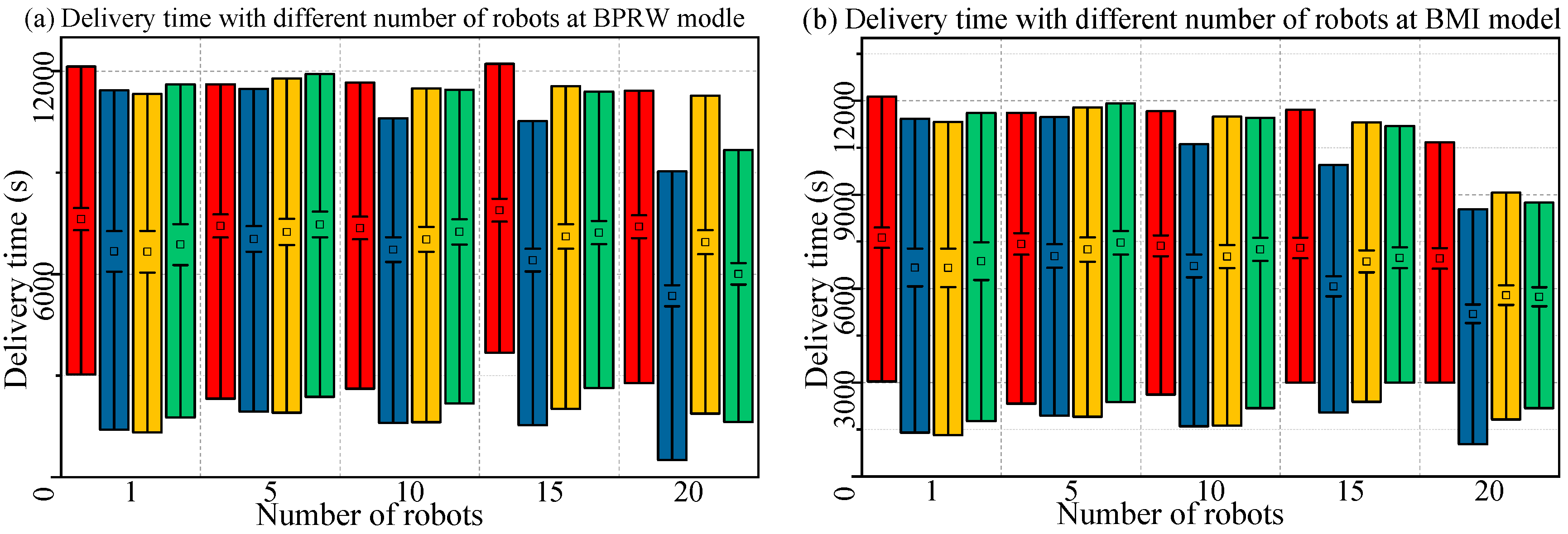
Figure 22.
Results of Scenario 3, Delivery time with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 22.
Results of Scenario 3, Delivery time with different number of robots. (a) BPRW movement model; (b) BMI movement model.
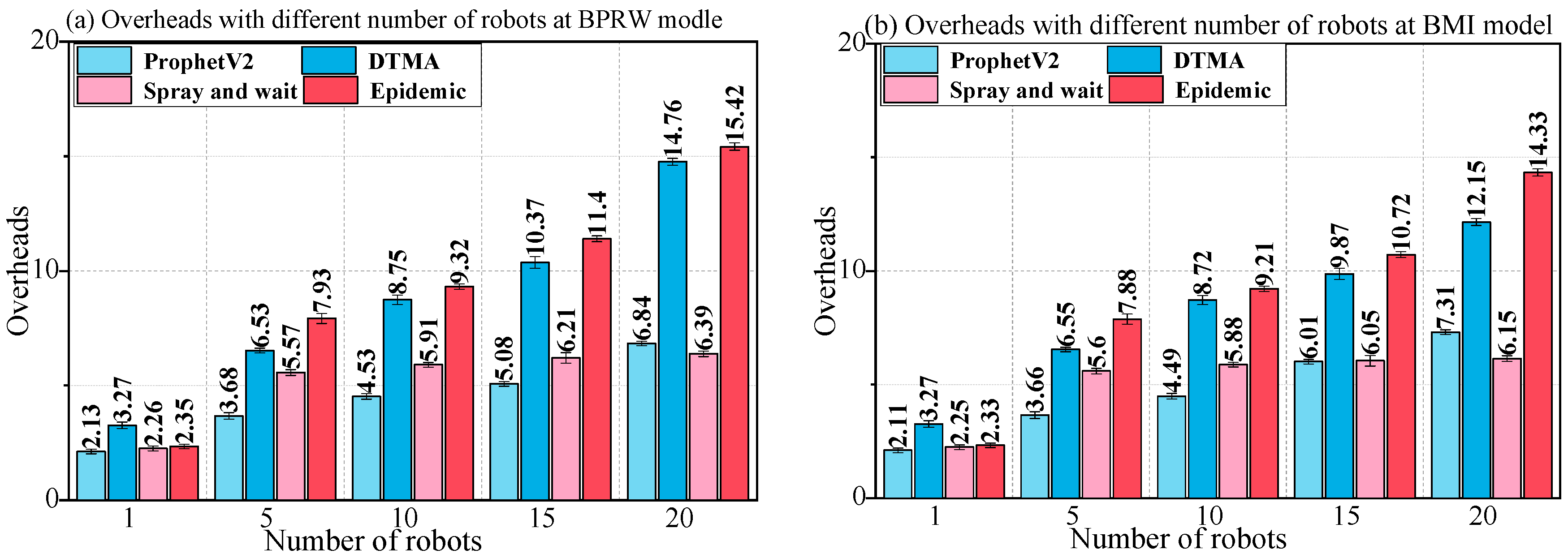
Figure 23.
Results of Scenario 3, Overheads with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 23.
Results of Scenario 3, Overheads with different number of robots. (a) BPRW movement model; (b) BMI movement model.
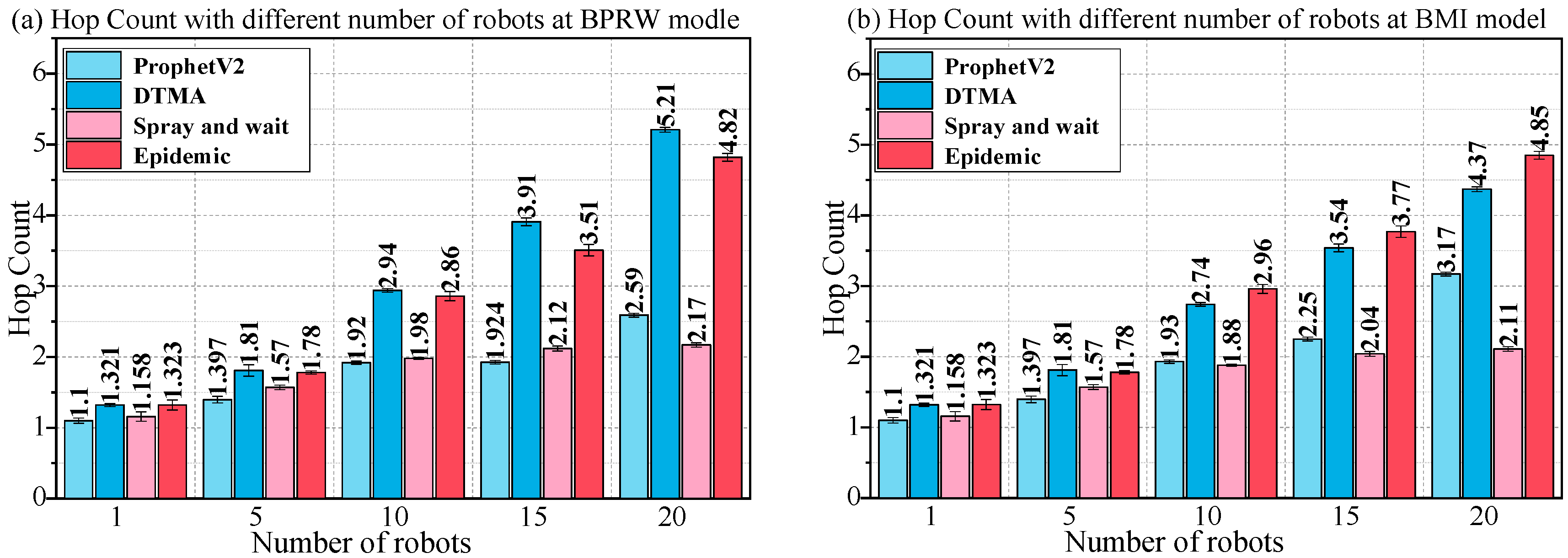
Figure 24.
Results of Scenario 3, Hop count with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 24.
Results of Scenario 3, Hop count with different number of robots. (a) BPRW movement model; (b) BMI movement model.
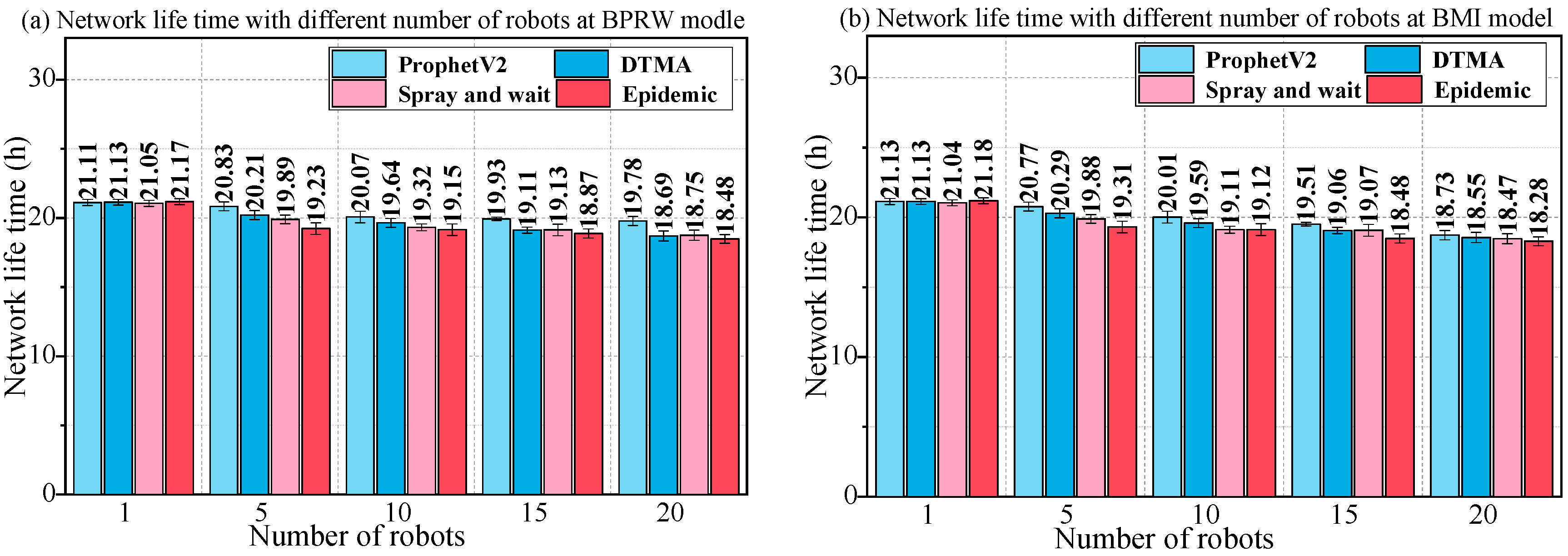
Figure 25.
Results of Scenario 3, Network life time with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 25.
Results of Scenario 3, Network life time with different number of robots. (a) BPRW movement model; (b) BMI movement model.
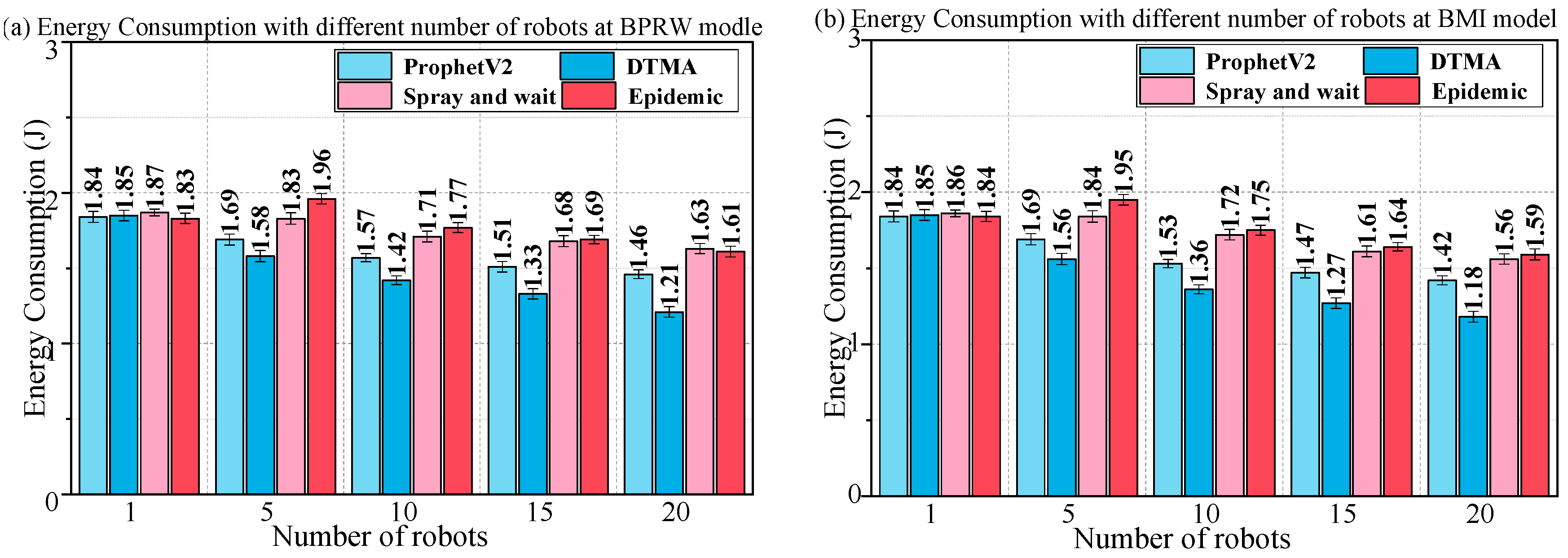
Figure 26.
Results of Scenario 3, Energy consumption with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 26.
Results of Scenario 3, Energy consumption with different number of robots. (a) BPRW movement model; (b) BMI movement model.
Figure 27.
Results of Scenario 3, Delivery ratio with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 27.
Results of Scenario 3, Delivery ratio with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
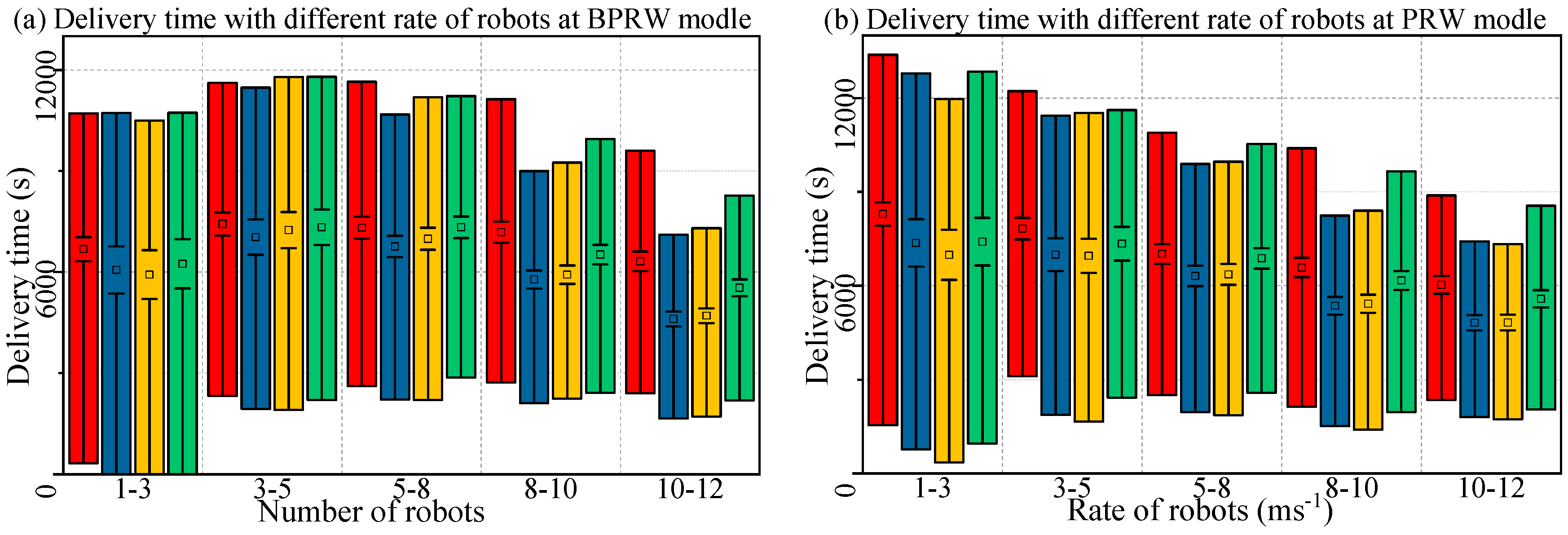
Figure 28.
Results of Scenario 3, Delivery time with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 28.
Results of Scenario 3, Delivery time with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
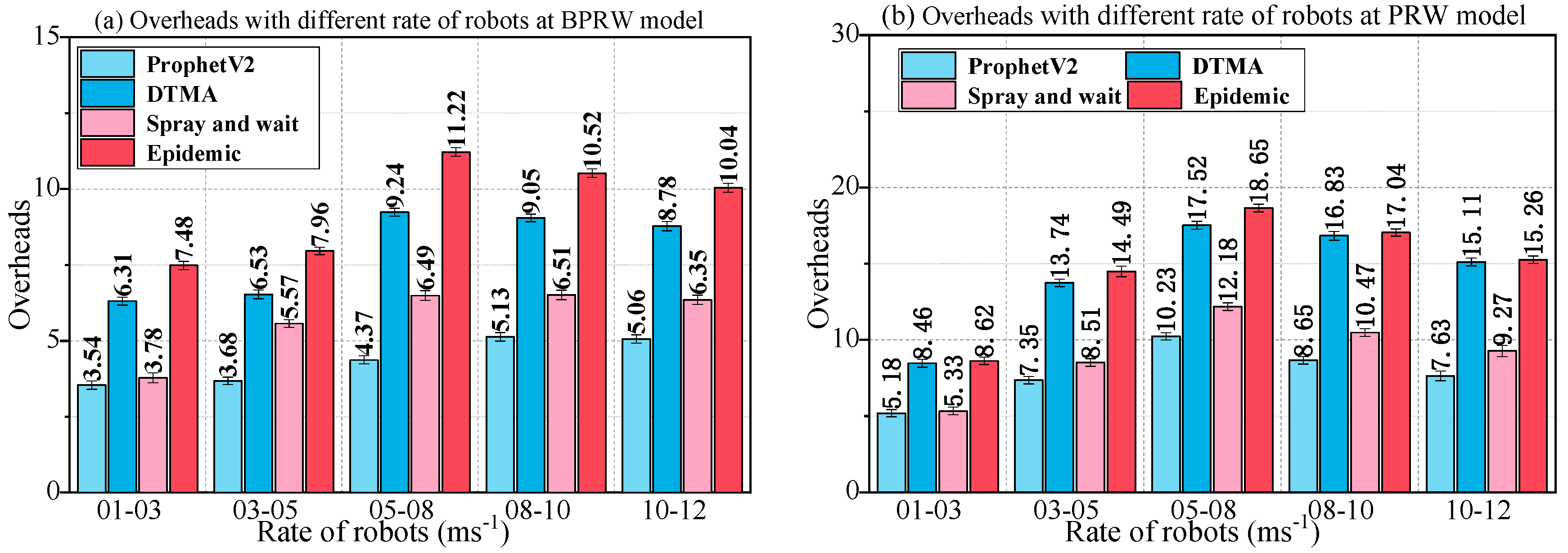
Figure 29.
Results of Scenario 3, Overheads with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 29.
Results of Scenario 3, Overheads with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
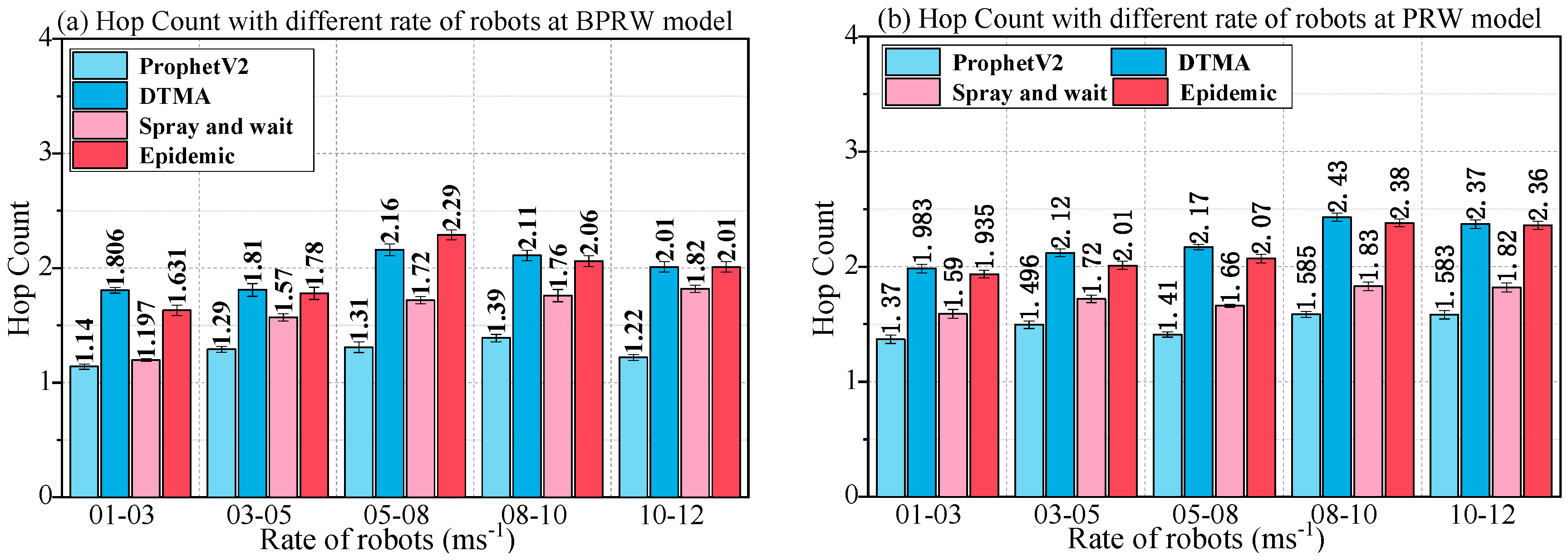
Figure 30.
Results of Scenario 3, Hop count with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 30.
Results of Scenario 3, Hop count with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
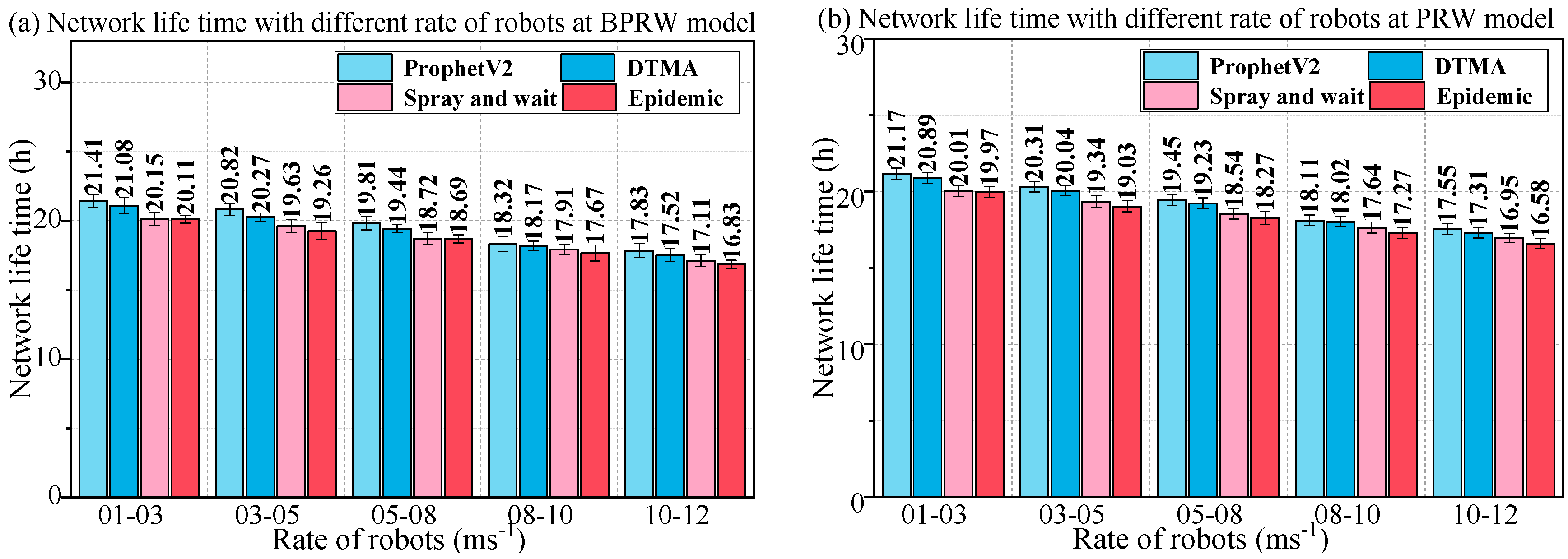
Figure 31.
Results of Scenario 3, Network life time with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 31.
Results of Scenario 3, Network life time with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
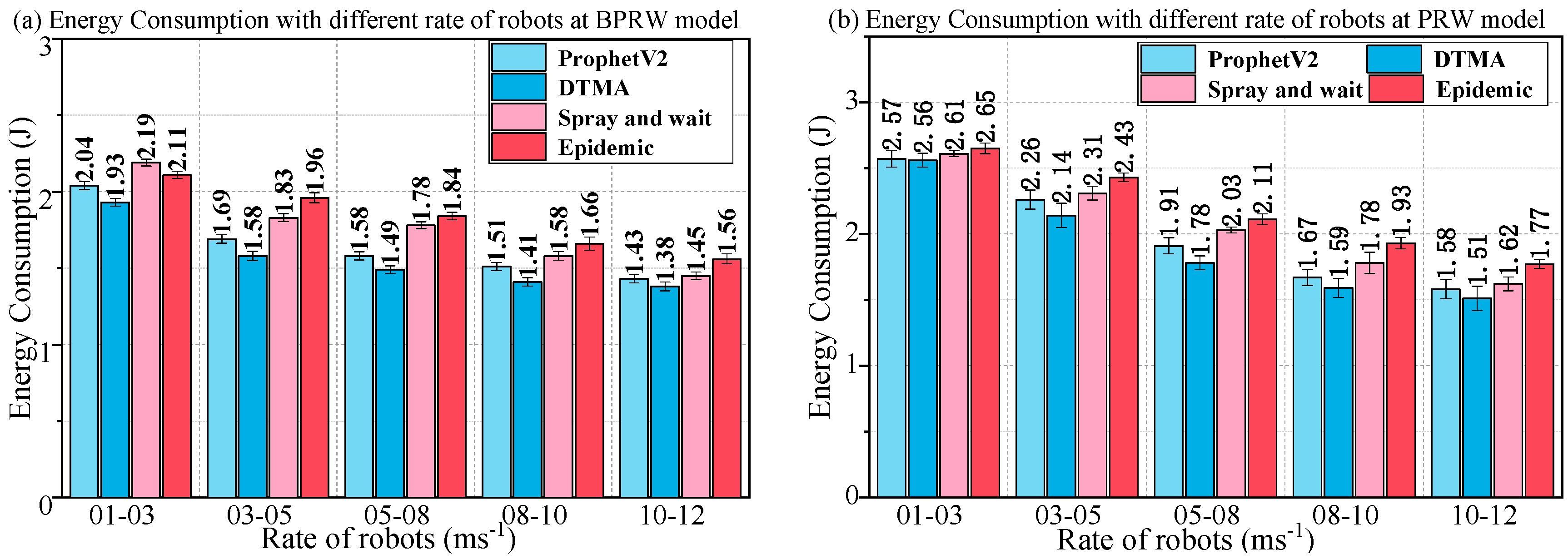
Figure 32.
Results of Scenario 3, Energy consumption with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 32.
Results of Scenario 3, Energy consumption with different rate of robots. (a) BPRW movement model; (b) PRW movement model.
Figure 33.
The field experiments. (a) Robot and static node; (b) MMS, communication device and antenna.
Figure 33.
The field experiments. (a) Robot and static node; (b) MMS, communication device and antenna.
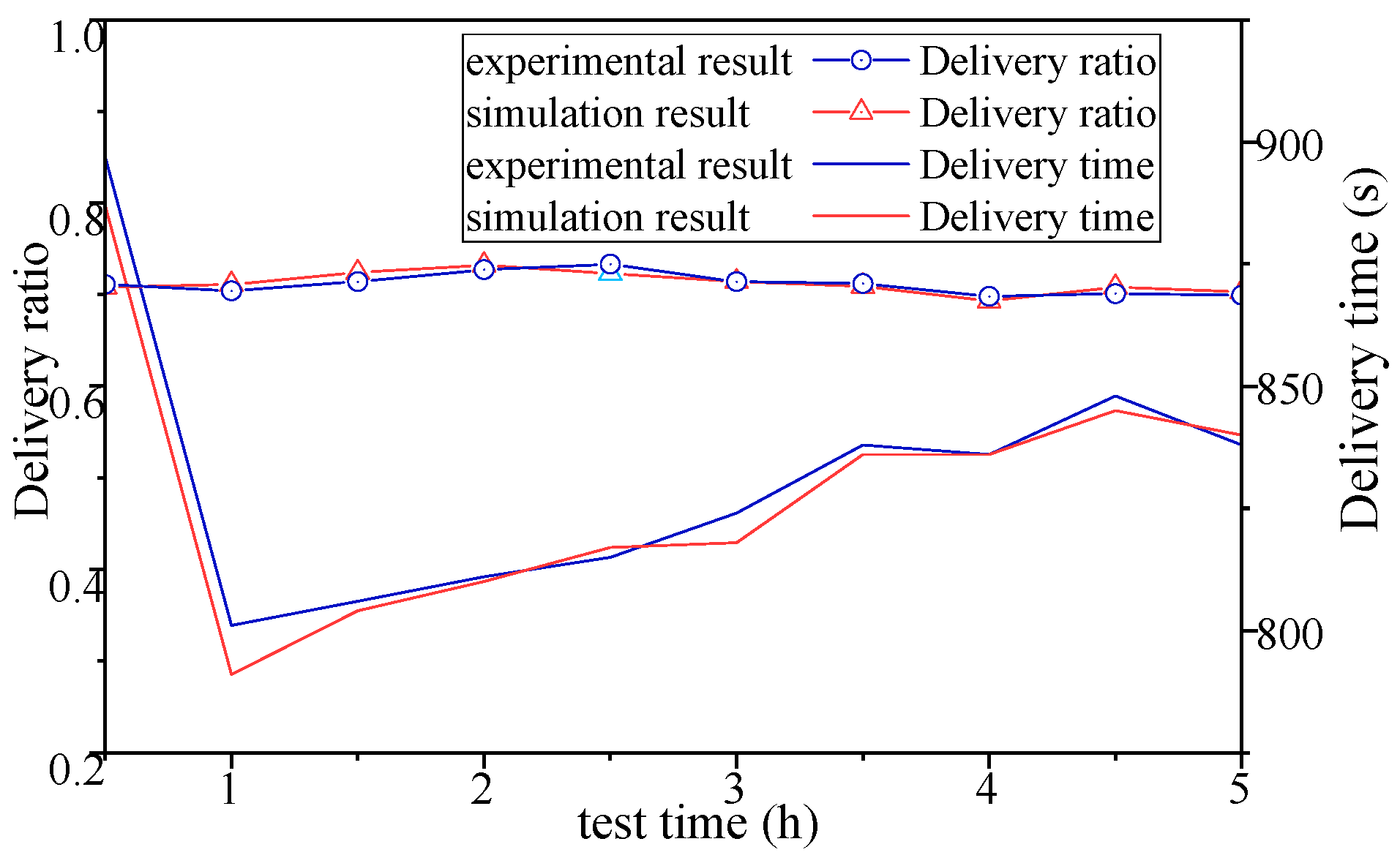
Figure 34.
Result of field experiments and simulations.
Figure 34.
Result of field experiments and simulations.
Table 1.
Default parameters of the simulation.
Table 1.
Default parameters of the simulation.
| Parameter | Default Value |
|---|
| Network area size (m × m) | 74,500 × 143,400 |
| Simulation run time (s) | 86,400 |
| Number of Robots | 5 nodes |
| Number of SNs | 7 nodes |
| Number of WCNs | 5 nodes |
| RC (m) | 10,000 |
| RS (m) | 3000 |
| Movement rate of Robot (m/s) | 3–5 |
| Tpause (s) | 10–30 |
| Buffer size (M) | 500 |
| Message size (Kb) | 2000 |
| Robot message interval (s) | 60, 120 |
| SNs message interval (s) | 1800, 3600 |
| Source nodes | Robot, SNs |
| Destination nodes | WCNs |
| Movement model | BPRW |
| Alpha and Beta of DTMA | 0.78, 0.22 |
| Beta of Prophet V2 | 0.36 |
| Spray and Wait Router Copies | 8 |
Table 2.
Parameters of Scenario 1.
Table 2.
Parameters of Scenario 1.
| Parameter | Scenario 1.1 | Scenario 1.2 | Scenario 1.3 | Scenario 1.4 | Scenario 1.5 |
|---|
| Numbers of robots | 1 | 5 | 10 | 5 | 5 |
| Movement rate (ms−1) | 3–5 | 3–5 | 3–5 | 1–3 | 5–8 |
Table 3.
Parameters of Scenario 2.1.
Table 3.
Parameters of Scenario 2.1.
| Parameter (km) | Rs1, Rc1 | Rs2, Rc2 | Rs3, Rc3 | Rs4, Rc4 | Rs5, Rc5 |
|---|
| Transmission range | 1, 3 | 2, 6.5 | 3, 10 | 4, 13 | 5, 17 |
Table 4.
Parameters of Scenario 2.2.
Table 4.
Parameters of Scenario 2.2.
| Parameter (M) | Buffer 1 | Buffer 2 | Buffer 3 | Buffer 4 | Buffer 5 | Buffer 6 | Buffer 7 |
|---|
| Buffer size | 5 | 10 | 20 | 50 | 200 | 500 | 1000 |
Table 5.
Parameters of Scenario 3.1.
Table 5.
Parameters of Scenario 3.1.
| Parameter | Motion 1 | Motion 2 | Motion 3 | Motion 4 | Motion 5 |
|---|
| Number of robots | 1 | 5 | 10 | 15 | 20 |
| Movement model | BPRW | BPRW | BPRW | BPRW | BPRW |
Table 6.
Parameters of Scenario 3.2.
Table 6.
Parameters of Scenario 3.2.
| Parameter | Motion 1 | Motion 2 | Motion 3 | Motion 4 | Motion 5 |
|---|
| Number of robots | 1 | 5 | 10 | 15 | 20 |
| Movement model | BMI | BMI | BMI | BMI | BMI |
Table 7.
Parameters of Scenario 3.3.
Table 7.
Parameters of Scenario 3.3.
| Parameter (m/s) | Motion 1 | Motion 2 | Motion 3 | Motion 4 | Motion 5 |
|---|
| Movement rate | 1–3 | 3–5 | 5–8 | 8–10 | 10–12 |
| Movement model | BPRW | BPRW | BPRW | BPRW | BPRW |
Table 8.
Parameters of Scenario 3.4.
Table 8.
Parameters of Scenario 3.4.
| Parameter (m/s) | Motion 1 | Motion 2 | Motion 3 | Motion 4 | Motion 5 |
|---|
| Movement rate | 1–3 | 3–5 | 5–8 | 8–10 | 10–12 |
| Movement model | PRW | PRW | PRW | PRW | PRW |
Table 9.
Default parameters of field experiment.
Table 9.
Default parameters of field experiment.
| Parameter | Default Value |
|---|
| Network area size (m × m) | 1000 × 15,000 |
| Test time (h) | 5 |
| Number of Robots | 2 nodes |
| Number of SNs | 2 nodes |
| Number of WCNs | 1 nodes |
| RC (m) | 3000 |
| RS (m) | 1000 |
| Movement rate of Robot (m/s) | 3–5 |
| Tpause (s) | 10–30 |
| Buffer size (M) | 500 |
| Message size (Kb) | 2000 |
| Robot message interval (s) | 60, 120 |
| SNs message interval (s) | 1800, 3600 |
| Source nodes | Robot, SNs |
| Destination nodes | MMS |
| Movement model | BPRW |
| Alpha and Beta of DTMA | 0.71, 0.29 |





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}